改进遗传算法的在轨组装路径规划
2017-08-31孙楚琦吴限德谢亚恩宋婷孙俊王志鹏
孙楚琦,吴限德,谢亚恩,宋婷,孙俊,王志鹏
(1.哈尔滨工程大学 航天与建筑工程学院, 黑龙江 哈尔滨 150001; 2.上海市空间智能控制技术重点实验室 上海航天控制技术研究所,上海 201109; 3.哈尔滨工业大学 卫星技术研究所,黑龙江 哈尔滨 150080)
改进遗传算法的在轨组装路径规划
孙楚琦1,吴限德1,谢亚恩1,宋婷2,孙俊2,王志鹏3
(1.哈尔滨工程大学 航天与建筑工程学院, 黑龙江 哈尔滨 150001; 2.上海市空间智能控制技术重点实验室 上海航天控制技术研究所,上海 201109; 3.哈尔滨工业大学 卫星技术研究所,黑龙江 哈尔滨 150080)
大规模航天器以在轨组装的方式进行空间部署时,常采用交会对接与辅助机构结合工作的方式完成组装,因此组装过程必须为装配过程规划安全的接近路径和工作区域,以避免组装过程中的碰撞风险。在组装卫星的相对轨道运动模型基础上,建立了组装过程中的动态环境模型,针对在轨组装的位置、时间精度的同时优化改进了传统遗传算法,设计了基于改进遗传算法的在轨组装路径寻优方法。仿真结果表明,提出的算法寻求的最优路径能够较好地满足在轨组装的有效性、安全性以及高精度的要求,并且算法收敛性和稳定性好。
在轨服务;在轨组装;遗传算法;路径规划;卫星
受现有火箭运载能力限制,大型航天器无法一次入轨,在轨组装成为当前航天领域主要的发展方向之一。借助在轨服务航天器,能够实现复杂系统组装、能源补充、故障修复等空间任务,这些任务都迫切需要精确有效的在轨组装技术作为支撑。以往的大规模结构的部署,大部分是以对接的方式扩展空间结构,复杂结构的空间构型仅依靠各结构单元自行机动难以构建。现有的空间机械臂等辅助执行机构的发展,可以为在轨组装提供更多选择,在此基础上的最优路径规划成为在轨服务的新兴研究热点。将相对运动模型与智能寻优算法相结合设计轨道机动路径,对提高在轨服务航天器寿命、在轨组装效率和安全性等具有重要意义。
国内外针对轨道机动的路径规划方法包括间接法和直接法[1]。间接法通常用于解决初始条件、终止条件不完全确定的多点边值问题[2],如:Vinh 利用间接法研究了大气层中的飞行器在不同气动环境下的最优飞行轨迹[3],Istratie利用拉格朗日插值法对飞行器再入轨道的热过程进行了最优轨道研究[4],Lu等基于极大值原理求解切比雪夫问题的方法,将寻优问题转化为有约束的轨迹状态求解问题[5]。直接法将控制变量和状态变量离散,将连续轨迹优化转化成离散参数优化,再计算微分方程,算出最优解[6],如:Sims进行了基于小推力的推进轨迹优化研究[7]。康炳南等进行了高超声速飞行器的上升、滑翔和巡航轨迹的优化[8],Kang W等设计了国际空间站大规模姿态调整策略[9]。
从已有研究可以看出,间接法的收敛域小,求解精度较高,且最优解满足一阶最优性必要条件。但间接法的求解过程过于繁琐,推测协态的难度大,寻优过程中路径约束需要转换为静态的终端约束。直接法较间接法相比有着更宽广的收敛域,思路简单明确易于实现。但缺陷在于由于直接法不需要提供主矢量信息,得到的非线性规划解精度不能保证。为改进直接法的寻优速度以及求解精度,常将具有自适应能力的随机搜索算法(genetic algorithm, GA)与直接法相结合。基于这一思路,本文将遗传算法和直接法相结合,针对在轨组装对位置精度和时间精度的双重要求改进了遗传算法的部分设计,提出一种收敛快精度高的组装路径规划策略。
