基于改进ESO的交流伺服系统FOPID定位控制
2017-08-28汤巧戈侯远龙
汤巧戈,高 强,李 林,侯远龙,孙 浩
(1.南京理工大学机械工程学院,南京 210094;2.北方自动控制技术研究所,太原 030006)
基于改进ESO的交流伺服系统FOPID定位控制
汤巧戈1,高 强1,李 林2,侯远龙1,孙 浩1
(1.南京理工大学机械工程学院,南京 210094;2.北方自动控制技术研究所,太原 030006)
针对高炮炮控交流伺服系统高精度定位控制存在的外界干扰及诸多非线性因素,提出了基于连续光滑函数fan()的改进扩张状态观测器(ESO),并将其应用于分数阶PID控制器,即CS-ESO-FOPID。该控制器将所有外界干扰因素作为“总干扰”获取干扰实时量,并通过改进扩张状态观测器实现非线性因素的实时动态补偿。数字仿真证明,CS-ESO观测优于传统ESO观测,CS-ESO-FOPID的动态控制精度及对外部扰动的鲁棒性均优于FOPID控制,避免了基于传统ESO的分数阶PID易出现的高频颤振现象,从而验证了该控制策略的可行性和有效性。
高精度定位,交流伺服系统,分数阶PID控制,改进扩张状态观测器
0 引言
高炮随动系统在高炮方位射向和俯仰射角的高精度自动瞄准两方面有着较为广泛的应用,对高炮的快速反应能力和操瞄自动化程度有着巨大的提升作用。随着目标探测技术的发展,高炮身管的高精度定位及连续快速打击需求已成为必然的发展趋势[1-2]。
针对身管运动系统存在的分数阶动力学特征,考虑到初始运动误差及随机扰动,采用分数阶PID型控制器实现身管运动的时域控制。国内外学者研究结果证明:分数阶系统模型可较精确描述动态系统的特征,且对外界干扰不敏感,在非线性运动控制中具有更好地控制性能[3-4]。刘忠等[5]在导弹俯仰控制系统分数阶控制器的基础之上采用了粒子群优化(PSO)算法整定分数阶控制器参数,证明了基于优化结构的分数阶控制策略具有较好的控制效果。
中国科学院韩京清的自抗扰控制器(ADRC),其独立于系统模型,用过程误差消除误差的方法,利用扩张状态观测器(ESO)实时计算“总扰动”,获取控制对象的内、外扰的实时作用量,实时动态反馈补偿,实现系统线性化,将非线性反馈控制律(NLSEF)用于抑制补偿残差,提高了控制性能[6]。朱东旭等[7]在炮控系统中将摩擦扰动和未建模动态作为综合扰动项,对于系统的外部扰动采用自抗扰技术直接抑制,然后使用扩张状态观测器,它在控制器中的应用能够对总扰动进行观测并予以补偿。研究结果表明,传统PID控制结合ESO,能够克服炮控系统出现的低速爬行现象,跟踪精度得到了较大提高,系统的抗扰能力及鲁棒性被提高和改善,ESO-PID在炮控系统的应用为武器系统如何提高控制精度的问题提供了一种较新的解决办法。
结合以上方法,在基于ESO优点的基础上构造了fan()函数,设计了基于连续光滑fan()函数的改进扩张状态观测器(Continuous and Smooth ESO,即CS-ESO),并将该改进扩张状态观测器结合分数阶PID控制器。由FOPID计算主控制量,由CS-ESO产生补偿控制量,以实现非线性因素的动态补偿。
1 高炮交流伺服系统
高炮炮控交流伺服系统框图如图1所示。
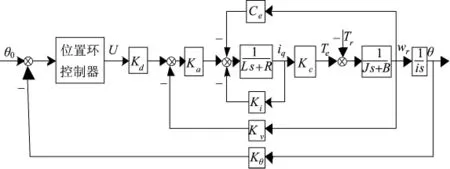
图1 高炮炮控交流伺服系统结构图
图中:θ0为高炮目标位置;θ为高炮转角;U为定位控制电压;Ka为PWM功率放大倍数;Kd为速度环放大倍数;Kc为电机转矩系数;Ki为电流反馈系数;Kv为速度反馈系数;Kθ为位置反馈系数;Ce为电动机反电势常数;L为电动机电枢电感;s为拉普拉斯算子;R为线圈电阻;iq为定子电流;Te为电磁转矩;Tr为扰动力矩(摩擦力矩和耦合力矩);J为转动惯量,J=Jm+JL,Jm为电机转动惯量,JL为折算到输出轴上的转动惯量;B为黏性阻尼系数,B=bm+bL,bm为电机黏性阻尼系数,bL为负载黏性阻尼系数;wr电机的输出轴角速度;i为减速比。
由于电流环相对于速度环和位置环是整个伺服系统的最内环,截止频率最低,因此,电流环可视为比例系数为1的比例环节:

根据炮控交流伺服系统结构框图可知,其电磁转矩:

在磁场定向的控制方式下,Te(t)与iq(t)是线性的,即:

转矩平衡方程为:

结合式(1)~式(4)可得:

式(5)可写为:

则高炮炮控交流伺服系统的空间状态方程为:

式(7)中,

在工作过程中,负载转动惯量、黏性阻尼系数、扰动力矩(摩擦力矩和耦合力矩)等参量有明显不确定性,随工况的变化而变化,具有时变性,可知,高炮炮控交流伺服系统为非线性系统。因此,在结合ESO的优点的基础上进行改进,实时观测系统参数,利用分数阶PID计算控制量,对外界扰动实时在线补偿。
2 分数阶定位控制器设计
2.1 分数阶微积分
分数阶微积分最广泛应用的GL是定义[8]:

在零初值条件下,GL的Laplace变换可写为:

为在频率段(wb,wh)内能高精度的拟合,利用最优算法寻优确定滤波器参数来提高近似精度[9]。
将sα近似为:,其中G为滤波器,GC为Oustaloup滤波器。G的形式为:

为提高幅频和相频的近似精度,把分数阶微积分的实际幅频、相频与近似幅频、相频的积分差作为寻优指标,即:

式(11)中,M1、P1分别为实际的幅频、相频,M2、P2分别为近似算法的幅频、相频。经过寻优使J达到最小值,从而增加了拟合精度,并且方便建立simulink模型。
通过扩张观测器实现对外部扰动和未知不确定性的估计,系统输出产生4个信号z1(t)、z2(t)、z3(t)和z4(t)。其中z1(t)为跟踪输出角度,z2(t)为跟踪输出角速度,z3(t)为跟踪输出角加速度,z4(t)为外部扰动的实时综合估值。设四阶ESO离散型方程对f(t)实时估计观测:

扩张状态观测器为设计控制器的重要环节,但是传统ESO存在着不足:应用fal(e(k),a,δ)的函数连续但非光滑,不仅不能避免高频颤振现象,而且又对线性段区间长度取值敏感[10],增加了控制器设计的难度。

式(13)中,δ为线性段区间长度。
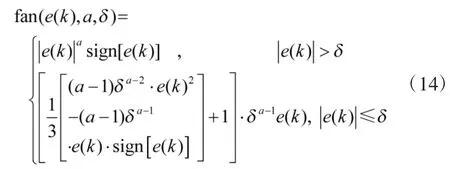
由式(13)知,在原点附近为线性段,可知连续不可导。周振雄等[10-11]证明指出,这种不平滑的特性易引起系统响应高频颤振现象。若δ在线性区间内变动,可避免振荡现象,但若δ取值较小,函数fal(e(k),a,δ)的导数将发生突变,从而导致系统性能变差,产生大的振荡。因此,构造连续可导的函数是解决问题的关键所在,从而设计了非线性函数fan(e(k),a,δ)函数:
令 a=0.25及 δ=0.1,代入式(13)、式(14)中,则fal(e(k),0.25,0.1)函数和 fan(e(k),0.25,0.1)函数图形如图2所示。

图2 fan()函数与fal()函数比较
由图可知,改进fan()函数在零点取值为零,且各点连续光滑,符合设计要求。
从造模成功的大数中选取雌鼠、雄鼠各24只,每组包括雌鼠、雄鼠各4只。造模成功24 h后向大鼠腹腔注射20%乌来糖注射液进行麻醉,剂量为1 ml/100 g。使用无菌注射器在大鼠腹主动脉末端采集5 mL血液标本,在4℃以下条件下进行离心,转速为3000 r/min,时间为10 min,之后取上清液,在-80℃条件下进行保存。
2.3 基于连续光滑ESO的FOPID控制器
结合CS-ESO与FOPID控制,其结构框图如图3所示。

图3 基于连续光滑ESO-FOPID控制框图
图中,θ0(t)为设定目标位置值,θ(t)为炮管实际位置值。
CS-ESO预估未知扰动量,扰动补偿后的实际控制量为:

3 控制器仿真验证
为验证所设计扩张状态观测器的效果,在Matlab里进行仿真分析。经参数设计及大量试验证明,设置参数如表1所示。
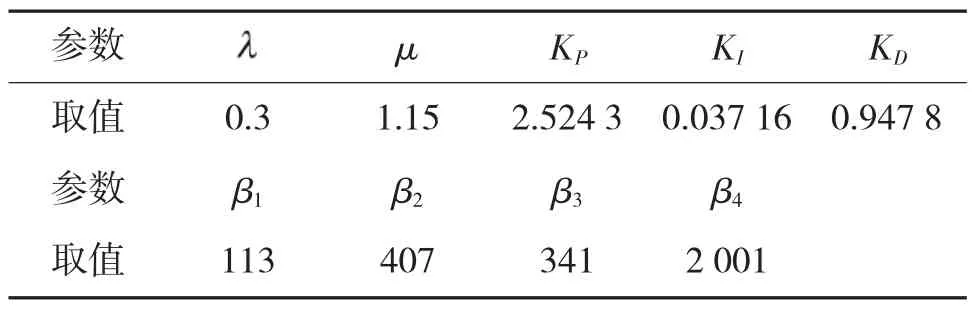
表1 控制变量参数表
3.1 应用函数避免颤振比较
针对式(7)表示的系统及式(12)的离散化方程,把均值0.01,方差0.01的正态随机干扰信号加到控制系统中,并令δ=0.01,采用函数fal(e(k),0.5,δ)及fan(e(k),0.5,δ)形式,对f(t)实时估计,分别如图4和图5所示:

图4 fal(e(k),a,δ)函数实时估计图
由图4可见,fal(e(k),a,δ)函数实时估计产生了微小颤振现象。
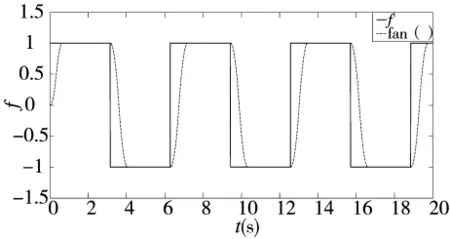
图 5 fan(e(k),a,δ)函数实时估计图
由图 5 可见,基于 fan(e(k),a,δ)函数的扩张状态观测器实时估计效果比较好,没有出现高频颤振的现象,而且即使δ取更小值,仿真结果也是基本稳定不变,并且没有产生颤振现象,表明采用fan(e(k),a,δ)函数能够降低颤振现象产生。
3.2 应用函数对参数δ敏感比较
令δ=0.001,fal(e(k),a,δ)与fan(e(k),a,δ)函数对f(t)的实时估计效果如图6所示:

图6 两函数实时估计图
由图6可见,fal(e(k),a,δ)函数对δ敏感,当δ取值小时,fal(e(k),a,δ)函数导数发生突变,致使破坏系统性能,产生大的振荡,从而控制效果降低。基于 fan(e(k),a,δ)函数的状态观测器,当 δ=0.01、0.001或0.000 1时,仿真结果均基本稳定不变,避免了高频颤振的现象。
3.3 控制器阶跃响应比较
图7为在FOPID控制与CS-ESO-FOPID控制下系统的阶跃响应曲线。从图中可以看出,控制系统均未产生超调量。为了进一步说明控制策略在外界负载扰动下的鲁棒性,将幅值为1 KN·m的正态随机干扰信号加入系统。结果证明,CS-ESO-FOPID控制在1KN·m方波扰动作用时,波动的最大值为0.004 2 rad,明显远小于FOPID控制波动最大值0.025 rad,显然,该控制系统具有较强的鲁棒性。
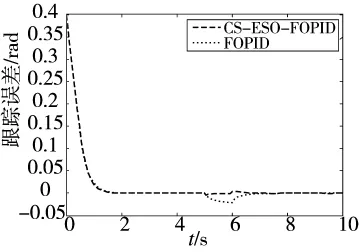
图7 具有方波扰动的阶跃响应误差曲线
3.4 控制器等速跟踪比较

图8 等速跟踪误差比较图
图8为CS-ESO-FOPID与FOPID控制系统下,在系统阶跃跟踪时叠加频率为0.5 Hz,幅值为1 KN·m的正弦扰动曲线,由图8可知,FOPID控制策略下的最大跟踪误差为0.020 rad,CS-ESO-FOPID控制策略下的最大跟踪误差则为0.002 4 rad,跟踪精度相比FOPID提高8倍,系统外部扰动得到有效抑制,CS-ESO-FOPID控制性能更加突出,鲁棒性更强。图9给出了正弦干扰状态下CS-ESO-FOPID控制系统下扰动估计值Z4,可知CS-ESO-FOPID控制系统对扰动的估计较为准确。

