二次监视雷达目标点迹分裂分析与凝聚方法
2017-08-02四川九洲空管科技有限责任公司
四川九洲空管科技有限责任公司 何 川 李 璐
二次监视雷达目标点迹分裂分析与凝聚方法
四川九洲空管科技有限责任公司 何 川 李 璐
二次监视雷达点迹凝聚是二次监视雷达信号处理的重要组成部分,合适的点迹凝聚方法,能有效的提高目标距离、方位探测精度。但是在复杂的情况影响下,会产生目标分裂状况,对后续的航迹处理跟踪的准确性产生直接影响,对二次监视雷达的探测效果产生较大的影响,不利于监视人员掌握空勤状况。因此本文将分析二次雷达点迹分裂的原因及解决该问题的方法。
二次监视雷达;点迹分裂;点迹凝聚
1.引言
在空中交通管制系统中,单脉冲航管二次监视雷达可提供合作目标的方位、距离、高度和识别属性等新息。由于探测距离远、测量精度高、获取信息多等优点,航管二次雷达成为空中交通管制重要的感知系统和决策依据。然而,随着航空运输业的飞速发展,飞行密度日益增加,给航管二次雷达测量质量提出了更高的要求[1]。更加复杂的电磁环境也给航管二次雷达的信号及数据处理带来的新的挑战。
在单脉冲二次监视雷达设备中,点迹提起器(Plot Extractor)是各种类、各厂商航管二次雷达不可缺少的组成部分,它的主要功能是:凝聚目标的距离、方位,计算目标的识别代码(M3/A、MC、MS代码)等信息。点迹凝聚的处理精度及能力是二次监视雷达系统的一项重要技术指标。图1给出了一般情况下,工程应用中的点迹凝聚处理的框图。
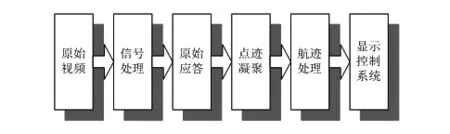
图1 二 次雷达点迹处理框图
常用的点迹凝聚方法在复杂的地形及各种干扰影响下,会产生目标分裂情况,对二次雷达的效果产生极大的影响。本文介绍的点迹凝聚的基本概念,并且通过对目标分裂现象的分析, 提出一种适合二次监视雷达的点迹凝聚方法,以抑制目标分裂现象的发生, 提高雷达跟踪目标的准确性[2]。
2.点迹分裂分析
2.1 点迹分裂的定义
所谓目标分裂是指雷达对同一目标的一次扫掠过程中,目标机的应答信号经信号处理后表现为两个或两个以上目标的现象,也就是说二次雷达把同一个目标判成几个目标。目标分裂又可分为方位上分裂和距离上分裂两种。方位分裂是指某一目标在同一距离, 不同方位上被判为多个目标; 距离分裂是指某一目标在同一方位, 不同距离上被判为多个目标。目标的分裂可只在距离或方位上出现, 也可同时在方位和距离上出现[2-3]。
2.2 距离分裂的原因分析
二次雷达原始应答信号在进行点迹凝聚之前,需要进行框架检测、脉冲前沿后沿检测、6dB检测,用于提取目标的量化幅度及量化距离。ICAO附件10中的应答器标准定义了应答脉冲的前沿时间位置,其定义为应答器应答调制信号前沿的半压点对应的时间。ICAO附件10所允许的应答机应答脉冲持续时间在0.35-0.55us范围内,任何持续时间超过最大的0.55us的脉冲都可能是2个脉冲。所以当两个应答脉冲发生叠加时,脉冲宽度就会大于0.55us,脉冲应答信号真实的前沿(ALE)被检测出来,根据二次雷达信号处理的脉冲后沿反推检测规则,会出现伪前沿(PLE)也被检测出来[4-5]。
在设备连续波干扰、多路径反射、异步应答干扰、远距离信号幅度迅速衰落等情况时,甚至在某些时候会出现3个或以上应答前沿的情况,那么在临近的距离单元会出现大量的虚假应答。
由于现代二次雷达的测距精度及分辨力指标要求是相对很高一般是约几十米,甚至更低,大多数的凝聚处理使用的距离凝聚窗都很小,因此由于距离因素引起的点迹分裂更易产生。距离上目标分裂示意图如图5所示。

图2 距离目标分裂示意图
