伺服系统直流调速系统的改进型内模PD-I控制方法
2017-08-28李斯宇赵志涛赵志诚
李斯宇,赵志涛,赵志诚
(1.中国北方工业公司,北京 100053;2.太原科技大学电子信息工程学院,太原 030024)
伺服系统直流调速系统的改进型内模PD-I控制方法
李斯宇1,赵志涛2,赵志诚2
(1.中国北方工业公司,北京 100053;2.太原科技大学电子信息工程学院,太原 030024)
为提高直流调速系统的控制性能,提出了一种改进型内模PD-I控制器的设计方法。根据直流电机的运行原理,建立了电机输出转速与输入电压变化率之间的数学模型,基于内模控制(Internal Model Control,IMC)原理和Taylor级数展开,设计了一种内模PD控制器,且可通过选择系统的截止频率实现控制器参数的整定。为了获得系统调节所需的控制作用,可将内模PD控制器与积分环节相串联构成改进型内模PD-I控制器,仿真和实验结果表明本方法可使系统获得更好的控制性能。
直流调速系统,内模控制,参数整定,截止频率
0 引言
电机作为重要的动力机构,广泛应用于各类机械运动中,对国民经济和生活都有极其重要的作用。PID控制因具有算法简单、易于实现、具有一定鲁棒性的特点而广泛应用于电机控制系统,但是通常的电机控制系统,一般是多变量耦合、非线性时变的复杂对象,其控制往往受到各种干扰的影响,导致常规PID控制难以满足高精度、高性能的控制要求。
如何保证系统具有良好的动静态性能以及对参数变化和外界干扰的不敏感性,一直是控制界研究的热点。近年来,除了PID控制[1-3]外,模糊控制[4-6],神经网络控制[7-8],滑模变结构控制[9-11]、内模控制[12-13]以及各种优化算法[14-16]逐步应用于电机控制中,并且有效提高了系统的控制性能。其中,内模控制因设计原理简单、参数整定直观明了、鲁棒性可在线调整、控制性能优越的特点引起控制界的广泛关注。文献[17]的调速系统采用双闭环结构,其中速度环采用双口内模控制器以改善实际控制中的输入饱和现象,而电流环采用传统PI控制器,并且系统中采用负载观测器和一种线性自适应控制规律以提高系统的抗扰性,再结合模糊控制原理,虽然取得了优异的控制性能,但该控制方案对系统的硬件和软件要求较高。文献[18]将一种免疫算法引入到内模控制中,实现了滤波时间常数的在线调整,将其应用于感应电机中获得良好的控制效果,但引入的优化算法较复杂,且其跟踪性能还需进一步提高。文献[19]根据内模控制器中唯一可调参数与控制性能的关系,制定了模糊控制规则,设计出模糊内模PID控制器,将其应用于交流伺服系统中。
为提高调速系统的控制性能,针对直流电机,本文建立了转速与电压变化率的数学模型,然后根据内模控制原理设计出内模PD控制器,再将其与积分环节相串联,设计出一种改进型内模PD-I控制器,该控制器能够根据电机的运行情况,首先调整控制电压的变化率,进而获得用于系统调节的电压控制信号。仿真和实验结果表明了本文方法的优越性。
1 直流电机的数学模型
忽略调速系统中存在的电机参数、外部负载的时变性,非线性摩擦以及模型中不可预测的不确定项,得直流伺服电机数学模型为:

式中,u为电枢电压,Ce为电势系数,R为电枢电阻,i为电枢电流,Cm为转矩常数,Te为电磁转矩,TL为负载转矩,J为转动惯量,ω为转子机械角速度,B系统粘滞摩擦系数。
将式(1)、式(3)代入式(2)得

式中,a=(CmCe+BR)/(JR),b=Cm/(JR),c=1/J。在不考虑负载的情况下,对式(4)左右进行求导得


式中,K=b/a为电机的开环增益,T=1/a为电机的时间常数。
2 改进型内模PD-I控制器设计
考虑式(7)所示电机模型,根据内模控制原理[19],设计内模控制器CIMC(s)为

式中,G2-(s)为模型G2(s)中的最小相位部分,f(s)为低通滤波器。
为了便于实际应用,通常将内模控制等效变换为反馈控制结构,相应的反馈控制器C(s)为

根据式(7)所示模型选择低通滤波器f(s)为

式中,λ为滤波器时间常数。结合式(8)、式(9)设计反馈控制器为

为了将式(11)转化为PID控制器的形式,此处采用Taylor级数展开的方法。由式(11)得


可得N(s)以及其一阶、二阶导数在s=0处的值分别为
若控制器C(s)采用标准PID控制器的形式,即

则对应的比例系数kp,积分系数ki和微分系数kd分别为

由于 N(0)=0,C(s)实际上为 PD 控制器,且仅有一个可调参数,该参数与系统的动态响应性能及鲁棒性能直接相关。另由式(7)所示数学模型可以看出,IMC-PD控制器C(s)的输出为控制电压的导数,因此,需将其积分后才能得到用于电机转速调节的控制信号,从而构成改进型的IMC PD-I控制器。直流调速系统改进型IMC PD-I控制的结构如图1所示,其中r为转速设定值,ω为电机输出转速,TL为负载转矩。
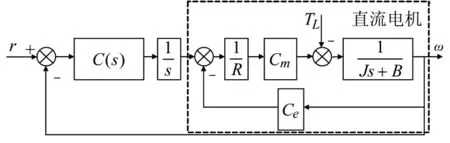
图1 直流调速系统改进型IMC PD-I控制结构
3 控制器参数整定
由图1的控制结构可以得到系统的开环传递函数 L(s)为

