基于遗传算法的电动四驱汽车轴间扭矩分配控制策略
2017-07-31陈黎卿谭雨点
陈黎卿 谭雨点 吴 荣 苗 伟 胡 芳
(1.安徽农业大学工学院,合肥230036;2.合肥工业大学机械与汽车工程学院,合肥230009)
基于遗传算法的电动四驱汽车轴间扭矩分配控制策略
陈黎卿1谭雨点1吴 荣1苗 伟1胡 芳2
(1.安徽农业大学工学院,合肥230036;2.合肥工业大学机械与汽车工程学院,合肥230009)
为了提高纯电动四轮驱动汽车的整车动力性和行驶稳定性,提出一种通过对汽车前后轴转速差及车轮滑转率实时观测完成轴间扭矩重新分配的控制策略。通过Matlab/Simulink构建了整车动力学模型,并设计了基于遗传算法(GA)和PID控制的轴间扭矩分配控制系统,分别在低附着均一路面、对接路面对整车加速性能进行了仿真分析。对该轴间扭矩控制系统进行软硬件设计,并对开发的控制器进行了道路试验。结果显示运用该控制器及控制策略能较好地跟随实时路况,使车辆动力性和行驶稳定性得到提升,试验结果也验证了控制系统的有效性。
纯电动四驱汽车;轴间扭矩分配;遗传算法;软硬件设计;控制策略
引言
四轮驱动汽车可通过分动器或轴间差速器实现汽车前、后轴的扭矩分配,从而改善车辆行驶动力性和通过性,因此针对四轮驱动汽车的驱动力分配控制一直是研究热点问题[1-5]。文献[1-2]提出了一种全时四轮驱动汽车驱动轮牵引力综合控制策略,在低附着路面上车轮过度滑转时采用发动机输出力矩控制和驱动轮制动控制的联合控制。PANZANI等[3]通过发动机节气门控制系统和轴间扭矩分配控制系统的联合控制实现轴间扭矩的分配控制。胡建军等[4]通过发动机目标转矩控制和限滑差速器控制来调节各驱动轮的驱动力矩,并进行仿真分析。陈黎卿等[5]提出了一种基于人群搜索算法的四驱汽车扭矩分配控制策略,探讨了轴间和轮间扭矩分配对整车行驶稳定性的影响。此外诸多学者还在混合动力汽车四轮扭矩控制策略在转向控制和限滑等方面开展了研究,并取得了一系列研究成果[6-12]。通过对现有国内外学者研究成果分析可知,混合动力、传统燃油汽车等类型车辆的驱动力分配控制策略研究已取得了显著成果,但对于电动四驱汽车轴间动力分配以及控制系统研发尚需进一步研究。
采用合适的控制策略和设计良好的控制器是充分发挥控制对象性能的关键,但控制器参数较多,仅依靠现有经验知识选择和调试参数,很难设计出优良的控制器。对此吴光强等[13]将遗传算法应用到对混合动力汽车的多参数优化问题中,取得了良好的效果。王威等[14]采用基于遗传算法优化后的PID控制方法对汽车主动悬架进行控制取得了良好成效,提高了乘坐舒适性。因此,本文充分利用遗传算法全局搜索能力,对PID控制器参数进行优化,并对优化前后的控制效果进行对比分析。
本文以纯电动四驱汽车电控分动器为研究对象,创建整车动力学模型,在此基础上研究轴间扭矩分配对整车性能的影响,并设计电控分动器控制策略和控制器软硬件。
1 电动四轮驱动汽车模型建立
1.1 整车数学模型
由于汽车运动情况的复杂性,在建立整车动力学模型时,做以下简化:忽略汽车加速和制动运行时的整车质心偏移。根据车辆的运动状态和具体受力情况,四轮驱动汽车整车模型如图1所示。

