锚泊定点定位系统的鲁棒控制器设计
2017-08-31苏晓宇
苏晓宇
上海工程技术大学 电子电气工程学院,上海 201620
锚泊定点定位系统的鲁棒控制器设计
苏晓宇
上海工程技术大学 电子电气工程学院,上海 201620
自动锚泊定位系统是实现海洋平台的定点定位重要结构,但由于海洋工作环境的特殊性,往往缺乏稳定性和安全性,且具有输入延时性和约束性。为此,本文在传统锚泊定位系统的基础上,利用三链轮锚机的切换实现4台锚机对12条锚链的控制;采用具有区间时滞相关的鲁棒控制规律对主控制器设计,以抵抗水平方向环境扰动的控制合力,从而实现稳固和安全。仿真结果表明所提出的方法具有有效性及优越性。
定点定位;鲁棒控制器;设计
海洋平台由于海洋环境的作用,自动锚泊定位将产生水平方向上的横荡、纵荡及艏摇运动,影响其正常工作及安全性能[1]。本文在传统锚泊定位系统的基础上,增加了主动收放锚链的控制,并利用三链轮锚机的切换功能来实现4台锚机对12条锚链的控制。由于锚链间的切换及锚链破断强度的限制,导致自动锚泊定位系统具有输入延时性和约束性。为解决上述问题,采用具有区间时滞相关的鲁棒控制规律进行主控制器的设计,以产生抵抗水平方向环境扰动的控制合力。一般来说,时滞相关包含系统的时滞信息,相比于时滞无关方法,保守性更小[2]。现有的对于时滞系统的研究中,多将时滞下界设定为零,选择的Lyapunov函数亦大多未考虑时滞下界信息的影响,这对于时滞下界不为零的系统将产生一定的保守性。因此,具有区间时滞系统的时滞相关稳定性研究获得重视。如文献[3]中采用自由权矩阵方法研究了区间时滞系统的鲁棒稳定性问题,但其忽视了Lyapunov函数导数项中的一些有用项。文献[4]研究了具有区间时变时滞系统的稳定性问题,其选用了合适的Lyapunov函数,并基于所选择的Lyapunov函数提出了一些改进的区间时滞依赖的稳定性准则。文献[5]在构造Lyapunov函数时考虑了时滞下界信息,并引入三次积分项,得到了具有更小保守性的稳定性准则。
本文改进了锚泊定位方案,采用三链轮锚机依次收放锚链,使锚链的张力达到设定值,以保证海洋平台的定点定位。针对方案的工作原理,推导了基于误差向量的区间输入时滞系统的稳定性准则,设计了相应的控制器。所构造的Lyapunov函数中考虑时滞下界信息,并利用自由权矩阵及积分性质来处理Lyapunov导数中的积分项,以降低保守性。
1 系统描述
1.1 自动锚泊定位系统原理
图1为半潜式平台锚泊定点定位系统的原理图。首先计算出平台实时位置与设定位置之间的偏差,再利用所设计的控制器产生平台定位到期望位置所需的水平方向的控制合力,通过张力优化算法得出每条锚链所需达到的张力。继而,随动机构对锚链进行收放控制来确保锚链张力到达设定值,以实现半潜式海洋平台的定点定位。
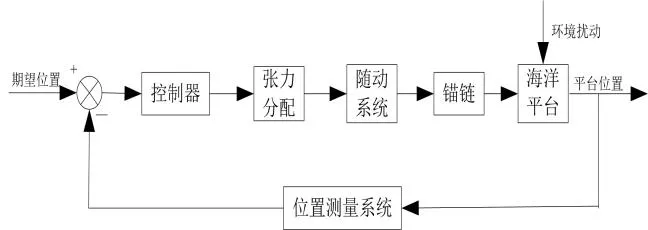
图1 锚泊定点定位系统原理Fig.1 Principle of anchoring fixed point and location system
现有的自动锚泊定位系统未引入切换思想,采用每台锚机控制一条锚链收放的方式来削弱海洋环境的干扰,本方案将其改进为由1台三链轮锚机对3根锚链进行切换控制的方式,在保证定位准确性的基础上降低了系统的总成本。锚机所控制的三条锚链中,仅一条能与锚机的驱动装置结合,另外的两条锚链处于切断状态。当与驱动装置相接合的锚链的张力达到设定值时,发送控制指令进行锚链的切换,驱动装置与第二条锚链接合进行收放,达到设定阈值后,驱动装置再与第三条锚链结合,直到三条锚链均达到张力优化算法计算出的阈值。
1.2 海洋平台数学模型
半潜式海洋平台在海洋扰动的作用下的运动形式包括低频慢漂运动及高频往复运动。其中,低频慢漂运动是平台定位时所需考虑的主导运动[6]。因此,本文忽略高频运动模型的影响,仅涉及低频运动模型[7]。由于锚泊定点定位时平台的运动速度极小,则阻尼力可视为线性的[8],海洋平台水平方向的运动模型为:

式中:η=[x,y,j]T为地坐标系下的半潜式海洋平台纵荡、横荡位移及艏摇角度;v=[u,v,r]T[是随动坐标系下的速度向量;R(Ψ)为地坐标系和随动坐标系之间的旋转矩阵;M是质量矩阵,由惯性矩阵和附加质量矩阵两部分构成;D是总的阻尼矩阵;τ=[Fx,Fy,Nz]T是由锚链张力和海洋扰动力两部分组成的合力(力矩);bÎR3表示未建模的扰动力(力矩)。为降低旋转矩阵间各元素间的相互影响,假定艏向角的变化较小,便可采用小角理论将非线性的旋转矩阵近似为单位阵:η=R(Ψ)v@Iv。同时考虑锚链切换过程中的延时,则式(1)可转化为如下的状态空间形式:

