某型号舰载三坐标雷达方位转台的设计
2017-08-16周晨龙
周晨龙 余 涛
(中国电子科技集团公司第二十研究所 西安 710068)
某型号舰载三坐标雷达方位转台的设计
周晨龙 余 涛
(中国电子科技集团公司第二十研究所 西安 710068)
本文根据某型号舰载三坐标雷达结构的设计要求,对雷达方位转台结构进行了设计、分析,对传动部分进行了载荷计算及电机、减速机的选型,最后利用ANSYS-workbench有限元分析软件对方位转台的主要结构件进行了力学仿真分析。
方位转台;结构设计;ANSYS-workbench
0 引言
三坐标雷达因其能测量目标的三维位置参数(仰角/高度、方位、距离),对空中目标的探测有着明显的优势,且便于与武器系统配合对空中目标进行打击,已成为替代两坐标雷达成为舰载雷达发展的主流趋势。
方位转台是某三坐标雷达系统重要组成部分,主要功能是天线的支撑和定向装置,通过控制系统,使天线能够按照预定的规律或者跟随目标运动,准确地指向目标;并且通过它精确地测出目标的方位。同时,方位转台作为主要受力机构,承受着来自天线等的自重和转台转动过程中的冲击载荷。本文着重从满足系统性能、技术指标和力学性能等方面展开分析、设计和仿真等工作。
1 主要性能和技术指标
1)转台承受的载荷
天线重量:443kg
2)天线方位工作要求
a)30±1rpm匀速连续转动
b)15±0.5rpm匀速连续转动
3)最大角加速度:0.21 rad/s2
4)方位转台重量:≤350kg
5)连续工作时间:≥24h
6)环境适应要求
在满足GJB403A-98《舰载雷达通用规范》标准的前提下,着重考虑风载荷。风载荷:相对风速45m/s能正常工作,相对风速为60m/s时不损坏。
2 方位转台总体设计
根据三坐标雷达对方位转台的上述性能及指标要求,同时考虑到方位转台对雷达整机的工作精度、制造成本、制造周期、可维修性以及可靠性等要求,经过分析、初步设计、仿真验证、再设计等多次优化,最终确定出方位转台总体结构,其结构如图1所示。
方位转台采用电机带动减速机及一级齿轮传动的形式,主要由杯型件、轴承、旋转变压器、方位壳体、汇流环、伺服电机、减速机、小齿轮和大齿轮等组成。方位壳体作为整个转台的基础支撑,杯型件通过安装在方位壳体上的转动轴承带动其上方的雷达天线转动;工作时,电机输出动力经安装于方位壳体下部的减速机减速后,通过安装在减速机输出轴上的小齿轮传递给安装在杯型件上的大齿轮转动,最终大齿轮带动杯型件及杯型件上部安装的雷达天线转动,同时安装于杯型件及方位壳体上的旋转变压器实时将转台转动的角度信息反馈给控制系统,控制系统按照要求及反馈信息实现转台的既定转动。
为了提高转台的维修性,以便于安装和后期保障维修,电机、减速器采用端面止口定位安装于方位壳体外部,汇流环通过法兰盘安装在方位壳体底部,并且旋转中心与杯型件旋转中心重合。
2.1 方位支撑结构的设计
方位转台主要由方位壳体、杯型件和轴承等组成。杯型件和方位壳体都受轴向力、径向力、驱动反作用力和倾覆力矩的作用,方位壳体下部安装有重量较大的汇流环、减速机及电机,受力情况严酷且复杂,同时,旋转变压器工作时对安装精度要求比较高,而定子和转子又分别安装在方位壳体和杯型件上,所以必须减小杯型件和方位壳体在工作中变形,以确保旋转变压器的工作精度。
借鉴以往产品设计经验,将方位壳体和杯型件的结构设计如图2、3所示结构型式,该结构紧凑、刚性好、强度高,可以满足转台尺寸要求及受力要求,易于保证轴系精度[4]。
2.2 动力传动部分相关计算和选型
2.2.1 方位输出力矩的确定[1][3]
方位输出力矩主要是由风力矩、载荷和摩擦载荷组成。
(1)风力矩
天线转动时受到动态风力矩由静态风力矩和转动风力矩两部分组成,计算如下:
其中:q = 1/2ρv2(ρ 为空气密度,v为工作风速45m/s)
ω—为方位旋转角速度(rad/s);
l—为天线特征尺寸(m);
A1—为天线正面积(m2);
CX—为风力矩系数;
CM—为天线风阻力系数;
通过计算,方位部分所受的风力矩为145.5kg·m。
(2)惯性载荷
通过理论分析和预估,确定出天线转动部分折合到方位轴上的方位轴上的惯性载荷为M惯性为6.73kg·m。
(3)摩擦载荷
天线转动部分所受摩擦载荷包括密封装置的摩擦力矩、方位轴承的摩擦力矩、汇流环的摩擦力矩和不平衡力矩,根据估算或实际测试获得摩擦载荷M摩擦为11.1kg·m。
综上所述,方位轴上所受的总载荷为:
M=Mr+M惯性+M摩擦=163.3 kg·m
2.2.2 齿轮传动设计
根据传动部分对齿轮传动比的要求,设计传动比为i=3.23,小齿轮齿数为Z1=39,大齿轮齿数为齿轮模数Z2=i·Z1=126,取模数m=3,则小齿轮的分度圆直径d1=Z1·m=117mm,大齿轮的分度圆直径d2=Z2·m=378mm。根据相关设计公式[2],小齿轮齿轮弯曲应力为:
式中:KF—弯曲疲劳强度计算的载荷系数,查表[2]取值1.72;
