南极磷虾拖网加工船双桁架系统设计
2017-07-25周春凯王威
周春凯,王威
中国舰船研究设计中心,湖北武汉430064
南极磷虾拖网加工船双桁架系统设计
周春凯,王威
中国舰船研究设计中心,湖北武汉430064
[目的]为了提高南极磷虾拖网加工船的捕捞效率,避免拖网内磷虾长时间相互挤压以保护其虾体品质,[方法]提出一种相较于常规南极磷虾尾拖网捕捞效率更高的新型双支架桁杆拖网设计方案。通过系统结构建模方法,对双桁架系统在吊放和作业状态下的受力与结构进行仿真分析,得到拖网绞车与桁杆的距离,以及水平定位钢缆与桁杆距离的限制范围,从而避免双桁架结构的构件发生受力突变,确保拖网钢缆和水平定位钢缆在捕捞作业时的有效性。[结果]仿真结果显示,采用该双桁架系统能够在提高南极磷虾捕捞加工效率的同时确保系统结构的安全性。[结论]该双桁架系统可作为未来我国南极磷虾拖网加工船桁架设计的优选方案。
南极磷虾拖网加工船;双桁架设计;受力分析;拖网
0 引 言
南极水域蕴藏了丰富的海洋生物资源,已知鱼类有200多种,磷虾类有8种,年捕获量相当于全世界海产品捕获量的2倍,因此,开发利用潜力巨大。南极磷虾主要用于食品、制药、美容、养殖业等领域。上世纪70年代,许多国家就开始了南极磷虾捕捞活动,挪威近年来对南极磷虾进行深加工,已形成了产业化[1-2]。我国由于在渔机渔仪、渔具渔法、综合集成等方面的技术相对落后,加之国外技术封锁,尚不具备南极磷虾的商业性捕捞能力[3]。随着我国近海海洋渔业资源的日渐枯竭,南极磷虾作为重要的战略资源,对其进行海上综合开发利用技术的自主研究具有重要意义。
我国自主设计的南极磷虾拖网加工船的作业区位于南极罗斯等海域,主要捕捞对象为南极磷虾。由于磷虾在拖网内长时间挤压会造成虾壳中高含量元素氟渗入虾体可食部分,进而造成磷虾体内的酶迅速分解,引起肉质腐败,因此必须在起捕后的1~3 h内进行加工处理[4],可见南极磷虾拖网捕捞面临的重要技术问题是如何提高捕捞的效率和确保虾体品质,这也是南极磷虾捕捞技术研究的重点。目前,各国南极磷虾捕捞作业仍以传统的拖网捕捞为主,无法避免上述捕捞过程带来的缺点。挪威等少数渔业强国已成熟运用了新型双桁架拖网技术,该技术可以有效避免南极磷虾在拖网内长时间相互挤压,从而保护其品质[5]。
本文将通过结构建模方法,对双桁架系统在吊放和拖网作业状态下的结构受力情况进行仿真计算研究,得到可以确保南极磷虾捕捞过程安全有效的相关结构设计参数,提出双桁架拖网设计方案。采用该设计方案,将可以极大地提高我国南极磷虾捕捞、加工的综合效率。
