烟草夹持式智能打顶机设计与试验
2017-07-31范国强杨庆璐张晓辉王金星葛云勇
范国强 杨庆璐 张晓辉 王金星 陈 瑞 葛云勇
(1.山东农业大学机械与电子工程学院,泰安271018;2.山东省园艺机械与装备重点实验室,泰安271018; 3.山东裕隆矿业集团有限公司唐阳煤矿,汶上272508;4.雷沃重工股份有限公司,潍坊261206)
烟草夹持式智能打顶机设计与试验
范国强1,2杨庆璐1,2张晓辉1,2王金星1,2陈 瑞3葛云勇4
(1.山东农业大学机械与电子工程学院,泰安271018;2.山东省园艺机械与装备重点实验室,泰安271018; 3.山东裕隆矿业集团有限公司唐阳煤矿,汶上272508;4.雷沃重工股份有限公司,潍坊261206)
针对烟草现有打顶抑牙机难以实现烟花收集的问题,设计了一种夹持式智能打顶机,主要由高地隙作业底盘、夹持式智能打顶装置与收集装置组成。夹持式智能打顶与收集装置主要由烟草高度图像识别控制系统、升降机构、夹持输送机构、切割机构、刀片消毒系统、抑牙剂喷施系统和收集系统组成,可实现烟草高度识别、打顶高度调整、烟花收拢、夹持切割、刀片消毒、抑牙剂喷施与烟花收集等联合作业,具有结构紧凑、功能齐全和智能化程度高的优点。在打顶升降机构中采用配重来平衡打顶机构的质量,降低了起升电动机的驱动力矩,能够节约64%的能源。试验结果显示,该机打顶准确率为95%,收集率达到98%,能够满足使用要求。
烟草;打顶机;抑芽;图像处理
引言
烟草打顶抑芽在我国基本由人工完成,作业效率低,劳动强度大,而近年来开始推进的现代烟草农业建设为烟叶生产机械化创造了有利条件[1-2]。欧美国家烟草打顶已经实现了机械化作业,普遍采用机电液一体化技术,实用性强,效率高,典型的机型为意大利Spapperi公司的JS-120型打顶机。国外机型均采用手动调整打顶高度的方法,作业前根据烟草实际高度将打顶装置调整到相应高度然后作业,但不能精准识别每株烟草的高度,容易造成漏打或打顶过度[3-8],国内仿制的机型存在同样的缺点[9]。
国内研制的3YDX-3智能型烟草打顶抑芽机[10],实现了烟草高度的识别、打顶和对靶施药,但未实现烟花自动收集,容易造成烟草交叉感染和烟田污染。而技术成熟的玉米去雄机无需收集雄穗[11-13],无法直接应用在烟田。
针对我国国情,需要研制一种烟草精准打顶、抑芽剂喷施、刀片消毒和烟花自动收集联合作业的作业机械,为此本文设计一种夹持式智能打顶机。
1 整机结构与工作原理
1.1 整机结构
烟草夹持式智能打顶机主要由高地隙作业底盘、夹持式智能打顶装置、收集装置与控制装置组成,整机结构如图1所示。

图1 烟草夹持式智能打顶机结构图Fig.1 Overall structure sketch of tobacco toppingmachine
高地隙作业底盘的内燃机为行走驱动系统提供动力,内燃机驱动发电机为蓄电池组供电,蓄电池组为打顶装置的电动机和检测系统供电。左侧与右侧摄像头对称布置,各采集一行烟草高度图像传到驾驶室内的工控机。左夹持打顶装置与右夹持打顶装置对称安装在安装架前部,可实现2行烟草的打顶。
烟草花期处于雨季,田间泥泞,底盘采用液力传动装置、四轮驱动技术和轮边减速器以提高驱动力和操作性能。打顶后烟草高度为1.1~1.5m,标准烟田种植行距为1.2 m,高地隙作业底盘具体性能参数如表1所示。