图1 四轮驱动汽车整车模型Fig.1 Four-wheel drive automobilemodel
由图1得整车动力学方程为

式中 m——整车质量 A——迎风面积
CD——空气阻力系数
Jz——整车绕Z轴的转动惯量
f1、f2、f3、f4——左前轮、右前轮、左后轮、右后轮的滚动阻力系数
Fz1、Fz2、Fz3、Fz4——左前轮、右前轮、左后轮、右后轮的动载荷
αx——纵向加速度 αy——侧向加速度

Fx1、Fx2、Fx3、Fx4——左前轮、右前轮、左后轮、右后轮纵向力
Fy1、Fy2、Fy3、Fy4——左前轮、右前轮、左后轮、右后轮侧向力
df、dr——前、后轮距
lf、lr——前、后轮与整车质心的距离
vx——纵向速度 vy——侧向速度
σf——前轮转角
1.2 传动系统模型
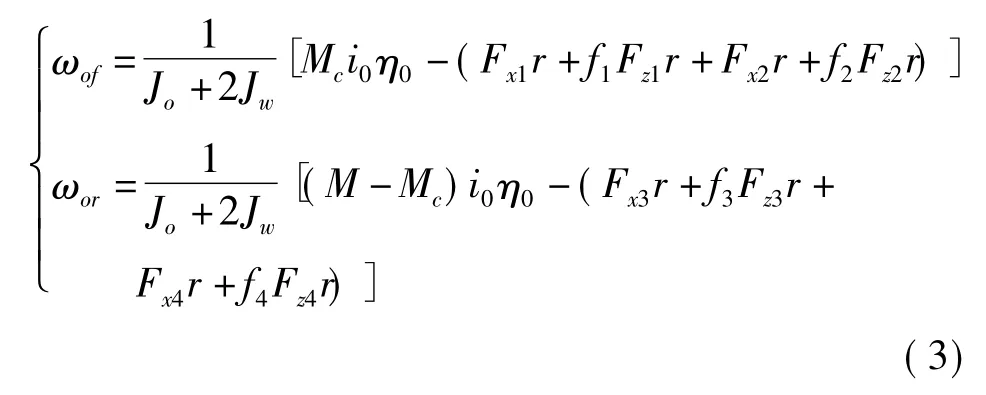
文中讨论的电动四驱汽车传动系统结构示意图如图2所示,主要由电动机、变速器、分动器、前后主减速器、前后桥差速器、半轴及驱动轮等部件组成。

图2 动力传动系模型Fig.2 Power transmission system model
经电控分动器输出的扭矩传递到前后驱动桥,其分配关系可表达为
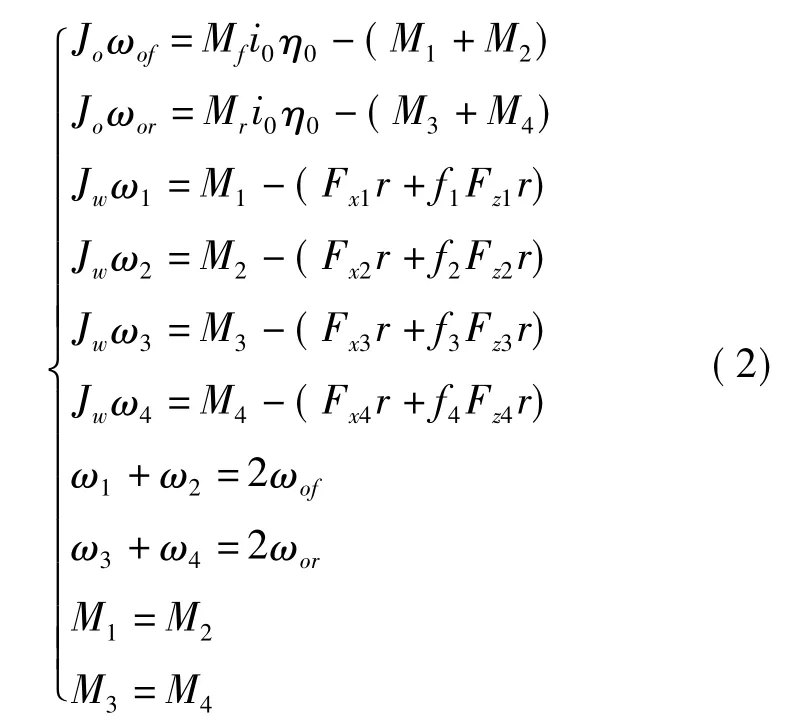
其中
式中 Jo、Jw——传动轴与主减速、半轴与车轮的转动惯量
M——分动器输入转矩
Mc——分动器前输出轴扭矩
Mf——前桥输入扭矩
Mr——后桥输入扭矩
i0——前后主减速器转动比
η0——分动器到主减速器传动效率
ω1、ω2、ω3、ω4——左前轮、右前轮、左后轮、右后轮的角加速度
M1、M2、M3、M4——左前轮、右前轮、左后轮、右后轮的转矩
r——轮胎半径
ωof、ωor——前后差速器壳体的角加速度
1.3 轮胎模型
由于主要考虑动力性影响,该特性主要由轮胎纵向附着力决定,故采用Dugoff轮胎模型。
驱动轮滑转率为[13]

