基于BP神经网络的UCAV航迹综合评价
2017-08-28张淘沙
张淘沙,鲁 艺
(1.空军第一航空学院,河南 信阳 464000;2.空军工程大学航空航天工程学院,西安 710038)
基于BP神经网络的UCAV航迹综合评价
张淘沙1,鲁 艺2
(1.空军第一航空学院,河南 信阳 464000;2.空军工程大学航空航天工程学院,西安 710038)
针对目前航迹规划过程中评价指标难以统一且指标权重确定过分依赖主观经验的问题,在建立较为完备的UCAV航迹评价指标体系基础上,引入BP神经网络对UCAV备选航迹进行综合评价,从备选航迹的样本数据出发,客观分析航迹的优劣,为决策者提供更加科学合理的参考依据,最后结合仿真算例,验证了该方法的可行性。
UCAV航迹,综合评价,指标标准化,BP神经网络
0 引言
传统航迹规划问题是通过构建航迹代价函数并结合寻优算法得到一条最优航迹,但航迹规划不仅是多目标优化问题,更是集作战态势、作战决心、技术和战术于一体的综合性作战决策问题,传统方法得到的航迹对决策指挥人员来说并非是绝对的最优[1-2]。当任务改变或在飞行过程中遇到突发情况时,预先规划好的航迹可能不再适用,备选航迹就成为提高任务成功率的重要手段[3-4]。在作战使用中,如何快速地在备选航迹方案集中进行决策,对航迹综合评价的研究提出了更迫切的需求,见文献[5-7]。本文引入BP神经网络,在建立评价指标体系的基础上,以真实航迹样本数据为基础,客观评价每条航迹的优劣,进而为指挥员提供决策依据和参考。
1 评价指标体系构建
1.1 指标选取
选取科学合理的评价指标是进行科学合理评价的前提和基础。结合UCAV作战使用的特殊性及影响总体作战效能的因素,本文以飞行性能、满足任务参数、突防性能和航迹鲁棒性作为一级指标,选取影响一级指标的主要因素作为二级指标,建立如下页图1的UCAV航迹综合评价指标体系[8-9]:
在图1的指标体系中,部分指标的涵义及量化定义如下:①目标进入角:从某一预先确定角度进入目标,与具体任务性质有关。通常存在某一确定的方向θbest,使得以该角度接近目标,能保证从目标最薄弱方位进行有效攻击;②巡航飞行高度:UCAV在做巡航飞行时,距离地面的高度[6];③地形跟踪高度:地形跟随飞行时距离地面的高度。在低空突防时UCAV跟踪地形的最佳离地高度Hbest为:海面上空3 m~15 m,陆地平原上空为60 m~80 m,丘陵山区上空为130 m左右;④威胁区暴露时间:UCAV在搜索雷达(CSR)或跟踪制导雷达可发现并跟踪的区域内飞行所需要的时间,可由飞经威胁区的长度与平均速度的比值求出;⑤不可飞航迹点数目:不满足任务设定的杀伤概率条件航迹点数目,表征生存力的重要指标。考虑该指标主要因为传统寻优算法只是选择航迹整体代价值较优的航迹,某条航迹可能整体代价值最小,但局部某些航迹点所受威胁度可能很大,导致没有评价航迹的所有信息熵[10]。
