仿海蟹机器人自主游动性能研究
2017-08-31王刚陈曦靳励行王海龙闫兴亚贾鹏
王刚,陈曦,靳励行,王海龙,闫兴亚,贾鹏
(1.哈尔滨工程大学 水下机器人技术重点实验室,黑龙江 哈尔滨 150001; 2. 黑龙江工程学院 机电工程学院,黑龙江 哈尔滨 150050; 3.哈尔滨工程大学 机电工程学院,黑龙江 哈尔滨 150001)
仿海蟹机器人自主游动性能研究
王刚1,陈曦2,靳励行3,王海龙3,闫兴亚3,贾鹏3
(1.哈尔滨工程大学 水下机器人技术重点实验室,黑龙江 哈尔滨 150001; 2. 黑龙江工程学院 机电工程学院,黑龙江 哈尔滨 150050; 3.哈尔滨工程大学 机电工程学院,黑龙江 哈尔滨 150001)
为了研究两栖仿生机器人,采用计算流体动力学(CFD)方法对双游泳足推进仿海蟹机器人自主游动机理进行研究。建立仿海蟹机器人自主游动计算模型,以双桨协同步态为例对游泳足推进的仿海蟹机器人水动力性能进行了模拟,探讨了自主游动过程中运动学和力学参数的时间历程规律,分析了游泳足运动参数对自主游动速度和推进效率的影响,提取了三维流场结构,从涡动力学角度揭示了自主游动过程中水动力的产生机理。搭建了自主游动实验平台,针对双桨协同步态和双桨交错步态两种推进形式进行了对比实验,验证了水动力学分析的正确性。
仿海蟹机器人; 自主游动; 双桨协同步态; 水动力; 游泳足
近年来,海洋的战略地位和价值越来越高,人们对海洋的探索也越来越深入。现有的螺旋桨推进以其较大的推力和较好的稳定性已经被广泛应用于水下推进器,但是螺旋桨推进系统体积庞大,能耗较高,在推进过程中产生的涡量和噪声使其隐蔽性大大降低,在浮游生物密布的海域,螺旋桨易损坏。海洋生物翱翔于水中,具有良好的机动性和适应性,以此为基础的仿生推进作为一种新型的推进方式为水下推进提供了一种新思路。仿生推进按照仿生对象的不同可以分为:仿鱼胸鳍/尾鳍推进、仿海龟水翼推进、仿蛇类蜿蜒推进、仿乌贼喷射推进等[1-5],这些推进方式各有特色。三疣梭子蟹栖息于浅滩环境,经过长期的自然选择和进化,已经具备了优越的两栖运动性能。生物海蟹在水下不但能够通过步行足爬行,还能够利用身体后侧的两条游泳足实现水下浮游[6]。
水下推进方式的传统分析方法是将仿生机器人及其推进装置位置固定,将游动速度以相对速度的方式施加给入口水流[7]。由于仿生推进方式的机器人游动速度往往是动态的,采用这种非自主游动方式分析仿生推进并不能真实反映出机器人在推进过程中的动力学性能,WU Chuijie通过研究发现鱼体在非自主游动和自主游动时的水动力学性能并不一致,因此这种方法不能正确反映机器人游动的流场[8]。本文将机器人机体及拍动装置的自由度释放,随着拍动装置的运动,机器人的运动速度及姿态实时变化,即“自主游动”[9]。自主游动是机器人运动学和水动力学耦合的过程。国内外关于机器人自主游动的研究较少,Carling[10]和Kern[11]利用数值计算的方法研究了鳗鱼的自主游动性能,Yang研究了亚鲹科鱼的自主游动[12]。在自主游动中,推进装置的拍旋改变了周围的流场,产生了机器人驱动的水动力,同时变化的流场也时刻反作用在机体和游泳足上,影响机体的运动状态,并在二者的相互作用下,最终达到平衡和稳定。