图9 正弦扰动及其估计值
通过比较可知在跟踪估计性能上,CS-ESO响应快、无超调、无稳态误差、稳态时间短,而且CS-ESO-FOPID控制系统的跟踪精度明显优越于FOPID控制系统,且对外界扰动具有较强的鲁棒性。
4 结论
针对高炮炮控交流伺服系统的高精度定位控制中存在的外界干扰及诸多非线性因素,提出的改进ESO分数阶PID控制策略,即CS-ESO-FOPID。通过数值仿真证明了该策略的可行性和较强的鲁棒性,有效地避免了高频颤振现象,可实现对未知不确定性和外加干扰的实时在线补偿,使系统实现响应快及控制精度高的特点。
数值仿真表明:当阶跃响应受到方波干扰时,CS-ESO-FOPID控制偏离目标值的最大值约为FOPID控制的16.8%;当等速跟踪受到正弦扰动时,CS-ESO-FOPID控制的跟踪精度比FOPID提高了约8倍;在扰动估计方面,CS-ESO-FOPID控制系统对扰动的估计准确,且曲线平滑;在高频颤振方面,在参数δ取值很小时,CS-ESO-FOPID控制依然能很好地避免高频颤振现象;当系统参数发生摄动时,FOPID控制对参数摄动具有较强的鲁棒性。
[1]康敏,李竞.超远程火炮发展技术[J].火炮发射与控制学报,2001,15(1):59-61.
[2]GAO Q,SUN Z,YANG G L,et al.A novel active disturbance rejection-based control strategy for a gun control system[J].Journal of Mechanical Science and Technology,2012,26(12):4141-4148.
[3]MURESAN C I,FOLEA S,MOIS G,et al.Development and implementation of an FPGA based fractional order controller for a DC motor[J].Mechatronics,2013(23):798-805.
[4]VILLAGRA J,VINAGRE B,TEJADO I.Data-driven fractional PID control:application to DC motors in flexible joints[C]//Proceedings of IFAC conference on advances incontrol,Brescia,2012(2):709-715.
[5]刘忠,赵艳辉.具有优化结构的导弹分数阶控制器设计[J].系统工程与电子技术,2014,36(12):2490-2494.
[6]HAN J Q,From PID to active disturbance rejection control[J].IEEE Transactions on Industrial Electronics,2009,56(3):900-907.
[7]朱东旭,邱晓波,刘家健,等.坦克炮控系统摩擦扰动补偿研究[J].计算机测量与控制,2010,20(1):125-128.
[8]秦昌茂.高超声速飞行器分数阶及自抗扰控制研究[D].哈尔滨:哈尔滨工业大学,2011.
[9]CHEN Y Q,XUE D Y,DOU H F.Fractional calculus and biomimetic control[C]//Proceedings of the 2004 IEEE International Conference on Robotics and Biomimetics,Shenyang,China,2004:901-906.
[10]周振雄,曲永印,杨建东,等.一种改进型实现的机床进给用永磁直线同步电动机调速系统[J].中国机械工程,2008,19(21):2561-2566.
[11]周振雄,曲永印,杨建东,等.采用改进型自抗扰控制器的平面磁轴承悬浮控制[J].电工技术学报,2010,25(6):31-40.
FOPID Positioning Control of Servo System Based on Improved Extended State Observer
TANG Qiao-ge1,GAO Qiang1,LI Lin2,HONG Yuan-long1,SUN Hao1
(1.School of Mechanical Engineering,Nanjing University of Science and Technology,Nanjing 210094,China;2.North Automatic Control Technology Research Institute,Taiyuan 030006,China)
Aiming at High-precision positioning control of the servo system of antiaircraft gun has external disturbance and many nonlinear factors.An improved extended state observer which based on continuous functions(CS-ESO)is presented,and is applied to the fractional order PID controller,which calls CS-ESO-FOPID.All external interference factors are used as the"total interference"to obtain the real-time disturbance,and real time dynamic compensation of nonlinear factors by improved extended state observer is implanted.Through digital simulation CS-ESO,observation is superior to the traditional ESO observation,and CS-ESO-FOPID strategy dynamic control precision and robust are better than FOPID strategy.This new strategy avoids the high frequency flutter phenomenon which the traditional is ESO-FOPID easy to produce.Accordingly,the feasibility and effectiveness of the control strategy are verified.
high-precision positioning,servo system,fractional ordercontroller,improved extended state observe
TP273
A
10.3969/j.issn.1002-0640.2017.07.018
1002-0640(2017)07-0081-05
2016-05-10
2016-08-15
汤巧戈(1991- ),女,山东菏泽人,硕士研究生。研究方向:智能检测与控制。
