柴电混合电力推进船舶负载频率H∞鲁棒控制
2017-07-25李洪跃王锡淮肖健梅陈晨
李洪跃,王锡淮,肖健梅,陈晨
上海海事大学物流工程学院,上海201306
柴电混合电力推进船舶负载频率H∞鲁棒控制
李洪跃,王锡淮,肖健梅,陈晨
上海海事大学物流工程学院,上海201306
[目的]风、浪及海流等多种随机不确定因素会引起船舶综合电力系统负载频率的波动。[方法]采用电池补偿柴油发电机组输出功率与船舶需求功率之间的差值,对柴油发电机组进行二次调频控制,保证船舶电网功率平衡,抑制电网频率波动。建立综合电力推进系统频率控制状态空间模型,基于H∞混合灵敏度原理,选取合理的灵敏度与补灵敏加权函数设计鲁棒控制器,采用线性矩阵不等式(LMI)方法对设计的控制器进行求解并进行算例仿真。[结果]系统幅频特性表明,设计的鲁棒控制器具有合理性,短时冲击信号作用下的性能表现满足指标要求。与传统PI控制器的对比结果表明,设计的鲁棒控制器能显著抑制随机扰动引起的电网负载频率波动,减小柴油发电机组与电池的功率变化,电池荷电状态(SOC)变化范围明显缩小,可提高船舶电力系统鲁棒稳定性与鲁棒性能。[结论]该系统在各种工况下都能稳定运行并且使电网频率稳定,同时提高柴油发电机组燃油经济性,减小废气排放。
混合电力推进;负载频率控制;线性矩阵不等式;混合灵敏度;H∞鲁棒控制
0 引 言
综合电力系统是未来船舶发展的主要方向[1],其功率分配控制与优化、系统故障诊断及电能质量分析是当前研究的热点[2-5]。电力推进船舶在航行过程中,受到风、浪及海流等多种随机不确定因素的干扰,进而带来船舶的输出功率与负载功率之间不平衡,导致船舶电网频率波动。而电网频率波动过大,将对船舶电气负载和导航通信设备造成严重损害,甚至影响船舶的安全航行。考虑到储能单元(电池、超级电容、飞轮等)对输入、输出功率响应速度快的特点,以及其零排放的环保特性,相关专家提出了采用储能单元与柴油发电机组组成混合电力推进系统的船舶[6-9],该推进系统不仅能快速响应负载功率的变化,减小船舶电网频率波动,而且还能提高燃油利用率,降低废气排放,受到广泛的关注与研究。
混合电力推进系统作为一个孤立的电网系统,在船舶航行过程中受环境因素的影响,主推进电机和螺旋桨变负荷运行及服务泵、侧推器等大功率电气负载并网/离网过程中都会对船舶电网产生较大冲击影响,从而对电力系统有着更高的安全性和容错性要求。因此,选取合理的能量控制策略对柴油发电机组和储能单元的输出功率进行分配是保证船舶稳定运行、减少废气排放的关键。针对该问题,已有学者做了大量研究工作。Park等[10-12]采用模型预测方法,对船舶综合电力系统负载功率进行预测和实时控制,利用集成扰动分析(Integrated Perturbation Analysls,IPA)和序列二次规划算法(Sequential Quadratic programming,SQP)对包含约束条件的预测模型进行了求解。该方法对船舶电力系统的脉冲扰动和负载功率预测有较好的实时控制效果。Backlund等[13]设计了一种带状分布式船舶综合电力系统模型,基于分类引导的采样方式,通过遗传算法对高性能工况下的船舶燃油消耗进行优化控制。Zhan等[14-15]提出改进后的遗传算法对柴油发电机组和蓄电池输出功率进行了优化控制,与传统遗传算法相比,改进后的遗传算法可提高求解过程的收敛速度。Im等[16]为了消除脉冲负荷对船舶综合电力系统的影响,对储能单元采用模式切换的能量控制方案,采用PI控制和反馈线性化控制2种方法实现了储能单元快速平滑的充放电过程。Trovão等[17-18]对船舶功率按照时间尺度分为长时功率需求和瞬时干扰抑制,根据功率需求不同提出了分层的多级能量控制策略。该控制策略没有计算上的延迟,实时性较好。针对包含电池储能单元的船舶综合电力系统,Kim等[19]对燃油消耗、故障诊断和电能质量进行分析,建立了船舶综合电力系统仿真模型,通过实施控制策略对综合电力系统工作模型进行切换。上述工作从控制和优化的角度,针对船舶综合电力系统中柴油发电机组和储能单元的输出功率进行合理分配,以响应负载功率的变化,其控制策略在实时性和实用性上取得了一定成果,但是没有考虑电网频率变化和电能质量。Li等[4]提出了一种可控电感的电源滤波方式,设计包含了线性滤波电感的整流变压器拓扑电路以抑制谐波振荡,以提高船舶电力系统的电能质量。Skjong等[20]设计了一种单向有源滤波器,使用模型预测控制方法消除船舶电力系统中的谐波畸变,但该控制策略没有给出机组之间的能量分配方案。Kim等[21]设计了一种与电池直接相连的有源前端变换器,通过控制变换器达到提高船舶电力系统稳定性和电能质量的目的,该方法对船舶电能质量的提高和功率分配都取得一定的控制效果,但未针对系统鲁棒性进行研究。
从上述分析中可以看出,船舶综合电力系统受环境影响,对能量控制策略和电网频率具有较高的鲁棒性和鲁棒稳定性要求。因此,本文将基于混合灵敏度原理设计鲁棒控制器,对柴油发电机组进行二次调频控制,在抑制电网频率波动的同时对柴油发电机组和电池的输出功率进行分配。
1 系统模型描述
1.1 系统结构布局
混合电力推进船舶由柴油发电机组、蓄电池、直流母线、电气负载和推进器组成,结构布局如图1所示。