2.3 方位分裂原因分析
在2.1章节中已经说明了,安装机械式天线的二次监视雷达工作时,天线连续旋转对周围空域进行扫描时,能够在方位上获取同一目标扫描的N个应答信号, 这些回波经信号处理后形成目标原始点迹,携带目标的方位、距离、识别代码、信号幅度等信息[2]。如果同一个目标在方位上的应答因为某些原因间断性或者连续性丢失,一旦丢失程度达到目标结束原则时,就会造成目标在方位上的分裂。
下面是几个情况是造成目标丢失的可能原因:
a)询问应答信号之间的传播路径上的地物遮挡;
b)应答机应答率限制;
c)机载设备的相互抑制;
d)上下天线切换的限制;
e)异步干扰(FRUIT);
f)应答脉冲信号的重叠;
方位目标分裂示意图如图3所示。
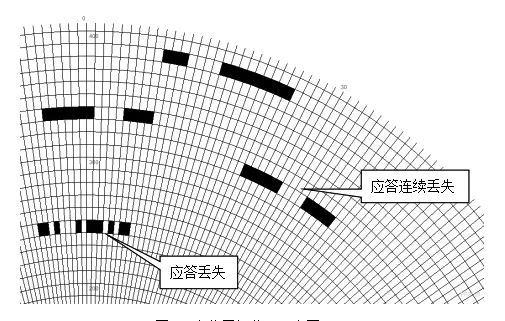
图3 方位目标分裂示意图
在大多数情况下,点迹分裂是有距离和方位上的综合因素造成的。如图4所示。
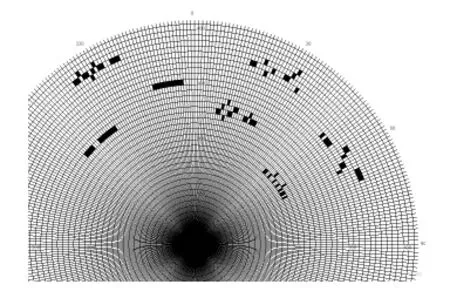
图4 常见的目标分裂情况
3.深度强相关和点迹间相关方法解决点迹分裂问题
在常规的点迹凝聚方法的基础上,新增加了深度强相关和点迹间相关的方法,既保证了目标的分辨能力,也一定程度上处理了二次雷达点迹分裂的问题。方法基本流程图如图5所示。
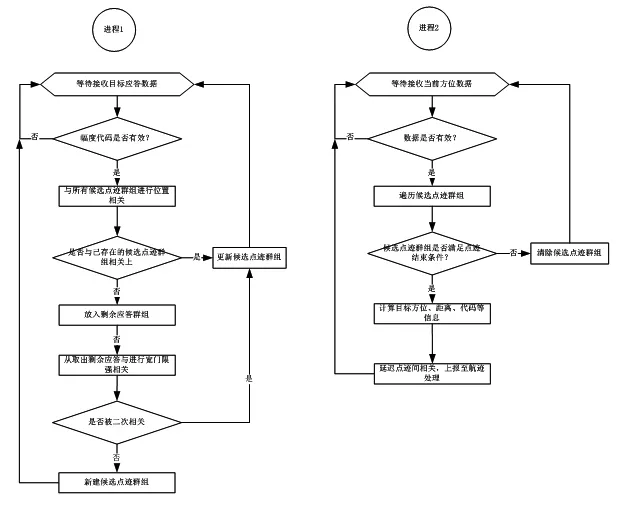
图5 点迹凝聚方法的基本流程图
3.1 小门限凝聚(窄门限宽准则凝聚)
常规的方法采用距离和方位分别一次凝聚的方法,而该方法距离方位同时凝聚。并且由于该二次雷达采用单脉冲测角体制,测角的精度要求高,在兼并考虑分辨力的前提下,采用小距离-方位窗进行相关。
当点迹凝聚收到携带距离、方位、和差幅度值、相位、代码信息的应答信号后,如果该应答是首次应答,则创建一个候选点迹群组(candidate plot group),等待后续应答信号与之相关。如果该点不是首次应答则和所有已经存在的候选点迹群组进行距离方位相关。相关时以候选点迹群组中上一次应答的方位(PreA)和距离(PreR)为中心,以RG{rmin,rmax}、AG{amin,amax}为相关窗进行位置相关,相关窗计算公式为:
rmin= PreR - RStep
rmax= PreR + RStep
amin= PreA - AStep
amin= PreA + AStep
其中RStep为距离分辨力指标要求、AStep为距离分辨力指标要求,如AStep=0.6度、RStep=50米。小相关窗示意图如图6所示。
与该点迹候选群组能够相关上的应答,均将信息保存入该候选点迹群组。按照应答数据的接收顺序将目标应答依次相关,直到满足相关结束准则,获得候选点迹群组。同时所有未被相关的原始应答均被存入剩余应答组(remainder reply group),进入深度强凝聚。

图6 小相关窗示意图
3.2 深度强凝聚(宽门限严准则凝聚)
经过小门限凝聚,虽然被凝聚的原始应答相对可靠,但是有可能漏掉一定的应答数据,漏掉的应答数据,重新形成候选点迹群组,容易形成点迹分裂现象,因此我们根据二次雷达应答信号的特点使用深度强凝聚,进行补充凝聚。
在上面的步骤中已经得到了基本的候选应答群组,现在将没有相关上的应答从剩余原始应答群组依次提取出来,与所有候选点迹群组进行一个宽大窗的相关处理,RGS{rmin,rmax}、AGS{amin,amax},RGS是可能出现的最大距离偏移值,AGS是可能出现的最大方位偏移值。在本次相关中,凡是被相关上的原始应答,必须经过代码判断,如果剩余应答的识别代码(如M3/A、MS地址等)与点迹组的应答识别代码相同,则将其重新加入候选点迹群组中。如果是高度应答,相同的高度码的剩余应答也加入群组,根据高度应答码的变化规律,如果剩余高度码与候选点迹的高度码相差1个码位的应答,也加入点迹组群组。