地面给车轮的驱动力为

式中 ω——驱动轮角速度
v——实际车速
μ——地面与轮胎之间的摩擦因数
c——轮胎纵向刚度
Fz——驱动轮轮荷
1.4 路面附着系数估计法
为了讨论动力分配对整车动力性的影响,因此主要讨论车辆直线行驶工况,忽略车辆的坡道阻力,根据纵向驱动力及行驶阻力模型可得

式中 Fw——空气阻力 Ff——滚动阻力
Td——车辆驱动力矩
ax——车辆纵向加速度
根据车辆单轮模型得出车轮滚动方程

式中 Iw——转动惯量 ωj——角加速度
可得车辆车轮与地面纵向作用力Fx

式中 kw——风阻系数
忽略侧载荷转移的情况,车辆所受垂向力为

式中 L1、L2——车辆质心与前、后轴的距离
hg——车辆的质心高度
g——重力加速度
路面附着系数的计算公式为

1.5 滑转率计算
车辆行驶过程中,滑转率和附着系数之间的关系可用KIENTCH[15]提出的模型公式表示

式中 p1、p2——不同路况下轮胎地面附着估计值
λ——车轮滑转率
ε——调试系数
通过路面附着系数估计法和KIENTCH模型可得出当前路面的最优滑转率[16]。通过实时监测前后轮的转速差,调节电控分动器输入的电流值进而改变前后轴转矩的分配,提高行驶的动力性。
2 动力分配控制策略设计
2.1 电控分动器工作原理
电控分动器中的电磁离合器由控制离合器、湿式多片式离合器、衔铁、线圈、主凸轮和球组成。它利用ECU(电子控制单元)控制通过线圈的电流使线圈、控制离合器产生电磁力,移动衔铁使摩擦片被压紧,通过产生的摩擦力矩使电控分动器实现扭矩的不同分配,根据输出电流可产生相应的扭矩[17],电控分动器模型如图3所示。
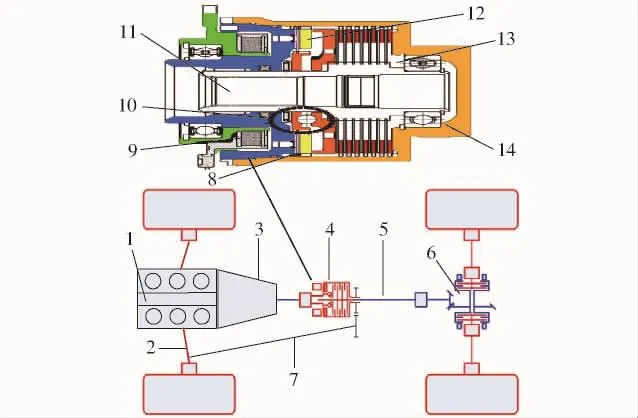
图3 电控分动器模型Fig.3 Electronic control of actuatormodel
电控分动器产生的扭矩为

