单机五陀螺捷联惯导系统重构算法研究
2017-08-07周维正李学锋
周维正 李学锋
北京航天自动控制研究所,北京 100854
单机五陀螺捷联惯导系统重构算法研究
周维正 李学锋
北京航天自动控制研究所,北京 100854

针对传统的故障诊断算法复杂且最后的目标是重构输出模型问题,提出基于重构优先的冗余信息管理算法。通过事先构造3个输出模型,提出一种判断故障的特征值,直接对3个输出结果进行分析判断和数据融合处理。该算法可在无故障时融合多模型的信息,且在单表故障下快速输出正确模型。通过对三正交两斜置的五陀螺输出信息数学仿真结果表明,基于重构优先的信息管理算法在无故障时输出精度较目前三表模型输出精度有提高,并在一度故障下有很强的鲁棒性和自适应能力。 关键词 捷联惯导;重构;数据融合;单机五陀螺
捷联惯组作为飞行器控制系统的重要设备,它的可靠性和精度直接决定了飞行任务是否成功。为保证航天飞行器能够可靠正确地完成指定任务,国内外均开展捷联惯性测量组合的冗余容错设计。单机多表方法既满足了一定的可靠性又不至于造成硬件的过度浪费。常见有四表、五表及六表配置。研究的热点包括多表结构安装角度优化、标定方法、故障检测以及多表信息融合,这几方面可以统称为冗余多表的信息管理。
