40 m天线换馈机构结构设计及有限元分析*
2017-08-29李燕
李 燕
(中国电子科技集团公司第三十九研究所, 陕西 西安 710065)
40 m天线换馈机构结构设计及有限元分析*
李 燕
(中国电子科技集团公司第三十九研究所, 陕西 西安 710065)
文中根据某40 m天线实际工程需要设计了一种新型换馈机构。该换馈机构结构简单,易于操作,在换馈驱动单元驱动下,馈源绕旋转轴旋转实现换馈。在换馈机构工作过程中,工况复杂多变。由于换馈角度较小,时间要求相对较长,馈源摆动角速度和角加速度都非常小,因此可以用静力学方法对其进行研究。利用ANSYS对该换馈机构进行结构建模、计算和分析,得出在多种复杂工况下,该换馈机构能够满足馈源对其结构强度和刚度的要求。该换馈机构可使天线的制造成本降低,使用率提高。
换馈机构;结构设计;ANSYS
引 言
随着探月工程以及其他天文观测的逐步实施和深入,对与之相关的天线的要求也越来越高,所需要的天线工作频段也越来越广[1]。为了节省成本,对于同一台天线,常常需要设计多套馈电系统来满足探月工程中多频段信号接收和发射的需求。因此为了满足这一需求,需要设计相应的馈源或副面切换机构来实现换馈功能。
目前,普遍使用的有人工换馈法、旋转换馈法、副面转换法。其中,人工换馈法是将馈源摆放在一定的位置,在需要更换馈源时,由人工实现换馈。该种换馈方法花费时间长,且需要较大的人力投入,自动化水平低,换馈极不方便。旋转换馈法是将馈源摆放在一定的轨道上,设计馈源推升机构,将需要的馈源推升至需要的位置。该种换馈方法自动化水平有所提高,但是需要较大的馈源支套空间来放置多个馈源以及换馈机构。副面转换法是将馈源固定不动,切换副面至与相应馈源匹配的位置,实现换馈功能。该种换馈方法对副面撑调机构的结构刚度要求较高。因此,在实际工程项目中,应根据实际需求,选取或设计合适的换馈方式来实现换馈。
