主动雷达导引头工作频段选择
2017-08-02中国电子科技集团公司第三十八研究所
中国电子科技集团公司第三十八研究所 李 强
主动雷达导引头工作频段选择
中国电子科技集团公司第三十八研究所 李 强
介绍了主动雷达导引头总体设计中,工作频率的选择对导引头战术技术指标性能的影响。针对作用距离和探测精度两种关键技术指标与工作频段选择之间的关系进行了详细分析,给出了主动雷达导引头工作频段选择的建议。
雷达导引头;工作频段;作用距离;探测精度
1.引言
雷达导引头是一种安装在导弹战斗部前端的无线电探测装置,根据工作体制一般可分为主动、半主动、被动和复合等几种。其中主动雷达导引头的任务是在杂波和干扰背景中检测目标信号,并从中提取出位置参数和运动参数等信息[1]。主动雷达导引头具有跟踪目标距离远,跟踪角速度大,导引精度高,抗干扰能力强等特点。主动雷达导引头的工作频段、工作波形和工作体制设计,决定了导引头的主要战术技术性能[2]。在诸多技术指标当中,作用距离和探测精度指标可以作为评估主动雷达导引头设计优劣的两个基本条件[3]。由于受到战斗部安装空间的限制,主动雷达导引头较低的功率孔径积制约了作用距离等性能指标。本文就工作频段的选择对作用距离和探测精度的影响进行分析并给出了初步研究结果。
2.工作频段
由于弹载平台的内部空间及载重量有限,其对主动雷达系统的首要要求是体积小、重量轻,因此雷达导引头工作频率一般都选择比较高的频段。常用的主动雷达导引头工作频段有C频段(4GHz-8GHz)、X频段(8GHz-12GHz)、Ku频段(12GHz-18GHz)、Ka频段(27GHz-40GHz)、W频段等(75GHz-110GHz)。选择较低的工作频段时,作用距离一般较远,因为在低频段易于获得更高的功率孔径积。另一方面,选择高的工作频段,可以完成对距离和位置等的精确测量,因为更高的频率可以提供更宽的带宽(提高距离精度和分辨率),以及在给定物理尺寸时更窄的波束宽度(提高角精度和角分辨率)。工作频段的选择对导引头雷达系统的性能指标有很大的影响,下文就从作用距离和探测精度两种关键指标入手,对雷达工作频段的选择进行分析。
3.作用距离
根据雷达方程,主动雷达导引头在无杂波区的最大作用距离为:

式中,Pt为雷达发射峰值功率,Gt和Gr分别为导引头天线发射增益和接收增益,λ为工作波长,σ为探测目标的雷达截面积(RCS),k为玻尔兹曼常数,T0为标准室温,B为接收机带宽,Fn为接收机的噪声系数,D0为检测因子,Ls为系统总损耗。
从雷达方程中可以看到,工作频率的选择对导引头作用距离的大小有着重要的影响,并体现在多个计算参数中。峰值功率Pt由导引头天线阵面可容纳的天线单元数以及单元峰值功率共同决定,其中最大可容纳天线单元数和工作波长λ直接相关。雷达工作频段越高,波长越小,相同天线阵面面积可容纳的天线单元数就越多(天线单元间距约半个波长)。但单个组件的峰值功率并没有随着频率的增高而线性变大,因此峰值功率和工作频段之间不是简单的正反比关系。随着雷达收发组件技术的发展,峰值功率也在逐步变大。
天线增益G可以表示为:

式中Ae为考虑了天线孔径效率的等效天线面积。因此,GtGr与工作波长的四次方λ4成反比,在其他参数条件不变的情况下,选择更高的工作频段,可以获得更高的天线增益,从而获得更远的作用距离。
目标的雷达截面积σ除了与目标的结构、表面介质、极化方式和目标姿态角等因素有关以外,也和主动雷达的工作波长有关。雷达截面积的起伏是频率的函数,与峰值功率的情况类似,也不能用正反比来简单概括。
在给定检测概率及虚警概率的情况下(检测因子D0固定),接收机带宽和噪声系数相同时,k和T0为常数,最小可检测信号功率与工作频段的选择没有直接对应关系,可以作为常数来考虑。需要注意的是,主动雷达导引头工作在不同频段时,工作带宽、噪声系数和检测因子也不尽相同。
系统损耗Ls包括传输和接收的损耗、天线波束形状损耗以及各种信号处理损耗等。雷达导引头工作在不同的频段,电磁波传播中受到的大气衰减和雨衰也都不同。为了尽可能减小损耗对作用距离的影响,工作频段常选择在大气衰减较小的电磁波“传播窗口”周围(Ka频段,中心频率选择为35GHz;W频段,中心频率选为94GHz)。下表给出了常用的几种导引头工作频段下大气衰减的对比。