文献[1]针对MEMS传感器分布式斜装冗余配置提出一种基于最优卡尔曼滤波的信息融合方式。文献[2]针对航天器冗余陀螺仪误差系数的在轨标定问题建立了冗余情况下的隐式标定模型。文献[3]验证了奇异值分解的故障诊断方法在沿正十二面体对称侧面配置的六陀螺捷联惯导系统上的应用效果。文献[4]基于九MEMS陀螺平台研究了SVM向量机故障诊断方法。文献[5]提出一种六陀螺的伞形安装方式并分析了相关特性。相关文献表明,当配置确定后,冗余多表的信息管理可分成故障检测和方案重构两方面,重构的内涵包括架构配置上的隔离和选择,也包括对所选择的配置表的信息融合。现有文献中对冗余多表的重构问题研究较少,文献[6-7]对卫星的3+1S陀螺组件及星敏感器的可重构性进行了分析。本文着重对冗余惯性组件内部的重构性进行分析,并针对当前故障检测算法和信息融合方法相对复杂、实时性不高,且故障诊断中阈值难设置的问题,提出一种三模型交叉融合重构切换算法,通过特征指标切换输出模型,无故障时提高融合精度,一度故障下快速输出正确结果。
1 五陀螺配置数学模型
假设五陀螺采用三正交两斜置配置结构,如图1所示。

图1 三正交两斜置结构配置示意图
图1中,g1,g2和g3分别在X,Y,Z三正交轴正向放置,g4和g5沿2个斜置轴S,T放置。
图1中各参数定义如下:OL,OK分别为g4和g5所在斜置轴OS,OT在XOZ平面上投影的线;α1和α2分别为从Y轴顺时针旋转至g4和g5所在斜置轴的角度;β1和β2分别为从Z轴逆时针旋转至OL,OK的角度。