式中 Ms——电控分动器产生的扭矩
C——分动器本身的结构参数
I——电控分动器内线圈的电流
实车中经传感器得到车速信号、加速度信号、前后轴的转速信号;根据车辆模型部分的车速和轴速判断车辆是否出现滑转,然后计算出路面附着系数及目标滑转率,ECU通过判断前后的转速差对分动器输入电流进行扭矩分配,使其行驶的滑转率尽量靠近目标滑转率,最终使前后轴转速相同。
2.2 控制策略设计
控制输入量为误差α(t)和输出电流变化量ΔI。前后传动轴角速度差为

式中 ω0f、ω0r——前、后差速器壳体的角速度
控制器输入误差为

式中 ωr0——目标转速差,ωr0=0控制器输出的电流变化量为

采用遗传算法(Genetic algorithm,GA)对PID参数进行在线寻优,在前后轴存在转速差时会实时控制输出变量对前后轴的输出转矩自行修正,扭矩控制系统如图4所示。图中ωr1为前后轴转速差。

图4 控制系统原理图Fig.4 Principle block diagram of control system
2.3 不同路况的仿真分析
2.3.1 低附着系数路面仿真分析
设定附着系数为0.2的低附着均一路面,初速度为3m/s,结果如图5所示。
图5 低附着系数仿真结果Fig.5 Simulation results of low adhesion coefficient
由图5a可知等扭矩分配时,车辆在1.27 s时转速差达到最大19.32 rad/s,说明前轮出现明显的打滑;而PID控制转速差最大时为1.74 rad/s,GA-PID为0.23 rad/s;因此GA-PID控制相对更好地抑制了车轮的打滑现象;图5b中等扭矩分配时前轮滑转率达到0.694,而后轮滑转率为0.531,可以看出前轮打滑更为严重,由于前轮的动载荷更大,当分配同样的力矩时,前轮更容易打滑;PID控制和GA-PID控制滑转率都较低,两者相比,PID控制时的后轮仍有部分滑转,滑转率最大为0.167。
2.3.2 对接路面仿真分析
在附着系数为0.8的高附着路面驶向附着系数为0.2的低附着路面,初速度为3 m/s时的结果如图6所示。

图6 对接路面仿真结果Fig.6 Simulation results on split and opposite roads
对接路面仿真过程0.5 s时前轮从高附着路面到低附着路面,1.46 s时后轮从高附着路面到低附着路面。驱动轮从高附着路面进入低附着路面过程中由图6a可知,等扭矩分配在0.97 s时驱动轮过度滑转,前后转速差达到最大20.31 rad/s。PID和GAPID控制都很好地抑制车轮打滑现象,PID控制转速差最大为 2.61 rad/s,GA-PID为 0.21 rad/s;图6b中等扭矩分配时前轮的滑转率达到了0.604,同前一工况相比,此时的后轮没有出现较明显的打滑,由于后轮驶上低附着路面之前汽车已经换挡,轮胎产生的驱动力没有超过地面附着力;PID控制和GA-PID控制都将滑转率控制较低,PID控制的后轮滑转率相对较大,在2.32 s时达到最大为0.103; GA-PID前后轮滑转率均较低,抑制了驱动轮滑转,相比其他2种控制效果较好。
3 试验验证
3.1 控制系统软硬件开发
该控制系统硬件以MC9S12XS256CAA为控制核心,设计了控制器核心电路、电源电路、复位及BDM电路、电磁线圈驱动电路、输出信号电路以及CAN总线通信电路,并对控制系统PCB硬件中增加了抗干扰设计。以CodeWarrior为平台,对控制系统软件框架、CAN总线通信程序、数据采集程序、PWM驱动程序等进行设计。分动器轴间扭矩控制系统硬件、软件框架如图7所示。

