无人机多传感器协同探测方案设计∗
2017-08-01刘宁波周伟孙艳丽
刘宁波 周伟 孙艳丽
(1.海军航空工程学院信息融合研究所烟台264001)(2.海军航空工程学院基础实验部烟台264001)
无人机多传感器协同探测方案设计∗
刘宁波1周伟1孙艳丽2
(1.海军航空工程学院信息融合研究所烟台264001)(2.海军航空工程学院基础实验部烟台264001)
研究多传感器间两两协同或三者协同探测的适用范围、工作方式和侦察过程,分析异类传感器协同探测的可行性,提出三种典型侦察任务模型的无人机多传感器协同探测技术方案,从而有效提高无人机侦察效能。
无人机;协同探测;多传感器
Class NumberTP391
1 引言
无人侦察机对目标的成功搜索是其侦察探测的必要前提,它有赖于多方面的结合,包括侦察传感器性能、多传感器协同方式、信息处理能力等。在无人侦察机的活动中,多传感器协同探测方案是研究的关注点。无人机根据侦察任务需求,通过合理规划设计侦察传感器的协同探测方案,可以利用有限的传感器资源在最短时间内以最大可能发现目标,获得质量最优的目标侦察图像,得到理想的侦察效果。本文对无人侦察机侦察方式及航路规划、多传感器系统信息交互融合、多传感器协同探测效能评估等内容进行简要介绍,通过研究多传感器间两两协同及三者协同探测的适用范围和工作过程,分析异类传感器协同探测的合理性和可行性,设计典型侦察任务模型的多传感器协同探测技术方案。
2 异类传感器协同的可行性分析
2.1 电子侦察设备与SAR协同
电子侦察设备与SAR的协同,利用电子侦察设备提供大致定位,SAR再进行精确侦察,主要用于对静态目标的侦察和精确定位[1]。电子侦察设备及SAR协同探测过程如图1所示,电子侦察设备在200km以上的距离上发现辐射源,将捕获的信息发送至数据处理终端,经数据处理后送至无人机控制设备,操纵无人机改变航路并采用电子侦察和条带SAR协同,对静态目标精确定位和观测;至距离辐射源50km时,聚束SAR模式打开,更长时间地凝视目标,增强在复杂背景下对目标进行高分辨率成像观测的能力。

图1电子侦察与CCD相机协同探测示意图
2.2 电子侦察设备与CCD相机协同
电子侦察设备与CCD相机的协同,主要用于对目标区域进行即时可视的侦察或拍摄目标图像发至指控端进一步采集数据[2]。电子侦察设备及CCD相机协同探测过程如图2所示,电子侦察设备在200km以上的距离上发现辐射源,指控端操纵无人机改变航路靠近辐射源目标,当无人机到达距离目标40km左右的范围时,CCD相机开始工作,同电子侦察设备协同观测目标,抵近目标区域20km以内后拍摄高分辨率的彩色图像或对目标即时可视侦察。

图2电子侦察与SAR协同探测示意图
2.3 SAR与CCD相机协同
SAR和CCD相机之间的协同,主要用于对动目标的跟踪定位和探测成像。SAR和CCD二者协同探测过程如图3所示,SAR运用GMTI模式或同时GMTI/SAR模式在50km范围内对目标区域进行扫描,实现对动目标的检测和跟踪。由于SAR图像判读的复杂性,为增强对目标的检测能力或对动目标即时可视侦察,无人机改变航路抵近目标20km处,开始CCD相机扫描侦察。