对于在轨组装的研究,多采用直接轨道机动进行对接[10]。其中的轨道机动路径规划,多将路径约束条件考虑成静态约束[11],忽略对接机构自身的运动特性。这些研究中,路径规划的优化对象多为燃料消耗或机动时间[12],针对位置精度和时间精度同时优化的研究较少。而对自旋的目标组装时,既要求对接机构达到指定操作区域又要求在特定时间进行操作,即位置和时间同时最优。本文就在轨组装的路径规划问题展开研究,为组装过程设置安全操作区和动态危险区,提出基于改进遗传算法的路径规划方法,对组装过程中的相对位置精度和时间精度同时规划寻优。
1 在轨组装问题描述
1.1 在轨组装模型
在轨组装任务模型如图1所示,包括组装卫星和待组装卫星两类。本文假设各组装卫星均位于最终逼近段的交会走廊中,在近似同一平面的轨道运行。组装卫星通过轨道机动,将待组装卫星1~n组装成为空间复杂结构体。组装卫星每捕获或组装部分空间对象,将重新规划下一个待组装卫星附近的机动路径。由于待组装卫星平动和旋转的存在,为保证抓取和组装的安全实施,应使组装卫星机动到待组装卫星附近停泊,等待安全组装时机。因此,路径规划的起点是组装卫星所在轨道的位置,规划路径终点为待组装卫星动态旋转区上一点,这与传统点对点式路径规划具有显著差异。除了对位置要求精确,辅助机构针对动态目标的操作也需要在合适的抓捕时机完成,因此在精确位置优化同时进行精确时间优化。

图1 在轨组装任务示意图Fig.1 On-orbit assembly concept scheme
1.2 环境模型设计
定义组装卫星和待组装卫星相对运动坐标系,如图2所示。OXYZ为地心赤道坐标系,其中原点O位于地心,OX指向春分点,OZ垂直于赤道面指向北极,OY和XOZ平面垂直且构成右手坐标系。待组装卫星在地心赤道坐标系的位置矢量为r0,相对运动坐标系ORXRYRZR以待组装卫星质心OR为坐标原点,XR轴沿r0方向向外,YR轴与r0垂直且指向待组装卫星方向,ZR轴与XRORYR平面垂直构成右手坐标系。

图2 相对运动坐标系Fig.2 Relative motion coordinates
组装过程分为机动接近阶段、在轨组装阶段和重新规划阶段,如图3所示。机动接近路径是本文规划的内容,其起点为组装星的初始位置,终点为可行的安全操作区域。安全操作区域S1是组装卫星运动和组装机构回转半径RS1共同确定的球体,表示为
(1)
式中:C(x,y,z)为在相对运动坐标系下组装卫星的位置坐标。
待组装卫星的外露部件(如天线、太阳能帆板等)会因自旋运动而碰撞到组装机构,威胁到2个卫星。因此,组装路径规划时应考虑目标自旋的影响,将待组装卫星的动态旋转包络考虑成危险区S2,并从安全操作区域S1中去除。S2作为动态约束,是待组装卫星的球体包络,半径RS2为组装卫星的自旋半径,旋转中心为待组装卫星质心,具体为
(2)
则组装过程中可行安全操作区域为
(3)
则该区域为组装卫星停泊的区域,即路径规划的终止点区域。

