大豆高速精密播种机凸勺排种器设计与试验
2017-08-31陈玉龙贾洪雷王佳旭赵佳乐
陈玉龙 贾洪雷,2 王佳旭 王 奇 赵佳乐,2 胡 斌
(1.吉林大学生物与农业工程学院, 长春 130025; 2.吉林大学工程仿生教育部重点实验室, 长春 130025;3.石河子大学机械电气工程学院, 石河子 832003)
大豆高速精密播种机凸勺排种器设计与试验
陈玉龙1贾洪雷1,2王佳旭1王 奇1赵佳乐1,2胡 斌3
(1.吉林大学生物与农业工程学院, 长春 130025; 2.吉林大学工程仿生教育部重点实验室, 长春 130025;3.石河子大学机械电气工程学院, 石河子 832003)
为满足大豆高速精密播种作业要求,设计一种凸勺排种器,阐述了其基本结构和工作原理,利用数值计算方法对其主要部件进行结构设计。利用离散元软件EDEM进行仿真试验,通过单因素试验确定凸勺半径和凸勺倾角的较优取值范围,并且对凸勺边缘结构进行优化试验,发现当凸勺边缘为两侧倾斜时排种性能较优;设计二次正交旋转组合试验,运用Design-Expert 8.0软件进行试验数据处理,建立凸勺半径、凸勺倾角与合格率和漏播率之间的回归模型,获得最优参数组合为凸勺半径6.8 mm,凸勺倾角-9.4°,凸勺厚度2.2 mm,型孔长度14.1 mm,此时合格率达到95.1%,漏播率为0.6%。台架试验结果与仿真结果一致,播种机前进速度在6~12 km/h时,合格率高于93%,漏播率低于3%,满足播种机高速精密作业要求。
大豆排种器; 凸勺; 离散元法
引言
大豆播种机排种器从原理上主要分为机械式和气力式,气力式排种器结构较机械式排种器更为复杂,价格昂贵,机械式排种器在国内仍然被广泛使用。高速化和精量化是现代农业发展的一个重要方向,高速播种作业的工作速度要求达到10 km/h或更高[1-4],由于大豆的株距较小,现有的机械式大豆播种机很难满足高速作业要求[5-7],因此研制一种满足高速作业要求的机械式大豆排种器具有很大的应用价值。
研究人员对机械式排种器的高速化进行了大量研究,王业成等[8]设计摩擦式排种器,通过内外摩擦环增大种群摩擦力,提高排种器极限转速;刘宏新等[3,9]结合立式圆盘排种器和内窝孔式排种器,设计了具有复合充填力的立式浅盆型排种器,提高了排种盘的有效转速;史嵩等[4]设计机械气力组合式排种器,在内窝孔式排种器上利用正压充种,适应高速作业要求。
离散元法在19世纪70年代被提出,最初用于分析岩土的运动和力学行为[10-12],近年来在排种器的研究上得到广泛应用[13],缩短了设计周期,可以观察排种器内种子的运动过程[14-16],为排种机理的研究和排种器的设计提供了新方法[17-20]。
本文设计一种凸勺排种器,利用离散元软件进行仿真试验,确定影响排种性能的主要因素及最优参数组合,并利用台架试验进行验证。
1 排种器结构与工作原理
凸勺排种器结构如图1a所示,主要由排种盘、中间隔板、导种轮、排种轴、法兰和壳体组成,其中排种盘、导种轮和主轴固接在一起,在外力驱动下转动;中间隔板夹在排种盘和导种轮之间,并且固接在壳体上。与传统的垂直圆盘排种盘不同,该排种器的凸勺作为取种的功能结构,突出在排种盘外侧,在取种时,种子沿排种盘切向进入凸勺。
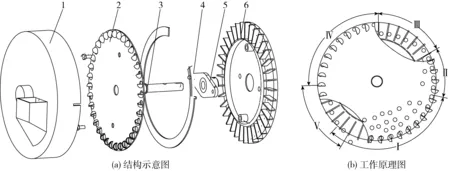
图1 凸勺排种器结构图Fig.1 Spoon precision seed metering device1.壳体 2.排种盘 3.排种轴 4.隔板 5.法兰 6.导种轮 Ⅰ.充种区 Ⅱ.清种区 Ⅲ.递种区 Ⅳ.携种区 Ⅴ.投种区
