基于图像多分辨率与运动控制卡的线阵相机快速定位算法∗
2017-08-01陈大伟闵改
陈大伟 闵改
(1.平顶山教育学院计算机系平顶山467000)(2.平顶山学院信息工程学院平顶山467000)
基于图像多分辨率与运动控制卡的线阵相机快速定位算法∗
陈大伟1闵改2
(1.平顶山教育学院计算机系平顶山467000)(2.平顶山学院信息工程学院平顶山467000)
为了解决当前线阵相机宽幅面采集图像时,存在图像数据过大影响系统处理速度与精度的问题,论文提出了基于图像多分辨率与运动控制卡的线阵相机快速定位算法。首先,采用高斯金字塔结构对图像进行多分辨率处理,对较高层的低分辨率图像进行surf角点匹配,完成对目标区域的快速定位。然后,基于凌华运动控制卡开发包函数,对Dalsa线阵相机与图像采集卡SDK进行二次开发,完成图像数据深度采集,实现线阵相机快速定位。实验测试结果显示:与当前图像采集定位技术相比,在面对大数据图像时,论文算法拥有更高的处理效率与准确度。
线阵相机定位;多分辨率;高斯金字塔结构;二次开发;运动控制卡
Class NumberTP391
1 引言
随着电子制造检查要求不断提高,先对大面积产品目标进行全局图像采集和局部图像深化采集,然后再进行各种视觉检查与测量,这一过程已成发展趋势[1~2]。但是由于全局图像数据量过大,这对快速准确地定位图像目标区域提出了新的挑战,尤其是随着线阵相机的推广使用,这一需求亟待技术上实现[3~4]。由于线阵相机的成像原理,对宽幅面的目标采集,具有得天独厚的优势,即在水平方向可以无限采集,而且成像均匀清晰。但是,采集的图像数据非常大,一般可以达到100M每帧图像。为了解决这个问题,达到对线阵图像目标区域的快速定位,本文提出了基于运动控制卡与图像金字塔结构多分辨率处理的线阵相机图像目标快速定位系统。
专门对线阵图像进行快速定位研究很少,但是在普通相机目标快速定位识别方面,国内研究人员已经将图像处理与计算机视觉技术引入到该领域中,对其展开研究,其图像处理原理与前者相同,如赵振杰[5]提出了基于筛选机制的快速概率占据图目标定位系统,能够快速准确地计算出进入场景中运动物体的位置。具体而言,首先设计了一种高效的筛选机制,可以根据运动检测的结果,粗略估计出运动目标在三维空间中的位置,然后建立合适的似然模型,利用贝叶斯方法计算出目标出现在备选区域内各个位置上的概率,从而找到目标物体;最后,通过阈值化概率图的方法得到目标的位置信息,并采用粒子滤波器对定位结果进行校正,以进一步提高定位的准确度,达到了图像目标快速定位目的。但是,此技术依靠预先设定贝叶斯复杂模型,在图像数据量大时,其模型构建往往缺乏准确性,导致定位错位和速度过慢。
如张娟[6]提出了视频监测区的特定视觉特征快速定位系统,通过混合高斯背景模型构建视频监测区多态散布模型,对监测区域的视频图像进行去噪处理,并提取视频图像颜色特征,利用颜色直方图Euler距离实现特定图像特征的跟踪匹配,实现对视觉检测区域的特定视觉特征快速识别定位,达到了图像目标快速定位目的。但是,此技术依靠图像简单的像素数据结构,推理出颜色灰度规律,在图像数据量复杂时,其推理往往缺乏适用性,导致定位错位和速度过慢。
对此,为了提高目标快速定位系统的实用性,本文提出了基于图像多分辨率处理与运动控制卡的快速定位技术,给出了软硬件的解决方案,最后,测试了本文算法的准确性。
2 本文线阵相机快速定位算法
本文算法的架构流程见图1。该算法首先初始化线阵相机采集全局图像、建立图像金字塔结构,完成多分辨率处理,对上层低分辨率图像进行Surf角点匹配,得到目标区域坐标。同时初始化运动控制卡,初始化运动参数,连接相机控制伺服与上位机软件,运动控制系统处于待命状态。最后将图像处理结果(目标区域坐标)与控制卡系统融合,控制相机运动到目标区域上方,再做深度图像采集,完成整个线阵图像快速定位的软硬件实现方案。待定位的材料全局图像如图2所示,可见图像范围大,实际达到120M,对目标快速定位带来一定的难度和障碍;而且实际感兴趣区域为下部的条码,即快速定位目标。本文后续将展开系统研究,并实验验证。
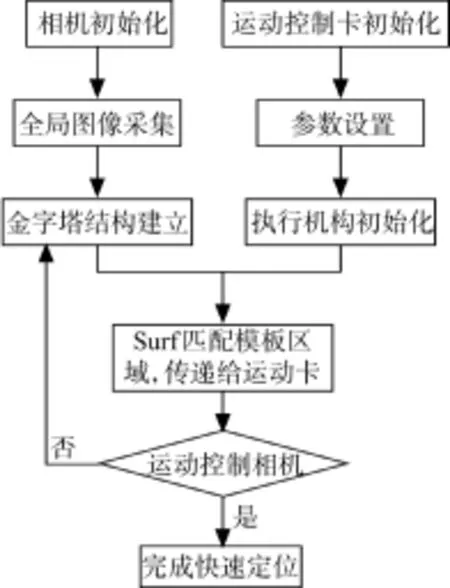
图1本文机制架构