五陀螺测量方程为
Z=HX+ε
(1)

(2)
任意选择3个或以上的陀螺,当所对应的输出安装矩阵Hi是列满秩时,就可以得出三轴角速度。五陀螺配置时可供选择的输出安装配置个数n为:
(3)
则对应的配置组合Hi有16种,Hi阵如表1所示,输出的最小二乘估计为:
(4)
每种配置矩阵对应的测量输出阵Zi的元素顺序与表中的陀螺组合定义顺序一致,如H14对应的Z14为[zy,zz,zs,zt]T。
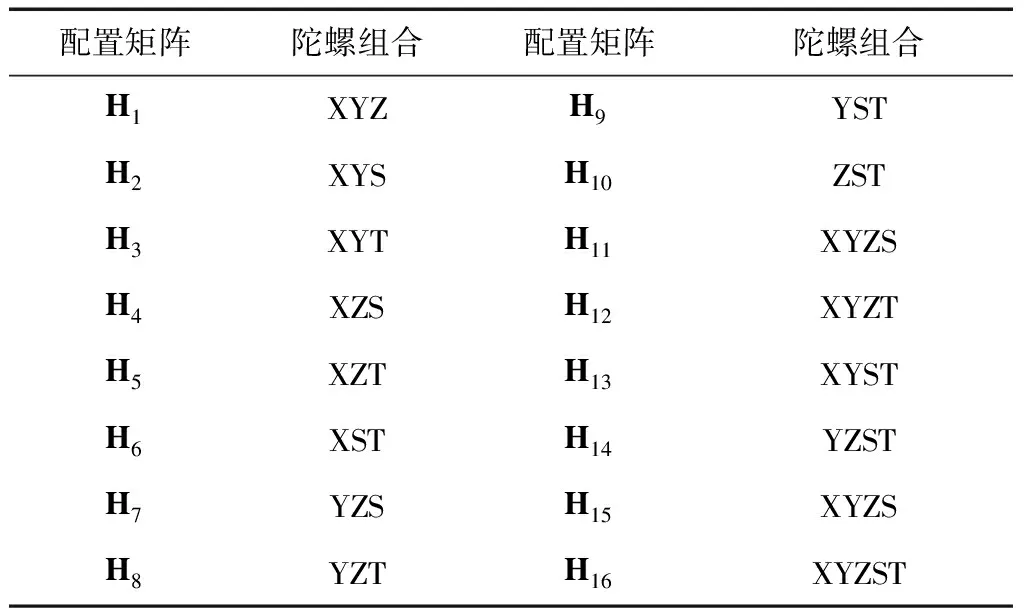
表1 五陀螺可选的陀螺组合输出定义
2 三模型交叉融合重构算法
三模型交叉融合重构切换算法的基本思想是先选定3种输出模型,然后直接对3种输出模型的输出结果进行分析。一度故障是指5个陀螺中只有1个发生故障,为保证可针对一度故障进行有效比较,对应3种输出模型,陀螺中的每一个都必须出现在2种输出模型中,这样在发生一度故障时,2种包含故障陀螺的输出模型会产生共因失效,对比3个模型的输出结果,就可以判断正确的模型输出。
为保证每个陀螺都出现在2个输出模型中,且每个模型中应含有不少于3个陀螺表,则对于五陀螺表冗余配置来说,3种输出模型中含有表的个数为3,3和4。
以H1,H6和H14三输出配置为例,三模型交叉融合重构切换算法原理框图如图2所示。
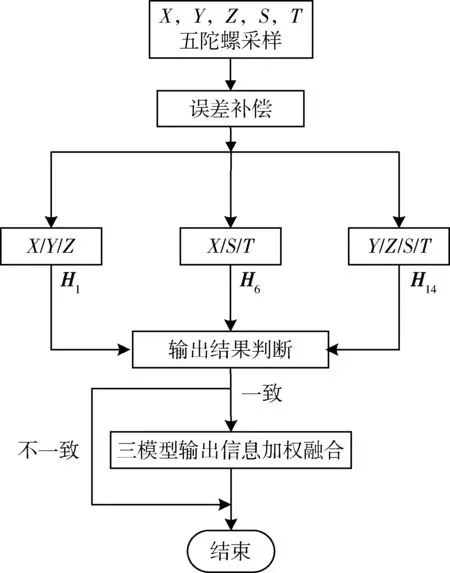