表1 不同工作频段下的衰减对比(未考虑波束仰角,3 mm/h雨量情况下)
从上表可以看出,随着工作频段的提高,衰减逐渐变大(特别是雨衰),导致探测距离变小。当工作频率超过20GHz时,大气衰减及雨衰的影响显著增大。工作波长减小带来的增益变大,可能会随着衰减的增加而消失。一般地,具有较高工作频率的雷达导引头,作用距离指标相应较低,由此对应的总损耗并不一定大于工作于较低频段的雷达导引头。
4.探测精度
主动雷达导引头的另一个重要技术指标是探测精度,主要包括测角精度、测距精度和测速精度。
4.1 测角精度
影响雷达导引头测角误差的因素有很多,可分为系统误差和随机误差。其中系统误差包括:电轴标定误差、电轴漂移误差、天线罩折射误差、弹体扰动误差等,系统误差可通过校正或补偿系统进行修正。随机误差包括:热噪声误差、目标角噪声误差、幅度起伏误差、杂波、干扰等。
角闪烁引起的测角误差和目标的尺寸以及探测距离有关,当二者确定时,可以看作是常数。热噪声是导致雷达导引头远距测角误差的主要原因,雷达导引头由热噪声引起的均方根角误差为:
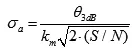
式中,θ3db为天线波束宽度,km为归一化斜率,S/N为信噪比。根据导引头的不同作战应用场景,也可以用信杂比S/C或信杂噪比S/ (C+N)来代替S/N。当S/N固定时,测角精度由波束宽度来决定。天线波束宽度越窄,相应的测角误差就越小。相同天线尺寸和信噪比条件下,工作频段越高,导引头的测角精度越高。
4.2 测距精度
产生测距系统误差的主要因素:零距离标定误差、光速不稳定误差、接收机延迟误差和动态滞后误差等。
产生测距随机误差的主要因素:热噪声误差、杂波与干扰误差、调制脉冲前沿抖动、距离量化误差、距离闪烁误差、距离-多普勒耦合误差和动态滞后变化误差等。
由杂波和噪声引起的测距误差可以表示为:
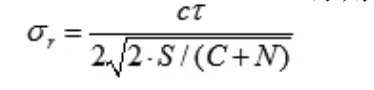
式中c为光速,τ为脉压以后的脉冲宽度,其他参数同上式。导引头工作在不同频段时,如果脉冲宽度以及信杂噪比相同,测距精度没有区别。影响测距精度的其他误差都和工作频段无关,可以看作是常数。
4.3 测速精度
产生测速系统误差的主要因素:鉴频器零位漂移误差、接收机延迟变化误差和动态滞后误差等。
产生测速随机误差的主要因素:热噪声误差、频率稳定性误差、杂波与干扰误差、目标旋转与内部运动误差和动态滞后变化误差等。
利用多普勒频率进行弹目相对径向运动速度的测量,雷达导引头速度测量精度主要取决于PD处理的滤波器带宽。这里不考虑采用相邻多普勒频道幅度输出进行内插测速,只考虑数多普勒滤波器中心方式测速。滤波器带宽由脉冲重复频率和积累脉冲数共同决定,与导引头的工作频段选择没有直接关系。
5.结论
通过以上分析,工作频段的选择对主动雷达导引头的作用距离和探测精度有着重要的影响,选择任何一种工作频段都不可能使所有的技术指标达到最佳。在实际雷达导引头总体设计时,需要综合多种指标因素以及工作环境来确定工作频段。当主动雷达导引头外形尺寸包络和探测距离指标确定时,若对探测精度要求越高,则优先选择更高的工作频段(Ku频段、Ka频段和W频段)。若需要获得更远的雷达探测距离,考虑到高频段带来的高大气衰减及雨衰,一般选择较低的工作频段(C频段、X频段)。另一方面,可以选择双工作频段(C频段+Ka频段)来兼顾更远的作用距离和更高的探测精度。
[1]高烽. 雷达导引头概论[M].北京:电子工业出版社,2010.
[2]王志诚,高烽.Ku波段与Ka波段主动雷达导引头之比较[J].制导与引信,2011(32):11-34.
[3]汤晓云, 樊小景, 李朝伟. 相控阵雷达导引头综述[J]. 航空兵器, 2013(3):25-30.
李强(1987—),男,安徽肥东人,博士,工程师,现供职于中国电子科技集团公司第三十八研究所,研究方向:雷达总体技术、雷达信号处理、干扰抑制。