图2待处理的全局图像
2.1 基于高斯金字塔多分辨率处理的快速区域定位
由于线阵相机采集的图像很大,一般达到100M/帧,如果对整张图像进行全局处理,不仅影响速度和精度,而且处理了不必要的冗余数据。因此,本文提出,先构建高斯金字塔图像结构,对高层图像进行快速定位,得到目标大致区域后,再返回低层图像,再对先前得到的区域做Surf角点匹配,过程见图3。

图3快速定位过程
图像金字塔结构是金字塔形状排列的分辨率逐步降低的图像集合,底部是高分辨率图像,顶部是近分辨率近似的低分辨率图像[7~8]。因此,金字塔向上移动时,尺寸和分辨率降低,快速定位区域正是基于这些图像。图像金字塔中各级图像尺寸如下式所示:
式中f(x,y)为金字塔结构中图像,j代表金字塔层数,j最大值为J,如式(2)所示,N代表图像最大分辨率大小,经分析,图像金字塔结构中所有像素和计算公式[9]如下:

其中Sum为图像金字塔结构中所有像素和,j代表金字塔层数,N代表图像最大分辨率大小。经过多分辨率处理,按上述结构,本文选取缩小16倍的层图,得到尺寸成比例缩小的子图像,进行快速处理,子图仅6M,处理速度为原来的1/16。通过Sruf角点匹配,得到目标区域的大致坐标,再以16倍换算到原图引导线阵相机到感兴趣区域,进行二次图像采集,即深度图像采集,做进一步视觉分析检查。
最后,再对定位的区域完成Surf角点匹配[10],其过程为:1)计算积分图像,即对像素左右进行加减。2)计算Hessian矩阵。3)提取兴趣点,即像素梯度值与方向达到局部最大的点。4)计算Surf描述子,并释放积分图像。
Surf角点匹配过程较简单,非本文分析重点,这里不展开说明,匹配结果如图4所示,对缩小16倍图像的角点匹配结果,以绿色圆圈标注感兴趣区域角点。
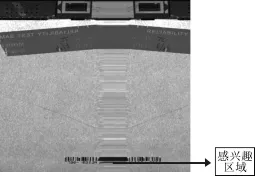
图4角点匹配结果
2.2 基于运动控制卡的线阵深度采集
得到了准确的目标区域坐标后,需要通过运动控制卡控制线阵相机伺服运动到目标区域正上方,进行深度图像采集,见图5。目前运动控制分为两种方式[11~12]:基于PC的PCI总线运动控制卡、基于PLC可编程逻辑控制器。由于运动控制卡借助PC强大功能,相较于PLC控制,运动控制卡具有更强的功能。PLC控制主要对开关量进行触发,应用简单,但是涉及直线插补轨迹控制等较复杂运算时,功能不如运动控制卡。而且运动控制卡带有完整的开发函数,可支持在PC端独立开发完成,达到与上位机客户端功能软件的对接,综合考虑,本系统采用运动控制卡,完成控制相机运动的功能。
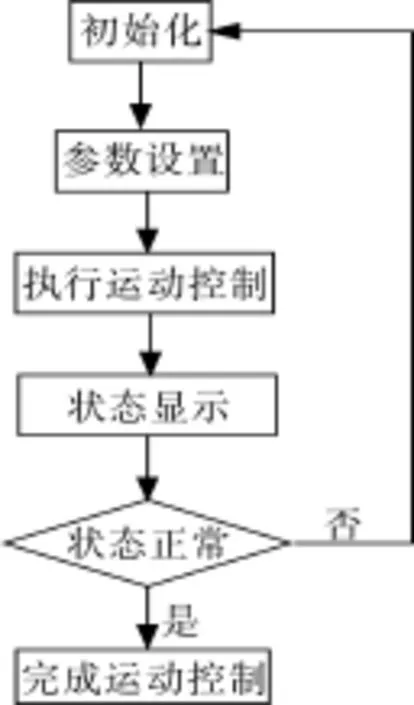
图5控制卡工作过程
基于PC、DSP、FPGA的运动控制卡,具有同步性、柔性、开放性的优势,本系统采用凌华运动控制卡[13~15],配有稳定的开发函数,经过研究分析,在此基础上二次开发:ADLink_Open()为控制卡打开;ADLink_Reset()为控制卡重启;ADLink_SetSmplTm()为控制脉冲频率;ADLink_LmtSns()为限位频率;ADLink_Closelp()为关闭控制卡,如图6所示,为本文上位机控制模块。除了常规的控制卡开启、关闭、原点复位功能外,还开发了以相对和绝对方式的速度与方向控制,达到了柔性控制运动机构的目的,可以对相机伺服进行同步随机相应控制。而其硬件架构如图7所示,视觉部分为线阵相机、镜头、光源,运动部分为滑动平台与相机伺服,两者融合构成硬件图像采集与控制系统。结合上节计算出的感兴趣区域坐标,通过运动控制卡,把相机控制运动到指定位置进行深度采集。