表1 高地隙底盘性能参数Tab.1 Performance parameters of chassis
1.2 工作原理
1.2.1 烟草高度检测控制系统
作物打顶机械的高度检测主要采用光电管传感器检测技术[10-11,13]和机器视觉检测技术[14-15],本样机采用前期机型的图像识别控制系统[15]。
工控机对烟草图像进行提取得到图像的R、G、B分量三维图,得出烟花区域、烟叶区域、背景板区域的R、G、B分量具体分布范围。采用以列为单位的单线自适应分割判断方法,利用R、G、B值关系可以检测到烟花区域。为了保证检测精度和处理速度以满足田间作业对实时性的要求,样机采用三线同时检测的方法。确定打顶高度后,工控机通过控制打顶升降机构实现在高度方向的精确调整。
1.2.2 夹持式打顶及收集原理
夹持式打顶及收集装置主要由夹持打顶机构、升降机构和收集系统组成,如图2所示。

图2 夹持式打顶及收集机构结构图Fig.2 Diagram of topping and collection mechanism
夹持式打顶机构安装在升降轨道上,升降轨道两侧安装的8个滚轮只能在固定节前端的两条导航上做上下移动。配重安装4个滚轮,只能沿着固定节后方的导轨做上下移动。链条两端分别连接升降轨道与配重,步进电动机带动主动链轮旋转,通过链条拉动升降轨道上下移动。采用配重来平衡打顶机构的质量,可提高作业精度和速度,节约能源。
夹持式打顶机构主要由对称布置的两套带传动系统和切割机构组成,如图3所示。

图3 夹持式打顶机构结构示意图Fig.3 Structure sketch of topping device with clamping belt
两侧直流夹持电动机转向相反,夹持带内侧由前向后移动,将收拢的烟花夹住并向后输送,切割电动机带动圆盘割刀将烟花切断。前摆动铰链和后摆动铰链可以调整两侧夹持带之间的间隙,以适应粗细不同的作物,张紧弹簧使两侧夹持带之间保持夹持力。
夹持式打顶机构的后部下方装有一条胶带输送机,切断后的烟花由夹持带输送到胶带输送机上部掉落,汇集输送到收集筐内,克服了前期机型无法收集烟花的缺点。
1.2.3 抑牙剂喷施与切割刀消毒原理
抑芽剂喷施与切割刀消毒系统如图4所示,主要由抑芽剂药泵、消毒药泵、抑芽剂喷头、消毒喷头和红外线发射、接收管组成。
在圆盘割刀的下方安装一对红外线发射管和红外线接收管,工作中当切割后的烟杆从红外线发射、接收管传感器中间穿过时,发射管发出的红外光线被烟杆遮挡,接收管就接收不到红外光,接收管截止。接收管向工控机发出高电平信号,工控机启动抑牙剂药泵吸取消毒液,通过切割刀后侧上方的喷头喷施抑芽剂。
消毒药泵吸取消毒液经切割刀消毒喷头对圆盘割刀进行间隔喷射,防止不同植株之间病菌的传播。

图4 抑牙剂喷施与刀片消毒系统示意图Fig.4 Schematic diagram of restrain-germinating spraying and blade disinfection system
2 主要零部件设计
2.1 夹持打顶装置的设计
2.1.1 夹持输送机构
2.1.1.1 起轧角
实现轧入的条件是烟杆与夹持带之间的摩擦角Φ大于初始起轧角ψ,在摩擦特性试验台上测定烟花茎部与胶带的摩擦角Φ为39°。夹持带采用图5所示的V型开口布置方式,容易将烟花收拢集中到起轧部位,还降低了初始起轧角。在本机构中,初始起轧角ψ为前侧带夹角β的1/2(27°),满足了起轧要求。

图5 夹持输送机构工作示意图Fig.5 Schematic diagram of belt clamping device
2.1.1.2 夹持力
切割后烟花正常输送需保持一定的夹持力,以防止烟花在垂直方向滑落和在水平方向倾斜,烟花受力分析如图6所示。
力与力矩平衡方程组为