排种器工作过程主要分为充种、清种、递种、携种和投种5个阶段,如图1b所示。工作时,种子经壳体下面的进种口限量地进入排种器内的种子室,机具行走轮通过链、万向轴或其他传动装置将动力传至排种轴,排种盘和导种轮跟随排种轴同步转动,排种盘上的凸勺在转过种子群时,种子在排种盘旋转搅动作用下分种,形成速度不等圆周种子层,在籽粒自身重力、籽粒间碰撞摩擦力及凸勺支持力共同作用下进入凸勺内,完成充种过程;当凸勺携带种子离开种子群时,由于力系方向变化,使悬于勺口多余种子在重力作用下滑落,只留下凸勺内的一颗种子,完成清种;凸勺内种子继续向上转动,当来到隔板的递种口处时,种子发生轴向侧充,通过隔板上的递种口落入与凸勺对应的导种轮上的携种孔内,这一阶段为递种,导种轮与排种盘同步转动,直到转动至下方投种口,这一阶段为携种;在投种口处,种子在重力和离心力的作用下,脱离排种器落入种床内,完成投种,实现精量播种作业。
传统的型孔式排种器充种方向如图2a所示,型孔的开口方向沿排种盘径向,种子充种运动速度VS1的方向与型孔开口方向一致,沿径向充种,而型孔的转动速度VP1的方向沿排种盘切向,导致排种器的最大转速受种子充种极限速度的限制[21]。本文设计的凸勺排种器的凸勺开口方向沿排种盘切向,如图2b所示,种子充种运动VS2的方向与型孔开口方向一致,沿切向充种,型孔的转动速度VP2的方向同样沿排种盘切向,充种时间与排种器转速成反比,当排种器转速增大时,充种时间减小,高速时仍能顺利充种,充种时间不会限制排种器转速,因此凸勺排种器能够适应高速作业。
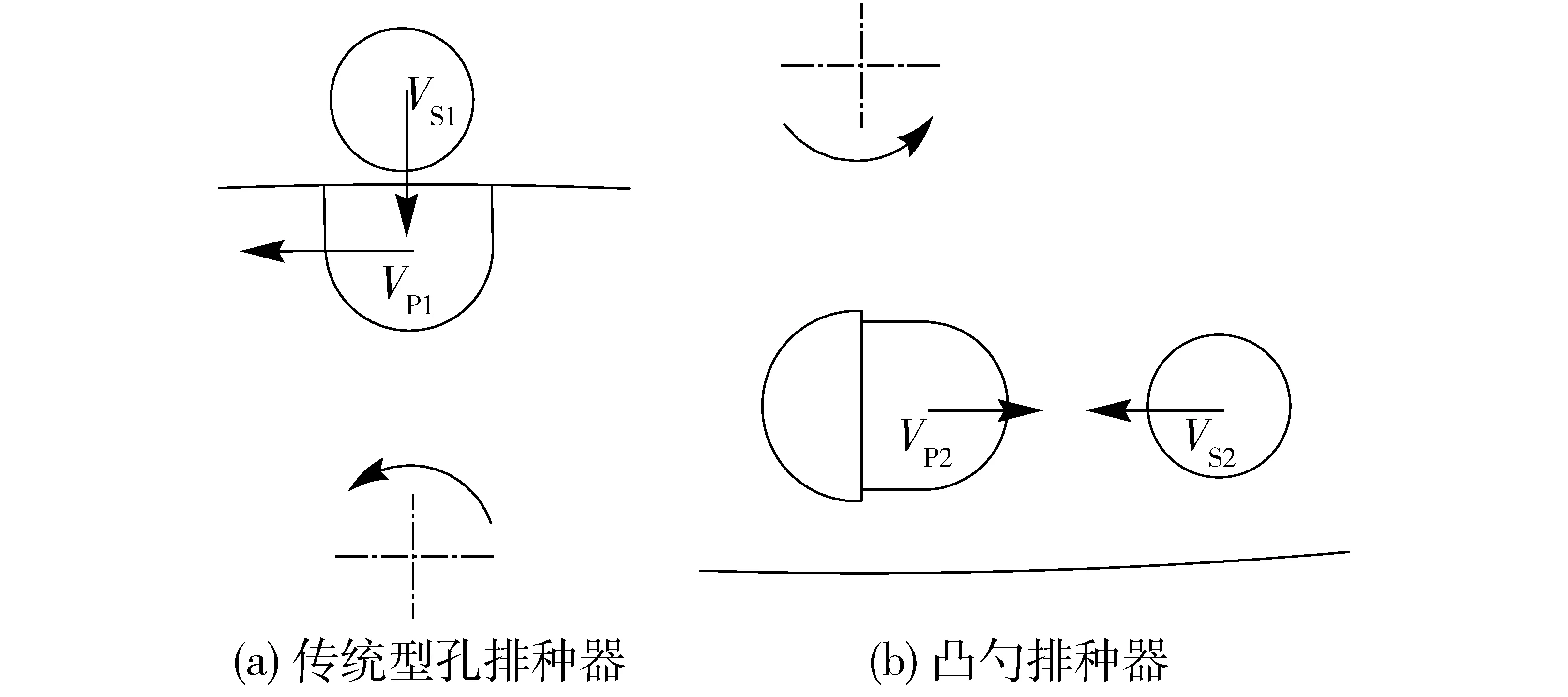
图2 充种方向示意图Fig.2 Diagrams of filling direction
2 关键部件结构设计
2.1 排种盘
排种盘完成排种器工作过程中的取种、清种和部分递种作业,是排种器的核心部件,排种盘的结构设计对排种器的工作性能具有重要影响。
排种盘的结构如图3所示,凸勺均匀分布在排种盘的边缘,排种盘上凸勺内侧开有型孔,型孔宽度等于凸勺内直径,充种时,种子进入由凸勺和型孔组成的容种空间内。
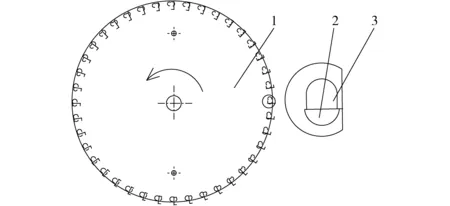
图3 排种盘结构示意图Fig.3 Structure diagram of seed plate 1.圆盘 2.凸勺 3.型孔
2.1.1 凸勺结构尺寸
为了顺利完成取种,种子必须能够完全进入容种空间内,如图4a所示,凸勺半径R应不小于dmax(最大种子直径),凸勺上边缘到型孔上边缘距离L2应不小于dmax。为了避免重播,当种子进入容种空间后,必须能够及时清除多余种子,只留下1颗,并且保证不会堵塞凸勺,若凸勺的总厚度L1过大,如图4b所示,在第1颗种子进入容种空间之后,第2颗种子超过一半进入凸勺,则出现重播的几率较大。当R=dmax时,如图4c所示,L1最小接近于零,型孔长度L3最小接近dmax。若L3过大,在第1颗种子进入容种空间后,第2颗种子继续进入凸勺,造成重播,如图4d所示,因此必须保证2颗种子不能同时进入型孔,当R=0.5dmax,L1=0.5dmax时,L2和L3达到最大值。

图4 凸勺尺寸示意图Fig.4 Diagrams of spoon dimension
所以,凸勺的尺寸应满足
(1)
2.1.2 凸勺分布
排种盘直径是一个重要的设计参数,在维持相同的前进速度时,直径越小所能分布的型孔越少,排种轴的转速越大;直径增大,则排种器结构增大、重量增加。根据设计经验,排种盘直径采用260 mm。
凸勺数目、转速与播种机前进速度的关系为
(2)
式中v——播种机前进速度,km/hz——株距,本文取10 cmn——排种轴转速,r/minm——凸勺数目
