混合动力装甲车辆能量管理策略实时仿真
2017-08-28刘春光庞宾宾刘越战
项 宇,刘春光,庞宾宾,刘越战
(1.装甲兵工程学院全电化技术重点实验室,北京 100072;2.解放军61081部队,北京 100094;3.解放军66410部队,北京 100042;4.阜阳市太和县马集乡农业综合服务站,安徽 太和 236600)
混合动力装甲车辆能量管理策略实时仿真
项 宇1,2,刘春光1,庞宾宾3,刘越战4
(1.装甲兵工程学院全电化技术重点实验室,北京 100072;2.解放军61081部队,北京 100094;3.解放军66410部队,北京 100042;4.阜阳市太和县马集乡农业综合服务站,安徽 太和 236600)
为解决混合动力装甲车辆多动力源输出优化匹配难题,针对一种具有3个动力源的混合动力系统中各动力源的输出特性和驱动电机功率需求特点,制定了具有双层结构的能量管理策略:顶层的系统功率分配策略完成负载功率估计及其在各动力源间的分配;底层的部件级控制策略实现发动机-发电机组和动力电池的优化控制。通过构建一种分布式硬件在环仿真平台对能量管理策略进行仿真验证。结果表明:混合动力系统能够很好地满足负载功率需求,实现了对多个目标的优化控制。
电传动车辆,混合动力系统,能量管理,硬件在环仿真
0 引言
采用多动力源系统的电传动装甲车辆能够满足未来战争对陆战平台的机动、防护和火力性能的要求,并为其他装备提供多规格电源,减轻作战分队后勤保障压力[1]。而混合动力车辆的性能发挥依赖于各动力源的协调控制,由此衍生的能量管理成为研究的热点,也是混合动力电传动装甲车辆研究的关键技术之一[2]。能量管理策略受电传动系统结构、动力源及负载特性等多种因素影响,控制方法灵活多样[3]。目前,最优控制策略,特别是动态规划和人工智能算法已被应用于车辆能量管理,实现特定的控制目标。见文献[4-11]。
本文针对多动力源系统结构及各动力源特性,结合当前的能量管理方法中存在的问题,提出了多目标优化的双层能量管理策略,实现对车辆混合动力系统的优化控制。构建了一种分布式硬件在环仿真平台,对设计的能量管理算法进行仿真验证。
1 混合动力系统结构
本文研究对象为某型轮式电传动装甲车辆,其混合动力系统结构如图1所示。发动机-发电机组(Engine Generator Set,EGS)为主动力源,动力电池和超级电容为辅助动力源。通过可控整流器实现对EGS的输出控制。动力电池经双向DC/DC功率变换器与EGS输出匹配,满足负载需求。直流母线并联超级电容和能耗电阻,抑制母线电压波动并保证高压安全。系统由8个电机驱动车辆行驶。

图1 串联式混合动力系统结构
2 双层能量管理策略
本文研究的串联式混合动力系统通过可控整流器和双向DC/DC功率变换器,实现了EGS、动力电池和超级电容输出解耦,为能量的传递控制提供更多的选择。在此设计具有系统功率分配和部件级优化控制两个层次结构的能量管理策略。
2.1 系统功率分配
系统功率分配主要包括负载功率估计和功率分配两部分。
2.1.1 负载功率估计
准确预估驱动电机的总功率需求是进行系统功率分配的关键。驱动电机的功率与电机转速、目标转矩、母线电压有关。第i个电机的需求功率如式(1)。

其中,Pi需求功率;Ti为目标转矩;ni为转速;fi(Ti,ni)为电机及其驱动系统的效率分布函数。
由于存在测量及控制误差,实际功率与估计功率之间有偏差,功率估计不足或过高的直接反映为母线电压上升或下降。可根据母线电压的高低,对估计的电机需求功率进行补偿,如式(2)所示。