式中 Gy——烟花重力,为3 N
Fw——风阻力,为2 N

图6 烟花受力分析图Fig.6 Analysis diagrams of stress of tobacco flower
Ff1h——上层胶带摩擦力水平分力
Ff1v——上层胶带摩擦力垂直分力
Ff2h——下层胶带摩擦力水平分力
Ff2v——下层胶带摩擦力垂直分力
L1——风阻力与上层胶带夹持中心距离,为0.2m
L2——下层胶带夹持中心与上层胶带夹持中心距离,为0.02m
求解得Ff1为22.1 N,Ff2为20.1 N,胶带对烟茎的夹持力N为28 N。
图7a为夹持带与带轮受力图,当烟花处于前后张紧带轮中间时容易滑落,以此作为计算条件。
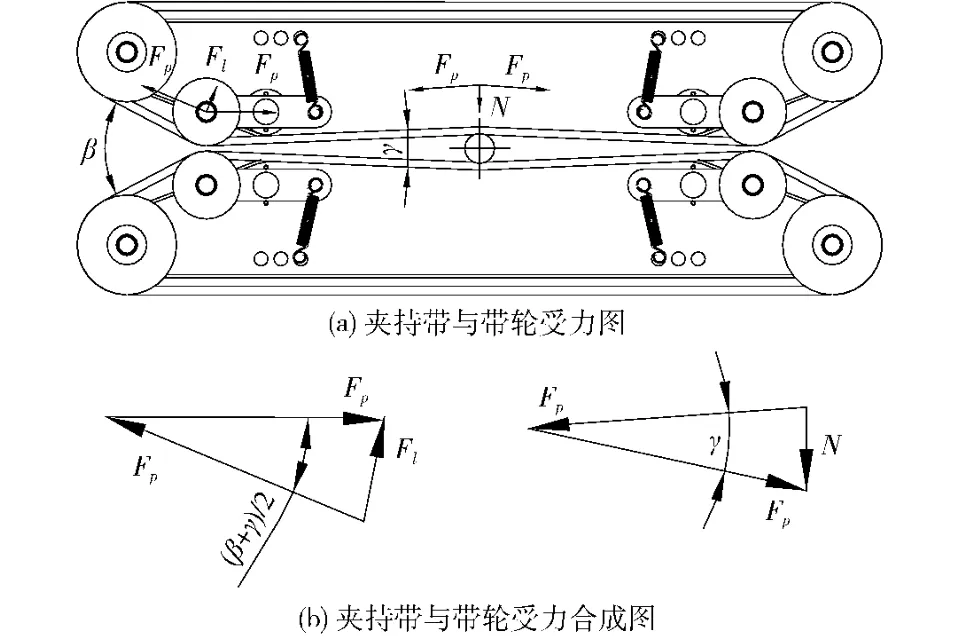
图7 夹持机构受力分析图Fig.7 Analysis diagrams of clamping device
图7b为夹持带与带轮受力合成图,夹持带与带轮受力方程为

式中 Fp——夹持带最小拉力,N
Fl——张紧轮受力
γ——夹持带拉力夹角
求得夹持带最小拉力Fp为318 N,张紧轮受力Fl为165 N,摆动铰链弹簧与张紧轮力臂比为4∶5,求得弹簧最小张紧力为132 N。选取60Si2Mn材质弹簧,根据受力变形条件得弹簧具体参数为:簧丝直径2.5mm,中径18 mm,有效圈数7圈。为了便于调节夹紧力,张紧弹簧一端的安装位置可以进行调整。
2.1.1.3 夹持带速度
夹持带由电动机带动,传送速度应与机组前进速度相匹配,夹持运动示意如图8所示。

