基于面阵光学传感器的自寻迹平台研发
2017-08-02南京师范大学电气与自动化工程学院张方舟
南京师范大学电气与自动化工程学院 张方舟
基于面阵光学传感器的自寻迹平台研发
南京师范大学电气与自动化工程学院 张方舟
无人控制平台是在一个以汽车为模型的自寻迹平台和直流电机基础上,配以CPU及外围电路共同构成的智能平台,其优点在于能够根据路况而改变和自动实现转弯等功能。基于此,本文研究了基于CF0350B面阵摄像头模块识别智能小车的设计与开发,分别进行了摄像头传感器信号采集处理模块设计,主板及电机驱动模块设计,控制算法的编制及执行和调试、伺服电机控制设计与安装,通过系统硬件平台搭建和软件设计,采用CF0350B面阵传感器作为平台的循迹模块来识别白色路面,采集信号并将信号转换为能被单片机识别的数字信号,完成了基本功能和系统调试,测试结果表明系统具有良好的避障成功率和控制精度。
单片机;面阵摄像头模块;硬件平台;自动循迹;自动控制技术
0 引言
本文研究的控制对象是前轮转向、后轮由直流电机驱动的自寻迹平台。若要取得更精确的控制效果,需要更短的反应时间,来提高平台的敏捷性。当伺服电机工作时平台的运行轨迹与MCU所计算的路径并不完全相同,因此需要对平台的机械控制进行优化。
我们选择了NXP公司的MK60FX512VLQ15单片机作为平台的主控芯片,其采集AD时的转化能力在高速运算情况下有所欠缺,所以我们采用硬件二值化的设计,将CF0350B输出的灰度图像经二值化处理得到只有黑白两色的图像以方便单片机进行处理。在电机驱动方面,我们根据自寻迹平台所使用的电机的特点,采用了N沟道MOSFET LR7843和专用栅极驱动芯片IR2104组成的驱动电路,驱动能力极强。并使用多种辅助调参手段简化调参步骤,比如使用OLED屏以及五向开关进行操作。
随着利用自动化控制研究的进步以及单片机的广泛运用,图像识别技术得到了长足的发展。本文将介绍关于基于CF0350B模块,同时应用OLED和五向开关等来完善人机交互界面,来实现自寻迹平台设计的方案。
1 CF0350B CCD传感器
1.1 主要应用背景
在本领域内使用较多的是一种CMOS图像传感器模块,该模块支持连续和隔行两种扫描方式,有VGA和QVGA两种图像格式,最高像素和帧速率均能够满足自寻迹平台所要求的条件。在自寻迹平台的设计过程中,我们考虑需要解决的问题可以归纳为以下两点:
(1)不同光线条件下对平台的影响。环境光线对平台所使用的传感器的输出信号有极大的影响。因此同一控制变量(曝光时间长短、镜头光圈大小)难以适应各种不同的复杂情况,因此要对它们进行适时调节;
(2)对各种干扰信号进行校正。由于光线,杂点,远处图像不清晰等因素干扰,图像效果会不理想。所以,在软件上进行处理,排除干扰因素,对赛道进行有效的识别。由于摄像头自身的特性,采集到的图像会产生梯形式变形和桶形式变形,使得得到的图像失真,不利于处理。因此我们还要对采集到的图像进行一系列的校正,使得到的图像能正确的反应赛道情况。
1.2 实际应用方案
CF0350B面阵光学传感器阵列的分辨率非常符合自寻迹平台的要求,是隔行扫描,采集VSYN,其输出分辨率为640*240。在QVGA格式下工作时,输出分辨率为320*120。该分辨率下非常适合采集路径信息,数据容量有限,也保持了图像的完整。