1 双桁架渔法概述
南极磷虾拖网加工船双桁架系统结构如图1所示。双桁架拖网捕捞示意图如图2所示。双桁架结构型式是在船舶左右舷对称布置,主要由桁杆、船体门式钢架结构、网具、滑轮、拖网钢缆、水平定位钢缆、垂直定位钢缆等组成。双桁架拖网渔法是指在船舶舯部的两舷各撑出1根桁杆,桁杆外端设置1个滑轮,与网具相连的钢缆通过滑轮与拖网绞车相连,同时桁杆通过水平、垂直定位钢缆进行支撑。在拖网过程中,通过网具末端泵吸软管连接的吸鱼泵,将网中的磷虾直接吸到甲板上,从而达到捕捞磷虾的目的。
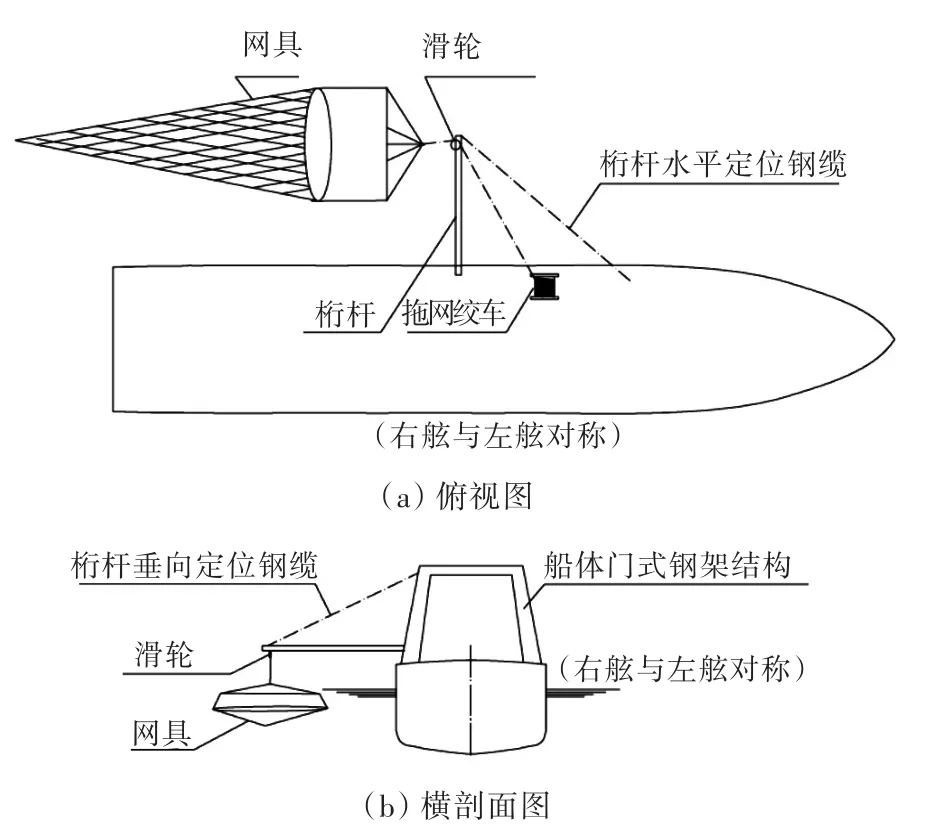
图1 双桁架系统构成图Fig.1 Structure of twin-truss trawl system

图2 双桁架拖网捕捞示意图Fig.2 Sketch map of twin-truss trawl fishing
2 系统设计目标和设计输入
2.1 设计目标
通过对桁架、水平和垂直定位钢缆在吊放、平稳状态、风浪扰动3种工况下的受力进行分析和计算[6-11],采用改变绞车的位置等方法,设计以绞车最小受力为标准的双桁架系统,避免以下工况时的最大受力情况,即最危险工况。
1)桁架吊放状态。对桁架从垂直、贴着门式钢架结构的状态到水平放置过程中的垂直定位钢缆和桁架进行受力分析,以确定该钢缆的绞车以及门式钢架结构处的结构加强,计算出最大受力情况。
2)桁架平稳状态。桁架平稳拖网作业时,对桁架、水平和垂直定位钢缆以及拖网钢缆进行受力分析,计算出各钢缆的最大受力情况。该情况可以作为风浪扰动状态下的特例,即不用单独分析。
3)风浪扰动状态。在风浪扰动的状态下,船舶发生横摇,横摇角20°。在此工况下,对桁架、水平和垂直定位钢缆以及拖网钢缆进行受力分析,计算出最大受力情况[12-13]。
2.2 设计输入
设计输入说明如下:
1)船舶在航行状态和停泊状态时,桁杆竖向收起,靠附在船体门式钢架结构上。同时,桁杆在水平方向可以180°角转动,工作状态考虑桁杆水平偏移角β(范围±5°)。
2)拖网滑轮始终处于桁杆后方,且桁杆端部到滑轮圆心钢缆长度L0可调节,本文按照L0=2.5~8.5 m的取值范围计算。
3)门式钢架结构高20 m,桁杆长20 m,直径约20 cm。展开时,距水面高度约8.5 m,水深为100 m,拖网钢缆长约300 m,拖网钢缆与水平面的夹角α约为21.2°。