图8 夹持运动示意图Fig.8 Schematic diagram of clampingmovement
由几何关系可得

式中 vm——机组前进速度,m/s
vp——夹持带传送速度,m/s
vs——夹持带绝对速度,m/s
δ——vs与竖直方向夹角,(°)
ε——夹持带倾角,(°)
夹持带倾角会影响夹持烟杆的输送速度,如果倾角选择过大,夹持带输送速度的有用分量会变小,而向上拔取的分量会增大,不利于夹持和输送。综合考虑整机的结构布置,取vp=(1.46~2.24)vm。在本设计中,取ε为30°,vp=1.73vm。主动带轮直径为100mm,求得转速为140 r/min。考虑带传动的弹性滑动,最终选取144 r/min的直流减速电动机,控制电压为24 V。
2.1.2 切割机构
由于烟秆质硬,打顶机采用80齿的锯齿状单圆盘刀对烟秆进行高速无支承回转切割,直径为255mm。圆盘刀转速直接影响切割质量,根据切割空白区最小原则,圆盘刀切割进程应近似等于刀刃的有效工作高度h,若保证圆盘刀刀刃全长参与切割,应满足[16]

式中 vy——圆盘刀片的圆周速度,m/s
R——圆盘刀半径,m
计算得圆盘刀片圆周速度vy≥1.04 m/s,转速n2≥79.5 r/min。提高切割速度可以降低切削力,同时为了简化传动机构,采用额定电压24 V,额定转速2 600 r/min的直流电动机直接驱动圆盘刀。
2.1.3 升降机构
取配重质量与链条前端连接的部件质量相同,均为36 kg。选取08A的滚子链,主动与被动链轮均为17齿,链条的拉力为

式中 f2——摩擦因数,为0.22
m2——夹持打顶装置与升降机构质量计算得链条拉力FL为155 N。若不采取配重平衡驱动力,链条拉力为430 N,因此采用配重的升降机构可节约64%的能源。
链轮分度圆半径为30.5 mm,得步进电动机输出扭矩为4.7N·m。为克服系统启动时静摩擦力,提高电动机启动时速度,最终选择额定转矩为12N·m的86BYG250H型步进电动机,驱动器为MA860H,步距角1.8°,控制电压为48 V。
烟草标准种植株距为50 cm,打顶作业速度为1.5 km/h,计算得相邻两株烟草作业时间间隔T为1.2 s。现花时植株最大高度差Hmax为40 cm,则升降机构运行速度最小值vc,min为

此时需要的步进电动机转速n1为

查步进电动机的转速扭矩图,当转速超过200 r/min时,步进电动机的输出扭矩快速下降,该步进电动机的最大转速选择合理。
步进电动机细分数m为20,转动1圈需要200个脉冲,则最大转速下所需脉冲频率为

式中 θ——电动机固有步距角,(°)
计算步进电动机所需脉冲频率为7 134 Hz。为了提高电动机启动、停止和换向时的平稳性,在控制中采用变频率加速或减速控制,具体措施为:在电动机调整运行总时间的前5%采取升频加速至稳定运行状态,在总时间的后5%阶段采取降频减速至静止状态,稳定运行状态脉冲频率采用8 000 Hz。
2.2 抑牙剂喷施与切割刀消毒系统
将18%的抑牙丹水剂用水稀释30倍后喷施在打顶后烟杆的断面与叶面,抑牙剂喷施系统采用1/8CC-PVC6508扇形喷头和最大流量为200 L/h的直流微型泵,每株烟施药10~12 mL,符合作业要求。
切割刀消毒采用相同的直流微型泵和扇形喷头,压力0.3 MPa时流量为3.2 L/min,喷射角为65°。喷射方式为每间隔1 s喷射0.5 s,防止不同植株之间病菌的传播。
3 试验与结果分析
3.1 试验条件与方法
为了验证样机的性能和可靠性,2016年7月在潍坊市诸城孟友烟农专业合作社的烟田试验基地进行了打顶试验。烟草生长处于初花期,适合打顶作业。试验条件:烟草高度为1 400~1 750 mm;烟花高度为120~260mm;烟草行距为1 200mm;烟草株距为500mm;作业速度为1.4~1.6 km/h。样机田间作业情况如图9所示。