式中:x=[vT,ηT]T为状态变量,u(t-τ)为考虑了输入时滞的纵荡、横荡及艏摇方向上的控制合力(力矩);w(t)为外界干扰向量。系数矩阵τ是系统输入的延迟时间,表示系统的初始条件。其中,延时τ(t)为时变连续函数,且满足均为常数,且时滞下界τ1可以不为0。同时为了防止锚链断裂,增加输入约束:
2 控制器设计
本节主要研究控制器的设计使得闭环系统是渐近稳定的。自动锚泊定位系统需实现海洋平台的任意点定位,即系统的期望输出不恒等于零,因此需定义关于误差向量的控制方式。设系统的期望输出为yd,误差向量为:控制律采用广义误差反馈:



3 仿真研究
为证实所设计控制器的有效性,对在有义波高为7 m,平均风速为26.3 m/s,表面流速为1.03 m/s的海洋扰动下的半潜式海洋平台进行定点定位的仿真研究。采用无因次参数来表示半潜式平台,以方便应用LMI工具箱。无因次的质量矩阵和阻尼矩阵分别为[11]:

设平台期望输出为yd=[0 2 0 1 0 0],在所设计的控制器的控制下,半潜式海洋平台水平方向的运动如图2所示。在具有输入延时的条件下,所设计的控制器仍能实现海洋平台的定点定位,且系统是稳定的。应用本文方法算出的最大允许延时上界为τ2=6.8674 s;而忽略延时下界信息,仅将时滞下界设定为零时,所允许的最大延时上界为τ´2=2.33 s。本文的方法减小了保守性,扩大了所允许的延时上界范围,满足锚泊定点定位系统的延时需求。
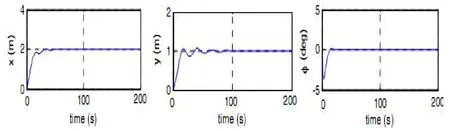
图2 平台水平方向位置输出Fig.2 Position output of the platform in horizontal direction
4 结论
采用具有切换功能的三链轮锚机对半潜式海洋平台进行定点定位,针对所提出方案具有输入延时的特点,设计了基于误差向量的具有区间输入延时的锚泊自动定位系统的控制器。构造了基于时滞上下界信息的Lyapunov函数,利用自由权矩阵及积分性质,有效处理了Lyapunov导数中的积分项,从而降低了保守性,扩大了所允许的延时上界。同时为了防止锚链超出破断强度而产生断裂,在不等式中增加了输入约束,保证了系统的安全性。仿真结果表明,该控制器是可行且有效的。
[1]Lee YS,Moon YS,Kwon WH.Delay dependent robust control for uncertain systems with time-varying state-delay[C].San Diego,CA:Proceedings of IEEE Conference Decision and Control,2001:3208-3213
[2]Xu S,Lam J,Zou Y.New results on delay--dependent robustcontrol for systems with time-varying delays[J].Automatica,2006,42:343-348
[3]Jiang X,Han QL.Oncontrolforlinearsystemswith intervaltime-varying delay[J].Automatica,2005,41(12):2099-2106
[4]He Y,Wang QG,Lin C.Delay range dependent stability for systems with time-varying delay[J].Automatica,2007,43(2):371-376
[5]苏亚坤,陈 兵,李鸿一.具有区间时变时滞系统的镇定[J].黑龙江大学:自然科学学报,2009,26(2):185-189
[6]Stansberg C.Slow-drift pitch motions and air-gap observed from model testing with moored semi submersibles[C].ASME2007.San Diego,California,USA:Ocean,Offshore andArctic Engineering Division,2007:659-668
[7]苏晓宇,金鸿章,姜述强.具有输入延时的锚泊自动定位系统保性能控制[J].控制与决策,2014,29(4):748-752
[8]Berntsen P,Aamo O,Leira B.Ensuring mooring line integrity by dynamic positioning:controller design and experimental tests[J].Automatic,2009,45(5):1285-1290
The Design for Robust Controller of Anchoring Fixed-point and Location System
SU Xiao-yu
School of Electronic and Electrical Engineering/Shanghai University of Engineering Science,Shanghai201620,China
The automatic anchoring location system is a key device for fixed point and location on an ocean platform,however because of particularity in an ocean environment,there is lack of stability,safety and input delay,constraint.Therefore this paper took advantage of switchovers among anchoring machines with three chains gear to obtain the control for 12 anchor chains by four anchoring machines and designed the main controller by robust control law with section lag to resist against environmental disturbance at horizontal direction accordingly to gain the steadiness and safety.The validity and superiority in just mention were confirmed by the simulation.
Fixed-point and location;robust controller;design
U675
A
1000-2324(2017)04-0592-05
2016-04-02
2016-04-20
国家自然科学基金:主动调压式CPR环境下的液压混合动力系统节能和控制研究(51505289)
苏晓宇(1985-),女,博士,讲师.主要研究方向为鲁棒控制,海洋平台定位.E-mail:sxy13936494350@163.com