从式(2)可以看出,在保持相同的前进速度和株距的情况下,凸勺数目与排种轴转速成反比。在排种盘直径一定时,排种盘上分布的凸勺数目越大,排种轴转速越小,有利于充种。若凸勺数目过多,将会使相邻凸勺在充种时产生干涉,影响充种效果,因此必须确定顺利充种前提下凸勺的最小间距和最大数目。
图5 凸勺分布距离示意图Fig.5 Diagram of spoon distribution distance
l≥S+0.5dmax
(3)
(4)
(5)
式中l——凸勺间距v0——排种盘线速度ω——排种盘角速度D——排种盘直径
整理可得
(6)
从式(6)可以看出,型孔数目与排种盘直径成正比,与排种轴转速和种子粒径成反比。
当凸勺外壁与相邻型孔紧挨时,凸勺间距最小,凸勺数目最多,此时
(7)
(8)
整理得
(9)
v0t≤l
(10)
将式(4)代入式(10)得
(11)
在排种盘直径为260 mm,最大种子直径为8 mm时,由式(11)计算得转速最大为53.3 r/min。在凸勺半径为4、5、6、7、8 mm时,由式(9)计算得凸勺数目分别为44、42、41、41、41个,在播种机前进速度为10 km/h时,转速分别为37.9、39.7、40.7、40.7、40.7 r/min,小于53.3 r/min,满足设计要求。
2.1.3 凸勺倾角
当凸勺倾角发生变化时,对排种盘的取种及清种效果产生影响,规定凸勺中心线平行于排种盘切向时为0°,凸勺偏向排种盘中心时为正角度。当凸勺倾角为正时,如图6a所示,凸勺的清种效果优于0°,清种起始角降低,但是充种时由于存在正偏角,将不利于充种。当凸勺倾角为负时,如图6b所示,凸勺的充种效果优于0°,但是不利于清种,将增大清种起始角,具体的凸勺倾角需要通过试验获得。
图6 凸勺倾角示意图Fig.6 Diagrams of spoon inclination angle
2.2 隔板
凸勺内的种子通过隔板上的递种口进入导种轮,递种口的起始角决定了种子侧充的起始角,递种口的跨度决定能否顺利清种。为避免种子在种群中提前侧充形成重播,递种口应位于种群外,同时递种口起始角不宜过大,避免种子在侧充完成前进入清种区造成漏播。前期通过高速摄像进行试验,发现在10 km/h时种群倾角约为27°,如图7所示,倾角随着速度增加出现小幅增大。种群跨度约为130°,如图8所示,种群上边缘约为3°,因此递种口的起始角设为5°,终止角设为90°,递种口跨度85°,保证种子有足够的时间完成侧充。

图7 种群倾角Fig.7 Inclination angle of seed group
图8 隔板结构示意图Fig.8 Structure diagram of baffle plate
3 试验材料与方法
3.1 离散元仿真参数与模型构建
利用离散元仿真软件EDEM对排种器工作过程进行仿真,接触模型采用Hertz-Mindlin无滑动接触模型,全局变量参数设置如表1所示[20]。
在Solidworks中对排种器进行数字化建模,并简化排种器模型,如图9所示,将文件另存为.x_t格式,导入到EDEM中。
颗粒设为直径8 mm的圆球,仿真时间步长设置为1.32×10-5s,网格尺寸设置为2倍最小单元7.51 mm,仿真过程如图10所示。
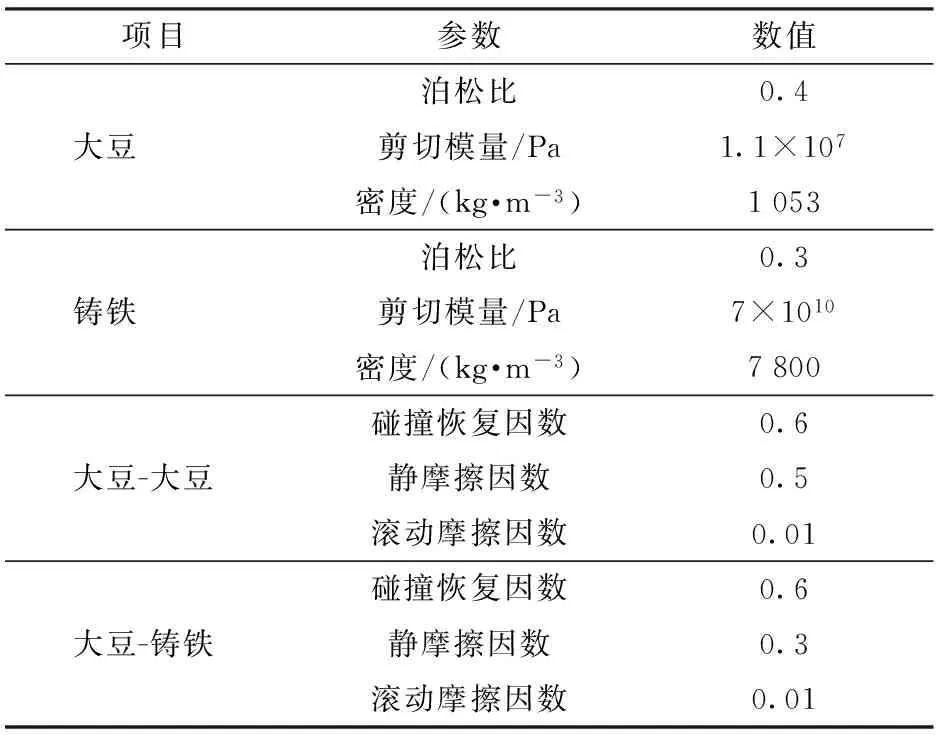
表1 仿真参数Tab.1 Parameters used in simulation
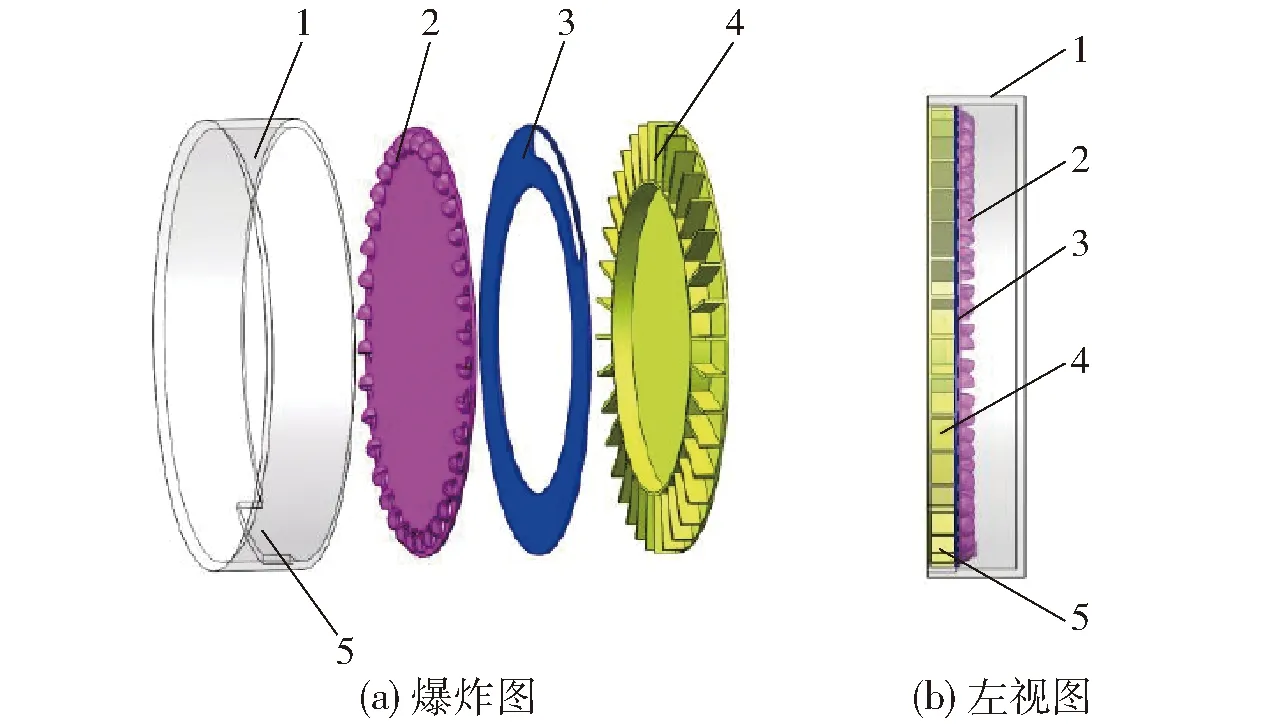