3.2 试验结果与分析
试验过程中采集样本800株,主要作业性能指标如表2所示。

表2 性能试验结果Tab.2 Experimental results of performance
试验表明样机运转稳定,能够可靠地完成烟草高度图像识别、打顶高度调整、夹持打顶、烟花收集、圆盘刀片消毒与抑牙剂喷施等动作,满足使用要求。烟花收集率大于98%,作业效率为0.36 hm2/h,生产率为人工的3~5倍,达到了设计目标。
打顶后烟秆断面与烟花如图10所示,切割断面比较平整,效果良好。
4 结论
(1)设计了一种夹持式智能打顶机,主要由夹持式智能打顶装置、收集装置与高地隙作业底盘组成。该机能够同时完成2行烟草精准打顶、抑芽剂喷施、刀片消毒和烟花收集联合作业,具有作业精准且高效的优点,降低了劳动强度,克服了早期机型无法收集烟花的缺点,烟花收集率大于98%。

图10 作业效果图Fig.10 Topping effect pictures
(2)设计的烟草夹持式智能打顶装置主要由高度图像识别控制系统、升降机构、夹持机构、切割机构、刀片消毒和抑牙剂喷施系统组成。整套装置具有结构紧凑、功能齐全和智能化程度高的优点,可实现烟草高度识别、打顶高度调整、烟花收拢、夹持切割、刀片消毒和抑牙剂喷施的联合作业,作业效果良好。
(3)采用链条拉动的平衡配重式可升降打顶机构,具有驱动力矩小、动作迅速可靠的优点,提高了作业精度和速度,节约了64%的能源。
1 施卫省,唐辉,王亚明,等.控释肥料性质及其对烟草生长影响的研究[J].农业工程学报,2005,21(1):6-8.SHIWeisheng,TANG Hui,WANG Yaming,et al.Property of controlled release fertilizer and its effect on the growth of tobacco[J].Transactions of the CSAE,2005,21(1):6-8.(in Chinese)
2 毕红霞,许家来,薛兴利,等.山东烟区烟草农机专业合作社现状分析[J].中国烟草学报,2012,18(1):80-84.BIHongxia,XU Jialai,XUE Xingli,et al.A survey on professional tobacco agricultural machinery cooperatives in Shandong Province[J].Chinese Journal of Tobacco,2012,18(1):80-84.(in Chinese)
3 RAYMOND C L,HEINZ S,WAYNE E R.Apparatus and method for simultaneously topping and applying a precision application of sucker control chemicals to tobacco and other row crops:US,5987862[P].1999-12-23.
4 JOHN Balthes,GARRY Balthes,WILLIAM Palmer.Tobacco topping apparatus:US,4047366[P].1977-09-13.
5 WALTER Cecil Hammond,TIFTON Ga.Apparatus for topping stalk-type plants:US,3695013[P].1972-10-03.
6 ELWOOD Lee Smith.Devices for topping tobacco plants:US,3662526[P].1972-05-16.
7 WORSHAM Arch Douglas,BURCH Thomas B.Method and apparatus for simultaneously topping tobacco and controlling suckers with chemicals applied to cut stems bymechanicalmeans:US,6446420[P].2002-09-10.
8 WISE DAVID F,TYNDALL R B,JONESDonald E.Tobacco topping apparatus:US,3701240[P].1972-10-31.
9 马敏.基于ATmega128的烟草智能打顶机控制系统设计[D].泰安:山东农业大学,2011.
10 耿爱军,张晓辉,苗乃树,等.3YDX-3型烟草打顶抑芽机设计[J].农业工程学报,2010,26(7):96-101.GENG Aijun,ZHANG Xiaohui,MIAO Naishu,et al.Development of 3YDX-3 topping and restrain-germinating machine of tobacco[J].Transactions of the CSAE,2010,26(7):96-101.(in Chinese)
11 薛涛,谢斌,毛恩荣,等.玉米去雄机去雄作业控制系统设计与试验[J].农业工程学报,2015,31(4):49-54.XUE Tao,XIE Bin,MAO Enrong,et al.Design and experimentof emasculation control system of corn detasselingmachine[J].Transactions of the CSAE,2015,31(4):49-54.(in Chinese)
12 王锦江,陈志,董祥,等.制种玉米去雄机轮式抽雄部件设计与试验[J/OL].农业机械学报,2016,47(3):75-81.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20160311&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2016.03.011.WANG Jinjiang,CHEN Zhi,DONG Xiang,et al.Design and experiment for roller type tassel-removal component in seed corn detasselingmachine[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2016,47(3):75-81.(in Chinese)
13 王锦江,陈志,杨学军,等.3QXZ-6型制种玉米去雄机设计与试验[J/OL].农业机械学报,2016,47(7):112-118.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20160716&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2016.07.016.WANG Jinjiang,CHEN Zhi,YANG Xuejun,et al.Design and experiment of 3QXZ-6 seed corn detasseling machine[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2016,47(7):112-118.(in Chinese)