由频域分析方法可知,当系统的响应频率ω取截止频率ωc时,满足
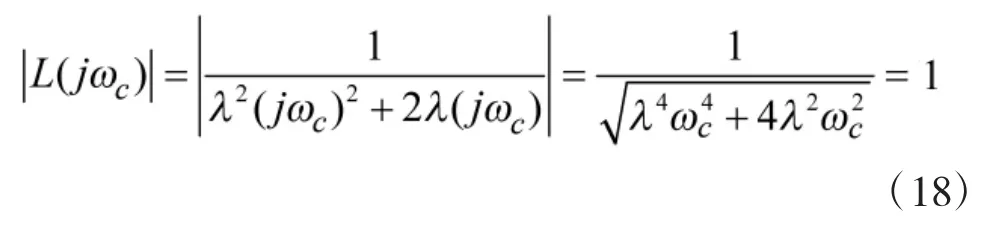
由式(18)可以得到

由式(19)可以看出,控制器参数λ仅与ωc相关,λ越小,ωc越大,即系统的响应速度越快。
4 仿真和实验分析
为了验证本文方法的有效性,分别利用MATLAB和QStudioRP实验平台进行仿真分析与实验验证,被控对象选用Quanser公司的MicroMo Coreless无芯电机,电机参数如表1所示。

表1 电机参数
根据电机参数得电机输出转速与输入电压及电压变化率的数学模型分别为

针对式(21)所示模型,利用本方法设计内模PD控制器为

然后将该控制器的输出经过积分后作为控制信号,选择截止频率ωc=16 Hz,则λ=0.004 83。
另外,根据文献[20]可得调速系统常用的传统PI控制器为

同样选择截止频率ωc=16 Hz,同时选择相位裕度φm=70 °,则得 kp=0.282,ki=28.2。
设控制系统的给定值r=20(t),负载扰动TL=0.02(t-2)N·m。本文方法、传统PI控制方法的转速响应的仿真结果如图2所示,可见本文方法和传统PI控制的调节时间相差不大,但传统PI控制方法存在10.6%的超调,且干扰抑制性能明显不如本文方法。
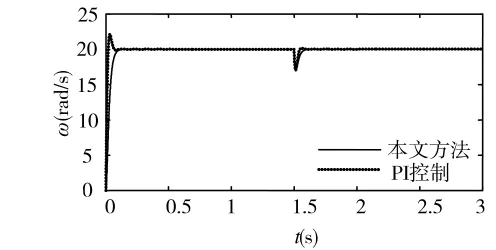
图2 标称系统的阶跃响应

图3 摄动系统的阶跃响应
为验证本文方法的鲁棒性,令K,T分别摄动+30%,即 K=7.839,T=0.028 47,则本文方法、传统PI控制方法的转速响应仿真结果如图3所示,可以看出本文方法几乎不受参数变化的影响,但传统PI控制方法出现了15.35%的超调,因此,本文方法具有更好的鲁棒性。
将本文设计的控制器应用于基于QstudioRP实验平台的直流调速系统中,系统的实物连接如图4所示,给定转速r=20 rad/s,在t=1 s时,加入旋转机械负载,系统采样周期设置为0.001 s。本文方法和传统PI控制方法的转速响应曲线如图5、图6所示,可见本文方法具有更好的控制性能。
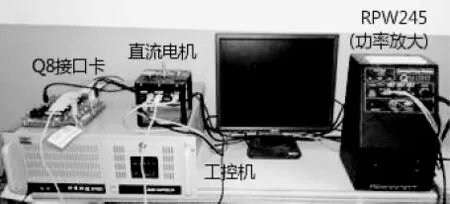
图4 直流调速系统硬件连接
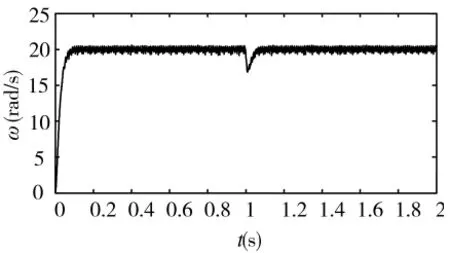
图5 改进型内模控制系统转速响应曲线