采用生物海蟹做为仿生原型提出了一种新型的仿生推进方式:仿海蟹游泳足推进。设计了仿海蟹机器人样机,并对其水下自主游动性能进行了仿真和实验研究,分析了仿海蟹机器人游动速度、姿态以及能耗等运动状态参数与游泳足拍动规律的关系,得到了相关性能曲线,并对自主游动的流场进行了研究。
1 仿海蟹机器人样机及水下推进模型
1.1 海蟹生理特性研究及仿海蟹机器人建模
三疣梭子蟹栖息于近海浅滩中,具有一对螯足,三对步行足和一对游泳足,如图1所示,能够以步行足进行水下和陆地爬行,以游泳足进行水中浮游[6]。游泳足分布在躯干后侧,作为水下游动肢体,其末端扁平如桨,增大了拍水阻力,多个关节串联的结构形式能够实现复杂的拍动规律,从而实现水下多姿态游动。通过对生物海蟹生理结构和运动规律的观察,经过简化和提取,设计了具有足桨混合驱动功能的两栖仿海蟹机器人样机,如图2所示。

图1 三疣梭子蟹仿生原型[6]Fig.1 Bionic model of swimming crab (Portunus)[6]

图2 仿海蟹机器人样机Fig.2 Prototype of crablike robot
足桨混合驱动的两栖仿海蟹机器人具有三对步行足和一对游泳足,其控制系统、电源系统及传感器等安放于躯干中央的密封箱内,通过水密接头与外部驱动器实现数据和能量的交互。步行足是主要的陆地运动单元,且为机器人的陆地运动提供足够的支撑[13]。游泳足是主要的水下推进单元,通过观察发现,海蟹的游泳足虽然关节众多,但是对水下游动起主要作用的是左右摇动、前后划动和上下拍动3个自由度;通过上述3个自由度以不同规律的耦合运动,能够达到不同的推进效果,实现水下多姿态游动,因此设计3自由度游泳足。
1.2 水下浮游模型的建立及数值计算方法
1.2.1 仿真模型及网格划分
仿海蟹机器人在水下游动时,主要依靠位于机器人后侧的游泳足拍动产生水动力,而步行足则收敛在机体两侧以减小水阻,此时机器人水下浮游模型,如图3所示。

图3 仿海蟹机器人水下浮游模型Fig.3 Subsea floating model of crablike robot
在自主游动的数值计算中,步行足不起推进作用且迎流面积较小,保留步行足会增加流场网格的复杂性,因此将步行足省略,并将机体简化,提高计算效率。在自主游动过程中,仿海蟹机器人不断向前游动,因此要求计算区域有足够的长度以满足运动空间的需要,也需要足够的空间保证流场充分发展;在进行了多次网格划分和实验计算之后,确定计算域的长度、宽度和高度,如图4所示。
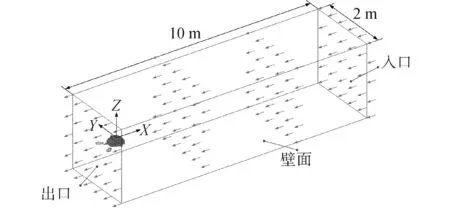
图4 机器人自主游动计算域Fig.4 Computation domain of free swimming
在网格划分过程中,从游泳桨表面起由内到外网格逐渐由密变疏进行划分。由于游泳桨的设计厚度为3 mm,是整个计算体中的最小长度,为了能够准确反映游泳桨尾涡脱落情况,以3 mm为最小划分长度对游泳桨各边进行划分;对于机器人本体,最小长度设为6 mm;对于机器人外围流域,则以14倍的最小长度为单位进行划分。由此得到计算网格,网格数量为1 792 124,其最大畸变因子为0.79,并且畸变因子在0.7~0.8的网格数量占总网格数量的0.45%,96.46%的网格都控制在畸变因子0.6以里,从而可以确保机器人在运动过程中网格质量不发散。
1.2.2 游泳足运动模型