4)钢索直径为28mm或32mm。
5)船舶以3.5 kn航速拖网航行时,吊放状态下渔网作用于桁杆的竖向力(即网具阻力)Fw=490 kN,网口垂直高度约19 m。
6)考虑在风浪扰动状态下船舶的横摇角为20°,根据中国船级社《船舶与海上设施起重设备规范(2007)》的规定,双桁架系统按照吊杆装置特殊作业工况进行设计,同时满足《钢制海船入级规范(2012)》相关要求。
7)图3所示为南极磷虾拖网加工船桁杆与船体的连接型式,矩形框为双桁架结构布置区域。为保证拖网钢缆、水平定位钢缆在作业时不会发生纠缠及破坏双桁架结构,拖网绞车与桁杆的距离Lw必须小于水平定位钢缆与桁杆的距离Ls,两者必须处于布置区域内,即Lw<Ls≤29m。
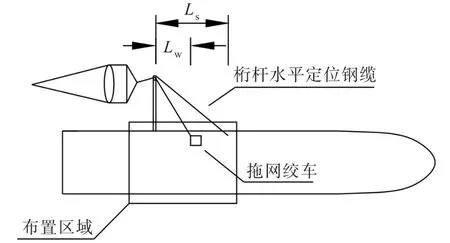
图3 南极磷虾捕捞加工船桁杆与船体的连接型式Fig.3 Connection of twin-truss and hull of the antarctic krill trawl processing ship
3 系统建模和结构设计
3.1 双桁架吊放状态
双桁架吊放状态如图4所示。图中,Fg为桁杆轴向压力,kN;Fc为垂直定位钢缆拉力,kN;Gh为桁杆自重,kN;L为桁杆长度,m;H为门式钢架结构高度,m;γ为桁杆吊放过程与水面的夹角,(°);δ为垂直定位钢缆与水平面的夹角,(°)。
桁架从垂直、贴着门式钢架结构的状态到水平放置过程中,桁杆端部受Fw,Fg,Fc这3种作用力的影响,且在平面内受力平衡。
由受力平衡可得下列方程组:
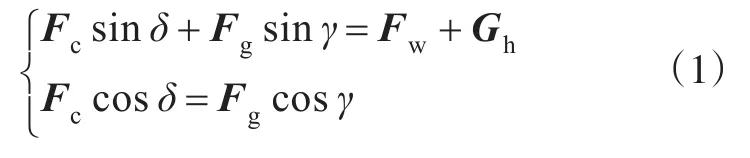

图4 吊放状态示意图Fig.4 Sketch map of tethered state of twin-truss trawl system
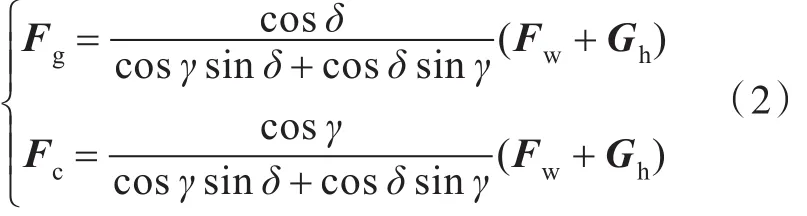
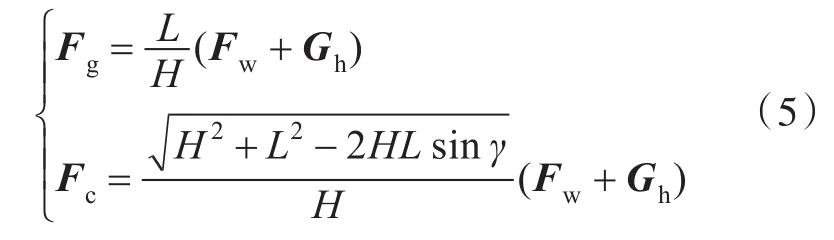
计算可得Fg,Fc的表达式如下:
由图4的几何关系可知:

进而得到如下计算公式:
3.2 双桁架作业状态
双桁架作业状态模型建立在拖网绞车D、水平钢缆安放点F、桁杆安放点E这3点处于同一水平面且3点共线的前提下,其作业状态如图5所示。
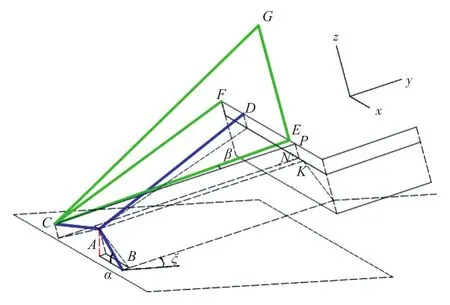