图3 组装过程及操作区设计Fig.3 Assembly process and design for operation area
1.3 组装过程中的运动学模型
在相对运动坐标系中,相对运动方程可写成
(4)
式中:x、y、z分别是组装卫星相对待组装卫星位置矢量在相对运动系下的投影,ω是组装卫星在地心赤道系下的轨道角速度,ax、ay和az分别为组装卫星加速度在相对运动系各轴上的投影。当组装卫星推力作用结束后,其运动过程可视为无外力作用下的自由相对运动,即ax=ay=az=0。该方程的解析解可得出相对运动系下组装卫星的轨道运动模型:
(5)

2 改进遗传算法的路径规划方法
2.1 遗传算法
本文利用遗传算法在有运动约束的解空间中自适应全局优化概率搜索最佳机动路径,算法流程如图4。传统路径规划的输入量一般为在路径规划区域中的坐标集合,算法在该集合中执行寻优,输出为最优路径的点集。本文将规划路径的坐标信息离散成各时刻的状态信息,将位置变量转化成时间变量,通过优化时间信息优化位置信息,从而搜索最优轨迹。因此算法的输入由路径规划区域转化成路径规划时间区间U=[0,a](a为路径规划时间上限)。路径规划的起始时刻和终止时刻在该时间区间中随机选取,将起止时刻输入到运动学模型中可计算出两时刻间的机动路径。根据环境模型设计中的可行操作区域设计适应度函数,评价规划路径在有约束条件的优良程度。迭代过程中通过复制、交叉、变异3种遗传操作对输入的起止时刻进行寻优,在时间寻优的同时进行组装路径的寻优。

图4 遗传算法基本流程Fig.4 Flowchart for GA
由于算法的参数化过程使算法的输入由多变量的位置信息转化成了单变量的时间信息,简化了算法的寻优过程,提高了算法的收敛速度。和以往遗传算法不同的是,本文在一般遗传算法的基础上,改进了遗传算法的编码和变异过程,使算法在规划路径的基础上同时满足在轨组装的位置和时间的精度需求。
2.2 基于改进遗传算法的路径规划
2.2.1 编码方式
根据本文遗传算法设计思路,本文算法的输入量为组装路径规划的时间区间U。首先将时间区间U以一定离散间隔离散成时间点ti(ti∈U,i=0,1,2,…),使组装规划的起止时刻在离散的时间点中进行随机选择,个体为起止时间经运动学模型计算出一条路径,记为(ti,tk)。编码方式采用二进制编码。由于二进制编码只能准确编码整数时刻,对大部分小数时刻只能通过增加个体长度近似,难以满足在轨组装对时间精度和位置精度的要求,限制了算法搜索最优解的范围。针对这一问题,本文为使在寻优中尽可能选择真值运算,设放大系数为α,令Ui′=α×Ui(Ui=[ti,tk]),使随机选取的时间点同时放大,使时间点的部分小数部分转换成整数进行遗传操作,并在在运动学方程中还原,采用这一过程满足精度需求。放大系数的选取取决于组装需求的时间精度。
2.2.2 种群初始化
随机产生n个个体,即生成n种路径规划方案构成初始种群。本文在种群初始化中筛选出能使组装卫星机动到待组装卫星附近的路径,避免其他路径在遗传操作中引入不良基因,加快算法的收敛速度。
2.2.3 适应度函数构建
本文算法中的优化函数为求解相对运动系下组装卫星与待组装卫星的相对距离的最小值。适应度函数则在目标函数的基础上,要求最优路径的终点落在在轨组装阶段的可行操作区域内,包含如下2个部分:
1)安全操作区约束的适应度函数
在轨组装阶段首先需要使组装卫星的路径终点落在能够进行在轨组装的安全操作区S1内。建立如下适应度函数:
(6)
式中r为两卫星之间的相对矢量。
2)动态危险区约束的适应度函数
为避免组装过程中的碰撞风险,组装卫星的路径终点应避免进入在轨组装阶段的动态危险区S2,建立如下适应度函数:
(7)
综合以上适应度函数能够保证组装卫星的路径终点落在可行安全操作区域S内,则该综合适应度函数可表示为
(8)
由式(8)可知,综合适应度越大,规划的路径性能越好。
2.2.4 遗传算子的设计
1)选择算子
选择算子采用比例选择,即赌盘选择,个体被选中并遗传到下一代群体中的概率与该个体的适应度大小成正比。设群体大小为M,个体i适应度为fi,则个体i被选中的概率pi为
(9)
这种选择方式首先保证了所有个体都有几率遗传到下一代,并且适应度高的个体会被优先选择,保证了优良基因可随迭代过程持续传递。
2)交叉算子
交叉算子采用单点交叉算子,即在每代群体中对个体进行随机的两两无重复配对,作为每次交叉的父代个体;并随机选择一节点对附带节点间的部分进行交叉互换,互换后的个体形成新的子代继续下一步操作,交叉过程如图5所示。

图5 交叉算子操作流程
Fig.5 Crossover operator
3)改进变异算子
变异算子作为遗传算法中主要的局部搜索方法,在本文中对于个体中时间精度的搜索应具备自适应性。这种自适应性的特点体现在:
①算法迭代初期,为扩大算法的搜索域,应提高变异概率,但此变异概率应随迭代的进行逐渐降低,降低因优良个体基因上某一位的突变造成不良基因引入的可能性;
②由于个体存储的是时间信息,个体中的每一位时间信息代表的时间精度不同。不同基因位的突变会导致时间信息的改变程度不同。
图6可以看出,时间信息从高位到低位代表的时间精度存在差异,在迭代初期为增大搜索域可以提高高位基因变异概率,当进入到迭代的中后期,随着算法逐渐收敛,为寻找高精度的最优解,应主要调整时间信息的中低位。该微调过程应降低高位基因的变异概率,增大中低位基因的变异概率,提高算法逼近最优解的能力。

图6 时间信息中不同位包含的精度差异Fig.6 Accuracy difference in different time gene locus
文献[13]指出,对于单一变量采用指数函数拟合变异性能更适用于群体的进化过程。基于这种思路,本文提出一种以个体基因位置和迭代次数为自变量的二元自适应变异概率函数。其公式为
(10)
式中:Pm为每一代中每一个基因位下的变异概率;Pmax为变异概率的最大值;t为当代迭代次数,S为设定迭代总步数,s∈[1,S];λ为一设计常数;X为个体的基因位置。函数图像如图7所示。
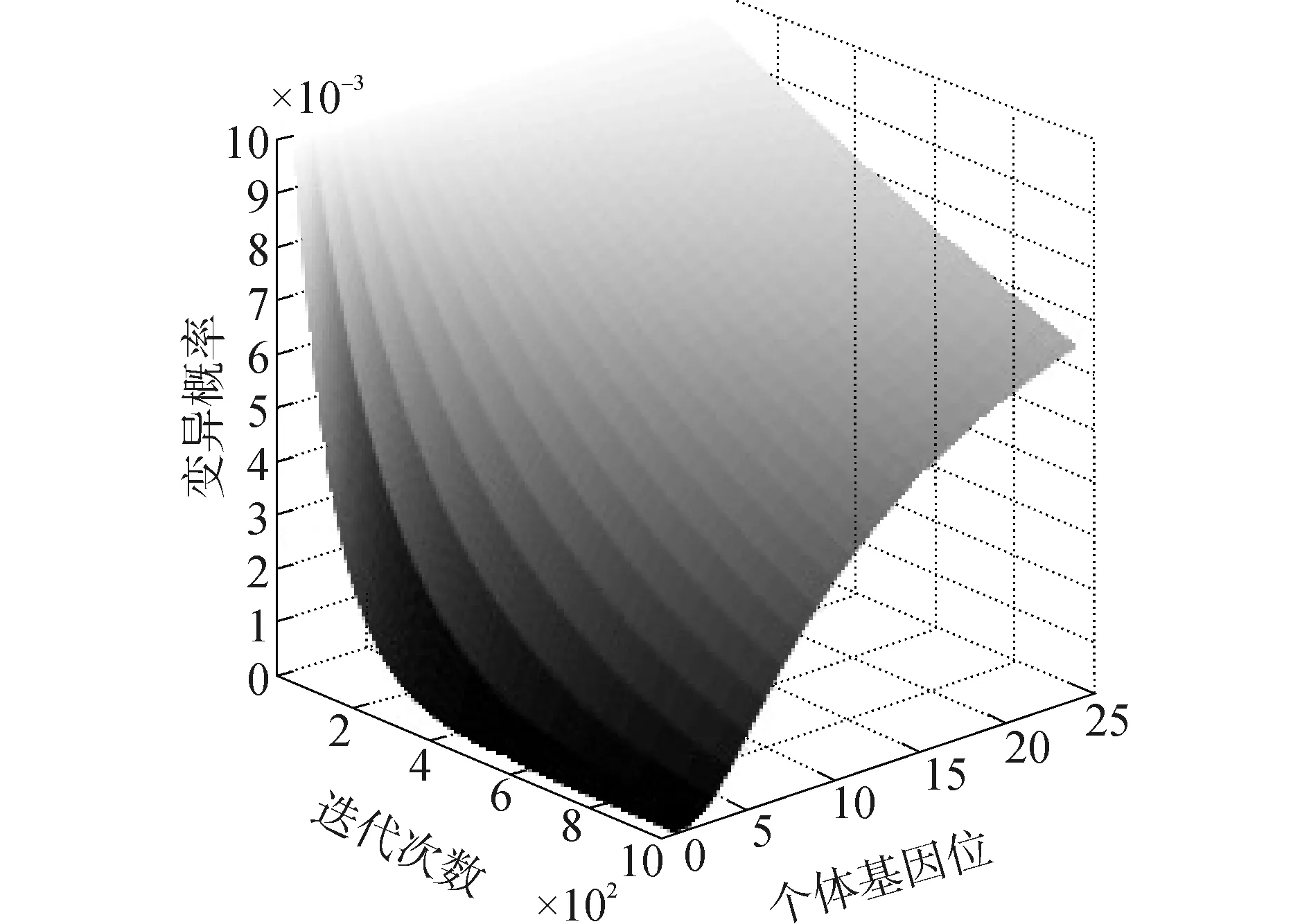
图7 自适应变异算子函数图像Fig.7 Adaptive mutation operator
这种改进遗传算子的设计可提高群体的多样性,提高算法的局部搜索能力,并随着迭代进行自适应调整,能够更好更快提升最优解精度。
3 仿真分析
