基于残差χ2检测方法的联邦卡尔曼滤波
2017-08-07周姜滨刘运鹏
李 腾 周姜滨 刘运鹏
北京航天自动控制研究所,北京100854
基于残差χ2检测方法的联邦卡尔曼滤波
李 腾 周姜滨 刘运鹏
北京航天自动控制研究所,北京100854

针对可重复使用亚轨道飞行器(SRLV)惯性/多传感器组合导航中某导航系统发生故障导致卡尔曼滤波器出现发散,提出了一种基于残差χ2检测方法的联邦卡尔曼滤波。该方法通过对残差均值的检验来确定系统是否发生故障并进行隔离。实验结果表明,基于残差χ2检测方法的联邦卡尔曼滤波能有效检验出系统故障,提高组合导航系统的可靠性。 关键词 残差χ2
各种导航系统单独使用很难满足导航性能要求,而提高导航系统整体性能的有效途径是采用组合导航技术[1]。对于可重复使用亚轨道飞行器,各个飞行段结合不同的辅助导航设备,构成多余度的惯性/多传感器组合导航系统,以同时满足各个飞行阶段的导航精度要求及各种限制条件。
联邦卡尔曼滤波是一种信息融合技术,其基本思想是先分散处理,再全局融合。通过对各传感器建立若干子滤波器,获得建立在子滤波器局部测量基础上的局部最优估计,这些局部最优估计在主滤波器内按融合算法合成,从而获得建立在所有量测量基础上的全局估计[2-3]。然而,在可重复使用亚轨道飞行器组合导航过程中,系统可能会发生硬故障(GNSS信号受遮挡等),导致导航结果偏差过大,可能造成卡尔曼滤波器出现发散现象。
针对系统故障问题,本文提出了一种基于残差χ2检测方法[4]的联邦卡尔曼滤波,即利用对残差均值的检验来确定系统是否发生故障并进行隔离,以有效提高组合导航系统的稳定性与可靠性。
1 联邦卡尔曼滤波器算法
设系统的离散型状态方程为:
Xk=Φk,k-1Xk-1+Wk-1
(1)
设有n个传感器对系统进行独立测量,相应的有n个子滤波器,每个子滤波器均可独立地完成滤波计算。第i个子滤波器的状态方程和量测方程为:
Xik=Φik,k-1Xik-1+Wik-1
Zik=HikXik+Vik
(2)
假定主滤波器和各子滤波器的状态及其状态转移矩阵都相同,即Φik,k-1=Φk,k-1,此时联邦卡尔曼滤波的主要过程和算法如下:
1)状态重置和“信息分配”
重置状态,同时将状态方程信息和状态估计信息通过“信息分配系数”分配到各个子滤波器和主滤波器中,即
(3)