图6运动控制UI

图7硬件架构
3 实验与讨论
为了体现本文算法的优势,将快速定位性能较好的技术-文献[5]、文献[6]设为对照组,算法实验参数:金字塔层数为11(本文选4层,即缩小16倍)、控制卡转速为3000脉冲每秒。图8为本文算法的运行界面,其中开发了“实时采集”、“快速抓拍”、相机参数设置等功能,还有待处理的原全局图像在正中,感兴趣区域为下部的条码。
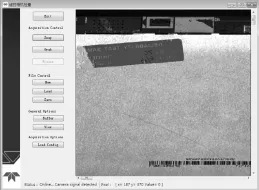
图8本文算法运行界面
本文先采集全局图像、建立图像金字塔结构,完成多分辨率处理,对上层低分辨率图像进行Surf角点匹配(如图9所示),得到目标区域坐标。最后将图像处理结果(目标区域坐标)与控制卡系统融合,完成整个线阵图像快速定位的软硬件实现方案。如图10所示,可见本文准确地定位到感兴趣区域。
而利用对照组文献[5]技术处理图8时,由于单纯依靠预先设定贝叶斯复杂模型,在图像数据量大时,其模型构建往往缺乏准确性,导致定位错位,如图11所示,出现了过多的感兴趣区域,定位结果不够准确。

图9本文匹配结果
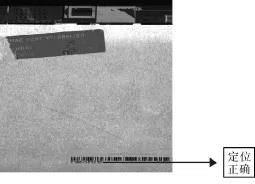
图10本文快速定位结果

图11文献[5]的定位结果
利用对照组文献[6]技术处理图8时,由于依靠图像简单的像素数据结构,推理出颜色灰度规律,在图像数据量复杂时,其推理往往缺乏适用性,导致定位错位,如图12所示,出现了过少的感兴趣区域,定位结果不够准确。

图12文献[6]的定位结果
另外,本文测试了三种算法的效率,统计了它们处理同一帧图像所用的时间,由于本文先对低分辨率图像做定位,再针对原图坐标控制相机伺服,而对照组均直接对大容量的原图处理,耗费时间过多。如图13所示,本文系统所用为对照组的1/ 16。综上所示,本文方法在效率上,相较于传统方法,具有明显的优势,同时以软硬件的方式实现了系统,本文方法具有更强的实用性。