图9 仿真简化模型示意图Fig.9 Schematic of simplified simulation model1.壳体 2.排种盘 3.隔板 4.导种轮 5.投种口
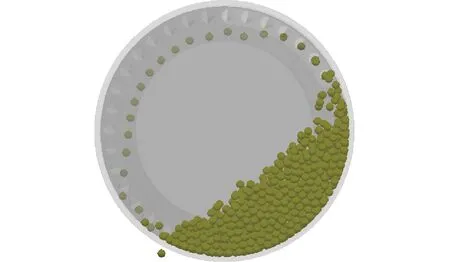
图10 排种器仿真过程Fig.10 Schematic of seed metering device in simulation
3.2 台架试验
台架试验在吉林大学农机实验室的JPS-12排种器性能测试系统上进行,用于验证离散元仿真结果。测试系统由排种器、传送带、高速摄像机、喷油装置、计算机、电控系统和2个调频电动机组成。排种器由电动机1通过链轮带动其转动,传送带由电动机2带动其运动,喷油装置将油喷在传送带上形成油带,排种器投出的种子落在传送带上,种子发生的位移较小,最大程度反映了排种器的排种性能。试验时,排种器固定而传送带转动,传送带的向后运动代替排种器的向前运动。
试验时首先启动电动机2,传送带运动,接着启动喷油装置,然后启动电动机1,待排种器运转1 min后停止,测量油带上种子分布,由于传送带长度有限,需重复上述步骤进行多次测量,共统计250颗种子,重复测量5次,取平均值。

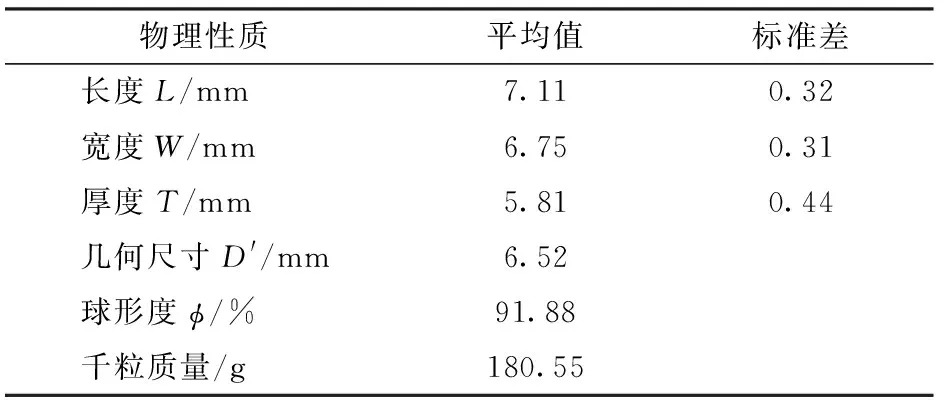
表2 大豆物理性质Tab.2 Physical properties of soybean
3.3 试验因素与指标
根据上述分析可知,凸勺半径和倾角是排种盘的主要设计参数,因此选取凸勺的半径和倾角作为试验因素。由式(1)计算凸勺及型孔的尺寸,如表3所示,倾角初选-20°、-10°、0°、10°、20°,进行单因素试验,确定较优取值范围,进行二次正交旋转组合试验。为满足高速作业要求,试验均在前进速度为10 km/h时进行。
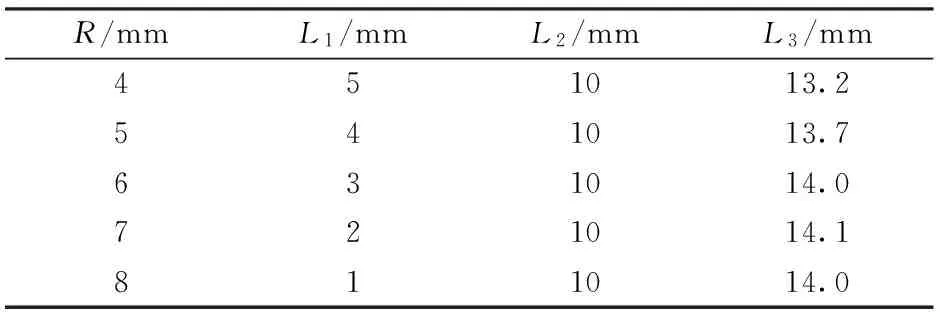
表3 凸勺及型孔尺寸Tab.3 Sizes of spoon and hole
GB/T 6973—2005《单粒(精密)播种机试验方法》,推荐采用合格率、重播率和漏播率作为排种器性能评价指标,而合格率、重播率与漏播率之和为100%,知道两项即可得出第3项,因此选取合格率与漏播率为试验指标。合格率与漏播率的确定需要通过对粒距的测量,而仿真试验中不易测定粒距,因此通过统计仿真试验中投种口投出的种子确定合格率与漏播率,当投出1颗种子时记为合格,没有种子投出时记为漏播,同时投出2颗或更多时记为重播。
4 试验结果与分析
4.1 凸勺半径仿真试验
以凸勺半径为因素进行单因素仿真试验,此时凸勺倾角设定为0°,试验结果如表4所示。
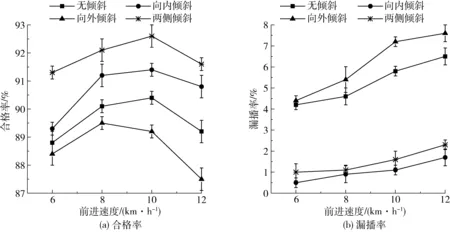
图12 凸勺边缘形状对试验指标的影响曲线Fig.12 Effect curves of edge shapes on experimental index

凸勺半径/mm型孔数目转速/(r·min-1)合格率/%漏播率/%44437.980.9±0.9c16.6±0.5a54239.786.1±1.0b9.6±0.6b64140.790.7±1.1a5.8±0.3c74140.788.9±1.1ab5.1±0.2c84140.785.4±0.9b4.6±0.2c
注:同一列中不同字母表示差异显著(P<0.05)。
由表4可知,凸勺半径对合格率和漏播率影响显著,合格率随着凸勺半径的增加先增大后减小,漏播率随凸勺半径的增大而减小,并且减小趋势逐渐减弱。当凸勺半径增大时,取种的有效面积增大,成功取种几率增大,因此漏播率减小,在凸勺半径从4 mm增大到6 mm时,合格率逐渐升高,当凸勺半径大于6 mm时,取多粒种子的情况增多,导致合格率降低。