某40 m天线已经使用多年,以上几种换馈方式不能在现有基础上扩展天线工作频段同时又保证天线主面精度。因此,本文设计出一种新型换馈机构——钟摆式换馈机构(如图1所示)来满足该工程的实际需要。该天线原有S/X波段馈源,现扩展为S/X波段、C波段和Ku波段3套馈源,将3套馈源布置在垂直于天线俯仰轴的平面内,通过绕垂直于该平面的一旋转轴(平行于天线俯仰轴)做钟摆式运动,实现换馈。根据各馈源尺寸关系,将3套馈源相心设计在同一个圆弧上,且S/X馈源轴线和天线主面轴线重合,C馈源和Ku馈源分别位于S/X馈源两侧±15°的对称位置。考虑到安装误差及结构变形等因素,将换馈机构的换馈角度设计为±16.5°。
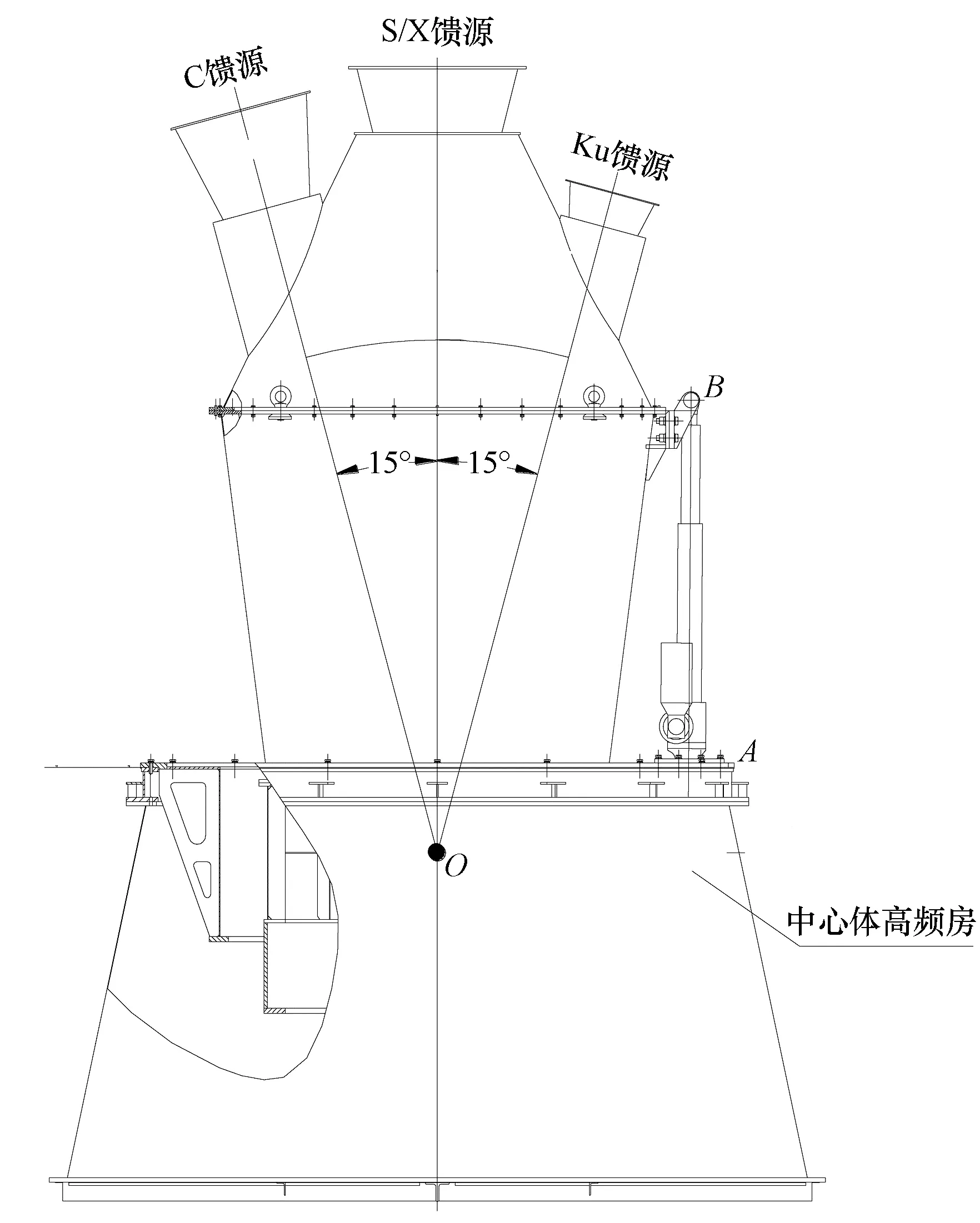
图1 钟摆式换馈图
1 换馈机构设计及其运动分析
1.1 换馈机构设计
根据该机构运动原理,将其简化为曲柄摇块机构[2],选择曲柄的有效行程角度为33°。根据图1,将该机构简化为如图2所示的机构运动简图。以mm为单位建立如图2所示的坐标系,其中O点为曲柄OB旋转中心,AB在丝杠螺母的驱动下以速度v在AB方向上滑动,AB能同时绕着定点A和动点B旋转,从而形成摇块。在如图所示的坐标系中,O、A、B三点坐标为(0,0)、(Xa,Ya)、(Xb,Yb),OB与OA之间夹角为θ。设OA=a,OB=b,AB=c,则可以得到:

(1)
(2)

(3)
根据要求,取Xa=1 485 mm,Ya=435 mm,带入式(1)得到a=1 547 mm。B点虽然绕A点做旋转运动,但长度b保持不变,取b=3 042 mm, 27.629 2°≤θ≤60.629 2°,则可以得到:
1 818 mm≤c≤2 652 mm
(4)
由式(4)可得,丝杠工作行程Δc= 834 mm,取速度v= 2.5 mm/s,则丝杠从0行程到满行程的换馈过程最多使用的时间:

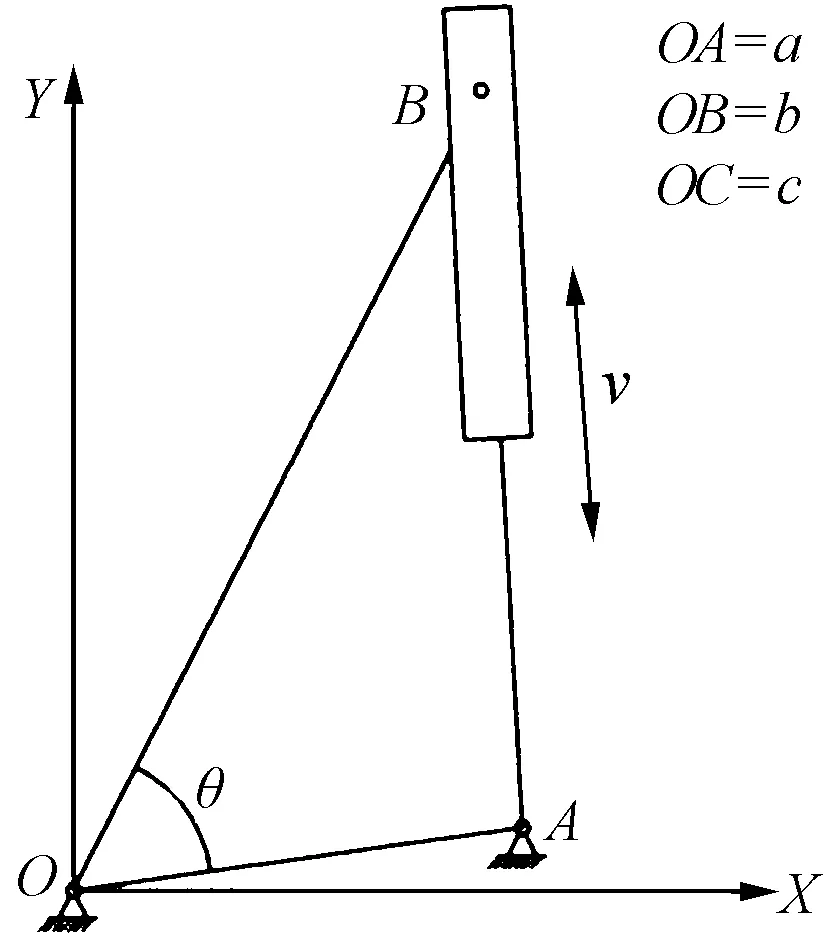
图2 换馈机构运动简图
1.2 换馈机构运动分析
根据式(3)可以得到:
(5)
选取推杆以速度v沿AB方向匀速运动,则:
c(t)=c0+vt
(6)
式中,c0为推杆0行程时A、B之间的距离,根据式(4)可知c0=1 818 mm。将式(6)带入式(5)得到曲柄OB绕点O旋转角度函数:
(7)
分别对式(7)求一阶、二阶导数,得到曲柄OB绕点O旋转的角速度和角加速度如下:
(8)
(9)