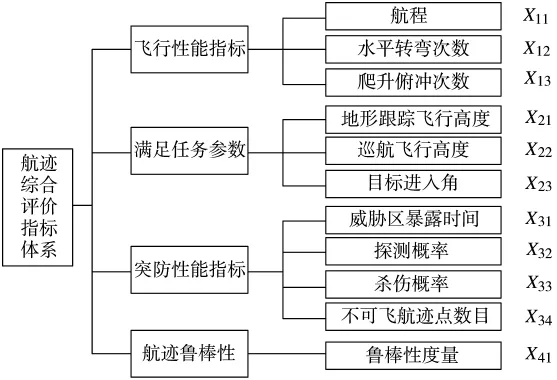
图1 UCAV航迹综合评价的指标体系
1.2 指标标准化
①成本型指标:

②效益型指标:

③适度型指标:
其中,xbest为评价指标的最合适值。
根据各子指标在实际使用中的特点,表1给出了选取的11个指标的所属的不同标准化类型。

表1 指标标准化类型分类
2 综合评价模型建立
在航迹综合评价问题中,一些指标相互耦合,呈现复杂非线性关系,BP神经网络作为一种智能化数据处理方法,为综合评价问题提供了强有力的工具[11]。BP神经网络是一种前馈网络,该网络可模拟专家进行定量评价,减轻了人为选择权重的主观影响与不确定性,提高了评价结果的可信度[12]。
2.1 BP神经网络算法
2.1.1 训练样本的选取
对BP神经网络评价问题,通常认为训练样本数目与神经网络之间有如下式子:

Np为所需训练样本数目,NI为输入层节点数,NO为输出层节点数,Nh为隐含层点数。
2.1.2 隐含层节点数确定
构建BP网络时最应注意隐含层节点数选取,根据目前研究,主要有以下3种确定隐含层节点数 Nh的方案,可供试验参考:①
2.1.3 训练函数选取
本文采用L-M算法作为训练函数,相比其他算法,L-M算法迭代次数少,收敛速度快,精确度高,更适用于备选航迹快速有效的评价要求。L-M算法的权值调整公式为[13]:

式中,J为误差对权值微分的雅可比矩阵;e为误差向量;μ为学习速率。
2.2 航迹综合评价模型
本文采用三层BP神经网络进行评价,如下页图2所示,输入层为样本矩阵;中间为网络隐含层;输出层为航迹综合评价值。
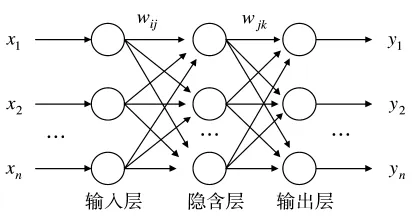
图2 建立的三层评价网络
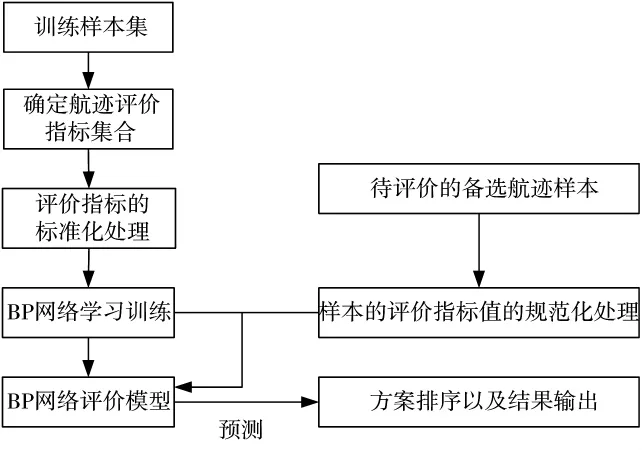
图3 航迹综合评价流程
图3给出了基于BP神经网络的航迹综合评价流程,对于流程中的网络学习训练环节,本文通过专家打分法进行期望评估:邀请专家独立地对指标体系中一、二级指标的相对重要度进行评判,从而得到初始的期望输出样本。利用BP神经网络的学习能力,通过训练后的稳定网络即具备对不同航迹的模式识别能力。在实际应用中,将训练好的神经网络存入文件,输入待评价航迹的指标矩阵,启动网络,即得到航迹综合评价值。