图5 双桁架作业状态示意图Fig.5 Sketch map of operating state of twin-truss trawl system
图中:A为滑轮圆心;CE表示桁杆长度L,其中,E点为G点的垂足;CA表示L0;DE表示Lw(以下称临界距离);EF表示Ls;NK表示滑轮距P点沿x轴方向的距离Lax,其中,N点为P点的垂足,K点为A点的垂足;AK表示滑轮至船身的距离Lay;PN表示滑轮至甲板平面的垂直距离Haz,其中,P点为C点在甲板平面上的垂足;ξ为平稳作业状态时船身与水平面的夹角(即横摇角,范围±20°)。
对双桁架作业状态下的结构受力分析如下:
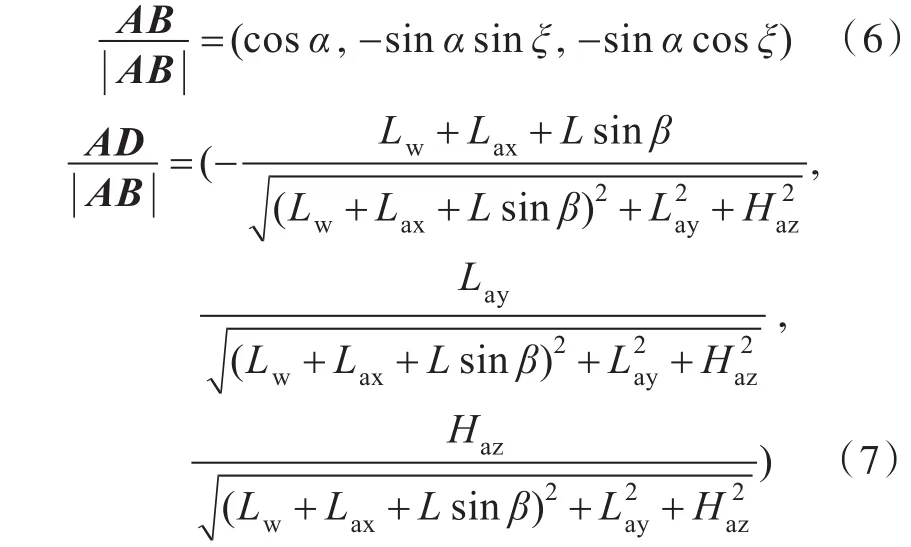
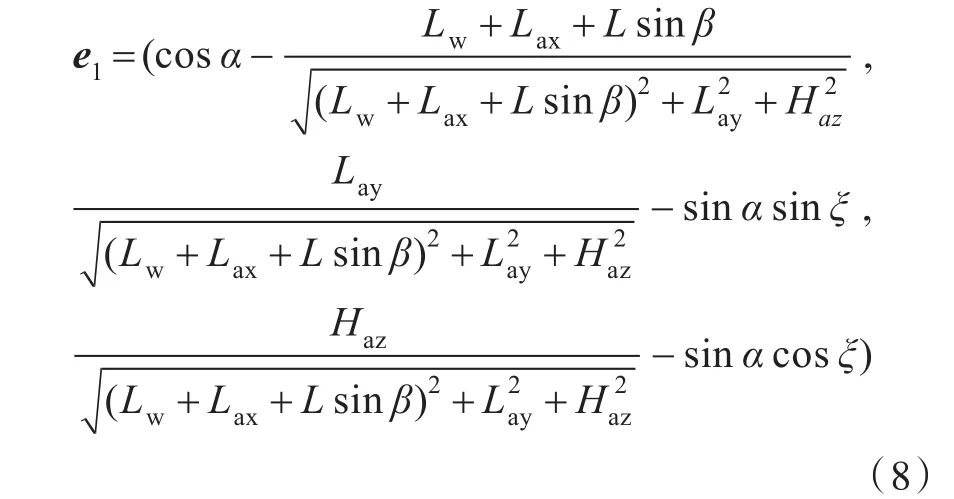
作业状态中,桁杆在空间内受力平衡,与Fc和Fg、水平定位钢缆拉力Fs、连接桁杆端部到滑轮圆心钢缆拉力Fh以及Gh有关系。将拖网钢缆AB、拖网绞车至滑轮圆心的距离AD向量进行单位化:
由于CA为AB,AD的角平分线,故Fh所在的单位向量为
Fg,Fc,Fs对应的向量 CE,CG,CF分别表示如下:
将上述向量分别进行单位化处理如下:

则CA,CG,CF钢缆所受力的向量分别为:
式中,fw,fc,fs分别为对应力的标量。
桁杆轴向压力的向量为

式中,fg为对应力的标量。
桁杆自重向量为

根据上述公式,可以得到桁杆空间受力平衡方程如下:
通过式(20)~式(22),可分别得到Fc,Fg,Fs,Fh的值。
4 系统数据分析
4.1 双桁架吊放状态
根据对双桁架吊放状态受力分析系统的数据,得到分析结果如下:
1)桁杆所受轴向压力Fg的值仅与门式钢架结构高度H、桁杆长度L、桁杆重力Gh及Fw有关,与γ无关,Fg的值在吊放状态保持不变。
2)当门式钢架结构高度H、桁杆长度L、桁杆重力Gh及Fw确定后,Fc在吊放过程中随γ的增大而减小,即起吊过程中γ=0°时,垂直定位钢缆产生的拉力最大。
4.2 双桁架作业状态
根据双桁架作业状态受力分析系统的数据,得到分析结果如下:
当平稳作业状态横摇角ξ=0°,即平稳工作状态为风浪状态的特例时,可将平稳作业状态归入风浪状态。实际情况下,Haz<8.5 m,Lay<20 m,且均为正值。计算结果表明,Lw无论取何值,该条件均满足。
4.2.1 拖网绞车安放距离Lw分析