游泳足具有三个自由度,能够实现上下拍动、摇桨和前后划动。对于单个游泳足来说,定义惯性坐标系O-X1Y1Z1和随体坐标系O-XYZ,如图5所示。惯性坐标系原点选在游泳足与机器人躯体的连接点处,定义为游泳足的旋转中心,OX沿游泳足中轴线方向指向机体,OY与游泳足表面平行指向机体左侧,OZ方向垂直于游泳足表面竖直向上。
在随体坐标系下,定义游泳足上下拍动角φFL,摇桨角φFE,前后划动角φR,随时间变化规律采取正弦函数的形式:
(1)
式中:φFLC、φFEC、φRC分别为上下拍动、摇桨、前后划动角度的平均值,φFLA、φFEA、φRA分别为上下拍动、摇桨、前后划动角度的幅值,ωFL、ωFE、ωR分别为上下拍动、摇桨、前后划动的角速度,dφFL、dφR分别为上下拍动、前后划动相对于摇桨的相位角。
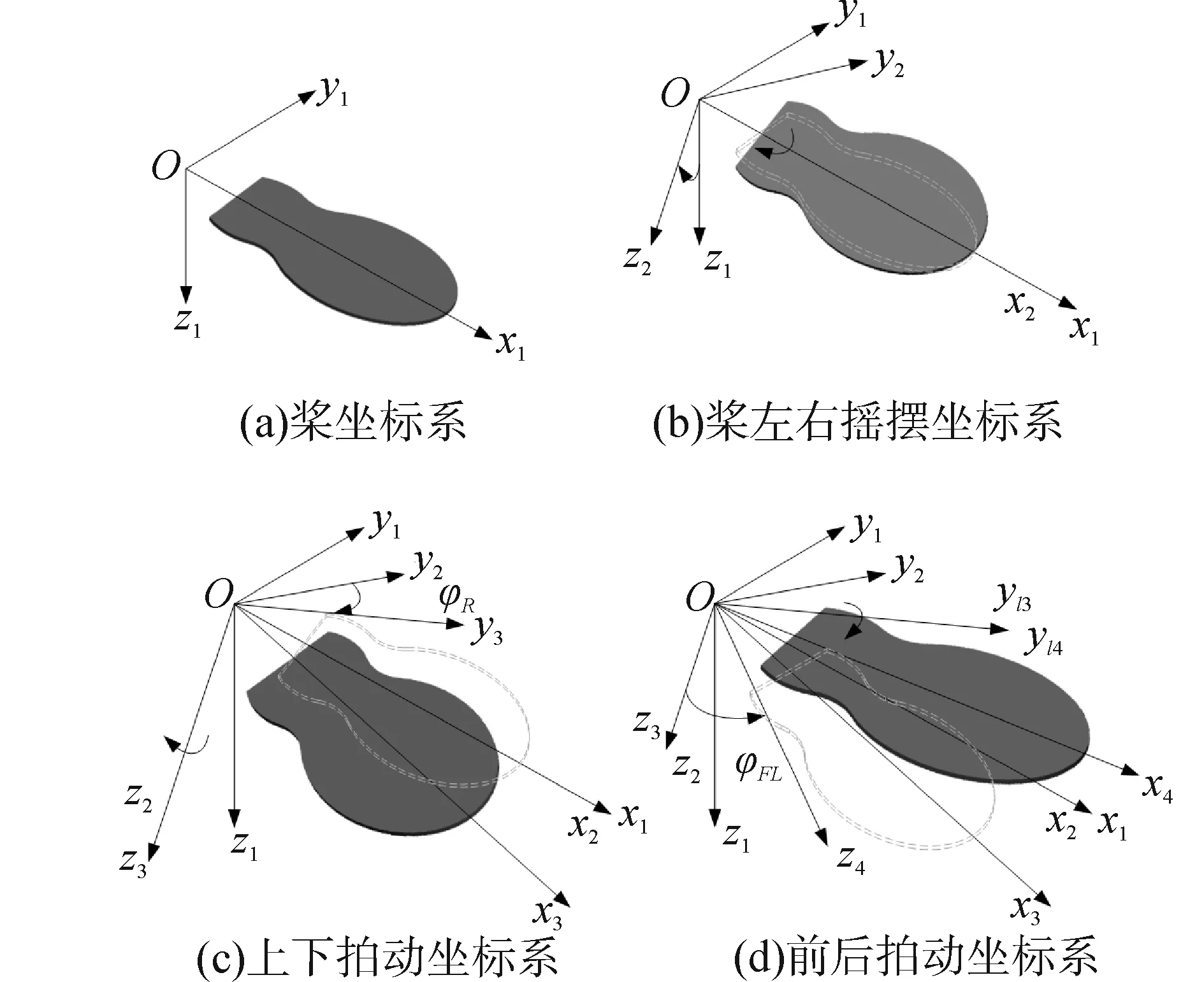
图5 游泳足运动坐标系Fig.5 Coordinate system of swimming paddle
1.2.3 机器人自主游动动力学
在自主游动计算中,假定仿海蟹机器人在X方向(推进方向)是自由运动的,忽略其余方向的运动,因此由牛顿第二定律可知其前进速度为
(2)
式中:vi(i=1,2,3)分别代表机器人在x、y、z3个方向的游动速度;vi0(i=1,2,3)为机器人在x、y、z3个方向的初始游动速度;m为机器人的总质量;Fi(i=1,2,3)为机器人在x、y、z3个方向的受力;初始时刻,机器人处于静止状态,当两个游泳足开始拍动后,机器人的游动速度逐渐增加,直至达到稳定,因此机器人将从静止加速到稳定状态。在仿海蟹机器人游动的过程中,步行足与机体相对固定,游泳足的拍动桨质量较小,可以认为机体绕质心的转动惯量是恒定的,得到机器人游动过程中姿态角与受力关系为
(3)

1.2.4 水动力性能参数的定义与求解
机器人游泳足拍动时受到OX轴正向的力是机器人游动的主动力,称之为推进力FX,OZ方向的力影响机器人的浮沉,称为升力FZ,OY方向的力影响机器人的转向,称为侧向力FY。
机器人的游泳足在拍动时将对水做功,输入功率是游泳足在拍水过程中克服水阻力所消耗的功率,称为输入功率,其数值为游泳足沿各方向所受到的扭矩Mi与对应的角速度ωi的乘积之和:
(4)
这些能量中推动机器人向前游动的部分被称为有效功率或输出功率,数值为游泳足推进方向受到的力与前进速度的乘积:
Pe=Fxvx
(5)
推进效率为每个周期内的平均有效功率和平均输入功率的比值,其数值代表游泳足水动力中用于推进的有效功率在输入功率中所占的比重:
(6)
2 仿海蟹机器人自主游动算例分析
2.1 双桨协同步态推进性能分析
游泳足三关节以不同规律耦合时能够产生不同的运动效果,为了分析仿海蟹机器人的自主游动性能,经过参数寻优,选取能得到较大推进力的两自由度推进模式,设定两侧游泳足运动相位差为0°,即双桨协同步态,进行数值计算。此时,两侧游泳足的运动规律如表1所示。

表1 游泳足运动参数
考虑到仿海蟹机器人游泳足的特殊几何结构和运动模式,经过反复试算,采用SIMPLE算法求解雷诺平均纳维-斯托克斯方程,湍流模型为SSTk-ω。假设来流速度为零,机器人在水中由静止开始运动,游泳足拍动频率为1 Hz。得到的自主游动过程中机体移动速度、游泳足受力、功率与效率曲线如图6所示。