3 评价的实现
本文选取网络训练样本规模为15,样本指标值根据式(1)~式(3)进行处理,得到样本指标标准化矩阵,见表2。设预先任务规划中地形跟踪最佳高度Hbest=135 m;最佳目标进入角θbest=20°。在计算样本的期望输出时利用专家打分法得到的指标权重如下:一级指标:二级指标
建立三层 BP 神经网络,NI=11,Nh=20,NO=1,最大训练步数epochs为500,goal为1×10-7,其他参数采用缺省值。输入层到隐含层及隐含层到输出层传递函数分别采用对Sigmoid型Logsig()函数和正切Sigmoid型Tansig()函数;训练函数选用Trainlm函数。采用MATLAB中神经网络工具箱Neural Network Toolbox提供的图形用户界面(GUI)进行建模与仿真,仿真结果及分析如下:
表2 标准化后的评价指标值
下页图4为L-M训练函数(trainlm)的误差曲面,gradient图表示误差曲面梯度,当梯度达到某一个值时就可以结束训练,变量Mu是算法的一个参数取值。图5为网络训练误差曲线,网络训练进行51步时,误差平方和MSE满足标准误差goal的要求,完成了网络训练。训练效果如图6,红色为网络输出结果,网络训练值跟随期望输出变化,虽然两者之间有一些误差,但曲线走势非常接近,最后方案排序是基本相同的,效果比较理想,网络比较稳定。
为验证所建BP评价网络的有效性及结果是否可信,选用5组仿真得到数据作为检验样本(见表3),将表中数据进行标准化后,输入建好的模型中作为待评价对象,最终得到评价结果见表4。结果表明该评价模型在误差允许范围能够有效客观评价航迹的综合性能,与专家评价保持较好一致性。
图4 L-M训练函数的误差曲面
图5 全局误差曲线
图6 样本的训练效果
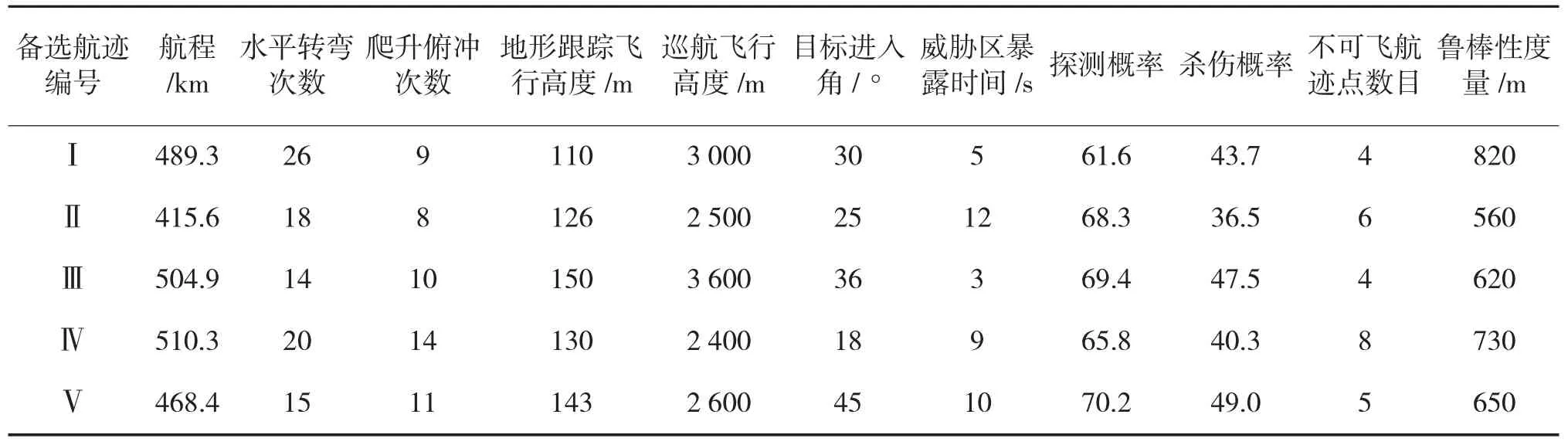
表3 5条备选航迹评价指标值
4 结论
为确定备选航迹的综合性能,本文根据影响作战效能的关键因素构建了评价指标体系,并对不同类型指标的属性值进行标准化处理,运用BP神经网络建立了综合评价模型对备选航迹进行综合评价,为指挥员在备选航迹中决策提供了理论依据和支撑。最后进行了仿真分析,表明通过训练的稳定BP网络能合理地对备选航迹进行评价。

表4 备选航迹方案排序
[1]王俊,周树道,朱国涛,等.无人机航迹规划常用算法[J].火力与指挥控制,2012,37(8):5-8.