图2 五冗余陀螺信息处理流程示意图
如图2所示,三模型交叉融合重构切换算法利用了共因失效的机理,与以往先故障判定、后重构模型的管理算法相比。这种算法忽略了对故障表失效机理的讨论,以及不用特别设计奇偶校验方程。
以图2为例的3个模型的输出结果为:
(5)
其中
定义矩阵M
(6)
令
(7)
则用于判断故障的特征向量为
T=(Δ1,Δ2,Δ1/Δ2)
(8)
当发生单点故障时,设Δ为故障表偏离正常值的差值,则各表的故障向量对应表2所示。
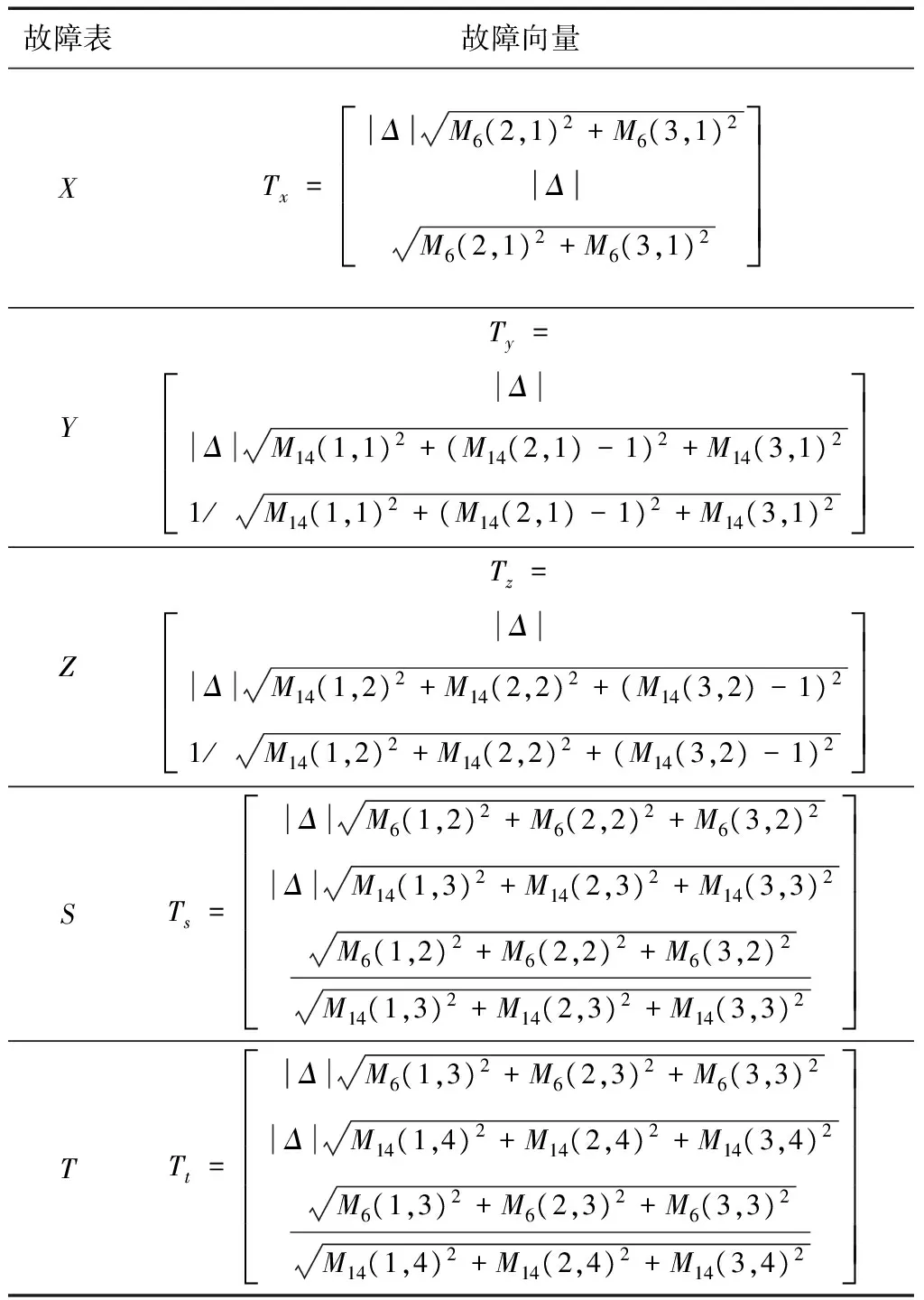
表2 一度故障下各表对应的故障向量
根据对应的特征向量,可定位故障表并直接选择不包含故障表的模型结果输出。
当判断未发生故障时,系统输出3种模型的加权融合结果为

p1+p6+p14=1, 0≤pi≤1
(9)
在对惯性元件进行优化配置时,曾引入性能指标Fp为[9]:
(10)
该指标反映了配置矩阵由噪声引起的导航误差,该值越小,系统由噪声引起的导航误差越小,获得的导航效果越好。
则加权因子可定义为
(11)
加权融合系数p1,p2,p3的设置没有考虑其它误差因素,配置决定后是定值,为保证对3种惯性表组合的在线评价,引入计数器,式(11)可作为加权系数的初值。
设k1,k2,k3为在线判断中3个模型决策输出的次数,K为观测窗口总计数。引入ρε,当表决输出的次数大于一定比例ρε后,在线调整加权因子的值。