光电二极管采集到光线时上,产生光电流,通过积分电路进行积分。积分后的输出电压与该点的光强和积分时间成正比。因此为了适应不同的使用环境,光电二极管的积分时间需要为可变的。
自寻迹平台所使用的传感器探测距离远,其所采集到的信息丰富度足够自寻迹平台识别到前方环境中所有的元素信息,然后转变为模拟信号,并进行模数转换得到数字信号,送到单片机中加工处理。处理完成后通过软件算法对图像信号进行处理以控制平台的左右电机以及伺服电机来进行转向,指导行车速度和执行转弯等动作,并对前方道路做出预测判断。
2 硬件模块——主板及驱动板原理设计
我们主要设计电源管理模块、道路信息采集与方向控制模块、速度控制与测速模块。通过实验的一系列对比,最终选择出了一系列可供使用的稳压芯片用于自寻迹平台进行稳压,供电主体选择7.2V,在其他模块供电会采用稳压芯片降低到5.0V或3.3V供相应的模块使用。
在驱动上选择了N-MOS管驱动,NMOS导通需要GS有一个正压,导通时,必须通过自举电容来获取GS的正压,PMOS导通GS需要一个负压,即G端电压要小于S端电压,这样IC实现起来就很方便了。但是PMOS导通压降大,效率低,PMOS的同态电阻比NMOS大,输入电压低,而且还有成本问题,价格低廉且替换种类较多,因而驱动中往往选择N-MOS管。
经过对比终选择NMOS驱动电路。所选MOS管最大内阻仅为3.3mΩ,其电流量大,加减速性能好,使用贴片型同样也可以使驱动电路很简洁。由于流过电机的电流相对较大,在绘制驱动电路PCB时,通过大电流的线路要尽量短粗,并且尽量避免经过过孔,如果要经过过孔的话要把过孔做大一些(>1mm)并且在焊盘上做一圈小的过孔,在焊接时用焊锡填满,否则可能会烧断。
3 机械结构
实际调试中自寻迹平台时常出现的问题主要有轮胎抓地力不足,前轮大角迟缓的问题,经分析大多与轮胎安装角度有关,涉及到一个非常重要的转向轮位置角度定位问题,叫做“前轮定位”。前轮定位的主要目的在于提高车模的转向控制的灵敏性和提高车模的抓地力,主要包括:主销后倾、主销内倾和前轮前束。根据轮胎摩擦程度的实际情况及自寻迹平台各个部分的布局合理设想了几种平台搭建方式来进一步优化整车重心,防止在过弯时平台会发生抖动或者甩尾的情况。在经过很多次尝试后调整到了一个保证我们的平台性能相对稳定的高度。
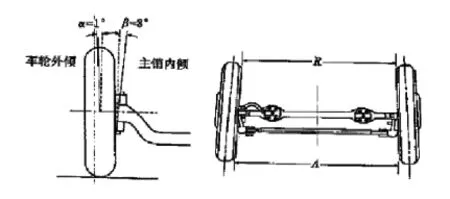
图1
因为自寻迹平台既需要合理的中心分布以及优良的转向性能,我们对伺服电机安装结构进行了一定调整:自寻迹平台的转向是通过伺服电机带动左右横拉杆实现,伺服电机的功率和转速等参数都是固定的,要想加快转向机构的响应速度,所能处理的就是左右横拉杆的长度。根据杠杆原理,将与伺服电机连接的加长舵机臂以获得更长的力臂,再将转向传动杆连接在加长的输出盘的末端,在伺服电机相同的转动角度下,可以取得更明显的转向效果,其响应速度获得了极大的提升。结合伺服电机重心,构件安装等问题最终结合伺服电机重心,构件安装等问题最终结合伺服电机重心,构件安装等问题最终使用了立式安装。
4 软件编程体系