表4中的试验结果并不理想,在凸勺半径为6 mm时,合格率最高为90.7%;漏播率随着凸勺半径的增加而降低,在凸勺半径为8 mm时漏播率最低(4.6%)。
观察仿真过程发现,部分种子在离开种群时处于凸勺边缘的平面上,未能进入凸勺,在清种时落入种群,造成漏播,因此对凸勺边缘进行优化,将凸勺边缘由无倾斜改为向外倾斜、向内倾斜和两侧倾斜,如图11所示。在凸勺半径为6 mm时进行仿真试验,前进速度分别取6、8、10、12 km/h,对应的排种轴转速分别为24.4、32.6、40.7、48.8 r/min,结果如图12所示。从图12a中可以看出,4种不同的凸勺边缘结构对应的合格率均随着前进速度的增加先提高后下降,在8~10 km/h内合格率较高,凸勺边缘两侧倾斜时,合格率高于其他组;从图12b中可以看出,4种凸勺边缘结构对应的漏播率均随着前进速度的增加而增大,凸勺边缘不倾斜与向外倾斜时漏播率接近,凸勺边缘向内倾斜与两侧倾斜时漏播率接近且明显小于其他两组。
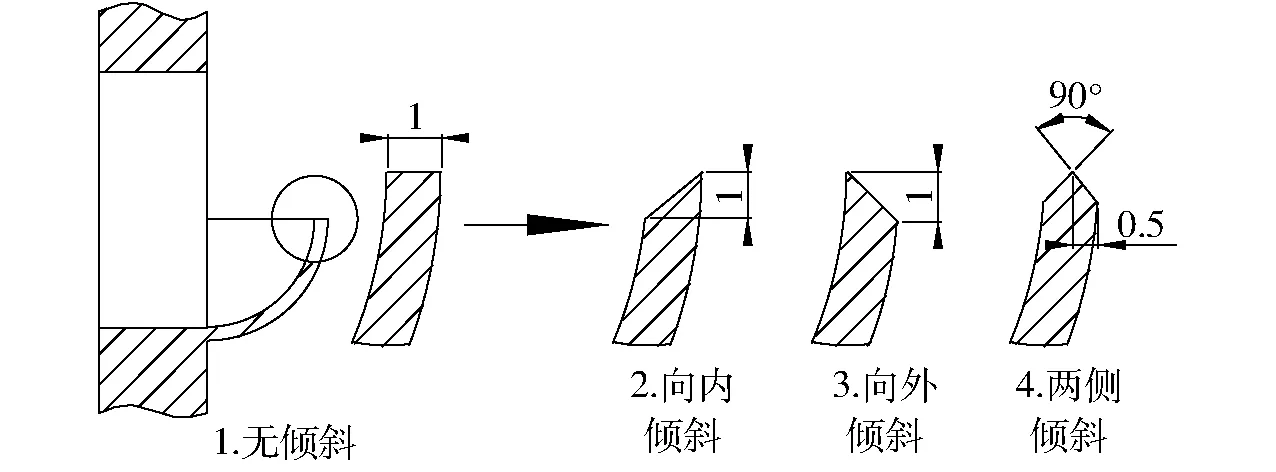
图11 凸勺边缘形状示意图Fig.11 Schematic of spoon edge shapes
当凸勺边缘向内倾斜时,增加了种子进入凸勺内的机会,降低了漏播率,同时提高了重播率,当凸勺倾角向外倾斜时,增大了种子落回种群的机会,降低了重播率,但增大了漏播率,综合考虑合格率与漏播率,凸勺边缘两侧倾斜时排种性能最佳,因此凸勺边缘设为两侧倾斜进行后续试验。
在凸勺边缘两侧倾斜时,重复凸勺半径单因素仿真试验,并与表4中试验结果进行对比,结果如图13所示,在凸勺半径4~8 mm范围内,凸勺边缘为两侧倾斜的合格率均大于优化前,漏播率均小于优化前,凸勺边缘的优化对排种器性能有显著提高。
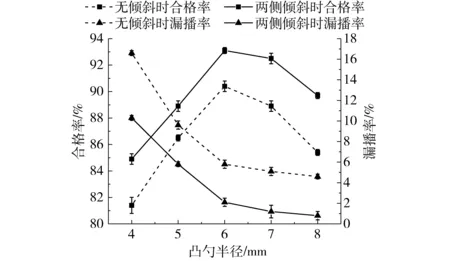
图13 不同凸勺半径下凸勺边缘形状对试验指标的影响曲线Fig.13 Effect curves of edge shapes on experimental index at different spoon radii
对图13中的凸勺边缘为两侧倾斜时的试验结果进行回归建模,得
(12)
(13)
式中Y1——合格率,%Y2——漏播率,%X1——凸勺半径,mm
合格率Y1随着凸勺半径的增加先提高后降低,在6.4 mm附近达到最大值92.4%。利用回归方程(12)求出合格率大于90%时的凸勺半径的取值范围为5.1~7.7 mm。
漏播率Y2随着凸勺半径的增加而逐渐降低,利用回归方程(13)求出漏播率小于5%时的凸勺半径,大于5.0 mm。
4.2 凸勺倾角仿真试验
以凸勺倾角为因素进行单因素仿真试验,设定凸勺半径R为6 mm,型孔长度L3为14 mm,凸勺厚度取3 mm,试验结果如图14所示。
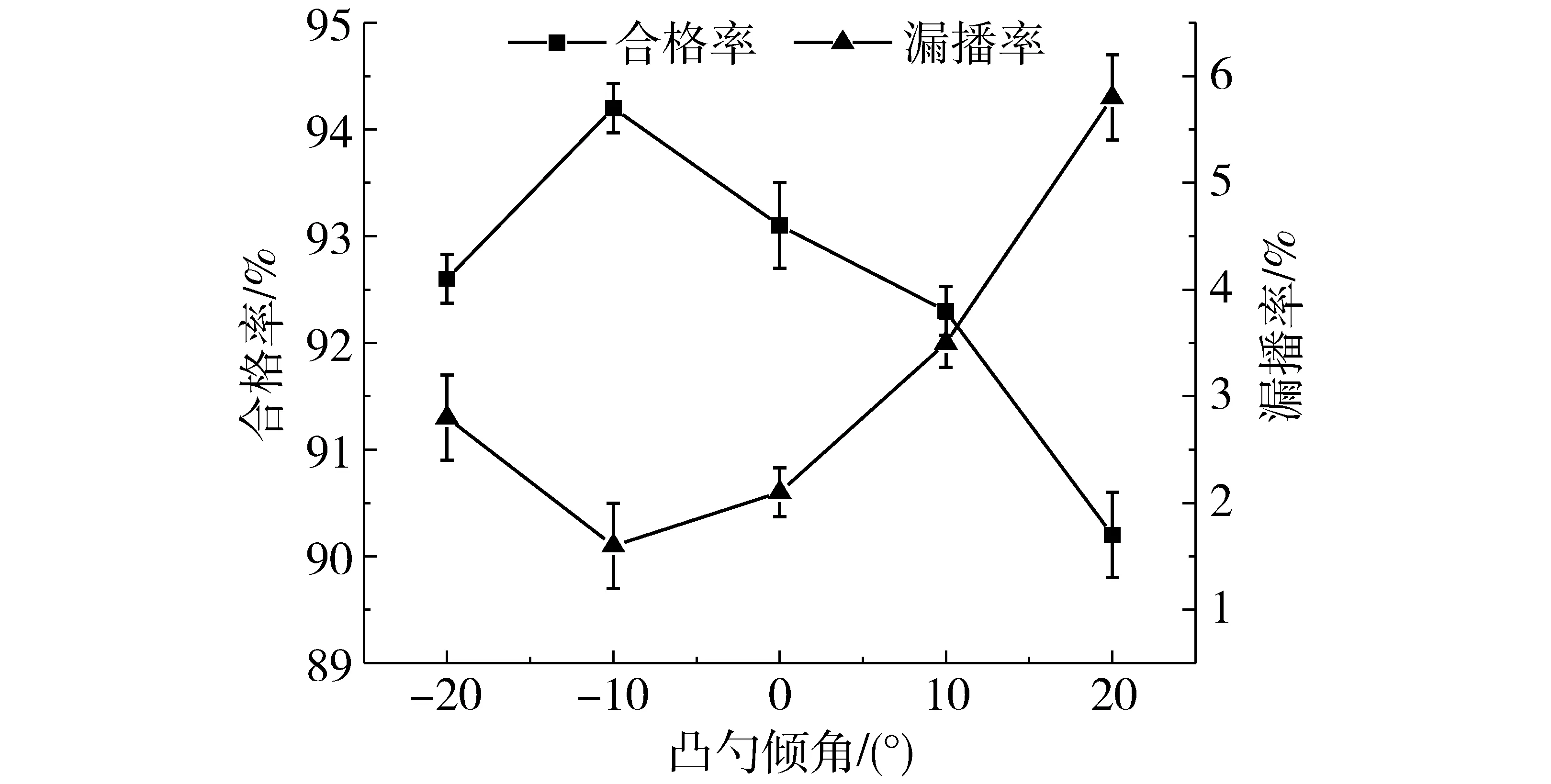
图14 凸勺倾角对试验指标的影响曲线Fig.14 Effect curves of hole inclination angle on experimental index
合格率随着凸勺倾角的增加先增大后减小,在-10°附近达到最大(94.2%)。漏播率随着凸勺倾角的增加先减小后增大,在-10°附近达到最小值(1.6%)。当凸勺倾角为负角度时,凸勺进入种群的角度与种群的贴合度较好,利于提高凸勺在进入种群的瞬间取种的成功率,但是当凸勺离开种群时,不利于清种,会增大重播的几率;当凸勺为正角度时,凸勺清种的效果较好,减少重播现象的发生,同时造成漏播率的增大。