(12)
(13)
3 故障特征向量分析
以α1=α2=54.75°,β1=45°,分析β2变化对特征向量中Δ1/Δ2值的影响。为防止矩阵运算中产生奇异值,即任意3个轴不能共面,保证各配置矩阵Hi的秩为3,β2的分析取值范围为60°~260°,去除其中的共面点,可得特征值Δ1/Δ2与β2变化之间的关系。
从图3可以看出,随着β2的变化,各轴的故障特征值Δ1/Δ2也随之变化,因此可以通过特征值直接定位发生故障的表,但前提是在选择的斜轴配置下,五表的特征值差异明显,如果在α1=α2=54.75°,β1=45°下,选择β2在120°~160°,从图3可看出,X表和Y表的特征值基本相等,无法单从Δ1/Δ2这一个指标确定故障轴。
在三输出模型这种结构下,由于结果是想输出正确的模型输出结果,而非定位到某一确定的故障轴,因此可以放宽要求,以H1,H6和H14为例,Y和Z是成对出现的,S和T是成对出现的,可设计相应安装角度使得Ty和Tz的值相等,Ts和Tt的值相等,当观测特征变量等于该值时,输出解算模型中不包括该两表。
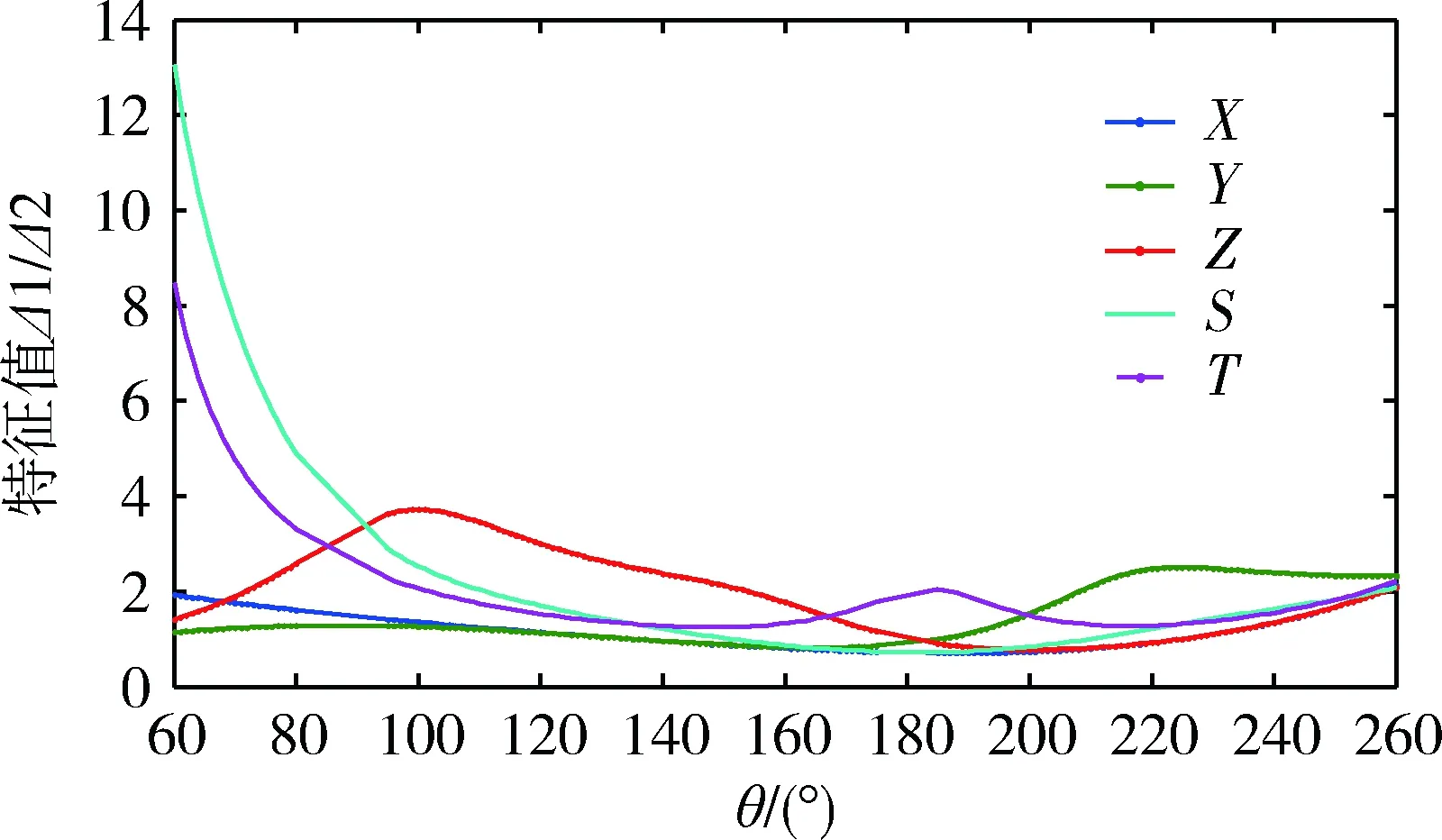
图3 特征值Δ1/Δ2随β2值变化图
4 仿真算例
针对配置角度分别为α1=α2=55°, β1=45°,β2=75°的五陀螺情况进行仿真。