其中,“信息分配”要满足“信息守恒”原则[5]
(4)
“信息分配”影响联邦卡尔曼滤波器的性能,为了提高滤波精度,通过实时提取各局部滤波器和主滤波器得到的协方差矩阵的迹来确定“信息分配系数”
(5)
2)时间更新
各个子滤波器和主滤波器独立进行时间更新
(6)
3)量测更新
(7)
4)信息融合
将各个子滤波器和主滤波器得到的估计和协方差阵融合,得到全局估计和协方差阵
(8)
2 基于残差χ2检测方法的联邦卡尔曼滤波
可重复使用亚轨道飞行器组合导航系统以捷联惯性导航系统输出的导航参数XI的误差δXI为滤波器的主要状态。
2.1 组合导航系统模型
导航坐标系取为发射点惯性坐标系,建立状态方程为:

(9)
其中,系统状态向量X=[δXδYδZδVxδVy

W=[axayazωxωyωz]T
(10)

对于GNSS,DGPS等子系统,将其导航误差考虑为白噪声,所以不把误差状态引入到模型中,只在测量方程中考虑导航误差,即有
(11)
满足
Xi=X
Ai=A
Bi=B
Wi=W
(12)
量测向量为
(13)
其中,Xdh_i,Ydh_i,Zdh_i,Vxdh_i,Vydh_i,Vzdh_i分别为各导航系统的位置、速度导航信息。

2.2 残差χ2检测方法
当导航系统无故障时,卡尔曼滤波器的残差rk是零均值的高斯白噪声,当系统发生故障时,残差rk的均值就不再为0[6],因此,可以通过检验残差rk的均值来确定系统是否发生了故障。在卡尔曼滤波器中,残差为
rk=Zk-HkXk|k-1
(14)
当系统无故障时,卡尔曼滤波器的残差rk是零均值的高斯白噪声,其方差为
(15)
系统发生故障时,残差rk的均值不再为0。根据故障检测的统计原理,对rk作以下二元假设:

H1:有故障E{rk}=μ,
E{(rk-μ)(rk-μ)T}=Ak;
故障检测函数为:
(16)
其中,λk服从自由度为m的χ2分布,即λk~χ2(m)。
取显著性水平为α,则系统故障是否发生的边界条件为:
(17)
若λk≤TD,则判定无故障;若λk>TD,则判定有故障[7],表示导航系统观测量有异常,需进行隔离。
3 仿真分析
为了验证基于残差χ2检测方法的联邦卡尔曼滤波的有效性。本文在可重复使用亚轨道飞行器仿真模型的基础上验证动态条件下组合导航系统的精度。
考虑GNSS和DGPS子系统,组合导航滤波初值如下:
X0=[0,0,0,0,0,0,0,0,0,0,0,0,0,0,0]T,
P0=diag([100,100,100,1.0,1.0,1.0,10-4,10-4,10-4,10-6,10-6,10-6,10-6,10-6,10-6]),
Q=diag([0,0,0,10-8,10-8,10-8,10-6,10-6,10-6,0,0,0,0,0,0]),
R1=diag([225/3,225/3,225/3,0.01/3,0.01/3,0.01/3]),
R2=diag([25/3,25/3,25/3,0.0025/3,0.025/3,
0.025/3])。
在200~210s人为地在GNSS输出导航结果上加60m的位置误差和0.6m/s的速度误差,以模拟GNSS硬故障(突变故障),以考核残差χ2检测方法对硬故障的应对能力。
图1和2是联邦卡尔曼滤波组合导航位置误差和速度误差曲线,图3和4为基于残差χ2检测方法的联邦卡尔曼滤波组合导航位置误差和速度误差曲线。
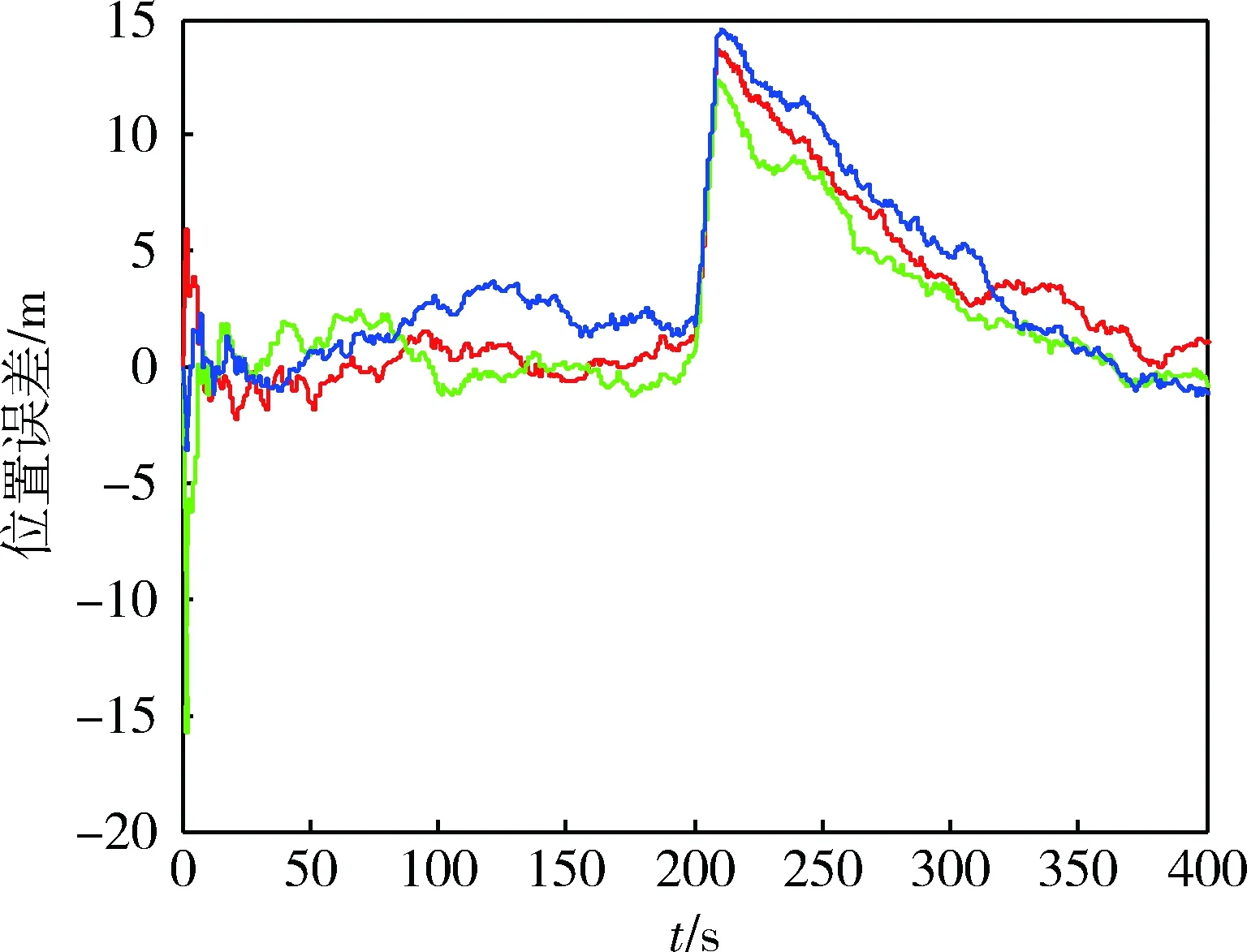
图1 联邦卡尔曼滤波组合导航位置误差
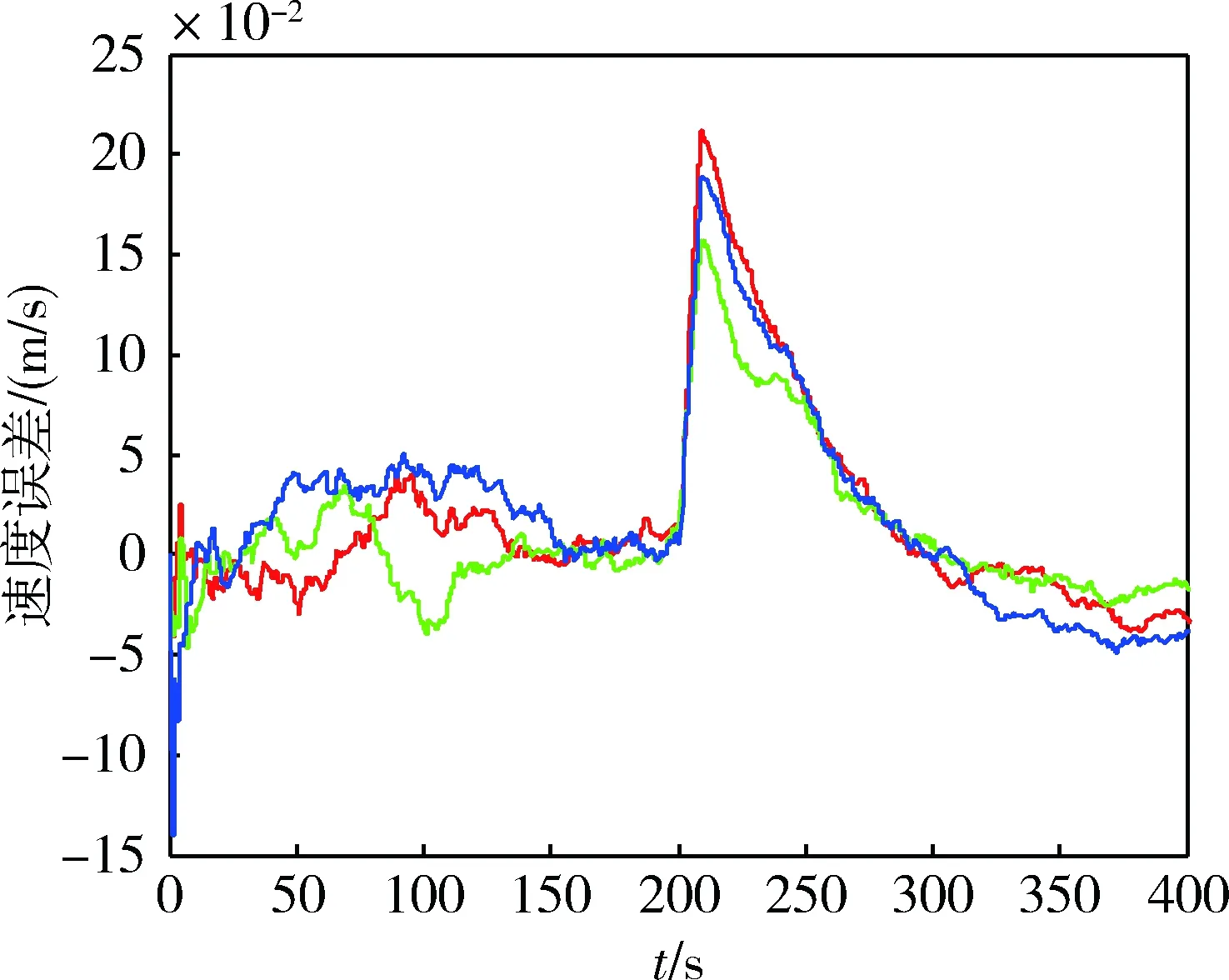
图2 联邦卡尔曼滤波组合导航速度误差
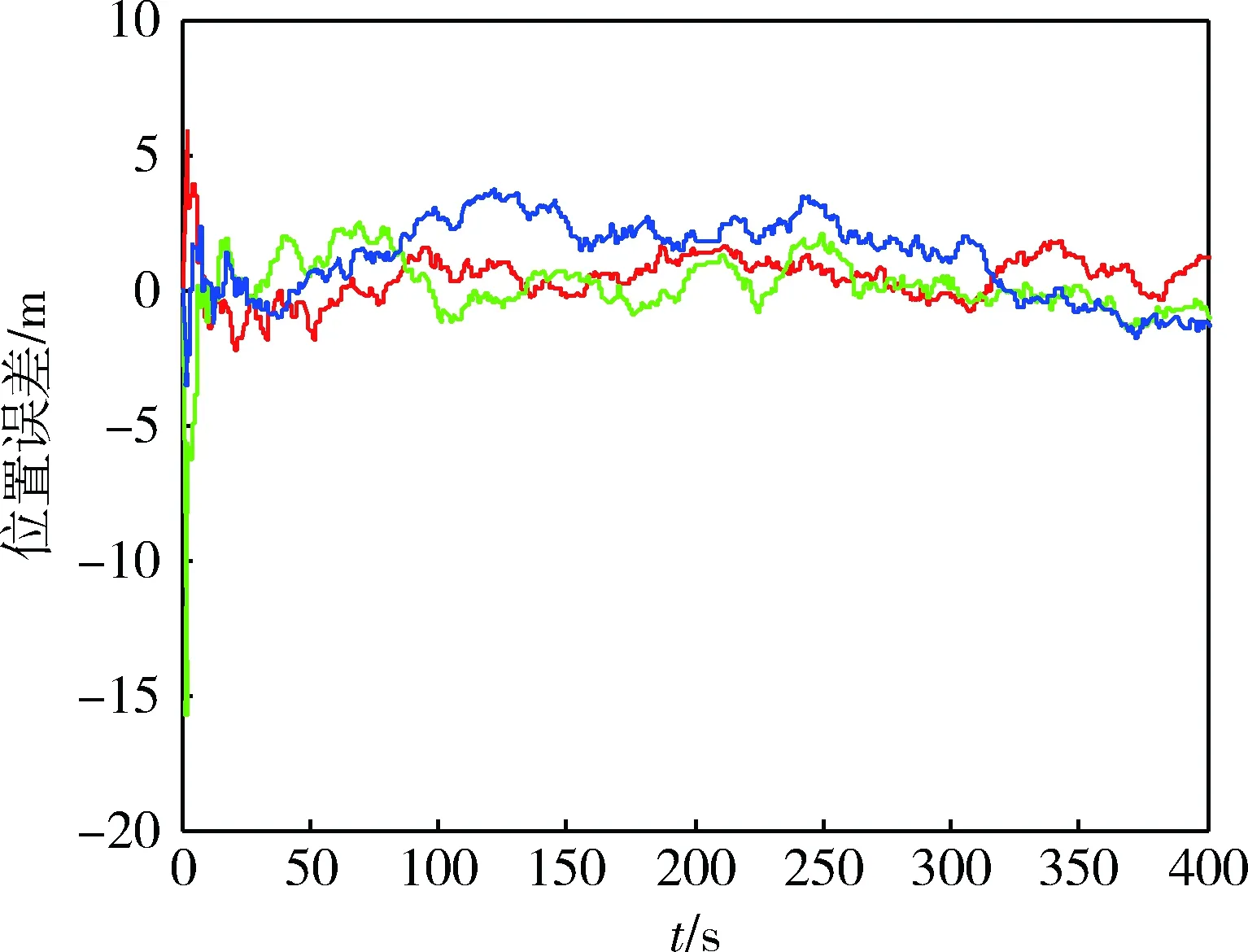
图3 基于残差χ2检测的联邦卡尔曼滤波组合导航位置误差
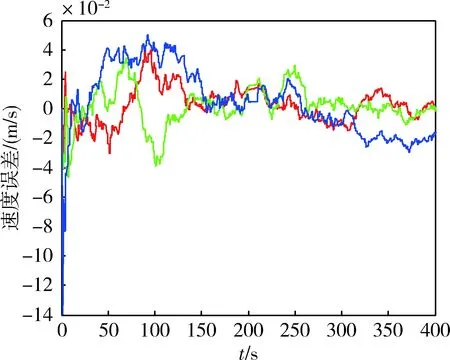
图4 基于残差χ2检测的联邦卡尔曼滤波组合导航速度误差
从仿真结果可以看出,故障出现后,联邦卡尔曼滤波器出现发散现象,组合导航精度下降迅速,且在GNSS故障解除后因受故障GNSS信息的污染导致组合导航滤波收敛缓慢;而基于残差χ2检测方法的联邦卡尔曼滤波能有效检测出GNSS故障并隔离,整个滤波过程平稳,保证了组合导航精度。
4 结论
针对可重复使用亚轨道飞行器组合导航过程中,系统可能会发生硬故障问题,研究了基于残差χ2检测方法的联邦卡尔曼滤波,并进行了仿真验证,取得了较好的故障隔离效果。这说明,基于残差χ2检测方法的联邦卡尔曼滤波能有效检验出系统故障,提高组合导航系统的可靠性。
[1] 袁信, 俞济祥, 陈哲. 导航系统[M]. 北京:航空工业出版社, 1993.