对图14中的试验结果进行回归建模,得
(14)
(15)
式中X2——凸勺倾角,(°)
通过回归方程(14)求出合格率大于93%时的凸勺倾角的取值范围为-18.1°~4.8°,在凸勺倾角为-6.6°时合格率最大,为93.6%。通过回归方程(15)求出漏播率小于3%时,凸勺倾角的取值范围为-22.0°~7.9°,在凸勺倾角为-7.1°时漏播率最小,为1.8%。
4.3 二次正交旋转仿真试验
以凸勺半径和凸勺倾角为因素,采用二因素五水平二次正交旋转组合设计方法安排试验[22-23],依据单因素试验结果,凸勺半径取值上下限分别为5.1、7.7 mm,凸勺倾角的取值上下限分别为-18.1°、4.8°,各因素水平编码如表5所示。

表5 试验因素编码Tab.5 Experiment factors codes
对表6中试验结果进行回归分析,获得回归模型为
8.39X1+0.13X2+69.53
(16)
0.03X1X2-10.69X1-0.15X2+39.68
(17)
对上述二次回归模型进行方差分析和回归系数显著性检验,结果如表7所示。

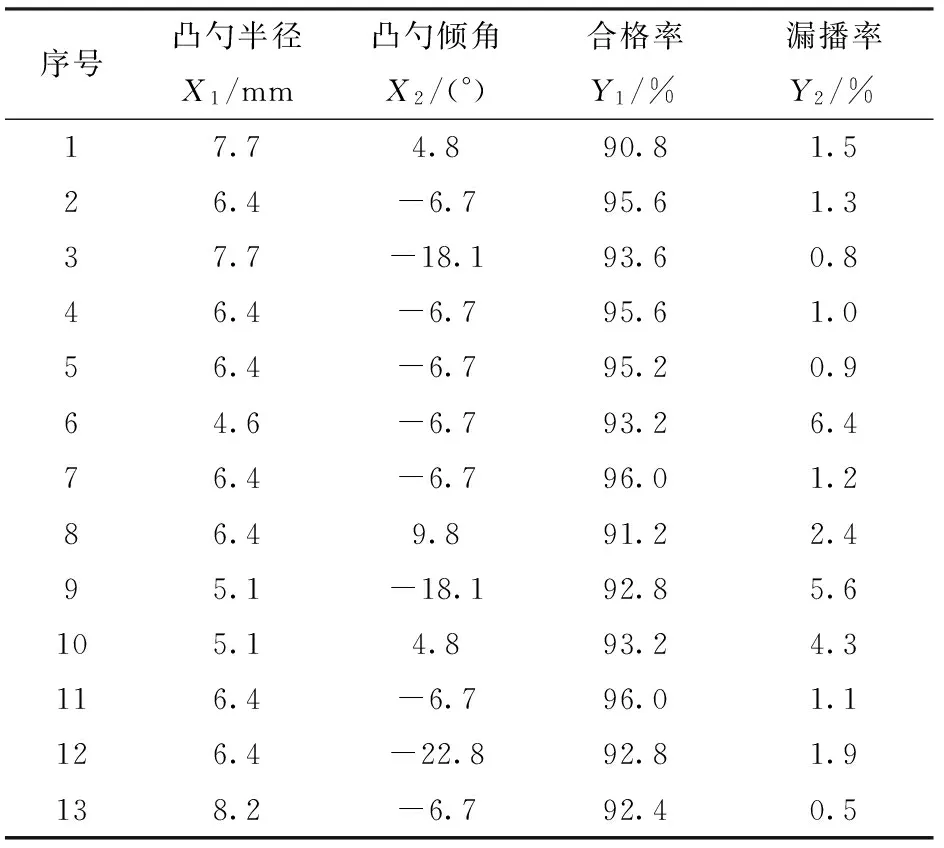
表6 回归正交旋转试验安排与结果Tab.6 Results of quadratic regression orthogonal rotating experiment

表7 回归方程方差分析Tab.7 Variance analysis of regression equation

通过Design-Expert 8.0软件得到凸勺半径与凸勺倾角对合格率和漏播率影响的响应曲面图,如图15所示,随着凸勺半径的增大和凸勺倾角的增加,合格率呈先增大后减小的趋势。当凸勺倾角固定时,随着凸勺半径的增大,凸勺取种能力增强,在开始阶段合格率升高,但随着凸勺半径的继续增加,重播现象开始增加,导致合格率下降,在凸勺半径增大的整个过程中漏播率持续降低;当凸勺半径固定时,随着凸勺倾角增大,凸勺的取种能力逐渐降低,清种能力逐渐增强,重播率减小,漏播率增加,合格率呈现先升高后下降的趋势。
利用Design-Expert 8.0软件,以合格率最大、漏播率最小为条件进行寻优处理,得到X1最优值为6.8 mm,X2最优值为-9.4°,即当凸勺半径取6.8 mm,凸勺倾角取-9.4°时,此时合格率为95.1%,漏播率为0.6%。通过计算,此时凸勺厚度为2.2 mm,型孔长度为14.1 mm。
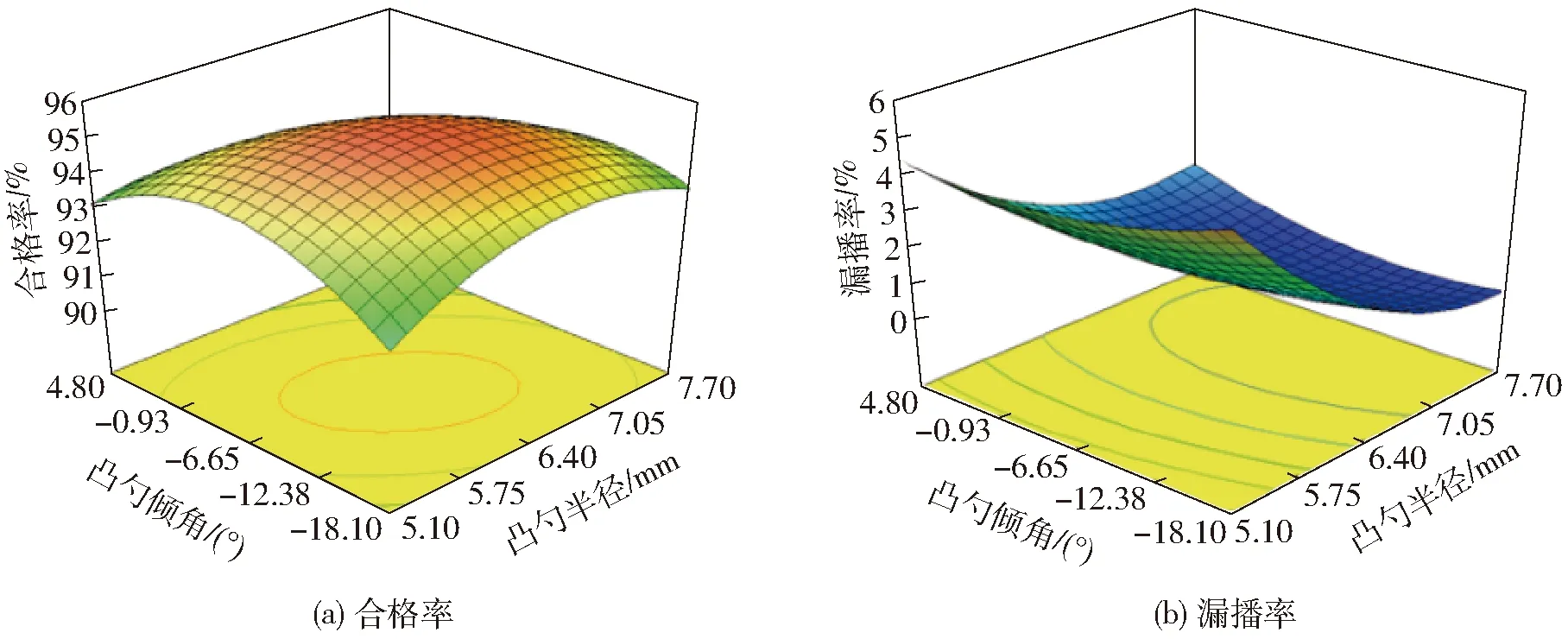
图15 响应曲面图Fig.15 Response surface plots
4.4 台架验证试验
根据仿真试验获得的最优参数组合设计加工物理样机(图16),进行台架试验,考核在前进速度分别为6、8、10、12、14 km/h时排种器的排种性能稳定性,结果如图17所示。
物理样机试验结果与仿真试验整体趋势一致。在前进速度10 km/h时,仿真试验合格率95.0%,漏播率1.2%,物理样机试验合格率94.2%,漏播率1.5%,与通过回归模型得到的数据接近。

图16 台架试验Fig.16 Platform experiment
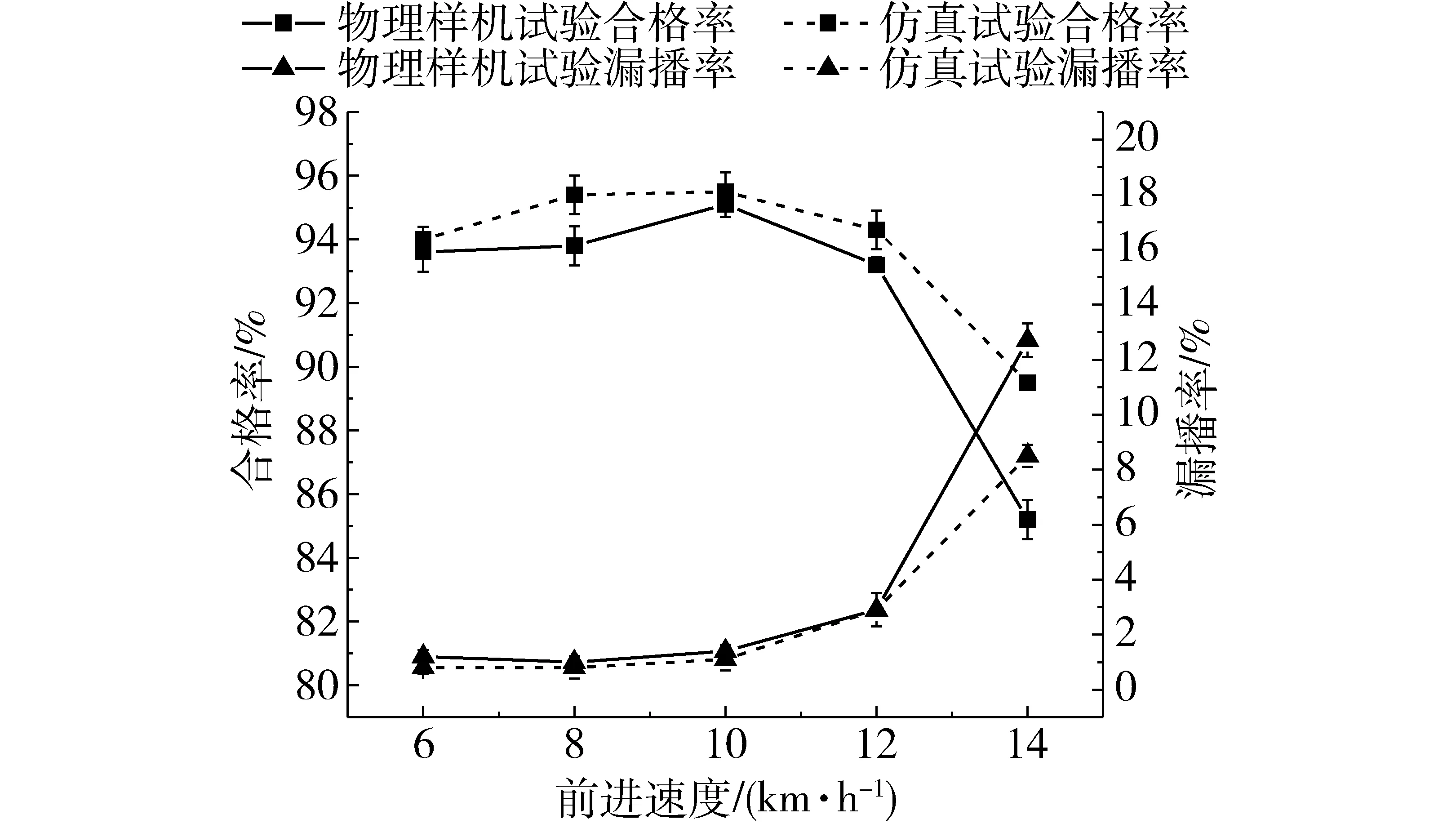
图17 验证试验结果Fig.17 Resutls of verification experiment