根据表3中的公式可以计算出各轴故障时所对应Δ1/Δ2的故障特征值。
以某型巡航导弹标准弹道的三轴角速度,生成五轴角速度叠加随机白噪声,白噪声方差为 10-8。随机打靶1000次,则在无故障时,对比本文提出的算法,只选择三正交表输出和五表共同参与融合H16的输出结果。每种模型输出结果与标准弹道的误差值如表4所示,三模型融合输出的误差向量2范数值大于五表融合输出结果,小于三正交融合输出结果。可以看出如果无故障发生,在飞行过程中始终用五表信息进行融合效果最好,本文提出的算法虽然不及用五表信息融合精度高,但是具有容错的功能。

表4 惯组信息融合效果
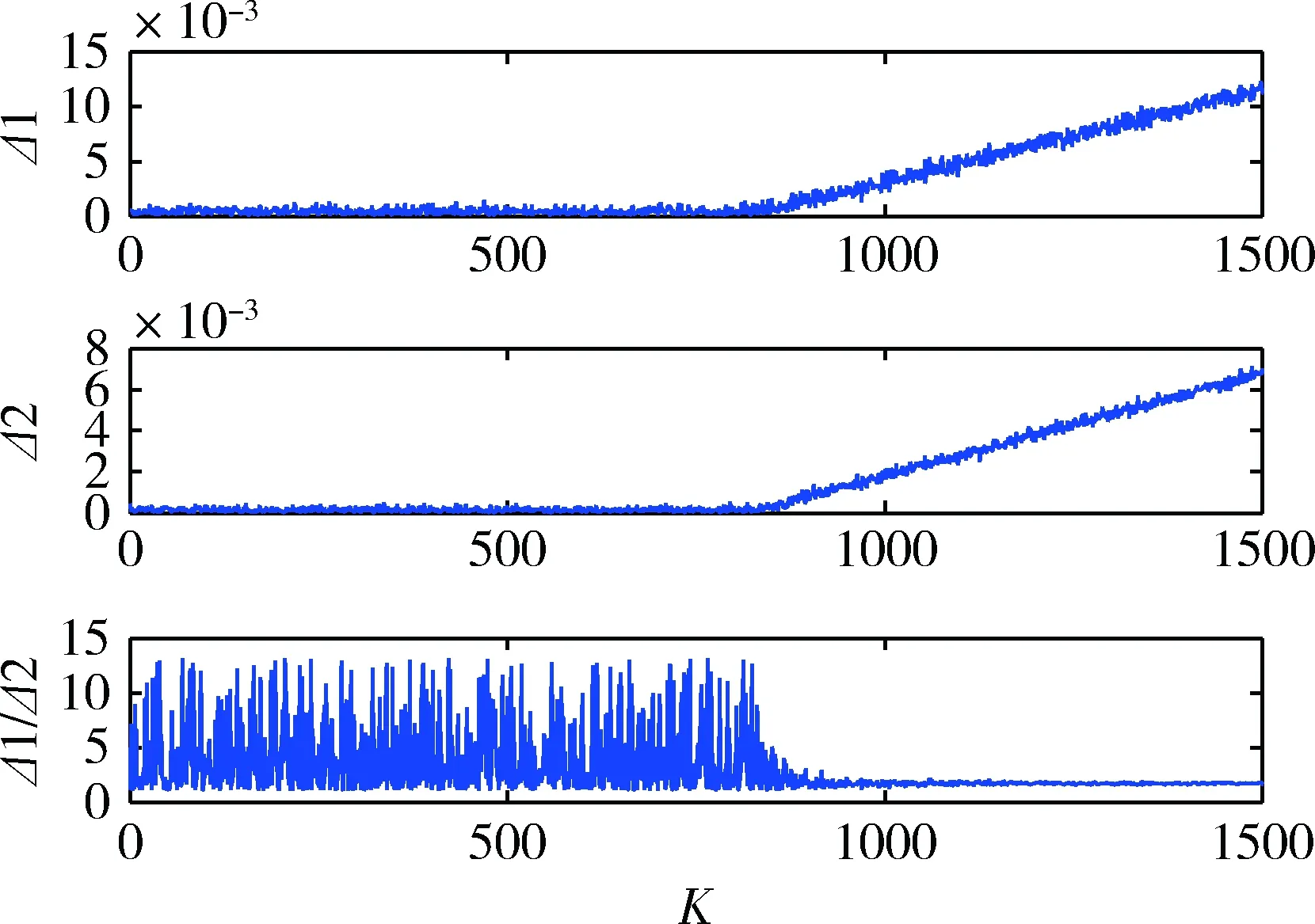
图4 X轴斜坡故障下特征值变化曲线
当给X表在某一时刻注入10-4的斜坡故障时,则特征向量T=(Δ1,Δ2,Δ1/Δ2)变化如图4所示,由图可知,未发生故障时Δ1,Δ2均为接近于0的小量,Δ1/Δ2随机变化,发生斜坡故障后Δ1,Δ2逐渐增大,Δ1/Δ2收敛到固定值左右为理论计算的1.69。
当给S表在仿真中注入常零值故障时,特征向量T=(Δ1,Δ2,Δ1/Δ2)变化如图5所示,由于仿真中某些时刻正确值也为0,因此曲线来回切换,由图中可知,对于S表发生故障后Δ1大于Δ2,为清楚考察故障后的Δ1/Δ2值,将区间(5.8-6.4)作为去噪区间,图6给出了落在该区间的Δ1/Δ2的点数,在830步注入故障后,在理论值6.06左右点数明显增多。