Ft1—齿轮的圆周力,Ft1=2M/d1≈8640N;
b—齿宽,b=60mm;
m— 模数,m=3;
YFa—齿形系数,YFa=2.18;
计算得:δ 180MPa。
同理:计算出大齿轮齿轮弯曲应力δ 50 Mpa。
根据计算出的齿轮的弯曲应力,选择小齿轮材料为40Cr,大齿轮材料为45钢,小齿轮热处理采用调质280HBS,大齿轮热处理采用调质240HBS,根据设计手册,小齿轮和大齿轮的弯曲强度极限分别为500 MPa和380 MPa。
所以,小齿轮弯曲应力≤500MPa;大齿轮弯曲应力≤380MPa,均符合设计要求。
小齿轮的接触应力为:
式中:KFX—接触疲劳强度计算的载荷系数,查表[2]取1.72;
u—齿数比,u=3.23;
—节点区域系数,取1.9;
—材料弹性系数,取189.8M;
—接触强度计算的重合度系数,取0.8;
经过计算得:小齿轮的接触应力 =482MPa;
同理:大齿轮的接触应力 =255MPa。
小齿轮的接触许用应力为:
式中:— 接触疲劳极限应力,查表[2]取600 MPa;
—接触强度计算的寿命系数,0.9;
—润滑油膜影响系数,取0.8;
—工作硬化系数,取1.3;
—强度计算的尺寸系数,取1;
—接触强度最小安全系数,取1。
经计算,小齿轮的接触许用应力 =562MPa;
同理,大齿轮的接触许用应力=514 MPa;
所以,符合设计要求。
2.2.3 电机和减速机的选型
经过相关分析和计算,电机和减速机相关参数如表1所示:

表1 电机和减速机相关参数
3 主要结构件力学仿真分析
根据上文的分析及计算,方位壳体和杯型件受力比较大,结构比较复杂,出现结构破坏后可能造成比较严重的安全事故,所以有必要对方位壳体和杯型件进行力学仿真分析校核。
使用ZL101A-T6铸造加工实现,其相关参数为:
抗拉强度275Mpa;延伸率≥2%;
硬度HBS:80;
弹性模量:E=70Gpa
材料密度:ρ=2.7×103kg/m3
泊松比:ν=0.3。
根据上文相关分析计算可得,方位壳体和杯型件受力如图4和表2所示:
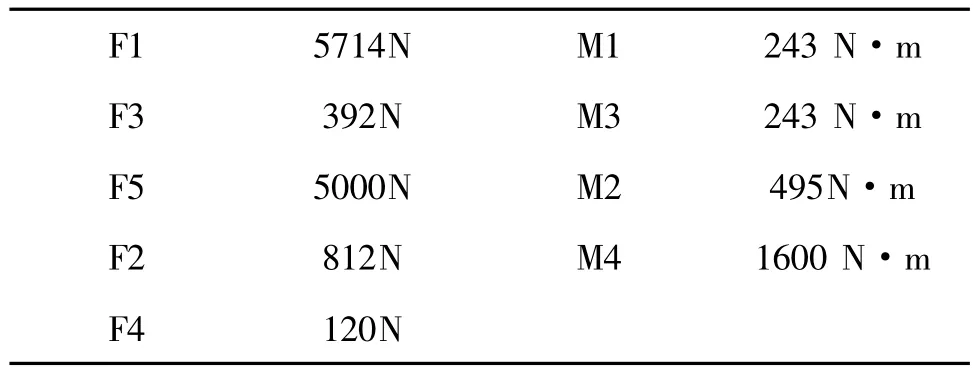
表2 方位壳体和杯型件受力大小
同时根据设计要求,雷达天线必须满足一定的振动要求,最大加速度为10g。根据实际受力情况利用Ansys-workbench软件[5]进行仿真分析,经过多次的仿真分析及相关部分结构的设计改进,最终获得方位壳体和杯型件的受力情况分别如图5、图6所示。
由图可知方位壳体最大应力为12.05MPa,杯型件最大应力为24.14MPa,都小于抗拉强度275Mpa,符合设计要求。
4 总结
本文对某型舰载三坐标雷达方位转台结构及传动系统进行了分析设计,对其承受的主要载荷进行了计算,同时应用ANSYS-workbench软件对其主要受力件方位壳体和杯型件进行了结构强度仿真分析校核,满足设计要求,取得了预期的设计效果。
[1]张润逵.雷达结构与工艺(上册)[M].北京:电子工业出版社,2007.
[2]濮良贵,纪名刚编.机械设计[M].北京:高等教育出版社,1996.
[3]龚振邦.伺服机械传动装置[M].北京:国防工业出版社,1979.
[4]吴迤.测量雷达天线座轴系精度分析[J].电子机械工程,2001.(3):41-43.
[5]陈玉振.基于ANSYS的雷达结构强度分析[J].电子机械工程,2001.27(1):41-43.
Design of Azimuth Turntable for Ship-Borne 3D Radar
Zhou Chenlong,Yu Tao
(The No.20 Research Institute of CETC,Xi'an 710068)
Based on design requirements to a ship-borne three-coordinate(3D)radar,radar azimuth turntable structure is analyzed and designed.Load at transmission is calculated;and type of drive motor and decelerator are selected.Mechanical simulation analysis to the main structural parts of the azimuth turntable is conducted by using ANSYS-workbench finite element analysis software.
azimuth turntable;structural design;ANSYS-workbench
TN95
A
1008-8652(2017)01-060-04
2016-02-05
周晨龙(1988-),男,硕士研究生。主要研究方向为电子信息技术。