[2] 彭霞, 张彦军, 崔平远. 联邦卡尔曼滤波与集中式卡尔曼滤波的等价性[J]. 青岛科技大学学报, 2005, 26(2):169-172.(PengXia,ZhangYanjun,CuiPingyuan.TheEquivalenceBetweentheCentralizedandFederatedKalmanFilter[J].JournalofQingDaoUniversityofScienceandTechnology, 2005, 26(2): 169-172.)
[3] 张锐, 张长虹, 陈利.INS/GPS导航中联邦卡尔曼滤波算法[J]. 战术导弹控制技术, 2006, 52: 51-55.(ZhangRui,ZhangChanghong,ChenLi.FederatedKalmanFilterAlgorithminINS/GPSIntegratedNavigationSystem[J].ControlTechnologyofTacticalMissile, 2006, 52: 51-55.)
[4] 卞鸿巍, 李安, 覃方君,等. 现代信息融合技术在组合导航中的应用[M]. 北京:国防工业出版社, 2010. (BianHongwei,LiAn,TanFangjun,etal.ApplicationofModernInformationFusionTechnologyinIntegratedNavigation[M].Beijing:NationalDefenseIndustryPress, 2010.)
[5] 秦永元, 张洪, 汪叔华. 卡尔曼滤波与组合导航原理[M]. 西安:西北工业大学出版社, 1998.
[6] 董绪荣, 张守信, 华仲春.GPS/INS组合导航定位及其应用[M]. 长沙:国防科技大学出版社, 1998. (DongXurong,ZhangShouxin,HuaZhongchun.GNS/INSIntegratedNavigationandItsApplication[M].Changsha:NationalDefenseUniversityPress, 1998.)