完善的软件控制系统是自寻迹平台稳定运行的核心。通过使用数字式摄像头采集赛道信息,并对采集的图像进行矫正处理,以获取准确的道路信息。通过分析采集到的图像数据,对自寻迹平台的转向和速度进行控制,使用经典PID控制算法,并结合实际情况不断完善修改,实现对摄像头智能车的精确控制。
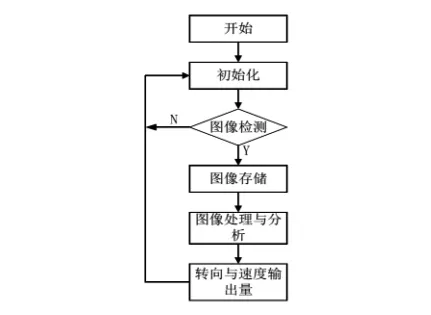
图2 程序框架示意图
对我们的自寻迹平台来说程序编写需要注意的问题主要有两条:
其一为速度控制,速度选用闭环控制方式。通过闭环反馈使系统的精确度提高,响应时间缩短,控制稳定性高。而开环控制没有反馈环节,稳定性、精确度不高。为了达到好的速度控制效果,速度要选用闭环方式。而使用PID控制算法能够很好的控制小车的运行速度,并且在运行过程中也非常稳定。

图3 闭环的P I D控制示意图
其二则为转向控制,提前判断道路,需要自寻迹平台具有更远的视野范围,而视野范围越长,计算中线时越可能受到赛道周围或其他信号的干扰而使自寻迹平台运行出错,所以在控制舵机时要通过软件消除。当计算出新的中线信息时,要与上次计算值进行比较,防止运行时出现较大错误。转向控制根据视野范围不同参数不同,需要根据自寻迹平台运行表现做相应的调整,远端的参数影响入弯的时机,但也影响自寻迹平台运行在直道和弯道时的稳定性,近端的参数影响过弯的路线,这些参数需要经过反复调试才能得到较完美的参数。
5 实用性检验
自寻迹平台制作结束后,我们对平台的实用性进行了测试,我们先对整个平台的的硬件电路进行了检查,确认各模块功能正常后在测试场地内进行自寻迹平台的避障测试。为了保证测试的效果,我们进行了7次避障测试,测试结果如下表格所示。
经过测试我们的自寻迹平台运行完成的成功率达到了100%,避障成功率达到了71.4%,达到了我们的预期目标,这也表明了我们所设计的自寻迹平台的实用性极高。
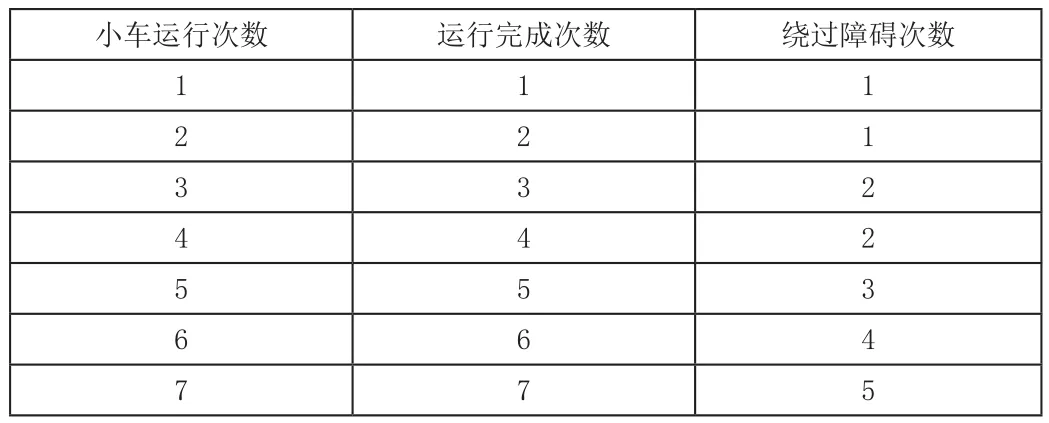
表1 小车运行情况表
[1]周文军.双轮驱动智能小车循迹算法研究[J].河北软件职业技术学院学报,2014,16(2):58-60.
[2]许苑丰.一种智能循迹小车设计方案[J].电子产品世界,2013(11):47-49.
[3]赵敏超.智能寻迹运货小自寻迹平台型的研究[J].科技向导,2010(27):74-75.
[4]隋金雪,杨莉,张岩.“飞思卡尔”杯—智能汽车设计与实例教程[M].北京:电子工业出版社,2014.
[5]闫琪,王江.智能车设计—“飞思卡尔杯”从入门到精通[M].北京:北京航空航天大学出版社,2014.
[6]Hui Zhang.Control Strategy Design for Smart Car Auto-tracing with Visual[J].Journal of Materials Processing Technology,2007(3):12-65.
[7]Jie SUN,Zhao-hui WU,Gang PAN.Context-aware smart car:from model to prototype[J].Sun et al.J Zhejiang Univ SCI A,2009(7):1049-1059.