将速度v= 2.5 mm/s带入式(6)、(8)和(9)即可得到曲柄OB旋转的角速度和角加速度。
图3所示为丝杠从0行程到满行程的运动过程中,曲柄OB的旋转角速度和角加速度曲线。由图可知,由于丝杠运行速度缓慢,所以在整个运动过程中,曲柄的旋转角速度和角加速度非常小,其中角加速度达到10-4(°)/s2数量级。

图3 换馈支撑筒旋转角速度和角加速度曲线
对应于换馈机构,由以上分析可以得到,完成整个换馈过程所需时间为5.56 min,满足10 min的设计要求。当丝杠沿AB方向匀速伸长或缩短时,馈源及其支撑结构以非常小的角速度和角加速度绕旋转轴旋转运动,实现换馈。其中角加速度很小,因此可以将该机构的动力学问题简化为静力学问题做进一步研究。
2 换馈机构结构设计及有限元计算
2.1 换馈机构结构设计及有限元模型
根据以上确定的几何参数,设计换馈机构的结构如图4所示。

图4 换馈机构结构设计图
该换馈机构主要由换馈过渡筒、换馈支撑筒、换馈丝杠及其驱动、换馈旋转轴等组成,整个换馈机构通过过渡筒与原中心体上法兰直接螺栓连接,并通过止口定位,安装定位简单方便[3]。在换馈旋转轴两侧分别装有限位开关和旋变组合,对换馈支撑筒实际旋转角度进行监控,并与控制系统构成反馈回路,确保换馈精度和换馈机构运行安全。在换馈支撑筒的上端装入馈源及其支套。在换馈丝杠及其驱动的带动下,换馈支撑筒做单摆式往复运动,从而带动安装在换馈支撑筒上的馈源摆动,实现换馈。为了避免换馈丝杠承受压力的情况,将换馈丝杠布置在换馈机构的上方。馈源重心距离换馈机构的旋转轴较远,导致整个换馈机构尺寸较大,因此为尽量减小换馈丝杠的载荷,也为了提高换馈机构的整体刚度,在换馈支撑筒下端装入适当配重来平衡换馈丝杠的载荷和换馈支撑筒的变形。所有结构件均使用Q235钢材。
该天线馈源及其支套重量达到1 800 kg,且其重心距离换馈机构旋转轴较远,达到3.2 m。除此之外,馈源相心距离换馈机构旋转轴2.5 m,相对较远,因此为了研究换馈机构工作时的结构变形对馈源相心位置的影响,有必要对该换馈机构工作时的结构变形进行计算和校核。同时,为了减轻该换馈机构的重量以减轻天线反射体和座架的载荷,在换馈机构各结构件设计中多采用薄壁板件焊接而成。对于重载荷薄壁板结构件,有必要对其结构强度进行分析校核,以确保换馈机构工作时不发生结构破坏。因此利用有限元软件ANSYS建立如图5所示的换馈机构结构三维有限元模型,对该结构的强度和刚度进行计算。