图7 控制器Fig.7 Control system unit
3.2 试验测试
为了对纯电动四驱车辆轴间扭矩分配控制器及控制策略进行功能验证,将开发的控制器安装在自制电动四轮驱动汽车进行道路试验,测试设备为VG440-200型惯性测量系统、KD-10AGPS型速度传感器。
测试试验方案:将开发的控制器安装到自制四轮驱动试验车上,在试验车道总长为60m对接路面进行试验,试验路面0~30m为水泥路面,30~60m为冰面,试验车起步加速通过水泥路面,通过冰面10m后进行制动至车辆停止。
测试试验原理及条件:将各种传感器、NI PXI主机、电源适配器、PC机等安装到自制电动四驱车上进行试验,通过传感器测得数据信号传递到NI PXI-6122采集卡,并基于LabView编程的实车试验数据采集系统进行实车数据采集,测试试验原理如图8所示。试验的对接路面是从水泥路面驶向冰面进行的,试验结果如图9所示。
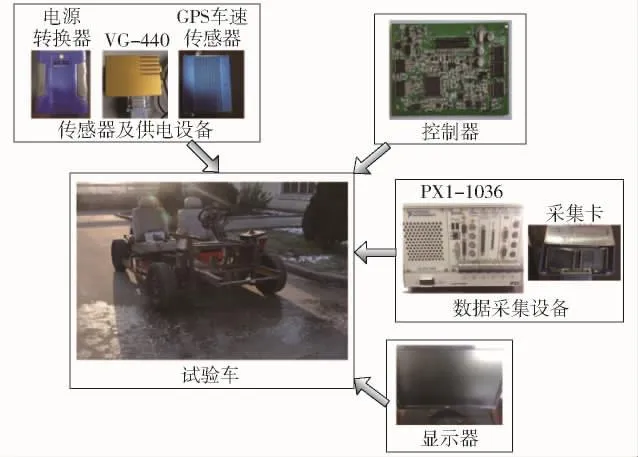
图8 控制器实车试验Fig.8 Real vehicle test of controller