图3SAR与CCD相机协同探测示意图
2.4 三种传感器的协同
无人机电子侦察设备、SAR、CCD相机三者协同,主要是对目标的精确定位和观测成像,以及对目标的特征检测等[3]。电子侦察设备、SAR和CCD相机三者协同探测过程如图4所示。电子侦察设备在200km的距离侦察到目标辐射源的位置,引导无人机改变航路靠近目标区域。若目标为固定目标时,运用条带/聚束SAR或CCD相机分别在距离目标50km、20km范围内对目标进行成像或即时可视侦察;若目标为运动目标,则运用GMTI、GMTI/ SAR或CCD相机分别在距离目标50km、20km范围内对目标进行跟踪和即时可视侦察。若电子侦察设备未发现目标,可运用SAR大范围条带扫描探测,再行其他侦察方案。
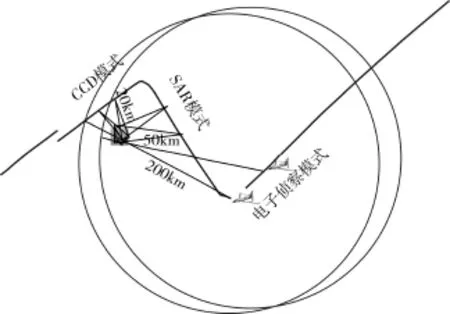
图4三种传感器协同探测示意图
3 多传感器协同探测技术方案设计
3.1 协同方案设计整体思路
航路与传感器规划是无人机任务规划系统的重要组成部分。作为协同探测任务系统的两个重要模块,航路与传感器规划之间存在紧密的耦合关系[4]。如何有效设计航路与传感器使用规划,是研究无人机多传感器协同探测问题的关键。
3.1.1 无人机航路规划
无人机的航路规划与无人机的侦察方式及机载多传感器的协同工作方式都有着紧密的关系。为适应无人侦察机及多种传感器的性能需求和工作特点,达到预期的侦察目的,在设计多传感器协同探测方案时,对无人侦察机的航路需要进行一定的分析与规划。航路的优劣将直接关系到无人机平台的安全及侦察任务的完成情况,合理的路径规划能够有效节约侦察成本,更好地提升效率[5]。
3.1.2 传感器使用规划
在对传感器资源的管理分配上,要充分考虑许多的约束条件,包括平台性能、飞行环境、传感器约束、目标约束、时间约束等。无人机携带多种传感器,根据一定的原则选择合适的传感器协同工作,将有效提升无人机的侦察效能。图5给出简单的传感器使用的选择依据。
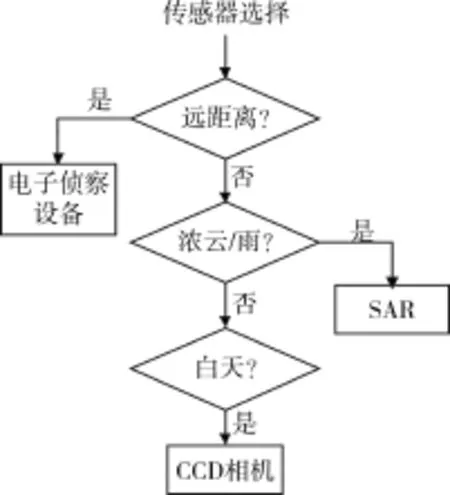
图5传感器使用选择依据
在设计多传感器协同探测方案时,根据不同任务模型和侦察传感器的特点合理配置传感器使用,利用电子信号侦察设备远距离、宽领域的能力来提高侦察效率,把SAR作为侦察的主力完成目标探测,CCD相机则为两者做出补充。较好地发挥各传感器的优势,提高协同探测方案的可行性。
3.2 目标查证任务模型的协同探测方案
无人机对上级指定目标或区域侦察,从其他的情报途径得到待侦察目标或可疑目标区域的粗略坐标信息,执行目标查证作战任务。一般选用“—字形”或“8字形”航路,电子侦察设备根据指控端输入的信息重点扫描某一目标区域,实时获取目标的方位和距离信息。无人机在电子侦察设备所侦测的坐标引导下,向目标辐射源靠近,执行侦察机动。根据任务区域气象情况、无人机飞行环境、传感器作用范围及目标的状态等条件,合理规划航路及传感器配置。理想情景下,无人机到达SAR的工作距离后,选择SAR指令,根据任务需求运用不同工作模式,对目标进行精确定位和较高分辨率的成像侦察[6~8];或为进一步侦测目标,无人机继续抵近目标,到达CCD相机探测范围后,选择CCD指令,CCD相机对目标进行即时可视侦察,或拍摄高分辨率图像并将其发回指控端进行情报分析。无人机执行完对敌目标的侦察任务后返航,其过程如图6所示。