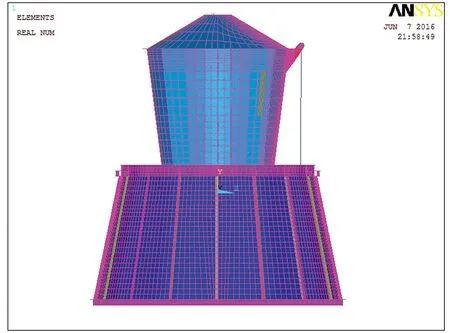
图5 换馈机构结构三维有限元模型
为简化模型,将馈源及支套用质量元Mass21模拟,丝杠用杆Link8单元模拟,所有销轴均用梁Beam188单元模拟,其余板件均用壳单元Shell63模拟。为了很好地模拟该换馈机构的边界约束条件,用壳单元Shell63模拟与换馈机构相连的中心体高频房,将约束条件施加在高频房底部,则根据圣维南定理[4],能够较准确地模拟出换馈机构结构的受力和传力情况。由于该天线在工作时姿态较多,同时换馈机构本身工作状态也不唯一,因此为了能够模拟出换馈机构工作时的恶劣工况,选择天线指平和朝天2种姿态,换馈机构S/X馈源工作、C馈源工作和Ku馈源工作3种工作状态(共6种工况),对换馈机构在重力作用下进行结构力学计算和分析。
2.2 有限元计算结果
图6~图8为在上述6种工况下,换馈机构工作时的结构重力变形云图。当天线朝天时,换馈机构沿天线轴线方向(模型中Y向)变形对天线指标影响较大;在天线指平时,沿天线横向(模型中Z向)变形对天线指标影响较大。因此,当天线朝天时,关注换馈机构Y向结构变形;当天线指平时,关注换馈机构Z向结构变形。对换馈机构在各种工况下工作时的结构变形进行统计,如表1所示。由表1可知,在换馈机构工作时,如果天线指平或者仰角较低,则换馈机构沿天线横向变形的最大值将达到1.91 mm。
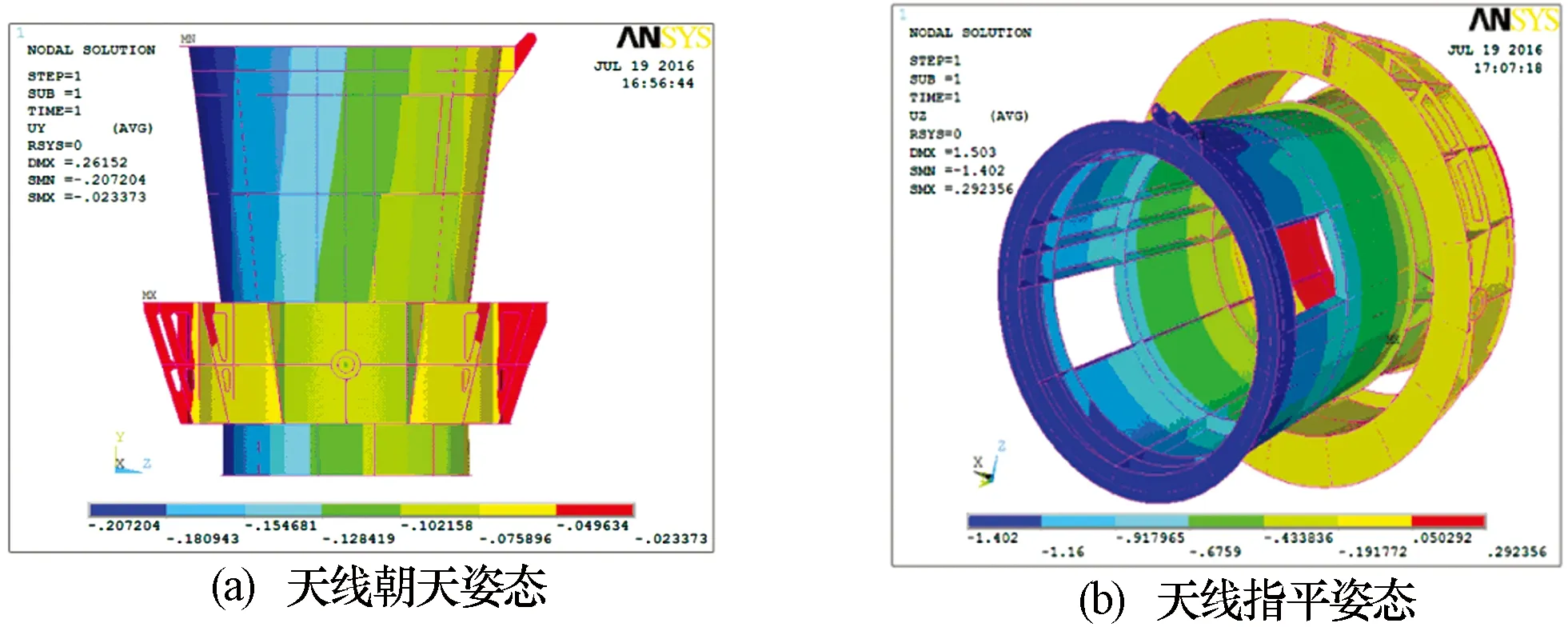
图6 S/X馈源工作时换馈机构结构变形云图

图7 C馈源工作时换馈机构结构变形云图
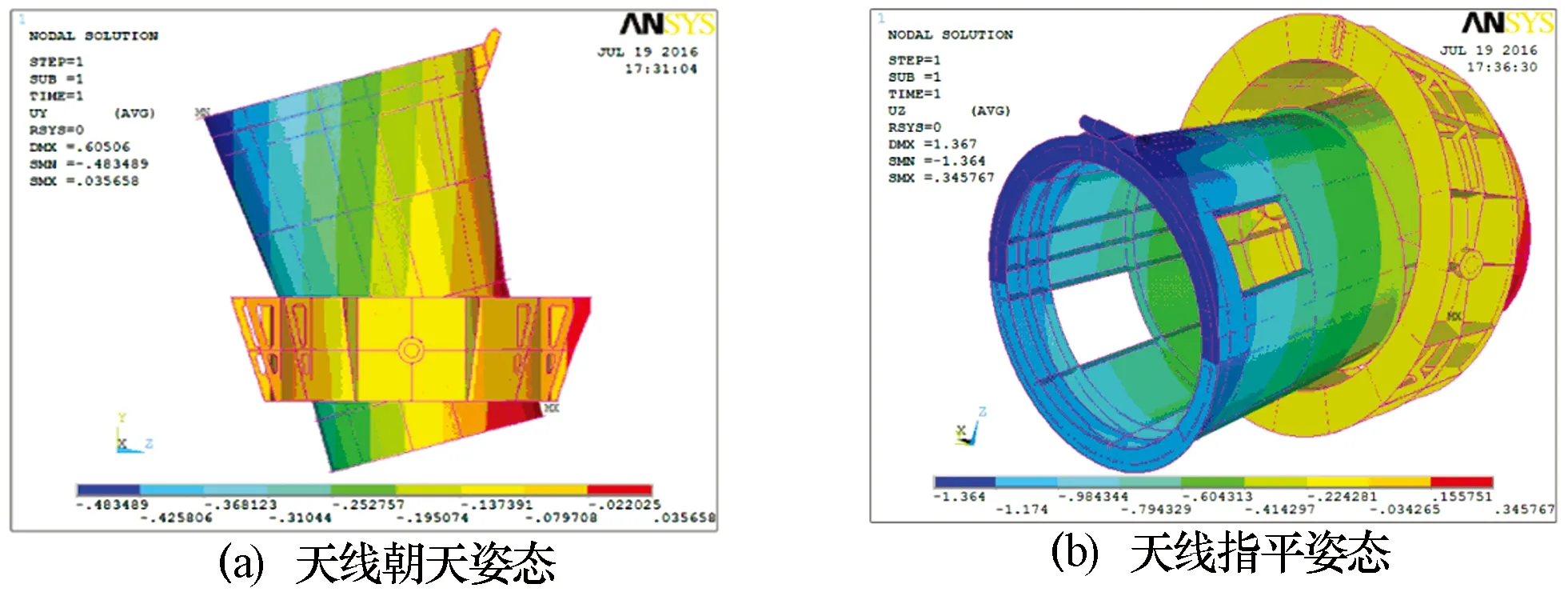
图8 Ku馈源工作时换馈机构结构变形云图
表1 换馈机构各工况下变形最大值统计 mm
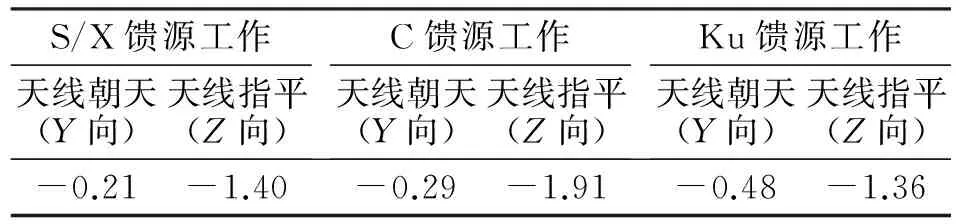