1)拖网滑轮必须处于桁杆后方,否则滑轮组将偏离船身过远,从而影响南极磷虾拖网加工船的正常作业。
根据实际操作经验,南极磷虾拖网加工船正常工作状态时,L0≈2.5 m。图6所示为在不同横摇角ξ情况下Lax随Lw变化的曲线。由图可知,Lw越大,则Lax越小。当Lax=0时,Lw最大,此时即为拖网绞车安放的临界距离。表1所示为L0=2.5 m、船身处于3种横摇角ξ、桁杆处于3种水平偏移角β时拖网绞车安放的临界距离Lw。
由表1可知,为了保证ξ,β在所有取值下拖网滑轮均处于桁杆后方,Lw应取最小值。当ξ=-20°,β=5°时,Lw=44 m,此时是所有工况下较危险的情况,故为保证安全,必须要求Lw<44 m。


图6 不同ξ取值下Lax随Lw变化的曲线Fig.6 Variation ofLaxwith respecttoLwunder variousξvalues
表1 不同工况时Lw的取值范围Table 1 Range ofLwunder various conditions
南极磷虾拖网加工船作业时,L0需要人工调整。当L0=2.5 m时,较危险的状态应为ξ=-20°,β=5°。当L0为不同值时,Lax随Lw变化的曲线如图7所示。由图可知,随着L0的增大,Lw越小。其中,当L0=8.5 m时,Lw=35 m,而Lax=0是不同L0取值中的最小值,故Lw≤35 m才能保证不影响正常作业。
2)水平定位钢缆受力Fs与Ls,Lw有关。根据受力分析结果,水平定位钢缆是否失效(失效即为钢缆中拉力为0或为负)只取决于Lw。
由数据分析可知,当ξ=-20°,β=-5°时,Fs=0对应的Lw值最小。图8所示为L0在3种取值时Fs随Lw变化的曲线。由图可知,随着Lw增大,Fs减小。当L0=8.5 m,Lw=24 m时,Fs=0,此时,水平定位钢缆开始失效。因此为保证水平定位钢缆始终处于受拉状态,且不产生失效的危险情况,必须要求Lw≤24 m。
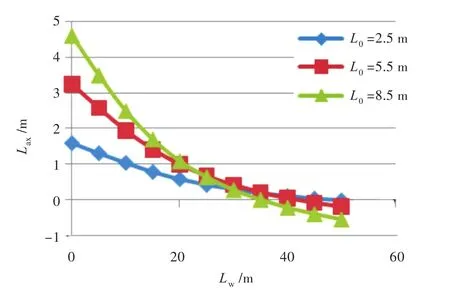
图7 不同L0取值下Lax随Lw变化曲线Fig.7 VariationofLaxwithrespecttoLwundervariousL0values
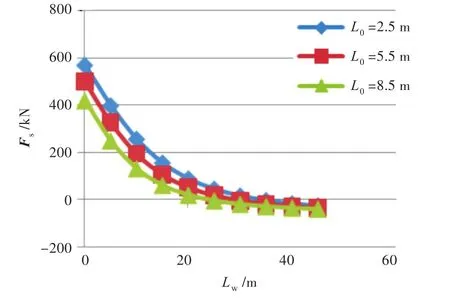
图8Fs随Lw的变化曲线(ξ=-20°,β=-5°)Fig.8 Variation ofFswith respect toLwwhenξ=-20°andβ=-5°