图6目标查证侦察模式协同方案流程图
3.3 目标搜索任务模型的协同探测方案
无人侦察机对所担负侦察监视任务的大区域进行例行性的常规侦察,完成目标搜索的作战任务,一般选用“z字形”航路。无人机电子侦察设备在大范围、宽频带、远距离上进行电磁信号的搜索,及时捕获辐射源的电磁信号并进行电磁频谱特性分析。将信号分析结果与数据库比对,判别辐射源的信息,完成对辐射源大致定位,并进行威胁分析和态势判别。若判断辐射源为民用或我方装备,无人机放弃对其采取进一步侦察行动,继续常规巡航;若判断辐射源为敌方或无法明确判别,无人机在电子侦察设备所获坐标信息的引导下,向目标辐射源靠近,到达SAR的工作距离后,选择SAR侦察指令,根据任务需求运用相应任务模式,对目标进行精确定位和高分辨率成像侦察;或为进一步侦测目标并对目标即时可视侦察,无人机继续抵近目标,到达CCD相机工作范围后,选择CCD相机侦察指令,CCD相机拍摄高分辨率的彩色或黑白图像,并将其发回指控端进行情报分析。无人机执行完对敌目标的侦察任务后继续巡航或返航,其过程如图7所示。

图7目标搜索任务模型协同方案流程图
3.4 区域监视任务模型的协同探测方案
无人机对上级指定目标区域侦察,执行对特定目标区域的长时间监视任务时,根据指定坐标抵近目标区域,以“8字形”航路或“—字形”航路绕行目标区域实施侦察监控。电子侦察设备对目标区域内的目标进行搜索、识别和标记;为解决区域内敌方目标无线电静默问题,根据不同指令,无人机分别运用条带SAR对目标区域进行大面积扫描,或运用聚束SAR对区域内重点目标进行侦测;也可根据实际任务需求和环境状况对目标区域进行CCD相机“锥扫”,或SAR与CCD相机协同,完成对重点目标信息的分析和查证。之后根据指令无人机继续巡航或返航,完成对目标区域的侦察监视任务,其过程如图8所示。

图8区域监视任务模型协同方案流程图
4 多传感器协同探测的效能评估
无人机多传感器协同探测的作战效能,与无人机平台及其载荷性能相关,也与载荷的协同运用方式有密切关系。对其作战效能的评估,有助于对无人机平台及其载荷装备性能的检测和对协同探测方案的研究。
常见的作战效能评估方法有ADC法、SEA法、指数法等。其中,ADC法作为武器装备系统效能评估常用方法之一,在无人机多传感器协同探测的效能评估时多被采用。其核心思想是侦察效能与可用度(A,与传感器及其平台的维修性、可信赖性等有关)、可信度(D,与侦察装备及其系统的可信性、可修复性等有关)以及侦察作战能力(C)三个因素有关[9]。
对无人机多传感器协同探测效能的评估,通常可选取与侦察相关的若干项目来实施。记E为侦察效能,则其模型为:

具体表示为

式中:Aˉ为侦察能力参数;εˉs为生存能力参数;Bˉ为机动能力参数;εˉj为平台能力参数;ωA、ωs、ωB、ωj为各项能力参数的权重系数。
应用ADC法对无人机作战效能评估的基本步骤为首先确定侦察能力向量A、确定机动能力矩阵D、确定平台能力矩阵ε,然后根据计算的每个能力向量的权重,得到最终的效能评估值。完成效能评估需要考虑的方面众多,在此只做简要概述,为无人机多传感器协同探测方案的可行性检测寻找方法。
5 结语
本文设计目标查证、目标搜索和区域监视等典型侦察任务模型的多传感器协同探测技术方案。不同的侦察传感器具有不同的适用范围,无人侦察机为完成对不同类型目标的侦察探测任务,需要装载多种传感器协同工作。根据传感器使用特点、协同工作方式类型以及具体作战任务情景,合理设计多传感器协同探测技术方案,达到预期目标。
[1]尹航,李少洪.无人机多传感器集成与数据融合[J].现代防御技术,2004(2):47-50. YIN Hang,LI Shaohong.Multisensor integration and data fusion of UAV system[J].Modern Defense Technology,2004(2):47-50.
[2]Wu Wei,Wang Guo-hong,Liu Yi,Li Shi-zhong.Airborne Radar/IRST/ESM Synergistic Tracking and Management[J].Systems Engineering and Electronics(S1001-506X),2011,33(7):1517-1522.
[3](美)Tal Shima,Steven Rasmussen著.刘忠,彭鹏飞等译.无人机协同决策与控制——面临的挑战与时间应用[M].北京:国防工业出版社,2012. Tal Shima,Steven Rasmussen.UAV Cooperative Decision and Control Challenges and Practical Approaches[M]. Benjing:National Defence Industry Press,2012.
[4]睢志佳,程咏梅,杨峰.基于HLA的机载多传感器探测仿真系统设计与实现[J].系统仿真学报,2012,24(6). SUI Zhijia,CHENG Yongmei,YANG Feng.Design and Realization of Airborne Multi-sensor Simulation Detection System Based on HLA[J].Journal of System Simulation,2012,24(6).
[5]Wu Jun,Cheng Yong-mei,Pan Quan,Yang Feng,Lan Hua.Design and Implementation of Simulation Platform for Multi-Sensors Information Fusion Algorithm[C]//The 2nd International Conference on Intelligent Control and In⁃formation Processing.Harbin,China.USA:IEEE Comput⁃er Society,2011:973-977.
[6]Joseph Anderson,Lang Hong.Sensor Resource Manage⁃ment Drivenby Threat Projection and Priorities[J].Infor⁃mationSciences:(S0020-0255),2008,178(8):2007-2021.
[7]许兆林,付战平.航空CCD侦察相机系统研究[J].航空计测技术,2001(5):3-6. XU Zhaolin,FU Zhanping.Study on Aerial Reconnais⁃sance CCD Camera System[J].Aviation Metrology&Mea⁃ surement Technology,2001(5):3-6.
[8]张旺,申洋,陈伟.无人机多侦察载荷协同侦察效能评估[J].电光与控制,2014,21(3). ZHANG Wang,SHEN Yang,CHEN Wei.Assessment on Multi-Payload Collaborative Reconnaissance Effectiveness of UAVs[J].Electronics Optics&Control,2014,21(3).
[9]Liang Hong-bo,Yao Yi-ping,Mu Xiao-dong.Develop⁃ment of a HLA/RTI for High Performance Simulation[J].Advanced Materials Research(S1662-8985),2011,291-294(7):3044-3049.
Project Design for Multi-sensor Collaborative Reconnaissance of Unmanned Aerial Vehicle
LIU Ningbo1ZHOU Wei1SUN Yanli2
(1.Research Institute of Information Fusion,Naval Aeronautical and Astronautical University,Yantai264001)(2.Department of Basic Experiment,Naval Aeronautical and Astronautical University,Yantai264001)
The scope,working style and scouting process of the two or three sensors cooperative between multi-sensors were researched.The feasibility of collaborative reconnaissance between heterogeneous sensors was analyzed.Three kinds of typical multi-sensor collaborative reconnaissance technology were put forward.It would increase the reconnaissance efficiency of UAV effec⁃tively.
UAV,collaborative reconnaissance,multi-sensor
TP391
10.3969/j.issn.1672-9722.2017.07.012
2017年1月13日,
2017年2月15日
国家自然科学基金“扰动反馈作用下雷达目标与海杂波差异特性认知研究”(编号:61401495);国家自然科学基金“海上弱小目标探测信息融合新机理及方法研究”(编号:61531020)资助。
刘宁波,男,博士,讲师,研究方向:信号处理。