S/X馈源工作天线朝天(Y向)天线指平(Z向)C馈源工作天线朝天(Y向)天线指平(Z向)Ku馈源工作天线朝天(Y向)天线指平(Z向)-0.21-1.40-0.29-1.91-0.48-1.36
换馈机构工作时,整个设备重量通过过渡筒上法兰传递给中心体高频房,再传递给天线座和塔基。在换馈机构内部,主要承力部位为过渡筒和支撑筒旋转轴处、换馈丝杠两端支耳和连接处,因此在这些部位会出现应力峰值。对图9~图11所示的各种工况下换馈机构工作时结构应力最大值进行统计,结果见表2。由表2可知,换馈机构工作时的最大应力为59.22 MPa。
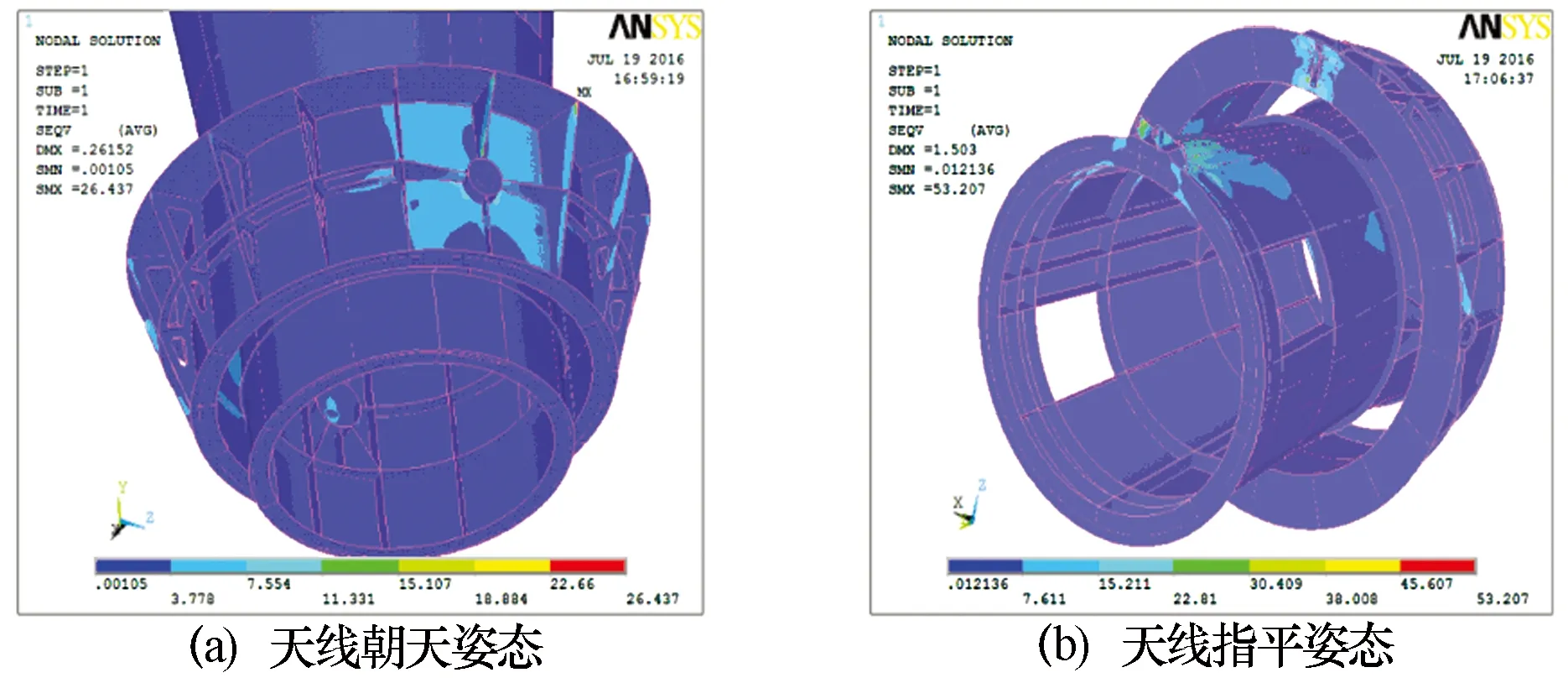
图9 S/X馈源工作时换馈机构结构应力云图

图10 C馈源工作时换馈机构结构应力云图
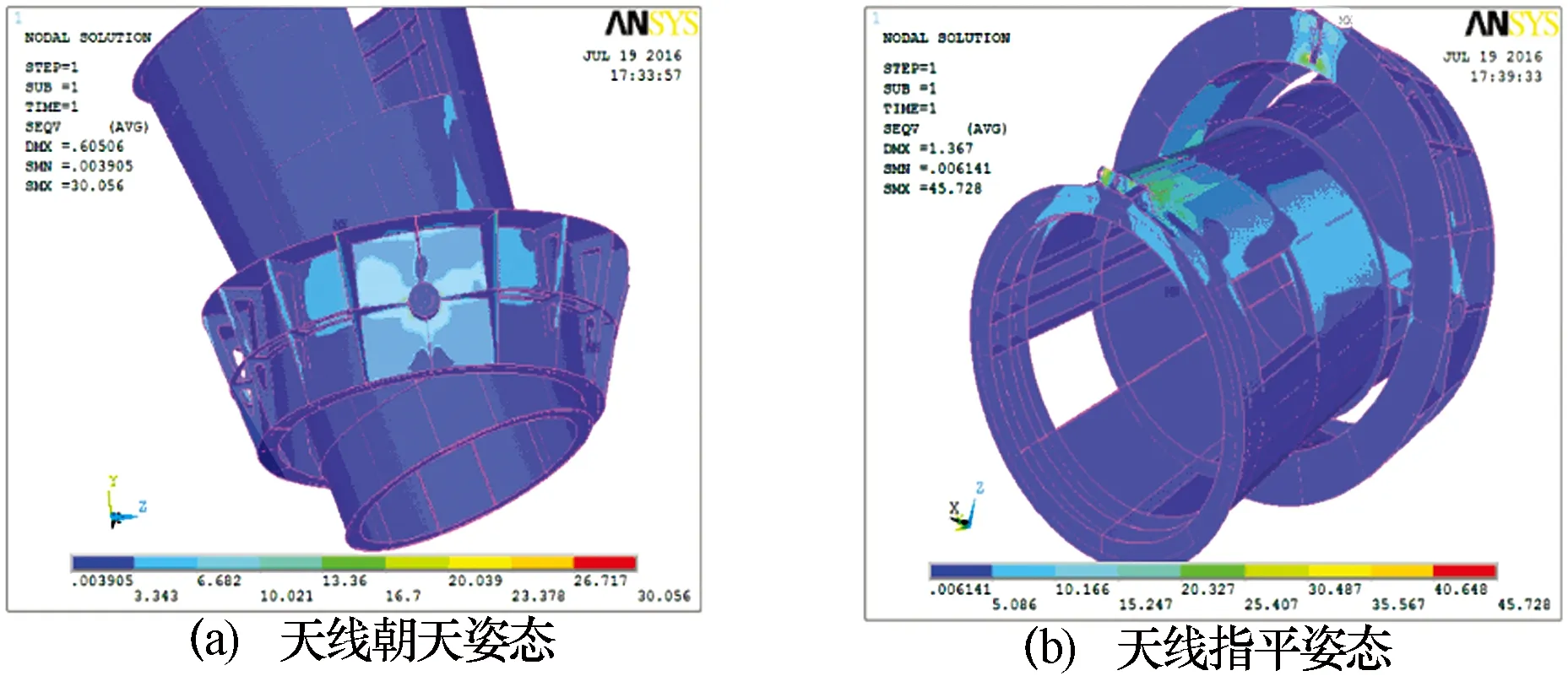
图11 Ku馈源工作时换馈机构结构应力云图
表2 换馈机构各工况下变形最大值统计 MPa
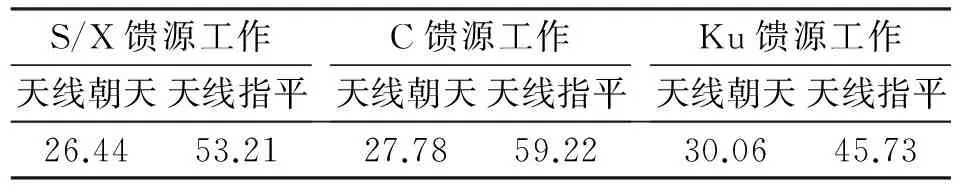
S/X馈源工作天线朝天天线指平C馈源工作天线朝天天线指平Ku馈源工作天线朝天天线指平26.4453.2127.7859.2230.0645.73
3 结果分析
3.1 强度计算结果分析
在该结构设计中使用的材料是Q235钢材,其容许应力为157 MPa。由以上有限元计算结果可以看出,当换馈机构在以上6种工况下工作时,其结构应力最大值为59.22 MPa(小于157 MPa),发生在C馈源工作天线指平工况下,应力最大点出现在换馈过渡筒中筋板与上端法兰连接的连接处,属于应力集中,但满足结构强度要求。
3.2 刚度计算结果分析
由以上有限元计算结果可以看出:该换馈机构工作时,结构沿天线纵向的位移最大值为0.48mm(小于3 mm),满足结构刚度要求;结构沿天线横向的位移最大值为1.91 mm(Ku馈源工作时横向最大位移为1.36 mm),直接影响到天线的指向精度,对高频馈源更为突出[5]。因此,有必要研究横向变形量对高频段Ku馈源的方向图、增益和指向精度的影响,以进行比较和分析。
3.3 指向精度分析