图9 试验车辆加速度Fig.9 Acceleration under different controls of test car
图9为试验车在水泥路面驶向冰面的道路试验对比结果,四轮驱动试验车在控制器控制下,前14.04 s是水泥路面行驶,4.47 s开始起步加速,其加速度最大值为1.334m/s2,14.04 s进入冰面后,路面附着力减小,使加速度缓慢降低,车轮无明显打滑,15.49 s之后进行制动至试验结束。而无控制器控制下试验车6.48 s开始起步加速,14.10 s加速度最大值为1.032m/s2,16.64 s进入冰面,车轮出现明显打滑,加速度出现急剧下降,17.18 s进行制动至试验结束。通过试验验证可以得到,控制效果较好。
4 结论
(1)提出了基于GA-PID控制算法的扭矩分配控制策略,并对低附着均一路面及对接路面进行了仿真验证,仿真结果表明该控制系统能较好改善汽车动力性及行驶稳定性。
(2)对基于GA-PID控制算法的扭矩分配控制系统进行软硬件设计及部分性能调试,通过自制四驱汽车在试验条件下对开发的控制器进行试验验证,结果表明运用该控制器及控制策略能够使整车动力性得到有效改善。
1 高阳,李静,赵健,等.全时四轮驱动汽车驱动轮牵引力综合控制策略[J].吉林大学学报:工学版,2009,39(2):296-299.GAO Yang,LI Jing,ZHAO Jian,et al.Full time four wheel drive car wheel traction control strategy[J].Journal of Jilin University:Engineering and Technology Edition,2009,39(2):296-299.(in Chinese)
2 李静,李幼德,赵健,等.四轮驱动汽车牵引力控制算法[J].机械工程学报,2006,42(2):141-144.LIJing,LIYoude,ZHAO Jian,et al.Four wheel drive vehicle traction control algorithm[J].Chinese Journal of Mechanical Engineering,2006,42(2):141-144.(in Chinese)
3 PANZANIG,CORNOM,TANELLIM,etal.Designing on-demand four-wheel-drive vehicles via active controlof the central transfer case[J].IEEE Transactions on Intelligent Transportation Systems,2011,11(4):931-941.
4 胡建军,杨振辉,刘辉,等.四轮驱动汽车车轮驱动防滑的牵引力控制仿真分析[J].中国机械工程,2014,25(13):1817-1823.HU Jianjun,YANG Zhenhui,LIU Hui,et al.The simulation analysis of the traction control of the four wheel drive vehicle wheel drive[J].China Mechanical Engineering,2014,25(13):1817-1823.(in Chinese)
5 陈黎卿,胡冬宝,陈无畏.基于人群搜索算法的四驱汽车扭矩分配控制策略[J/OL].农业机械学报,2015,46(11):369-376.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20151150&flag=1.DOI:10.6041/j.issn.1000-1298.2015.11.050.CHEN Liqing,HU Dongbao,CHEN Wuwei.Population based search algorithm of the 4WD vehicle torque distribution control strategy[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2015,46(11):369-376.(in Chinese)
6 KIM D H,KIM JM,HWANG SH,et al.Optimal brake torque distribution for a four-wheel drive hybrid electric vehicle stability enhancement[J].Proc.IMechE Part D:Journal of Automobile Engineering,2007,221(11):1357-1366.
7 周奇勋,曹世宏,季新杰.ISG混合动力汽车控制规则优化与转矩分配策略研究[J].汽车工程,2015,37(7):751-756.ZHOU Qixun,CAO Shihong,JIXinjie.Research on the control rules optimization and torque distribation strategy for ISG hybrid electric vehicles[J].Automobile Engineering,2015,37(7):751-756.(in Chinese)
8 赵治国,顾君,余卓平.四轮驱动混合动力轿车驱动防滑控制研究[J].机械工程学报,2011,47(14):83-98.ZHAO Zhiguo,GU Jun,YU Zhuoping.Study on the antislip control of hybrid electric car driven by fourwheel drive[J].Journal of Mechanical Engineering,2011,47(14):83-98.(in Chinese)
9 朱建新,郑荣良,申其壮,等.四驱混合动力汽车车轮转矩分配策略的研究[J].汽车工程,2010,35(11):967-971.ZHU Jianxin,ZHENG Rongliang,SHEN Qizhuang,et al.4WD hybrid electric car wheel torque distribution strategy study[J].Automobile Engineering,2010,35(11):967-971.(in Chinese)
10 李熙亚,吴诰,廖俊,等.汽车ABS制动过程的道路识别[J].华南理工大学学报:自然科学版,2006,34(4):24-27.LIXiya,WU Gao,LIAO Jun,et al.Road identification of automobile ABS braking process[J].Journal of South China University of Technology:Natural Science Edition,2006,34(4):24-27.(in Chinese)
11 钱立军,邱利宏,陈朋.基于模糊PID扭矩识别的混合动力汽车优化控制[J].中国机械工程,2015,26(13):1752-1759.QIAN Lijun,QIU Lihong,CHEN Peng.Optimal control of hybrid electric vehicle based on fuzzy PID torque identification[J].China Mechanical Engineering,2015,26(13):1752-1759.(in Chinese)
12 姜立标,丘华川,吴中伟,等.四轮驱动汽车牵引力控制系统控制策略[J].北京航空航天大学学报,2016,42(11):2289-2298.JIANG Libiao,QIU Huachuan,WU Zhongwei,et al.Four wheel drive vehicle traction control strategy[J].Journal of Beijing University of Aeronautics and Astronautics,2016,42(11):2289-2298.(in Chinese)