[2]刘钢,老松杨,谭东风.基于功能区域的反舰导弹逆向航路规划 [J].系统工程与电子技术,2011,33(4):799-805.
[3]严江江,丁明跃,周成平.基于K均值聚类和遗传算法的多航迹规划方法[J].火力与指挥控制,2010,35(3):147-150.
[4]李素娟,肖前贵,高艳辉,等.多约束条件下UCAV航路规划动态评价方法[J].指挥控制与仿真,2012,34(2):36-39.
[5]张瑞玲.基于多目标的航迹评价方法[J].黑龙江科技信息,2013(27):51-52.
[6]ZHANG D Q,ZHAO J F,WANG M H,et al.Grey evaluation and optimization of UAV’s path planning method[C]//2010 2nd International Conference on Electronic Computer Technology(ICECT 2010):85-88.
[7]向明思,刘新学,方喜龙,等.基于DHGF算法的巡航导弹参考航迹综合性能评价研究[J].第二炮兵工程学院学报,2012,26(3):65-70.
[8]冯琦,周德云.UCAV任务规划系统的研究进展及发展综述[J].飞行力学,2003,21(2):1-4.
[9]SWARTZENTRUBEN L S,JUNG L F,ELIOT H W.Three-dimensional multi-objective UAV path planner using terrain information [C]//USA.50th AIAA/ASME/ASCE/AHS/ASC Structures,Structural Dynamics,and Materials Conference,California,2009:1-19.
[10]张亮.基于生存原则的无人机航路规划方法研究[D].西安:空军工程大学,2010.
[11]HAGUE M E,SUDHAKAR K V.ANN back-propagation prediction model for fracture toughness in microalloy steel[J]. InternationalJournalofFatigue,2002,24 (9):1003-1010.
[12]LI J,SUN D.Path planning using case-based learning and its neural network implementation of the lunar vehicle’s self-autonomous navigation[C]//The Proceedings of the 3th world Congress on Intelligence Control and Automation,2000:1182-1186.
[13]王建梅,覃文忠.基于L-M算法的BP神经网络分类器[J].武汉大学学报 (信息科学版),2005,30(10):928-931.
UCAV Aircraft Path Evaluation Based on BP Neural Network
ZHANG Tao-sha1,LU Yi2
(1.The First AeronauticalCollege of Air Force,Xinyang 464000,China;2.Engineering College of Aeronautics and Astronautics,Air Force Engineering University,Xi’an 710038,China)
At present, the evaluation index of path planning is difficult to unity and path evaluation function depends more on subjective experience.The two problems cause decision makers feel hard to choose final path in alternative paths.Aiming to the situation,a relatively complete UCAV path evaluation index system is established.And then,in the case of known alternative paths information,BPNeural Networkmethod is proposed to comprehensively evaluate the alternative paths and give the paths’final sorting,which provides reasonable suggestion for decision makers.At last,actual calculations are introduced to demonstrate the feasibility of the method in the paper.
UCAV path,comprehensive evaluation,quantitative index,BP neural network
TJ012.4
A
10.3969/j.issn.1002-0640.2017.07.033
1002-0640(2017)07-0153-04
2016-05-11
2016-06-08
张淘沙(1990- ),男,江苏宿迁人,硕士研究生。研究方向:飞行器航迹规划,指挥控制与引导。