4.2.2 受力分析
在桁杆作业状态下,ξ=-20°~20°,β=-5°~5°,L0=2.5~8.5 m。由于布置区域的限制,Lw=0~29 m,Ls=0~29 m。下面分别对Fc,Fg,Fs,Fh进行分析。
1)垂直定位钢缆拉力Fc。
大量计算数据分析表明,Fc随ξ的增大而减小,随β的增大先增后减,随L0的增大而减小。因此,选取较危险的状态,即ξ=-20°,L0=2.5 m,可求得Fc的最大值。当较危险状态仍能满足设计需要时,其他较安全状态则可得到满足。由式(20)~式(22)求解的可知,此时Fc仅与Lw有关。图9所示为Fc随Lw变化的曲线。由图可知,Fc随Lw变化不大,其值保持在248~255 kN之间。

图9Fc随Lw的变化曲线Fig.9 Variaton ofFcwith respect toLw
2)桁杆轴向压力Fg。
大量计算数据分析表明,Fg随着ξ,β,L0的增大而减小。因此,分别选取较危险的状态,即ξ=-20°,β=-5°,L0=2.5 m。图10所示为较危险状态下Fg随Lw,Ls变化的三维关系曲面。由图可知,Fg随Lw,Ls的增大而减小,当Ls=0~11 m时,Fg增长较快;当Ls=11~15 m时,Fg增长缓慢;当Ls=15~29 m时,Fg变化很小,其值保持在300~800 kN之间。
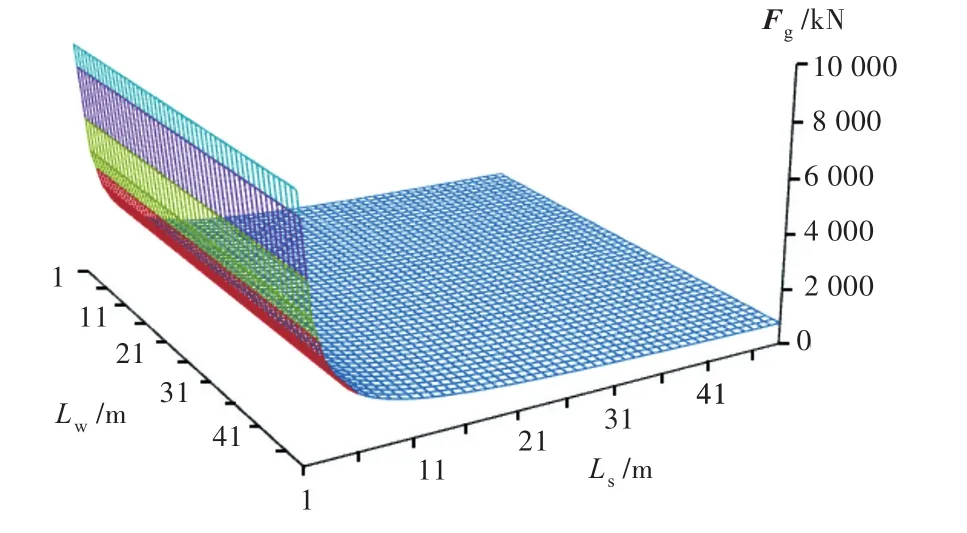
图10Fg随Lw和Ls变化的三维曲面Fig.10 VariationofFgwithrespecttoLwandLs
3)水平定位钢缆拉力Fs。
大量计算数据分析表明,Fs随ξ先增大后减小,随β,L0的增大而减小。因此,分别选取最危险的状态,即ξ=0°,β=5°,L0=2.5 m。图11所示为最危险状态时Fs随Lw,Ls变化的三维关系曲面。由图可知,Fs随Lw,Ls的增大而减小。当Ls=0~11 m时,Fs增长较快;Ls=11~50 m时,Fs变化很小,其值保持在100~200 kN之间。
4)桁杆端部到滑轮圆心钢缆拉力Fh。
Fh随ξ的增大而增大,随β,L0的增大而减小。当Lw=15~24 m,Ls=15~29 m时,Fh变化不大,其值保持在50~100 kN之间。由于值较小且变化不大,相应的曲线图略。
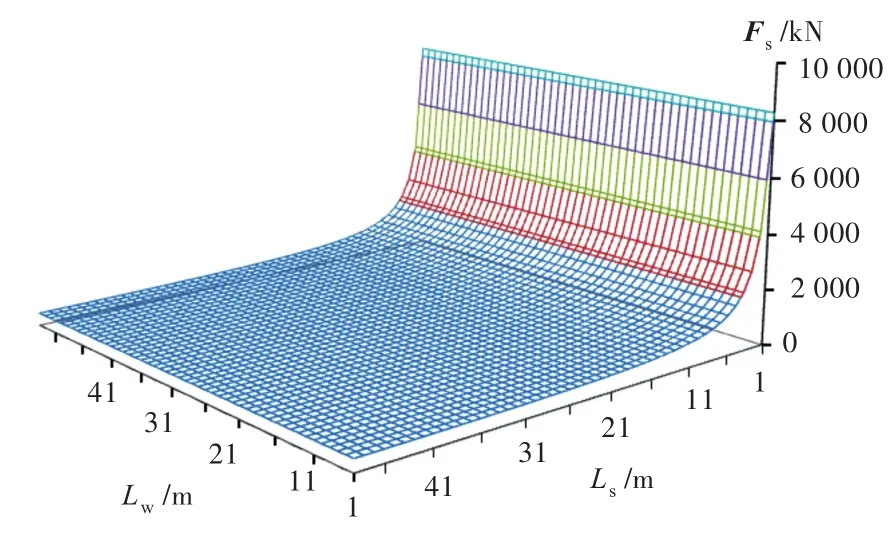