由于Ku馈源对指向要求较高,因此以Ku馈源为标准来校核该换馈机构的指向精度。馈源相心横向偏移对天线的指向精度影响最为严重,该换馈机构中导致馈源相心横向偏移的因素有:
1)换馈机构止口定位产生的横向偏差为0.05 mm;
2)旋转轴及轴承间隙产生的横向偏差分别为0.03 mm和0.04 mm;
3)丝杠两端铰接处各产生0.06 mm的横向偏差;
4)重力变形导致的横向偏差为1.36 mm。
因此该换馈机构引起的馈源横向偏移δ=1.6 mm。利用Grasp软件分别计算Ku馈源横向偏移为0 mm和1.6 mm时天线的方向图,如图12所示。通过Grasp软件读出当Ku馈源发生1.6 mm横向偏移时,天线增益值基本不变,保持为75.299 5 dB,指向偏差α1=0.001 887 5 ° = 6.795″。
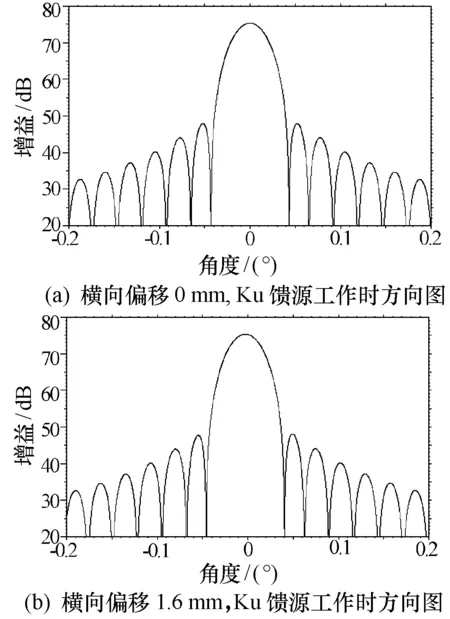
图12 Ku馈源横向偏移时的方向图
除此之外,影响换馈机构指向精度的另一个重要分量为换馈丝杠位置精度。该换馈机构中丝杠行程位置精度为0.1 mm,导致指向最大偏差α2=17″,因此该换馈机构的指向精度α= 23.795″(小于25″),满足设计要求。
在目前的结构形式下,该换馈机构已经能够满足结构强度要求以及馈源对于结构刚度的要求,但是对天线的指向精度依然有所影响。为了修正天线指向,使天线指标达到更好的效果,可以通过控制加上结构预调的方式减小馈源横偏,以达到预期的指向精度。在实际工作时,利用控制回路,先针对Ku频段对换馈机构进行预调,以提高天线的指向精度,然后复测得到天线的各项指标。
实测结果显示,换馈机构结构预调后,各频段馈源工作时天线指向精度得到了修正,天线指标均为良好。其中,通过对比改造前后天线方向图发现,S/X馈源工作时天线的增益有所增加,指标有所提高。
4 结束语
本文设计了一种新型钟摆式自动换馈机构,该机构原理简单,安装方便,易于操作,能够实现自动切换馈源到位的功能。同时,通过以上分析可以得到以下结论:
1)该换馈机构工作时,丝杠沿运动方向匀速伸出或收回,换馈支撑筒带动馈源绕旋转轴作非匀速转动。丝杠运动速度较慢,导致换馈机构支撑筒转动角速度和角加速度都很小,因此可以将此动力学问题简化为静力学问题进行研究。