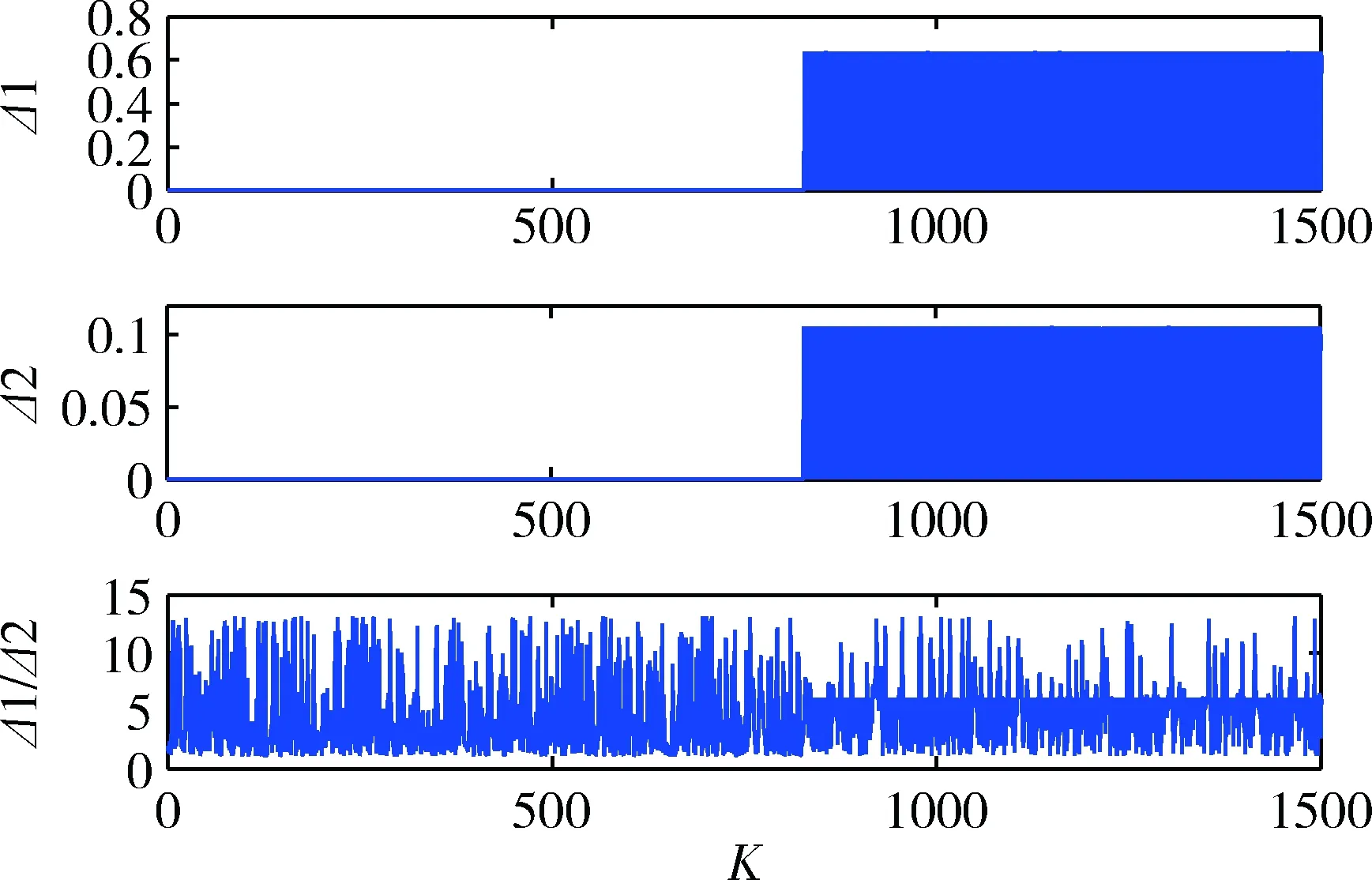
图5 S轴常零值故障下特征值变化曲线
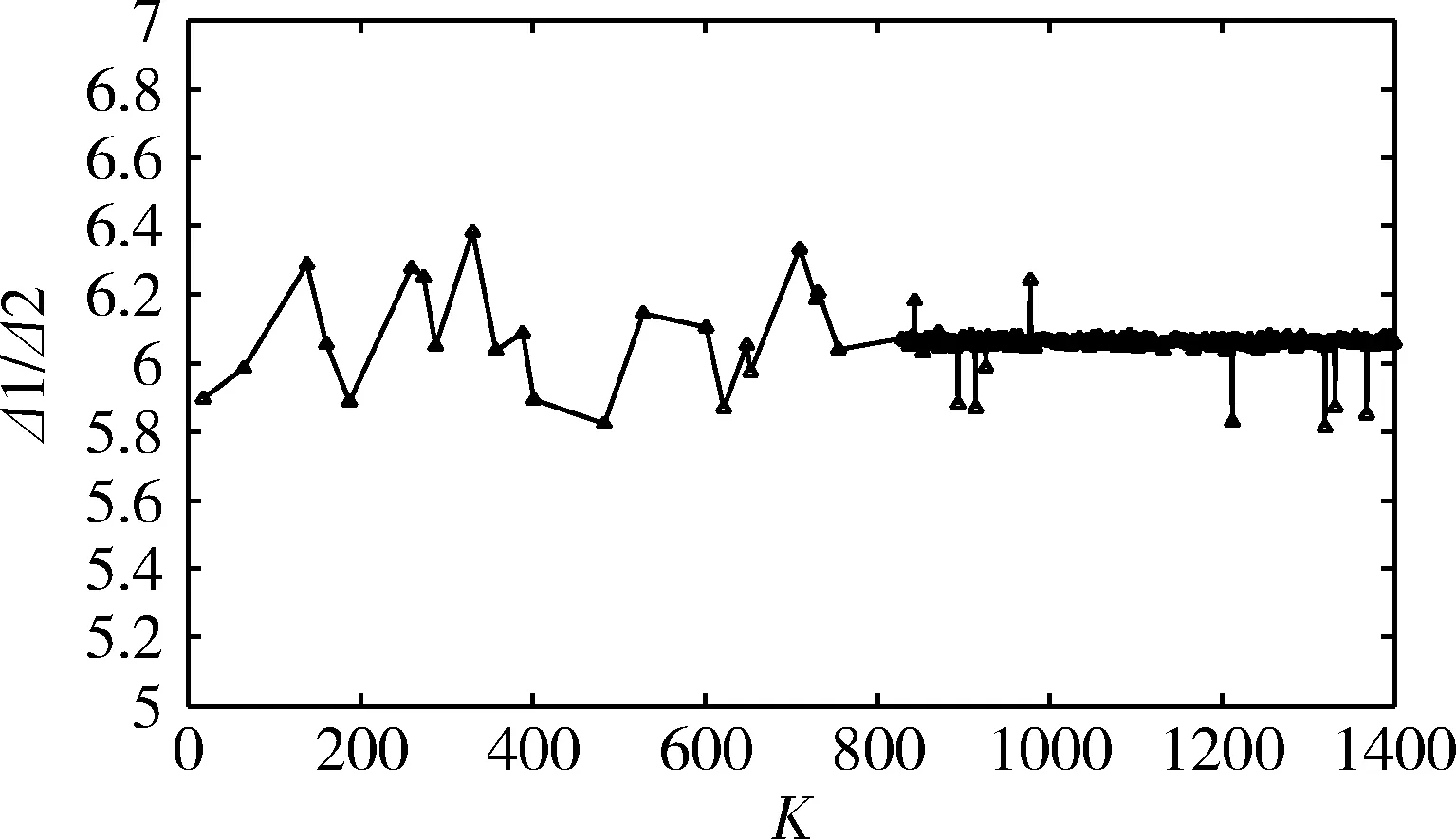
图6 S轴常零值故障下特征值去噪曲线
5 结论
针对单机五冗余陀螺配置,提出一种基于重构优先和特征值判断的冗余信息管理方法,方法以输出结果为导向,没有按照传统的故障诊断隔离再重构的方式进行,引入共因失效的机理设计算法,可用这种思想配置安装矩阵,仿真结果表明,在无故障情况下,算法的输出精度较正交三表输出有提升,虽然精度低于五表融合输出结果,但是提高了故障的快速反应和容错能力。在一度常零值故障和缓斜坡故障下验证了算法性能,结果表明,算法可以较快切换输出模型,保证结果正确,有较强的鲁棒性和自适应性。
[1] 吴风喜, 刘海颖, 华冰. 斜装冗余传感器的分布式导航系统研究[J]. 宇航学报, 2015, 36(2):173-178.(WuFengxi,LiuHaiying,HuaBing.ResearchonDistributedNavigationSystemBasedonSkewRedundantSensors[J].JournalofAstronautics,2015, 36(2): 173-178.)