图11Fs随Lw和Ls变化的三维曲面Fig.11 Variation ofFswith respect toLwandLs
5 结论
本文采用一种新型的双桁架拖网渔法,解决了常规的南极磷虾尾拖网捕捞方式效率较低的问题,达到了提高南极磷虾捕捞效率的目的。通过系统结构建模方法,深入分析了双桁架系统在吊放和作业状态下的结构受力情况,得到如下结论:
1)风浪扰动状态下,ξ≯20°,Lw=15~24 m,Ls=15~29 m时,Fc,Fg,Fs,Fh平稳变化,此时,不会对双桁架结构的构件造成受力突变。
2)作业状态下,Lw=15~24 m,Ls=15~29 m时比较合适。对于ξ>20°,考虑到船舶的安全性和操纵性,此时不适合使用双桁架系统进行捕捞作业。
本文通过理论分析和仿真计算的方式确定了双桁架系统的设计参数,该系统尚未经过试验验证和实际作业工况的检验,需要在以后的设计中进一步改进和完善。
[1]刘勤,黄洪亮,李励年,等.南极磷虾商业化开发的战略性思考[J].极地研究,2015,27(1):31-37.LIU Q,HUANG H L,LI L N,et al.Strategic thinking behind the commercial development of Antarctic krill[J].Chinese Journal of polar Research,2015,27(1):31-37(in Chinese).
[2]苏学锋,冯迪娜.南极磷虾产业开发特点及发展趋势[J].食品研究与开发,2012,33(12):214-217.SU X F,FENG D N.Development characteristics and trends of Antarctic krill industry[J].Food Research and Development,2012,33(12):214-217(in Chi⁃nese).
[3]黄洪亮,陈雪忠,刘健,等.南极磷虾渔业近况与趋势分析[J].极地研究,2015,27(1):25-30.HUANG H L,CHEN X Z,LIU J,et al.Analysis of the status and trend of the Antarctic krill fishery[J].Chinese Journal of Polar Research,2015,27(1):25-30(in Chinese).