图13定位时间对比
4 结语
为了解决线阵相机图像数据过大情况下,影响图像处理时间和定位精度的问题,本文设计了基于图像多分辨率与运动控制卡的线阵图像快速定位系统,实现对线阵图像的全局采集、金字塔结构构建、Surf角点匹配、运动控制、快速定位。实验结果表明:与当前快速定位技术相比,在面线阵相机图像数据过大的情况下,本文方法具有更好的定位精度和速度,本文在硬软件上做了集成,为实际应用做好了系统的技术准备。
[1]张超然.基于水下小平台的近场目标快速定位[J].海军工程大学学报,2016,11(17):196-199. ZHANG Chaoran.Fast localization of near field target based on underwater small platform[J].Journal of Naval University of engineering,2016,11(17):196-199
[2]唐宇.平面工件的识别与定位方法研究[J].机械设计与制造,2015,23(14):286-290. TANG Yu.Research on the method of identification and lo⁃calization of plane workpiece[J].mechanical design and manufacture,2015,23(14):286-290.
[3]Dhiraj Joshi,Andrew Gallagher,Jie Yu.Inferring photo⁃graphic location using geotagged web images[J].Multime⁃dia Tools and Applications,2012,56(1):131-153.
[4]Joshua Mati,Tokiyama Stefanie,Lisberger Stephen G.In⁃teractions between target location and reward size modu⁃late the rate of microsaccades in monkeys[J].Journal of Neurophysiology,2015,114(5):2616-2624.
[5]赵振杰.一种基于筛选机制的快速概率占据图目标定位算法[J].计算机工程与设计,2016,21(21):283-287. ZHAO Zhenjie.A fast probabilistic mapping algorithm based on screening mechanism[J].computer engineering and design,2016,21(21):283-287.
[6]张娟.视频监测区的特定视觉特征快速定位方法研究[J].计算机仿真,2015,17(32):427-430. ZHANG Juan.Fast location method of specific visual fea⁃tures in video surveillance area[J].computer simulation,2015,17(32):427-430.
[7]Wen-Shing Sun,Chuen-Lin Tien,Chien-Yue Chen.Sin⁃gle-lens camera based on a pyramid prism array to cap⁃ture four images[J].Optical Review,2013,20(2):145-152.
[8]Yannis Avrithis,Giorgos Tolias.Hough Pyramid Match⁃ing:Speeded-Up Geometry Re-ranking for Large Scale Image Retrieval[J].International Journal of Computer Vi⁃sion,2014,107(1):1-19.
[9]邢强.仿复眼的动目标位置快速估计算法[J].光子学报,2015,11(17):246-249. XING Qiang.Inspired of compound eyes fast estimation al⁃gorithm[J].Acta PHOTONICA Sinica,the target posi⁃tion,2015,11(17):246-249.
[10]李杰.基于粒子群优化的模板定位跟踪算法[J].计算机应用,2015,23(2):271-276. LI Jie.A particle swarm optimization based template lo⁃cation and tracking algorithm[J].Computer Applica⁃tions,2015,23(2):271-276.
[11]Binh Minh Nguyen,Alexander Viehweider,Hiroshi Fuji⁃moto.Basic Design of Electric Vehicle Motion Control System Using Single Antenna GPS Receiver[J].IFAC Proceedings Volumes,2013,46(21):612-619.
[12]Petr Wagner,Jan Kordas,Viktor Michna.Motion con⁃trol for robots based on cubic Hermite splines in re⁃al-time[J].IFAC Proceedings Volumes,2010,43(24):150-155.
[13]马明智,芮延年,乔冬冬.基于运动控制卡的PT运动模式研究[J].苏州大学学报(工科版),2012,32(1):48-51. MA Mingzhi,BING Yannian,Qiao Dongdong.PT move⁃ment pattern research based on motion control card[J]. Journal of Soochow University(Engineering Science Edi⁃tion),2012,32(1):48-51.
[14]杨秀增.基于FPGA的高速五轴步进电机运动控制卡设计[J].机床与液压,2012,40(4):66-68. YANG Xiuzeng.Design of motion control card for high speed five axis stepper motor based on[J].FPGA ma⁃chine tool and hydraulic,2012,40(4):66-68.
[15]Fei Wang,Yonghong Liu,Zhili Chen.Design of Three-ax⁃is ED Milling Machine Based on the PMAC Motion Card[J].Journal of Computers,2012,7(10):2496-2502.
Rapid Positioning of Linear Array Camera System Based on Multi-resolution Image and Motion Control Card
CHEN Dawei1MIN Gai2
(1.Department of Computer,Pingdingshan College of Education,Pingdingshan467000)(2.College of Information Engineering,Pingdingshan University,Pingdingshan467000)
In order to solve the linear array camera wide format image acquisition,image data of system processing speed and accuracy,this paper presents line array camera fast positioning system based on multi-resolution image and motion control card. Firstly,the image is processed by Gauss Pyramid structure,and the surf corner matching is performed to the lower resolution image of the upper level.Then,the Dalsa linear array camera and image acquisition card SDK are studied,and the data is collected for two times.Finally,based on the development of the motion control card,the development of the linear array camera control system,and coupling and fast positioning algorithm,rapid acquisition and positioning system of linear array camera are achieved.Experi⁃mental results show that compared with the current image acquisition and positioning system,in the face of large data images,the al⁃gorithm has a higher processing speed and accuracy.
line array camera positioning,multi resolution,gauss pyramid structure,two development,motion control card
TP391
10.3969/j.issn.1672-9722.2017.07.036
2017年1月11日,
2017年2月25日
陈大伟,男,讲师,研究方向:图像处理、计算机应用。闵改,女,硕士,讲师,研究方向:图像处理、计算机应用。