图6 双桨协同推进性能曲线Fig.6 Performance curves of synergy sculling of double paddles
通过算例分析,得到如下结论:
1)仿海蟹机器人的游动速度并不是恒定的,而是在每个周期内以一定均值上下波动,结合对单侧游泳足的水动力分析[7]可知,这是由于游泳足拍动产生的推进力并不是恒定的;由图6(c)可知,协同摇桨时,两侧游泳足所受的侧向力方向相反,相互抵消,因此作用在机体上的侧向力为0,将不产生侧向位移;从第三个运动周期开始,机器人受力开始趋于稳定,进入稳定后机体所受升力存在幅值小于推进力的波动,但与推进力不同,升力在一个周期内的平均值几乎为0,即机体在一个周期内的合升力作用较小,因此机体的垂向位移几乎为0。由于游泳足置于机体后侧,游泳足和机体的旋转中心并不重合,游泳足产生的升力会导致机体出现周期性的俯仰运动,图6(d)机体所受力矩可以看出,机体在运动中所受横滚力矩和偏航力矩均为0,因此是可以保证直航运动的,但存在俯仰力矩。
仿海蟹机器人的加速过程就是游泳足推进力与机体阻力此消彼长的过程,机器人游速的增速逐渐降低,这说明周期内合力逐渐减小,直至二力相等,合力为0,此时机器人的平均游动速度达到最大值。
2)随着游泳足推进力和游动速度的波动,自主游动的输入功率和有效功率在一个周期内也呈波动状态,每个周期有两个峰值和谷值,有效功率的数值不全为正值,当有效功率为负值时对应游动速度的下降。在机器人加速至动态稳定的过程中,每个周期的平均效率逐渐增大,并渐趋收敛,时平均效率为7.75%。
2.2 仿海蟹机器人自主游动流场分析
在双桨协同步态的一个周期内,仿海蟹机器人游泳足摆动姿态及流场涡量如图7所示。在每个摇桨周期的上挥和下拍冲程各从桨梢脱泻形成一个涡环,两漩涡配成一对脱落到停止涡中,在水流的作用下逐渐耗散;当上挥和下拍2阶段时间间隔较短时,每个周期形成的停止涡和上个周期脱泻的起始涡会有相同旋转方向,使2个涡环相互链接,构成链式尾涡结构。截取至第5个拍动周期,在游泳足后方的流场中存在10对上下交替排列的涡环结构。由图可见,左右2个游泳足的运动规律相同,因此其后续流场的涡量也是相同的;自主游动过程中游泳足的拍动产生的涡是两排两列的反卡门涡街,机器人不断向前游动,游泳足产生的涡量在此过程中逐渐脱离。每个周期游泳足后侧产生并脱落上下2个涡团,对应游泳足推进力周期内的2次波动。

图7 压力渲染的涡量云图Fig.7 Vorticity nephogram rendered by pressure
3 仿海蟹机器人自主游动实验
3.1 自主游动实验平台
为验证理论分析和数值计算的正确性,研制了足桨混合仿海蟹机器人实验样机“CRABOT”及自主游动实验平台,其总体结构布局如图8所示。

图8 仿海蟹机器人自主游动实验平台Fig.8 Experimental platform of CRABOT for free swimming