其中,Pload为驱动电机直流母线侧需求功率;vdc_high、vdc_low分别为设定的负载功率补偿时的母线电压上限和下限;khigh、klow分别为母线电压过高或过低时的负载功率补偿系数。
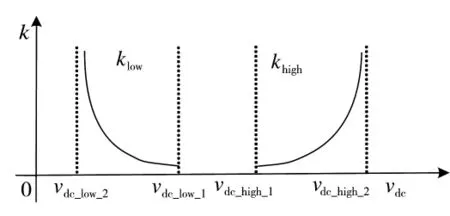
图2 补偿系数khigh和klow与母线电压
补偿系数khigh和klow与母线电压的关系如图2所示。母线电压超出[vdc_low_1vdc_high_1]范围时开始补偿估计的驱动电机需求功率,最终控制母线电压在[vdc_low_2vdc_high_2]范围内波动。
2.1.2 基于规则的负载功率分配
电传动装甲车辆最重要的特性是机动性和静音行驶,这两点都需要保持动力电池的荷电状态(State of Charge,SOC)在合理的范围内,以保证动力电池能够在EGS功率不足或静音行驶时输出功率,在回馈制动或母线电压过高时吸收能量。因此,本文根据负载功率Pload和动力电池SOC制定了基于规则的负载功率分配策略。在混合动力模式下,功率分配规则表达式如式(3)和式(4),这两个表达式均能覆盖混合动力模式下系统运行的所有工作状态。
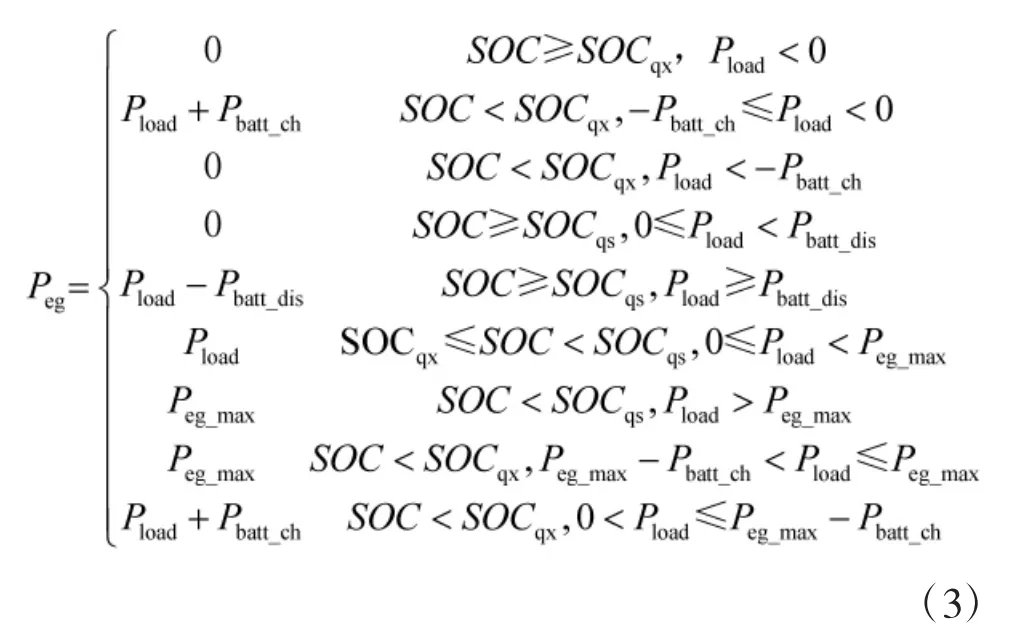

其中,Peg为EGS目标功率;Pbatt为动力电池目标功率;Peg_max为EGS最大输出功率;Pbatt_ch为电池最大充电功率;Pbatt_dis为最大电池放电功率;SOCmax和SOCmin分别为电池SOC上限和下限;SOCqs和SOCqx分别为SOC目标区域上限和下限,且有SOCmin<SOCqx<SOCqs<SOCmax。EGS和动力电池的相关功率表达皆为直流母线侧功率。
2.2 部件优化控制
2.2.1 EGS控制
(1)发动机工作转速
为降低发动机燃油消耗,控制发动机沿最佳燃油曲线工作。依据发动机万有特性曲线,通过确定发动机各功率等级对应的最低耗油点,可获得发动机最佳燃油曲线。根据发电机和整流器的效率将分配给EGS的目标功率Peg换算到发动机轴侧输出功率,再依据发动机最佳燃油曲线上功率与转速的对应关系,可得发动机最佳目标转速n*。
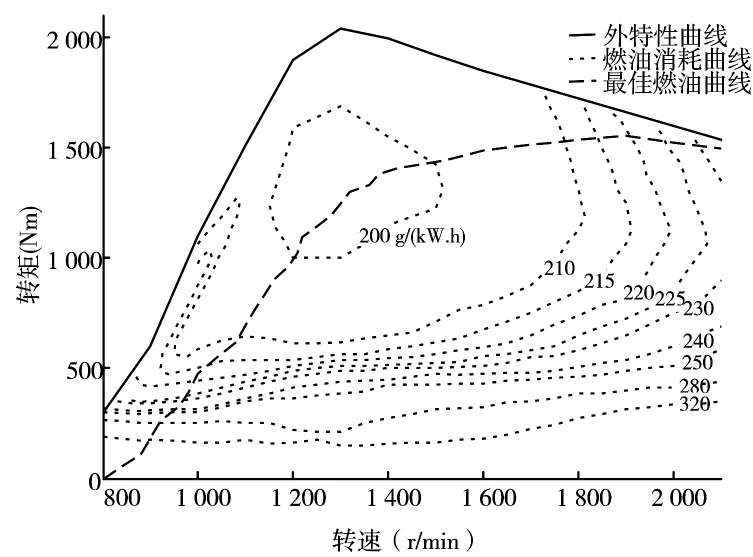
图3 发动机万有特性曲线图
(2)发电机目标转矩
控制发电机电磁转矩实现对发动机-发电机组输出功率控制。通过EGS输出功率闭环实现对发电机目标转矩的调节,发电机电磁转矩目标值Tem*表达式为:

式中,fn_P为考虑EGS系统效率后最佳燃油曲线上转速和EGS直流侧功率的对应关系;n为发动机实际转速;ieg为整流器直流侧电流;kp、ki控制参数。取min(n*,n)用于计算功率闭环的给定值,既保证了负载功率变大时发动机转速的平稳上升,又能保证负载变小时EGS输出功率不过大。
2.2.2 动力电池控制
DC/DC控制动力电池的输入输出,电池放电时DC/DC定电压输出、充电时DC/DC定电流输出。DC/DC具体控制策略表达为:

其中,vf*为电池放电时DC/DC输出目标电压;ic*为电池充电时DC/DC目标电流;vc1为母线电压过高时自动给电池充电的电压下限;vc2为Pbatt<0时的电池充电起始电压;vdc_goal为理想的母线电压值;f(SOC)为不同SOC对应的电池放电时DC/DC目标电压函数;kc1、kc2分别表示电池两种充电情况下的调整参数。且 vc2<vc1≤vdc_goal。

图4 f(SOC)与SOC 关系
函数f(SOC)与SOC关系如图5所示,f(SOC)值范围在vdc_goal以下,在发动机转速调整或负载波动过程中首先由超级电容弥补负载功率需求,防止动力电池频繁放电,损坏电池。动力电池的SOC较高时f(SOC)值较大,即DC/DC目标电压值vf*值较大,能减小母线波动范围;SOC值较低时,使vf*相对较小,尽量使电池不放电。
系统总体的能量管理策略原理框图如下页图5所示。
3 分布式硬件在环仿真平台
硬件在环仿真技术是在虚拟试验环境下检验真实控制器的可靠性及适用性的一种有效方法,硬件在环仿真方案较多[12-15]。为提高仿真精度,本文设计了一种分布式硬件仿真系统,实现了机械、电气、控制等分系统的联合仿真,如图6所示。
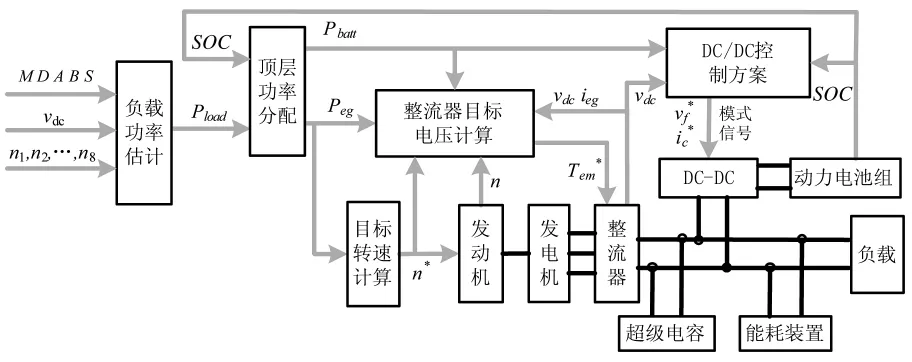
图5 系统能量管理策略原理框图

图6 分布式硬件在环仿真平台原理框图
两台RT-LAB仿真器分别运算动力源系统及电机驱动系统模型,仿真步长20 us。RT-LAB接收中央控制器指令和Vortex反馈信号,上传状态信息,两台RT-LAB之间采用模拟I/O接口传送vdc和iload信息。利用车辆动力学软件Vortex建立的车辆动力学模型,Vortex工作站根据驾驶指令B、S以及转矩 T1,T2,…,T8,实时运行车辆模型,并反馈车轮转速等信息。中央控制器接收驾驶员操控指令以及RT-LAB和Vortex反馈的系统信息,发出控制指令。