为验证算法的正确性和有效性,本文运用Matlab对文中提出的算法进行仿真实验。以两星在轨组装的路径规划为例,假设组装卫星与待组装卫星处于相同轨道平面,初始时刻相对静止。组装卫星A在相对运动系下的初始相对位置为[0,-0.05,0](km),S1半径为3m,S2半径为0.1m,任务规划在一个轨道周期内完成。初始种群个体数为20,放大系数α=1 000,个体长度为48,变异概率极值Pmax=0.01,设计常数λ=10,算法进行1 000次迭代。仿真结果如图8所示。
图8可看出算法的各项性能。图8(a)、(b)中可以看出经算法规划的最优路径能够保证组装卫星的路径终点在组装规划阶段的可行操作区域。图8(c)与图8(d)说明了算法对于位置和时间精度优化的性能,随着迭代的进行相对位置和机动时间能够进行同时优化,并且位置和时间精度能够满足在轨组装的精度需求,并且算法在200次迭代左右即可寻找到最优路径。体现了算法的稳定性和收敛性。


图8 算法仿真效果Fig.8 Algorithm simulation
4 结论
本文针对服务航天器和辅助机构协同操作的在轨组装任务提出了在轨组装路径规划方法,结论如下:
1)通过对在轨组装任务分析,在该路径规划中设计了包括辅助设备操作区域和避免与动态目标碰撞的危险区的动态模型,满足任务需要。
2)针对轨迹优化过程中位置精度和时间精度同时优化的需求,改进了传统遗传算法,最后通过仿真验证了本文算法的有效性。
3)由仿真结果可得,算法能够为在轨组装航天器规划出满足机动要求和组装要求的机动路径,算法能够以一定精度完成位置和时间的同时优化。算法性能优异,能够为在轨组装任务设计中的机动路径规划提供了求解方法和优化思路。
[1]ZHANG S, FRISWELL M I, WAGG D J, et al. Rapid path planning for zero-propellant maneuvers[J]. Journal of aerospace engineering, 2015, 29(3): 04015078.
[2]郭铁丁. 深空探测小推力轨迹优化的间接法与伪谱法研究[D]. 北京:清华大学, 2012: 4-7. GUO Tieding. Study of indirect and pseudospectral methods for low thrust trajectory optimization in deep space exploration[D]. Beijing: Tsinghua University, 2012: 4-7.
[3]VINH N. Optimal trajectories in atmospheric flight[M]. Amsterdam: Elsevier Scientific Publishing Company, 2012:78-100.
[4]ISTRATIE V. Optimal entry into atmosphere with minimum heat and constraints[C]∥Atmospheric Flight Mechanics Conference and Exhibit. Austin, Texas, USA, 2013: 1-3.