仿海蟹机器人自主游动实验平台由游动测试水池、实验样机、控制及传感系统组成。实验水池长3 m,宽2 m,高1 m,水体保持相对静止,可满足样机直航运动性能的测量;水池材质为玻璃,透明的外壁便于观察机器人游动过程中的位姿。实验样机由6条步行足、2条游泳桨、躯干和控制箱体4部分组成,长710 mm,宽350 mm,高230 mm,重约6.7 kg,样机体态外形参和各肢体参数照前文提到的三疣梭子蟹样本,控制系统固放到密封舱体内,机体由上下板及其连接件组成,作为其余部分的支撑,为运动部件和控制系统提供了安装和定位;控制箱体是一个防水密封箱,它穿过机体上板,安放在机体下板上,控制箱的体积较大,是产生浮力的主要部件,控制箱内部安放控制器。采用以PC104为核心的嵌入式控制器,与机器人携带的各种传感器连接,采集环境信息和机器人状态信息并对这些数据进行处理,综合计算后产生运动指令,发送给驱动执行层,最终实现运动控制。控制系统安放在机体密封箱体内,箱体的两侧加工有4个水密接头安装孔,通过这4个水密接头,控制系统与外部驱动元件和传感器进行数据和能量交互。机体内配有MTi-G-700姿态传感器,能够采集各个方向的倾角、速度和位移。
3.2 对比实验
为了深入研究仿海蟹机器人的自主游动性能,分别对游泳足在摆动频率为0.5~1.5 Hz时双桨协同步态及双桨交错步态(即:两侧游泳足运动相位差为180°)进行了实验研究,两种运动模式如图9所示。

图9 机器人自主游动过程Fig.9 Motion snapshots of free swimming process
通过对比协同和交错两种步态,发现采用协同步态时,机体发生纵摇,而交错步态时机体发生横摇,前者在浮游过程中迎流面积大于后者,因此所受阻力更大,相同频率下稳态速度均低于交错拍动。当频率为1 Hz时,仿海蟹机器人双桨协同和交错步态的机器人浮游速度曲线如图10所示。
由图可知,实验得到的速度曲线规律与仿真相同,游动速度处于上下波动的状态,最终达到动态稳定,双桨协同步态的稳态平均速度为0.17 m/s,双桨交错步态的稳态平均速度为0.2 m/s。交错步态的速度波动较小且平均速度大于协同步态。实验中,由于不存在网格收敛等因素影响,机器人在第9个周期即可达到动态稳定;实验测得的游动速
度更小,这是因为数值计算中,机器人只有向前游动一个方向的自由度,忽略了运动中的纵摇和横摇因素,而纵摇中俯仰角的变化会增大机器人的迎流面积,从而增大游动阻力;此外,仿真环境是一个理想化的环境,实验中机器人游动会受到如水的扰动以及游动区域壁面效应等因素对机器人的游动性能的影响。
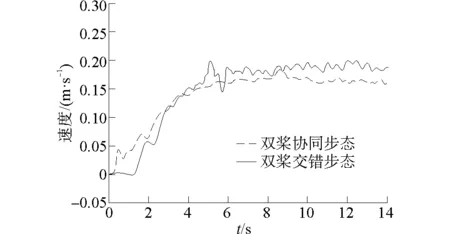
图10 不同步态下的游动速度曲线Fig.10 Curves of swimming velocities in different gaits
双桨协同步态和交错步态在不同频率下的平均速度及平均输入功率曲线如图11所示。二者的平均游动速度以及输入功率均随频率的增大而增大,同时均存在转折点。双桨协同步态的浮游速度在1.1 Hz后渐趋平稳,输入功率的增速也逐渐放缓,这是由于关节驱动器在较高频率下运动时性能受限所致。两种步态在不同拍动规律下的输入功率数值相差较小,但交错步态的游动速度更高,这说明交错拍动有着更高的运动效率。

图11 机器人在不同摆动频率下的性能比较Fig.11 Performance contrast of robot in different flapping frequency
4 结论
本文以生物海蟹为仿生原型,研制了仿海蟹两栖机器人样机,并通过对陆地行走和水下游动性能的仿真和实验,进一步验证了其结构设计的合理性和两栖运动能力。论文的主要研究成果和创新点如下:
1)通过对生物海蟹生理结构和运动规律的观察,设计了高度仿生的仿海蟹两栖机器人,并搭建了控制系统。仿海蟹机器人的步行足采用并联五杆机构,对关节扭矩进行了合理分配,大大提高了机器人负载能力;对海蟹游泳足生理结构和运动规律进行了提取和简化,设计了能够模仿生物海蟹游泳足运动规律的游泳足。
2)对步行足的运动性能进行了分析。不同于以往的步行足结构,仿海蟹机器人步行足采用并联五杆机构,对此进行了运动学和动力学求解,并以平面直行三角步态为例对整机动力学进行了仿真。搭建了MATLAB与ADAMS的联合仿真平台,测试了仿海蟹机器人的转向性能。
3)对游泳足的运动性能进行了分析。对仿海蟹机器人三维样机进行了简化,编写了自主游动的UDF文件,建立了自主游动样机模型;以游泳足两自由度拍动为例,对仿海蟹机器人自主游动性能进行了仿真验证,并对比了不同频率及约束游动时的游泳足水动力学性能。
4)对仿海蟹机器人的运动性能进行实验分析。结合前面章节的仿真分析,分别对单步行足进行了结构验证实验;对仿海蟹机器人样机进行水下游动实验,并对游泳足相同拍动规律下协同拍动和交错拍动时机器人的游动性能进行了分析。
[1]夏丹,陈维山,伍志军,等. 鲹科模式机器鱼自主游动的水动力特性研究[J].机械工程学报,2013,21: 54-61. XIA Dan, CHEN Weisan, WU Zhijun, et al. Research on hydrodynamics of carangiform mode robotic fish swimming under self-propulsion[J]. Journal of mechanical engineering, 2013, 21: 54-61.
[2]MAZOUCHOVA N, UMBANHOWAR P B, GOLDMAN D I. Flipper-driven terrestrial locomotion of a sea turtle-inspired robot[J]. Bioinspiration & biomimetics, 2013, 8(2): 653-668.
[3]WANG Zhaoli, SU Yumin, LI Yanli, et al. Hydrodynamic analysis of a mechanical pectoral fin in unsteady flow[J]. Journal of harbin engineering university, 2009, 30(5): 536-541.
[4]LILJEBACK P, PETTERSEN K Y, STAVDAHL R, et al. A review on modeling, implementation, and control of snake robots[J]. Robotics and autonomous systems, 2012, 60(1): 29-40.
[5]VILLANUEVA A, SMITH C. A biomimetic robotic jellyfish (robojelly) actuated by shape memory alloy composite actuators[J]. Bioinspiration & biomimetics, 2011(6): 036004.