14 唐文冰,张彦娥,张东兴,等.基于双目立体视觉的玉米雄穗识别与定位研究[C]∥中国农业工程学会2011年学术年会论文集,2011.
15 刘双喜,李伟,王金星,等.双行智能烟草打顶抑芽机检测控制系统设计与试验[J/OL].农业机械学报,2016,47(6):47-52.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20160607&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2016.06.007.LIU Shuangxi,LIWei,WANG Jinxing,et al.Design and test of testing control system for double rows intelligent tobacco topping machine[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2016,47(6):47-52.(in Chinese)
16 金鑫,杜新武,王世光,等.胡萝卜收获机根茎分离装置设计与试验[J/OL].农业机械学报,2016,47(3):82-89.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20160312&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2016.03.012.JIN Xin,DU Xinwu,WANG Shiguang,et al.Design and experiment of stems cutting device for carrot harvester[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2016,47(3):82-89.(in Chinese)
Design and Test of Intelligent Tobacco Topping Machine w ith Clam ping Belt
FAN Guoqiang1,2YANG Qinglu1,2ZHANG Xiaohui1,2WANG Jinxing1,2CHEN Rui3GE Yunyong4
(1.College of Mechanical and Electrical Engineering,Shandong Agricultural University,Taian 271018,China 2.Shandong Provincial Key Laboratory of Horticultural Machineries and Equipments,Taian 271018,China 3.Tangyang Cool Mine,Shandong Yulong Mining Group,Wenshang 272508,China 4.Lovol Heavy Industry Co.,Ltd.,Weifang 261206,China)
In order to collect tobacco flowers cut off,an intelligent tobacco topping machine with clamping beltwas designed.It wasmainly composed of a high ground clearance chassis,an intelligent topping device with clamping belt and a collecting device.The high ground clearance chassis used fourwheel drive and steering technology,and it had advantages of good through performance and high stability.The intelligent topping device was made up of an image recognition and control system of tobacco height,a lifting mechanism,a belt clamping mechanism,a cutting mechanism,a blade disinfection system and a restrain-germinating spraying system.Tobacco height recognition,topping height adjustment,tobacco flower gathering,clamping and cutting,blade disinfection,restraingerminating spraying and other joint operations can be achieved by this intelligent topping device.This device had advantages of compact structure,full function and high intelligence.Belt conveyor was installed below the bottom of topping device,and tobacco flowers cut offwas transported to the collection basket.In order to reduce the drive torque of electric liftingmotor,a counterweightwas used to balance the topping mechanism,and 64%energy can be saved.Experimental results indicated that topping accuracy rate was about95%,collecting accuracy rate was about 98%,and it can meet the production requirements.
tobacco;toppingmachine;restrain-germinating;image processing
S224.4
A
1000-1298(2017)07-0121-06
2016-11-23
2017-01-21
山东省现代农业产业技术体系棉花产业创新团队项目(SDAIT-03-09)、中国烟草总公司山东省公司科技重大专项和重点项目(KN216)、山东省重点研发项目(2016GNC112005)和山东省“双一流”奖补资金项目(SYL2017XTTD14)
范国强(1975—),男,副教授,博士,主要从事液压传动与农业装备研究,E-mail:fgq1217@163.com
张晓辉(1961—),男,教授,博士生导师,主要从事农业机械设计及理论研究,E-mail:Zhangxh@sdau.edu.cn
10.6041/j.issn.1000-1298.2017.07.015