[5]PING L U, VINH N X. Optimal control problems with maximum functional[J]. Journal of guidance control & dynamics, 1991, 14(6): 1215-1223.
[6]HUANG G Q, LU Y P, NAN Y. A survey of numerical algorithms for trajectory optimization of flight vehicles[J]. Science China technological sciences, 2012, 55(9): 2538-2560.
[7]SIMS J A, FINLAYSON P A, RINDERLE E A, et al. Implementation of a low-thrust trajectory optimization algorithm for preliminary design[M]. Pasadena: CA, Jet propulsion laboratory, national aeronautics and space administration, 2006: 1-8.
[8]康炳南, 唐硕. 基于非线性规划的高超声速滑翔轨迹优化[J]. 飞行力学, 2008, 26(3): 49-52. KANG Bingnan, TANG Shuo. Optimization of hypersonic glide trajectory based on nonlinear planning[J]. Flight dynamics, 2008, 26(3): 49-52.
[9]KANG W, BEDROSSIAN N. Pseudospectral optimal control theory makes debut flight, saves NASA $1 M in under three hours [J]. SIAM news, 2007, 40(7): 1-3.
[10]MUELLER J B, GRIESEMER P R, THOMAS S J. Avoidance maneuver planning incorporating station-keeping constraints and automatic relaxation[J]. Journal of aerospace information systems, 2015, 10(10): 306-322.
[11]SCHAUB H, VADALI S R, ALFRIEND K T. Initial condition and fuel optimal control for formation flying satellites[C]//AIAA Guidance, Navigation and Control Conference. Portland, USA: 1999: 1-10.
[12]MANOLESCU S. Optimal symmetric trajectories over a fixed-time domain[J]. AIAA Paper, 1993: 93, 3848.
本文引用格式:
孙楚琦,吴限德,谢亚恩,等. 基于改进遗传算法的在轨组装路径规划[J]. 哈尔滨工程大学学报, 2017, 38(7): 1167-1172.
SUN Chuqi, WU Xiande, XIE Yaen, et al. On-orbit assembly trajectory plan based on improved genetic algorithm[J]. Journal of Harbin Engineering University, 2017, 38(7): 1167-1172.
On-orbit assembly trajectory plan based on improved genetic algorithm
SUN Chuqi1, WU Xiande1, XIE Yaen1, SONG Ting2, SUN Jun2, WANG Zhipeng3
(1.College of Aerospace And Civil Engineering, Harbin Engineering University, Harbin 150001, China; 2.Shanghai Key Laboratory of Space Intelligent Control Technology, Shanghai Institute of Spaceflight Control Technology, Shanghai 201109, China; 3.Research Center of Satellite Technology, Harbin Institute of Technology, Harbin 150001, China)
For the space deployment of large-scale spacecraft assembly on orbit, the vehicle is generally operated by rendezvous and docking, as well as auxiliary devices. A secure plan for approaching the trajectory and operation area is necessary to avoid collision risk during assembly. To assemble the relative track motion model of satellite, a dynamic environment model was established in the assembly process. A traditional genetic algorithm was improved by focusing on the on-orbit assembly location and time precision, and an on-orbit assembly path optimization method was designed on the basis of the improved genetic algorithm. The simulation result shows that the optimal path sought by the proposed algorithm can properly meet the effectiveness, safety, and high-precision requirement of on-orbit assembly. In addition, the convergence and stability of the algorithm are excellent.
on orbit service; on orbit assembly; genetic algorithm; trajectory plan; satellite
2016-09-22.
日期:2017-04-27.
国家高技术研究发展计划项目(2013AA122904);国家自然科学基金青年项目(11302127);黑龙江省自然科学基金项目(F2015032);哈尔滨市青年科技创新人才基金项目(2013RFQXJ001);中央高校基本科研基金项目(HEUCFD1406).
孙楚琦(1992-), 男, 硕士研究生; 吴限德(1979-), 男, 副教授.
吴限德,E-mail:xiande_wu@163.com.
10.11990/jheu.201609074
V448.234
A
1006-7043(2017)07-1167-06
网络出版地址:http://www.cnki.net/kcms/detail/23.1390.u.20170427.1407.044.html