2)该换馈机构正常工作时,其结构应力最大值为59.22 MPa,满足结构强度要求;结构沿天线轴线方向变形最大值为0.48 mm,沿天线横向变形最大值为1.91 mm,满足结构刚度要求;其指向精度为23.795″,满足电气指标要求。
3)该换馈机构通过绕平行于天线俯仰轴的旋转轴旋转摆动实现换馈,因此可以通过对换馈机构进行结构预调来修正结构变形引起的馈源相心横向偏移,从而修正馈源和天线的同轴度和天线的指向精度。
4)对于S/X馈源,比较天线方向图,由实测数据可知,使用换馈机构对天线进行改造后,天线的增益有所增加,指标有所提高。
因此从设计角度上考虑,该换馈机构能够实现换馈功能,且满足结构强度和刚度要求,也能满足各馈源对结构变形的要求。从实际应用角度考虑,该换馈机构已经顺利安装并投入使用,各项性能指标良好,不仅没有降低天线指向精度和效率,反而使天线指标有所提高。因此,该换馈机构的成功使用,在降低天线制造成本的同时提高了该天线的使用效率,对以后工程的设计具有一定的指导意义。
[1] 王宇哲. 大型射电望远镜多馈源切换机构的设计[J]. 无线电工程, 2010, 40(5): 52-53.
[2] 孙桓, 陈作杰, 葛文杰. 机械原理[M]. 北京: 高等教育出版社, 2006.
[3] 濮良贵, 纪名刚. 机械设计[M]. 北京: 高等教育出版社, 2004.
[4] 徐芝纶. 弹性力学简明教程[M]. 北京: 高等教育出版社, 1997.
[5] 叶尚辉, 李在贵. 天线结构设计[M]. 西安: 西北电讯工程学院出版社, 1986.
李 燕(1988-),女,工程师,主要从事天线结构设计和力学分析工作。
Structure Design and Finite Element Analysis of Feed-switching Mechanism in a 40 m Antenna
LI Yan
(The39thResearchInstituteofCETC,Xi′an710065,China)
A new style of feed-switching mechanism is designed for a 40 m antenna in this paper according to actual engineering requirements. This feed-switching mechanism is simple in structure and easy to operate. Feed-switching drive makes feed rotating around axis to realize feed switching. The feed-switching mechanism works under complicated working conditions. Because of small rotation angle and long time requirements, the feed rotates with very low velocity and acceleration, therefore statics methods can be used for research. Structure modeling, calculation and analysis for the feed-switching mechanism are conducted using ANSYS. The results show that the mechanism can meet the strength and stiffness requirements of feed under complex working conditions. This feed-switching mechanism can reduce the manufacturing cost of the antenna and increase its efficiency.
feed-switching mechanism; structure design; ANSYS
2016-09-06
TN82
A
1008-5300(2017)02-0022-05