[4]俞所银,包建强,李越华,等.南极磷虾在不同冻藏温度下品质变化[J].食品与发酵工业,2014,40(1):232-237.YU S Y,BAO J Q,LI Y H,et al.Quality changes of Antarctic krill(Euphausia superba)stored at different frozen temperatures[J].Food and Fermentation Indus⁃tries,2014,40(1):232-237(in Chinese).
[5]LØKKEBORG S.Best practices to mitigate seabird by⁃catch in longline,trawl and gillnet fisheries—efficien⁃cy and practical applicability[J].Marine Ecology Prog⁃ress Series,2011,435:285-303.
[6]荣雷.双杆作业受力分析[J].天津航海,1997(3):6-8.
[7]刘振亮,佘显炜,宋伟华.浙江舟山虾拖网桁杆及叉纲的力学计算[J].浙江海洋学院学报(自然科学版),2010,29(2):108-113.LIU Z L,SHE X W,SONG W H.Calculate the ten⁃sions acting on the beam and cross ropes of the beam shrimp trawl in Zhoushan Zhejiang[J].Journal of Zhe⁃jiang Ocean University(Natural Science),2010,29(2):108-113(in Chinese).
[8]汪雅棋,温华兵,沈超明,等.600t起重船起吊系统强度校核及应力测试分析[J].起重运输机械,2010(10):19-23.WANG Y Q,WEN H B,SHEN C M,et al.Analysis on strength check and stress test for hoisting system of the 600t floating crane[J].Hoisting and Conveying Ma⁃chinery,2010(10):19-23(in Chinese).
[9]孙永煜.船用轻型和重型单吊杆的受力分析及安全操作[J].航海技术,2010(6):33-35.
[10]王威,汤国杰,龚少军.单吊杆的事故案例及千斤索的受力分析[J].航海技术,2013(4):32-33.
[11]黄秋芸.甲板起重机吊臂系列化设计及系统开发[D].镇江:江苏科技大学,2012.HUANG Q Y.Serialization design and system exploi⁃ration of deck crane boom[D].Zhenjiang:Jiangsu University of Science and Technology,2012(in Chi⁃nese).
[12]季春颖.内河船小型吊艇杆结构设计与强度分析[D].哈尔滨:哈尔滨工程大学,2012.JI C Y.Structure design and strength analysis of small inland davit pole[D].Harbin:Harbin Engineering University,2012(in Chinese).
[13]张纹梅,杨辉.1000t自航起重船设计[J].江苏船舶,2012,29(3):12-14.
Twin-truss system design for antarctic krill trawl processing ship
ZHOU Chungkai,WANG Wei
China Ship Development and Design Center,Wuhan 430064,China
Aiming to improve the fishing efficiency of antarctic krill processing ships by averting the potential crushing of krill in the trawl to meet quality requirements,a twin-truss system design is proposed which has higher efficiency compared with the traditional system installed in ships.To simulate this design,an analysis of forces acting on the twin-truss structure is conducted under tethered and operating conditions using the structure model method,and an appropriate distance between trawl winch and truss structure,as well as the range for limiting the distance of the horizontal locating cable and truss structure,are obtained.It can also prevent the truss structure from breaking down,enabling the efficiency of trawling and horizontal locating cables during fishing operations.The simulation shows that the new twin-truss system design can improve the efficiency of trawl processing ships,whilst maintain the safety of the truss structure.This design can provide an optimal solution for the truss systems of national antarctic krill processing ships.
antarctic krill trawl processing ship;twin-truss design;mechanical analysis;trawl
U674.45
:ADOI:10.3969/j.issn.1673-3185.2017.03.013

http://kns.cnki.net/kcms/detail/42.1755.TJ.20170512.1201.016.html期刊网址:www.ship-research.com
周春凯,王威.南极磷虾拖网加工船双桁架系统设计[J].中国舰船研究,2017,12(3):91-97.
ZHOU C K,WANG W.Twin-truss system design for antarctic krill trawl processing ship[J].Chinese Journal of Ship Research,2017,12(3):91-97.
2016-10-22< class="emphasis_bold">网络出版时间
时间:2017-5-12 12:01
国家高技术研究发展计划资助项目(2012AA092304)
周春凯(通信作者),男,1973年生,硕士,高级工程师。研究方向:舰船总体设计与信息化技术。E-mail:zhouoldk@126.com
王威,男,1975年生,博士,高级工程师。研究方向:舰船结构设计