在播种机前进速度低于12 km/h时,合格率与漏播率的波动较小,台架试验的合格率略低于仿真试验,漏播率略高于仿真试验,台架试验的合格率高于93%,漏播率低于3%。当前进速度大于12 km/h时,合格率与漏播率均出现剧烈波动,合格率大幅降低,漏播率大幅升高,并且台架试验与仿真试验的结果差异变大,当速度达到14 km/h时,台架试验的合格率低于80%,漏播率大于18%,观察试验过程发现,在速度为14 km/h时种群内的种子运动非常剧烈,种群的离散程度加大,不利于种子的充填。
5 结论
(1)从理论上对排种盘和隔板进行结构分析和设计,排种盘直径为260 mm,凸勺半径取4、5、6、7、8 mm时,凸勺数分别为44、42、41、41、41个,隔板上递种口起始角为5°、终止角为90°,满足充种要求,分析表明排种器的排种性能与凸勺半径、倾角等因素有关。
(2)离散元仿真试验结果表明:凸勺边缘向两侧同时倾斜时排种性能最优,凸勺半径和凸勺倾角对排种性能有显著影响,且存在交互作用;合格率随着凸勺半径的增加先增大后减小,随着凸勺倾角的增加先增大后减小,漏播率随着凸勺半径的增大而减小,随着凸勺倾角的增大先增加后减小;通过回归模型求得排种盘最佳设计参数为凸勺半径6.8 mm,凸勺倾角-9.4°,凸勺厚度2.2 mm,型孔长度14.1 mm,对应的合格率为95.1%,漏播率为0.6%。
(3)物理样机的台架试验表明,仿真试验结果与物理试验基本一致,当前进速度为6~12 km/h时,排种器合格率高于93%,漏播率低于3%,满足播种机高速精密作业要求。
1 尚强民. 如何看待中国粮食进口量超亿吨[J]. 中国粮食经济, 2015(3): 32-35.
2 姚巧倩, 曹宝明. 中国大豆进出口量与大豆价格关系的分析[J]. 滁州学院学报, 2015,17(1): 32-35. YAO Qiaoqian, CAO Baoming. Research on the price of soybean affected by its volumes of China’s export and import[J]. Journal of Chuzhou University,2015,17(1):32-35. (in Chinese)
3 刘宏新, 徐晓萌, 郭丽峰,等. 具有复合充填力的立式浅盆型排种器充种机理[J]. 农业工程学报, 2014,30(21): 9-16. LIU Hongxin, XU Xiaomeng, GUO Lifeng,et al. Research on seed-filling mechanism of vertical shallow basin type seed-metering device with composite filling force [J].Transactions of the CSAE, 2014,30(21):9-16.(in Chinese)
4 史嵩, 张东兴, 杨丽,等. 气压组合孔式玉米精量排种器设计与试验[J]. 农业工程学报, 2014,30(5):10-18. SHI Song, ZHANG Dongxing, YANG Li,et al. Design and experiment of pneumatic maize precision seed-metering device with combined holes [J].Transactions of the CSAE, 2014,30(5):10-18.(in Chinese)
5 PARISH R L, MCCOY J E, BRACY R P. Belt-type seeder for soybeans[J]. Applied Engineering in Agriculture, 1999,15 (2): 103-106.