图6 传统PI控制系统的转速响应曲线
5 结论
本文针对直流调速系统,首先建立了输出转速与输入电压变化率的数学模型,然后根据内模控制原理和Taylor级数展开,设计了IMC PD控制器,由于其输出为控制电压的变化率,因此,将其与积分环节相串联,从而得到一种改进型的IMC PD-I控制器,该控制器仅有一个可调参数,且可以根据系统的截止频率进行参数整定。仿真和实验结果表明,本文方法可使系统具有更好的响应性能和较强的鲁棒性。
[1]JAN R,TSENG C,LIU R.Robust PID control design for permanentmagnetsynchronous motor:a genetic approach[J].ElectricPowerSystemsResearch,2008,78(7):1161–1168.
[2]SU X D,LUO Q S,ZHI W.Improved single-neuron PID controller for DC motor applied in robot system[J].Journal of Beijing Institute of Technology,2012,21(4):472-478.
[3]RAJASEKHAR A,JATOTH R K,ABRAHAM A.Design of intelligent PID/PIλD;speed controller for chopper fed DC motor drive using opposition based artificial bee colony algorithm [J].Engineering Applications ofArtificial Intelligence,2014,29(3):13–32.
[4]LI H,MONTI A,PONCI F.A fuzzy-based sensor validation strategy for AC motor drives [J].IEEE Transactions on Industrial Informatics,2012,8(4):839-848.
[5]林国余,王东.一种基于模糊PID的AFS电机控制方法[J].微计算机信息,2011,27(10):1-3.
[6]杨泽斌,汪明涛,孙晓东.基于自适应模糊神经网络的无轴承异步电机控制[J].农业工程学报,2014,30(2):78-86.
[7]SUN X,CHEN L,YANG Z,et al.Speed-sensorless vector control of a bearingless induction motor with artificial neural network inverse speed observer[J].IEEE Transactions on Mechatronics,2013,18(4):1357-1366.
[8]El-SOUSY F F M.Intelligent optimal recurrent wavelet Elman neural network control system for permanent-magnet synchronous motor servo drive [J].IEEE Transactions on Industrial Informatics,2013,9(4):1986-2003.
[9]ZHANG B T,PI Y G,LUO Y.Fractional order sliding-mode control based on parameters auto-tuning for velocity control of permanent magnet synchronous motor[J].ISA Transactions,2012,51(5):649-656.
[10]FURAT M,EKER.Second-order integral sliding-mode control with experimental application [J].ISA Transactions,2014,53(5):1661-1669.
[11]胡强晖,胡勤丰.全局滑模控制在永磁同步电机位置伺服中的应用[J].中国电机工程学报,2011,31(18):61-66.
[12]FLAH A,SBITA L.A novel IMC controller based on bacterial foraging optimization algorithm applied to a high speed range PMSM drive[J].Applied Intelligence,2013,38(1):114-129.
[13]NGHIA D H,NHO N V,BAC N X,et al.Real time control of an induction motor using IMC approach [J].Journal of Power Electronics,2009,9(3):456-463.
[14]任志斌,谢阳萍,肖宇连.基于粒子群算法的永磁同步电机控制系统研制[J].微电机,2013,46(12):39-41.
[15]TSAI C,LIN C,HUANG C.Microbrushless DC motor control design based on real-coded structural genetic algorithm[J].IEEETransactionsonMechatronics,2011,16(1):151-159.
[16]王光辉,陈杰,蔡涛.多目标分解随机粒子群优化算法及其在直线电机优化设计中的应用[J].控制理论与应用,2013,30(6):693-701.
[17]LI S,GU H.Fuzzy adaptive internal model control schemes for PMSM speed-regulation system [J].IEEE Transactions on Industrial Informatics,2012,8(4):767-779.
[18]尹忠刚,牛剑博,钟彦儒.采用免疫算法的感应电机内模控制策略[J].中国电机工程学报,2013,33(24):97-105.
[19]赵志诚,贾彦斌,张井岗.交流伺服系统模糊内模PID控制器设计[J].火力与指挥控制,2008,33(11):144-146,151.
[20]王莉娜,朱鸿悦,杨宗军.永磁同步电动机调速系统PI控制器参数整定方法[J].电工技术学报,2014,29(5):104-117.
Improved IMC PD-I Control Method for DC Speed Regulating System
LI Si-yu1,ZHAO Zhi-tao2,ZHAO Zhi-cheng2
(1.China North Industries Corporation,Beijing 100053,China;2.School of Electronic Information Engineering,Taiyuan University of Science and Technology,Taiyuan 030024,China)
In order to improve the control performance of DC speed regulating system,a modified design method of PD-I controller based on Internal Model Control(IMC)is proposed in this paper.According to the operation principle of the DC motor,the mathematical model between the output speed and the change rate of the input voltage of the motor was established.Then,on the basis of IMC principle and Taylor series expansion,the IMC PD controller was designed,and the tuning of controller parameter could be realized by selecting the cut-off frequency of the system.To obtain the control signal of the system regulation,the IMC PD controller should connect a integrator in series to form the improved IMC PD-I controller.The simulation and experimental results show that the proposed method could make system have better performance.
DC speed regulating system,internal model control,parameter tuning,cut-off frequency
TP273
A
10.3969/j.issn.1002-0640.2017.07.020
1002-0640(2017)07-0090-04
2016-08-05
2016-10-17
李斯宇(1990- ),男,河南信阳人,硕士,工程师。研究方向:火控伺服系统设计、先进控制技术。