表1 各部件参数
4 仿真验证
以分布式硬件在环仿真平台为基础,选择车辆加速/制动以及爬坡/下坡两种典型工况,对制定的能量管理策略进行验证。系统参数如表1所示。
4.1 平坦路面行驶
下页图7为动力电池SOC初始值为50%时,车辆在平坦路面行驶的仿真结果。
驾驶员操控指令如图7(a)所示,车辆在23 s~65 s以及90 s~130 s期间急加速,达到最高速度,负载达到恒功率运行状态。由于EGS响应慢,当EGS输出功率不足且母线电压未达到DC/DC放电目标电压时,超级电容弥补功率不足。当母线电压在40 s和100 s降到DC/DC放电目标电压时,DC/DC稳压放电,由动力电池弥补负载需求。在126 s~137 s和166 s~173 s期间有制动能量回馈,超级电容首先吸收回馈电流。由于电池SOC未达到65%~75%理想范围,负载功率较小时,电池充电。

图7 平坦路面仿真结果
行驶过程中发动机工作点在万有特性曲面上的分布如图8所示。可知,发动机工作点在燃油曲线附近波动,由于仿真中负载功率需求较大,因此,发动机工作点主要分布在沿燃油曲线的中高功率区域。仿真中负载需求变化剧烈,EGS分配功率也变化较快,而发动机转速动态响应较慢,致使少部分发动机工作点与燃油曲线偏离较远。

图8 发动机工作点分布
4.2 车辆爬坡/下坡
图9为电池SOC初始值为50%时,车辆爬坡/下坡工况下仿真结果,其中在27 s~60 s连续爬两个30°斜坡,在60 s~90 s车辆转向180°,在90 s~110 s期间车辆连续下坡。