该方法找回了有效的原始应答,并且减少了剩余应答的个数,从而的降低剩余应答形成新的候选点迹群组的几率。深度强凝聚示意图如图7所示。
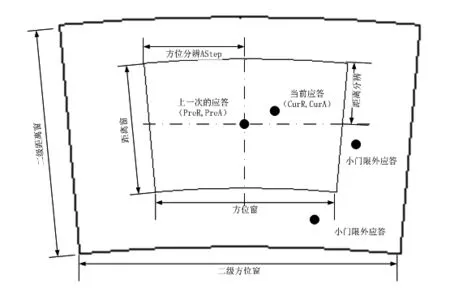
图7 深度相关示意图
3.3 融合提取点迹
获取了最终确认的候选点迹群组使用统计学的方法拟合出当前目标的精确坐标位置以及其他的信息,完成凝聚,提取出点迹。依据经验和实际情况,本文分别对各距离方位采取了不同的办法进行计算。
a)计算距离(Range)
二次雷达的脉冲采样时钟一般较高,所以二次雷达系统测量的距离一般精度较高,所以直接采用“均值法”求得:

b)计算方位(Azimuth)
信号幅度越大的位置越接近目标的真实方位,所以采用“质心法”,结合信号幅度信息进行计算:
c)获取高度及其他参数
二次雷达探测的高度信息,是应答信号的携带的高度编码数据,因此按照高度编码规则将高度数值进行解析,即可获取目标准确的海拔高度数据。
同时为了后续航迹融合处理能够有更好的效果,可以将波束宽度、目标幅度、有效应答次数,等信息进行附带统计,形成点迹数据准备送给航迹处理。

图8 方法应用前(左图)与应用后(右图)效果对比
3.4 点迹间相关
通过以上处理后,点迹分裂的情况大为改善,但是在某些特定的电磁环境极其恶劣的场合仍然可能出现个别分裂点迹,在进行大量的数据分析以后,发现对于同一个目标分裂出的多个点迹,满足点迹结束条件的时间很接近,因此点迹间相关的方法,做进一步的凝聚。
在所有点迹被上报给数据处理进行后续的航迹跟踪之前,延时一定的时间,一般为3~5个触发周期。在所有点迹群组中进行点迹间位置相关,如果发现位置靠近且代码相同,高度相当的点迹,立即进行幅度、距离比较,按照距离近优先、幅度高优先的原则,进行合并或剔除处理,最终仅保留一个最终点迹上报数据处理。
4.试验对比
该方法在某型地面二次监视雷达设备中进行了验证试验。将出现分裂的原始应答进行回放,验证点迹凝聚性能。点迹凝聚方法使用前和使用后的效果对比如图8所示。点迹凝聚方法对点迹分裂有较好的抑制。
5.结束语
目标分裂造成二次雷达探测的点迹数量增加,影响二次雷达的点迹效果。同时分裂的点迹也加大了航迹相关处理的工作量,容易造成航迹处理过载,影响后续目标的正确处理, 以及二次雷达航迹对目标的跟踪质量,从而影响整个二次监视雷达的性能。针对二次监视雷达的点迹凝聚方法和点迹分裂原因,不少文件均未提到,本文介绍了二次监视雷达点迹凝聚方法,分析了出现点迹分裂的原因,并且提出了一种实际可行的凝聚准则和方法,包括小门限凝聚、深度强凝聚方法及点迹间相关方法等。理论上,该方法合理可行。在实际应用中,文中的方法已成功运用于多型号的二次监视雷达系统中,并取得了较好的效果。
[1]崔海欧,方咏秋.某航管二次雷达受扰问题定位及分析[J].科协论坛,2013.
[2]刘树峰.雷达目标点迹分裂与改进的点迹提取器设计[J].电子技术,2010年第23卷第Z1期.
[3]贺士廉.克服小滑窗检测中目标分裂的方法[J].雷达与对抗,1995(4):156-159.
[4]Michael C.Stevens.Sencondary Surveillance Radar[M].boston and london:Artech House,1998.
[5]张慰,徐炎祥.二次雷达远离[M].北京:国防工业出版社,2007.11