[6]HONSA K J, GOVIND C. Structural definition of the neuromuscular system in the swimming-paddle opener muscle of blue crabs[J]. Cell tissue res, 2002, 307(3): 411-421.
[7]王海龙,王刚,陈曦,等. 仿海蟹机器人浮游步态动力学建模与运动控制[J]. 机器人,2015,02: 176-187. WANG Hailong, WANG Gang, CHEN Xi, et al. Dynamic modeling and motion control of a crablike robot in floating gait[J]. Robot, 2015, 02: 176-187.
[8]WU Chuijie, WANG Liang. Numerical simulations of self-propelled swimming of 3D bionic fish school[J]. Science in China series E: technological sciences, 2009, 52(3): 658-669.
[9]WANG Wenquan, YIN Rui, HAO Dongwei, et al. Modeling and simulation of fish-like swimming in a straight-line swimming state using immersed boundary method[J]. Advances in mechanical engineering, 2014(11): 1-10.
[10]CARLING J, WILLIAMS T L, BOWTELL G. Self-propelled anguilliform swimming: simultaneous solution of the two-dimensional Navier-Stokes equations and Newton′s laws of motion[J]. Journal of experimental biology, 1998, 201(23): 3143-3166.
[11]KERN S, KOUMOUTSAKOS P. Simulations of optimized anguilliform swimming[J]. Journal of experimental biology, 2006, 209(24): 4841~4857.
[12]YANG Yan, WU Guanhao, YU Yongliang, et al. Two-dimensional self-propelled fish motion in medium: an integrated method for deforming body dynamics and unsteady fluid dynamics[J]. Chinese physics letters, 2008, 25(2): 597-600.
[13]CHEN Xi, WANG Liquan, YE Xiufen, et al. Prototype development and gait planning of biologically inspired multi-legged crablike robot [J]. Mechatronics, 2013, 23(4): 429-444.
本文引用格式:
王刚,陈曦,靳励行,等. 仿海蟹机器人自主游动性能数值计算及实验研究[J]. 哈尔滨工程大学学报, 2017, 38(7): 1072-1078.
WANG Gang, CHEN Xi, JIN Lixing, et al. Numerical and experimental study on free swimming performance of crablike robot[J]. Journal of Harbin Engineering University, 2017, 38(7): 1072-1078.
Study of the free-swimming performance of a crab-like robot
WANG Gang1, CHEN Xi2, JIN Lixing3, WANG Hailong3, YAN Xingya3, JIA Peng3
(1.State Key Laboratory of Autonomous Underwater Vehicle, Harbin Engineering University, Harbin 150001, China; 2.College of Mechanical and Electrical Engineering, Heilongjiang Institute of Technology, Harbin 150050, China; 3.College of Mechanical and Electrical Engineering, Harbin Engineering University, Harbin 150001, China)
In this research, the subsea free-swimming mechanism of a crab-like robot was studied using the computational fluid dynamics (CFD) method in order to research the amphibious bionic robots. First, a calculation model of the crab-like robot that considered the free-swimming mechanism and the synergic sculling gait was established. Furthermore, the hydrodynamic performance of the crab-like robot was investigated and the time histories of the kinematic and dynamic parameters of the robot during free swimming were discussed. Subsequently, the influences of the motion parameters of the swimming paddles on the velocity and propulsion efficiency of the robot were analyzed. According to the three-dimensional vortex structure, the hydrodynamic generation mechanism was revealed from the point of vortex dynamics. An experimental platform for the free-swimming mechanism of the crab-like robot was successfully established and comparison experiments to identify the differences between the synergic and alternate sculling gaits were conducted, verifying the accuracy of the numerical results.
crab-like robot; free swimming; synergic sculling gait; hydrodynamic; swimming paddle
2016-07-25.
日期:2017-05-26.
国家自然科学基金项目(51409058, 51305088);基础研究项目(B2420110014);黑龙江省博士后基金项目(LBH-Z15035);黑龙江省自然科学基金项目(E2016017, F201205).
王刚(1983-), 男, 讲师,博士.
王刚, E-mail:wanggang@hrbeu.edu.cn.
10.11990/jheu.201607068
TP242.6
A
1006-7043(2017)07-1072-07
网络出版地址:http://www.cnki.net/kcms/detail/23.1390.u.20170526.1838.008.html