6 贾洪雷, 赵佳乐, 郭明卓,等. 双凹面摇杆式排种器设计与性能试验[J/OL]. 农业机械学报, 2015,46(1): 60-65.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20150109&flag=1.DOI:10.6041/j.issn.1000-1298.2015.01.009. JIA Honglei, ZHAO Jiale, GUO Mingzhuo,et al. Design and performance experiment on double-concave surface rocker type seed metering device [J/OL].Transactions of the Chinese Society for Agricultural Machinery, 2015,46(1): 60-65.(in Chinese)
7 JIA H L, ZHAO J L, JIANG X M,et al. Design and optimization of a double-concave rocker seedmeter for precision seeding[J]. Ama-Agricultural Mechanization in Asia Africa and Latin America, 2015,46(2): 29-34.
8 王业成, 邱立春, 张文娇,等. 摩擦型立式圆盘精密排种器的设计与试验[J]. 农业工程学报, 2012,28(1): 22-26. WANG Yecheng, QIU Lichun, ZHANG Wenjiao,et al. Design and experiment of friction vertical plate precision seed-metering device [J].Transactions of the CSAE, 2012,28(1):22-26.(in Chinese)
9 刘宏新, 王福林. 立式圆盘排种器工作过程的高速影像分析[J]. 农业机械学报, 2008,39(4):60-64. LIU Hongxin, WANG Fulin. Study on high-speed image of working principle of vertical plate seed-metering device [J].Transactions of the Chinese Society for Agricultural Machinery, 2008,39(4):60-64.(in Chinese)
10 CUNDALL P A, STRACK O D. A discrete numerical model for granular assemblies[J]. Géotechnique, 1979,29 (1): 47-65.
11 CUNDALL P A. Formulation of a three-dimensional distinct element model—Part I. A scheme to detect and represent contacts in a system composed of many polyhedral blocks[J]. International Journal of Rock Mechanics and Mining Sciences & Geomechanics Abstracts, 1988,25(3): 107-116.
12 MOLLON G, RICHEFEU V, VILLARD P,et al. Discrete modelling of rock avalanches: sensitivity to block and slope geometries[J]. Granular Matter, 2015,17(5): 645-666.
13 马征, 李耀明, 徐立章. 农业工程领域颗粒运动研究综述[J/OL]. 农业机械学报, 2013,44(2):22-29.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20130205&flag=1.DOI:10.6041/j.issn.1000-1298.2013.02.005. MA Zheng, LI Yaoming, XU Lizhang. Summarize of particle movements research in agricultural engineering realm [J/OL].Transactions of the Chinese Society for Agricultural Machinery, 2013,44(2):22-29.(in Chinese)
14 ZHOU H B, CHEN Y, SADEK M A. Modelling of soil-seed contact using the Discrete Element Method (DEM)[J]. Biosystems Engineering, 2014,121: 56-66.
15 ZHAO Z, WU Y F, YIN J J,et al. Monitoring method of rice seeds mass in vibrating tray for vacuum-panel precision seeder[J]. Computers and Electronics in Agriculture, 2015,114: 25-31.
16 KHATCHATOURIAN O A, BINELO M O, LIMA R F. Simulation of soya bean flow in mixed-flow dryers using DEM[J]. Biosystems Engineering, 2014,123: 68-76.
17 LI Z Q, YU J Q, FENG Z R,et al. Simulation and performance analysis of a soybean seed metering device using discrete element method[J]. Sensor Letters, 2013,11(6-7): 1217-1222.
18 石林榕, 吴建民, 孙伟,等. 基于离散单元法的水平圆盘式精量排种器排种仿真试验[J]. 农业工程学报, 2014,30(8):40-48. SHI Linrong, WU Jianmin, SUN Wei,et al. Simulation test for metering process of horizontal disc precision metering device based on discrete element method [J].Transactions of the CSAE, 2014,30(8):40-48.(in Chinese)
19 胡建平, 周春健, 侯冲,等. 磁吸板式排种器充种性能离散元仿真[J/OL]. 农业机械学报, 2014,45(2):94-98.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20140216&flag=1.DOI:10.6041/j.issn.1000-1298.2014.02.016. HU Jianping, ZHOU Chunjian, HOU Chong,et al. Simulation analysis of seed-filling performance of magnetic plate seed-metering device by discrete element method [J/OL].Transactions of the Chinese Society for Agricultural Machinery, 2014,45(2):94-98.(in Chinese)
20 LIU H X, GUO L F, FU L L,et al. Study on multi-size seed-metering device for vertical plate soybean precision planter[J]. International Journal of Agricultural & Biological Engineering, 2015,8(1): 1-8.
21 张泽平, 马成林, 左春柽. 精密排种器及排种理论研究进展[J].吉林工业大学学报,1995,25(4):112-117.
22 GAO G H, FENG T X, YANG H,et al. Development and optimization of end-effector for extracton of potted anthurium seedings during transplanting[J]. Applied Engineering in Agriculture, 2016,32(1): 37-46.
23 YAZGI A, DEGIRMENCIOGLU A. Optimisation of the seed spacing uniformity performance of a vacuum-type precision seeder using response surface methodology[J]. Biosystems Engineering, 2007,97(3): 347-356.
Design and Experiment of Scoop Metering Device for Soybean High-speed and Precision Seeder
CHEN Yulong1JIA Honglei1,2WANG Jiaxu1WANG Qi1ZHAO Jiale1,2HU Bin3
(1.CollegeofBiologicalandAgriculturalEngineering,JilinUniversity,Changchun130025,China2.KeyLaboratoryofBionicEngineering,MinistryofEducation,JilinUniversity,Changchun130025,China3.CollegeofMechanicalandElectricalEngineering,ShiheziUniversity,Shihezi832003,China)
In order to meet the requirement of high-speed and precision sowing operation of soybean, a spoon seed metering device was proposed, and its basic structure and working principle were analyzed. The numerical calculation method was used to design the plate and partition of the seed metering device. The diameter of the plate was designed as 260 mm, the number and radius of spoon were inversely proportional, and the angle of the mouth on the partition was from 5° to 90°. The optimal ranges of the radius and the inclination angle of the scoop were determined by single factor tests, which were obtained through simulation experiment by EDEM. The structure of the scoop edge was optimized through simulation experiment, and the optimal seeding performance was obtained when the scoop edge was inclined to both sides. The quadratic orthogonal rotation combination test was designed and the experimental data was processed by the Design-Expert 8.0 software. The regression model was established for the radius and inclination angle of the spoon about the qualified index and missing index. The optimal parameters of the scoop were radius of 6.8 mm, inclination angle of -9.4°, thickness of 2.2 mm and length of 14.1 mm, with the qualified index of 95.1% and the missing index of 0.6%. The physical prototype was processed according to the optimal parameters and the bench test was carried out with results in accordance with simulation tests. The qualified index of the seeder was above 93% and the missing index was less than 3% when the speed of the planter was in the range of 6 km/h to 12 km/h, which satisfied the requirement of high-speed and precision sowing.
soybean seed metering device; scoop; discrete element method
10.6041/j.issn.1000-1298.2017.08.010
2016-12-05
2017-02-21
“十二五”国家科技支撑计划项目(2014BAD06B03)和国家自然科学基金项目(51665050)
陈玉龙(1991—),男,博士生,主要从事保护性耕作及其智能装备研究,E-mail: 17743125073@163.com
贾洪雷(1957—),男,教授,博士生导师,主要从事保护性耕作及其智能装备研究,E-mail: jiahl@vip.163.com
S233.2+3
A
1000-1298(2017)08-0095-10