13 吴光强,陈慧勇.基于遗传算法的混合动力汽车参数多目标优化[J].汽车工程,2009,31(1):60-64.WU Guangqiang,CHEN Huiyong.Multi-objective optimization of hybrid vehicle parameters based on genetic algorithm[J].Automotive Engineering,2009,31(1):60-64.(in Chinese)
14 王威,薛彦冰,宋玉玲,等.基于GA优化控制规则的汽车主动悬架模糊PID控制[J].振动与冲击,2012,22(3):157-162.WANGWei,XUE Yanbing,SONG Yuling,et al.Fuzzy PID control of vehicle active suspension based on GA optimal control rules[J].Vibration and Shock,2012,22(3):157-162.(in Chinese)
15 KIENTCH U.Realtime estimation of adhesion charcacteristic between tires and road[C]∥Proceedings of IFACWorld Congress,1993:15-18.
16 刘刚,靳立强,陈鹏飞.复杂工况下基于最佳滑移率的汽车牵引力控制算法[J].吉林大学学报:工学版,2016,46(5): 1391-1398.LIU Gang,JIN Liqiang,CHEN Pengfei.The traction control algorithm based on the optimal slip ratio under complex conditions[J].Journal of Jilin University:Engineering Science,2016,46(5):1391-1398.(in Chinese)
17 胡建军,王银,秦大同,等.基于轴间转矩分配的四轮驱动汽车牵引力控制[J].华南理工大学学报:自然科学版,2010,38(1):108-112.HU Jianjun,WANG Yin,QIN Datong,et al.Wheel drive vehicle traction control based on the four wheel drive[J].Journal of South China University of Technology:Natural Science Edition,2010,38(1):108-112.(in Chinese)
Torque Distribution Control Strategy of Electronically Controlled Four-wheel Drive Axle Based on Genetic Algorithm
CHEN Liqing1TAN Yudian1WU Rong1MIAOWei1HU Fang2
(1.College of Engineering,Anhui Agricultural University,Hefei230036,China 2.School of Mechanical and Automobile Engineering,Hefei University of Technology,Hefei230009,China)
In order to improve the four-wheel drive vehicle dynamic performance and running stability,
an axis torque distribution control strategy was proposed through real-time observation of front and rear shaft speed difference and wheel slip ratio of the car.The vehicle dynamics model was constructed through the Matlab/Simulink,including transmission system model,tiremodel and sub-modules like slip ratio calculation module and motor model.The inter axle torque distribution control system and application was designed based on genetic algorithm(GA)and the PID control.On the low adhesion uniform pavement,docking road face to speed up performance of vehicle was simulated and analyzed.The hardware and software design of the shaft torque control system was carried out,and the development of the shaft torque control system was done,and the developmentof the controllerwas verified by the road test.The hardware and software design included the controller circuit and power circuit,and the control system of PCB harware increased the anti-interence design.Taking CodeWarrior as platform,the control system software framework,CAN bus communication program,data acquisition program,PWM driver were designed.The result showed that the controller and the control strategy can follow the real-time road conditionswell,so that the vehicle dynamic performance and stability were improved.The test resultalso verified the effectiveness of the control system.
electric four-wheel drive vehicle;axle torque distribution;genetic algorithm;software and hardware design;control strategy
U461.2;U469.72
A
1000-1298(2017)07-0361-07
2016-11-14
2017-01-04
国家自然科学基金项目(51305004)
陈黎卿(1979—),男,教授,博士,主要从事四驱汽车传动系统设计研究,E-mail:lqchen@ahau.edu.cn
胡芳(1969—),女,副研究员,博士,主要从事四驱汽车传动系统设计研究,E-mail:hufangbig@126.com
10.6041/j.issn.1000-1298.2017.07.046