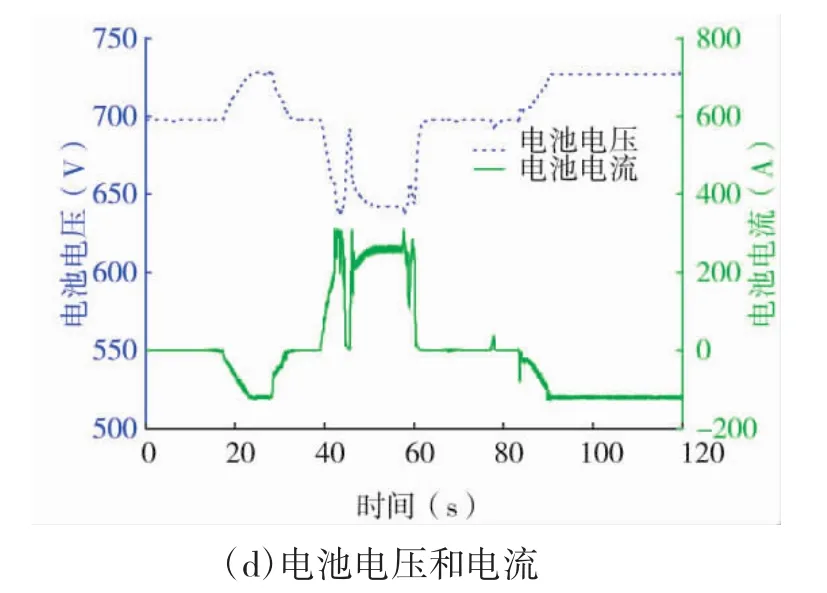
图9 车辆爬坡/下坡仿真结果
在 30 s~32 s、41 s~45 s、55 s~70 s、84 s~85 s和90 s~92 s期间,车辆刚开始爬坡或下坡时,部分驱动轮悬空或滑转,致使负载功率需求波动较大,负载电流毛刺较多,见图9(b)。在系统能量管理策略控制下,超级电容完全起到了“削峰填谷”的作用,确保了EGS和DC/DC的平稳输出,直流母线电压也在700 V~800 V 间波动,见图 9(b)。在 90 s~110 s车辆下坡期间,为了降低车速,确保安全,驾驶员进行了多次制动操作,回收了部分制动能量,将部分车辆动能和势能转化为电化学能存储在超级电容和动力电池中,见图9(c),提升了能量利用率。
5 结论
本文通过构建一种分布式硬件在环仿真平台、设置典型工况,对能量管理策略进行仿真验证。结果表明:混合动力源系统动态响应速度较快,能够满足负载功率需求;发动机沿最佳燃油曲线输出;动力电池工作电流比较平稳并实现了对SOC工作范围的控制;充分发挥了超级电容的快速充放电能力;母线电压在可控范围内波动。
[1]张兵志,陈文英,魏巍,等.未来装甲装备发展需求及全电化技术支撑[C]//长沙:第三届特种车辆全电化技术发展论坛,2014.
[2]阿弗莱克.简析坦克装甲车辆电传动技术[J].现代兵器,2009(12):21-25.
[3]张希,米春亭.车辆能量管理:建模、控制与优化[M].北京:机械工业出版社,2013.
[4]林歆悠,孙冬野,尹燕莉,等.基于随机动态规划的混联式混合动力客车能量管理策略[J].汽车工程,2012,34(9):830-836.
[5]KOU Z T,SONG C Y,PAN Z.MLD-based predictive control of energy management for hybrid electric bus [C]//Beijing:Proceedings of the 10th World Congress on Intelligent Control and Automation,2012:2806-2811.
[6]OPILA D F,WANG X Y,MCGEE R,et al.An energy management controller to optimally trade off fuel economy and drivability for hybrid vehicles[J].IEEE Transactions on Control Systems Tecnology,2012,20(6):1940-1505.
[7]LI S G,SHARKH S M,WALSH F C,et al.Energy and battery management of a plug-in series hybrid electric vehicle using fuzzy logic [J].IEEE Transactionson Vehicular Technology,2011,60(8):3571-3585.
[8]LEE H D,SUI K S.Fuzzy-logic-based torque control strategy for parallel-type hybrid electric vehicle[J].IEEE Transactions on Industrial Electronics,1998,45(4):625-632.
[9]汪超,唐勇奇.基于独立C代码的模糊控制器应用程序设计[J].计算机技术与发展,2009,19(5):242-244.
[10]陈慧勇,吴光强.并联式混合动力汽车的BP网络实时能量管理[J].同济大学学报,2009,37(4):525-530.
[11]BOEHME T J,SCHORI M,FRANK B,et al.A predictive energy management for hybrid vehicles based on optimal control theory [C]//2013 American Control Conference,Washington,DC,2013:5984-5989.
[12]陈建松,陈南,殷国栋,等.基于dSPACE的4WS车辆硬件在环控制仿真研究[J].系统仿真学报,2010,22(7):1622-1626.
[13]颜南明,张豫南,刘春光,等.MATLAB环境下的分布式硬件在环仿真技术研究[J].系统仿真学报,2010,22(8):1866-1869.
[14]王红军,陈佳鑫,邹湘军,等.SimulationX及硬件在环仿真在伺服压力机设计和研究中的应用[J].机械工程学报,2012,48(6):51-56.
[15]何舜,张建文,蔡旭.风电变流器的RT-LAB硬件在环仿真统仿设计与实现[J].电力系统保护与控制,2013,41(23):43-48.
Research on Real-time Simulation of Power Management Strategy in Armored Hybrid Electric Vehicle
XIANG Yu1,2,LIU Chun-guang1,PANG Bin-bin3,LIU Yue-zhan4
(1.Key Laboratory of All-electric Technology,Academy of Armored Force Engineering,Beijing 100072,China;2.Unit 61081 of PLA,Beijing 100094,China;3.Unit 66410 of PLA,Beijing 100042,China;4.Maji Agricultural Service Station,Taihe 236600,China)
To solve optimal matching problem of involved multi power sources of armored hybrid vehicle,according to the characteristics of multi-power output and workload requirements,the energy management strategy with double layered structure is formulated.The top layer of power system distributes strategy complete the load power estimation and distribution between multi-power.The component control strategy to realize optimal control of engine-generator set and batteries.The power management strategy is proved through the simulation of distributed HIL simulation platform.The results indicated that the load requirements is satisfied commendably by hybrid power system.The optimal control of multiple-target is implemented.
electric drive vehicle,hybrid power train system,power management,hardware-in-loop simulation
TM921
A
10.3969/j.issn.1002-0640.2017.07.029
1002-0640(2017)07-0133-06
2016-05-08
2016-06-09
项 宇(1987- ),男,安徽阜阳人,在读博士。研究方向:电传动装甲车辆能量管理技术。