[2] 杨华波, 张士峰, 蔡洪. 空间冗余陀螺仪在轨标定方法[J]. 宇航学报,2010, 31(1):104-110. (YangHuabo,ZhangShifeng,CaiHong.AnIn-FlightCalibrationforRedundantInertialMeasurementGyroscope[J].JournalofAstronautics, 2010,31(12):104-109.)
[3] 贾鹏, 张洪钺. 基于奇异值分解的冗余惯导系统故障诊断[J].宇航学报,2006,27(5):1076-1080.(JiaPeng,ZhangHongyue.FaultDetectionforRedundantInertialNavigationSystemBasedonSVDMethod[J].JournalofAstronautics, 2006,27(5):1076-1080.)
[4] 梁海波.基于陀螺冗余的微惯性系统关键技术研究[D].哈尔滨:哈尔滨工程大学,2011:39-44. (LiangHaibo.KeyTechniqueofMicroInertialSystemBasedonRedundantGyroscopes[D].Harbin:HarbinEngineeringUniversity, 2011: 39-44.)
[5] 尹逊和, 林宝军, 周锐,等. 伞形安装的陀螺系统性能分析[J]. 宇航学报, 2008, 29(1):178-182. (YinXunhe,LinBaojun,ZhouRui,etal.PropertyAnalysisforSatelliteAttitudeControlSystems[J].JournalofAstronautics,2008,29(1): 178-182.)
[6] 樊雯, 程月华, 姜斌. 卫星姿态控制系统的可重构性分析[J].宇航学报,2014, 35(2): 185-191.(FanWen,ChengYuehua,JiangBin.ReconfigurationAnalysisforSatelliteAttitudeControlSystems[J].JournalofAstronautics, 2014, 35(2): 185-190.)
[7] 胡宇桑, 王大轶, 刘成瑞. 卫星姿控系统可重构性综合评价方法研究[J]. 宇航学报, 2015, 36(5):549-556.(HuYusang,WangDayi,LiuChengrui.ReconfigurabilityComprehensiveEvaluationforSatelliteAttitudeControlSystem[J].JournalofAstronautics, 2015, 36(5): 549-556.)
[8]YangCK,ShimDS.OptimalConfigurationofRedundantInertialSensorsforNavigationandFDIPerformance[J].Sensors, 2010(10): 6497-6512.
[9] 郭思岩.捷联系统的冗余配置与故障管理方案研究[D].哈尔滨:哈尔滨工业大学硕士论文,2012:10-11(GuoSiyan.RedundantConfigurationandFaultManagementSchemeofStrapdownSystem[D].HarbinInstitueofTechnology, 2012:10-11.)
Research on Reconfiguration of Five Gyros Strapdown Inertial Measurement Unit
Zhou Weizheng, Li Xuefeng
Beijing Aerospace Automatic Control Institute, Beijing 100854, China
InviewofcomplicatedFDIandaimsforareconstructedmodel,anewalgorithmbasedonreconfigurationpriorityisproposed.Threemodelsareconstructedahead,ajudgeindexfrom3outputsisusedtoselecttherightmodel.Inthisway,theprecisionisimprovedunderthenormalstateandtherightmodelcanbeoutputtedatoncewithasinglepointoffailure.Theconfigurationof5gyrossimulationresultsshowthattheestimationprecisioncanbeimprovedbyusingthealgorithmbasedonthethreemodelsundernormalstate,andthealgorithmhavebetterrobustnessandadaptabilitywithasinglepointoffailure.
Strapdowninertialnavigationsystem;Reconfiguration;Datafusion; 5gyros
2016-06-27
周维正(1987-),男,黑龙江嫩江人,博士,工程师,主要研究方向为控制系统电气综合;李学锋(1966-),男,成都人,博士生导师,研究员,主要研究方向为导航、制导与控制。
V448.1
A
1006-3242(2017)02-0003-05