[7]RenDa.FailureDetectionofDynamicalSystemswiththeStateChi-SquareTest[J].JournalofGuidance,ControlandDynamics, 1994, 17(2): 271-277.
Federal Kalman Filter Based on Residual Chi-Square Test Method
Li Teng, Zhou Jiangbin, Liu Yunpeng
Beijing Aerospace Automatic Control Institute, Beijing 100854, China
AfederalKalmanfilterbasedonresidualchi-squaretestmethodisdevelopedtoaddressthedivergencephenomenonofKalmanfilterduetothefailureofonenavigationsystemwhichinterfereswithinertial/multi-sensorintegratednavigationofsub-orbitalreusablelaunchvehicle(SRLV).Thesystemfailureandinsulationaredeterminedbythetestoftheresidualmeanusedinthisalgorithm.TheresultsshowthatfederalKalmanfilterbasedonresidualchi-squaretestmethodcaneffectivelycheckoutthefailureofasystemandimprovethereliabilityofintegratednavigationsystem.
Residualchi-squaretest;FederalKalmanfilter;Integratednavigation
2016-08-25
李 腾 (1990-),男,江西人,硕士研究生,助理工程师,主要研究方向为导航、制导与控制;周姜滨 (1982-),男,浙江人,博士研究生,高级工程师,主要研究方向为导航、制导与控制;刘运鹏 (1986-),男,江西人,硕士研究生,工程师,主要研究方向为导航、制导与控制。
V
A
1006-3242(2017)02-0056-04