图1 电力推进船舶结构布局Fig.1 Configuration of electric propulsion ship
柴油发电机组作为最主要的能量来源时,通过原动机带动同步发电机输出三相交流电。电池利用其快速充放电特性,平衡负载功率与柴油发电机输出功率之间的差值,起到“削峰填谷”的作用。柴油发电机组和电池组共同组成系统能量来源时,通过整流升降压变换与直流母线相连。系统负载主要包括推进电机带动的螺旋桨负载和电气负载,如服务泵、侧推器和导航设备等,经过逆变过程从直流母线吸收功率。为了满足船舶满负荷运行时的大功率需求和电力系统较高的故障冗余性需求,船舶电站通常配置2台或者2台以上的柴油发电机组。本文以柴油发电机组和电池组成的单区域船舶综合电力系统作为研究对象。
1.2 负载模型
船舶在运行过程中,主推进电机的启/停与变负荷工作,或侧推器、服务泵机等大功率电机的启/停与变负荷运行,都会对船舶电网产生较大冲击。船舶电网的电力负荷变化可以看作是发电机的干扰信号,当负荷变化时,立即反映为发电机的电转矩变化,引起柴油机机械转矩和电转矩的不平衡,导致发电机运行过程中转速的变化,从而引起有功功率不稳定,最终产生电网的频率波动。船舶电网功率平衡可以由下式表示:

式中:ΔP为船舶电网功率变化;ΔPdeg为柴油发电机组功率变化;ΔPbat为电池功率变化,其中当电池输出功率时为正,电池吸收功率时为负;ΔPload为船舶负载功率。
同步发电机转子运动线性化方程的标幺值形式为

式中:M为惯性系数;D为阻尼系数;δ为电角速度;ω为转速。对上式作拉氏变换,得到

通过转速与频率之间的关系,可进一步表示为惯性环节:

式中,Δf为系统频率的变化。
1.3 动力系统模型
混合电力推进船舶的动力源由柴油发电机组和电池组成,其中柴油发电机组作为主要的功率输出单元,电池作为辅助单元。
柴油发电机组由调速机、原动机和发电机组成。调速器是原动机的一个重要组成部分,其作用是自动维持机组的转速,在机组间分配负荷,通过控制汽门的开关进而控制进入原动机的动力。调速器具有负荷增加时速度下降的特性,可用积分环节增加一个静态反馈环实现:

式中:ΔXg为调速机输出;Tg为调速机时间常数;Δug为系统输入;R0为调节系数。
原动机是整个机组的出力部分,通过对燃料做功,将化学能转化为动能输出,带动发电机转子运动。其动态过程用一阶惯性环节表示为

式中:Tdeg为原动机时间常数。
电池因其快速充放电性能作为辅助能量源,忽略温度和内阻变化,其动态过程用一阶惯性环节表示为

式中:Tbat为电池时间常数。
1.4 系统状态空间模型
根据上文,可以建立混合电力推进船舶负载频率控制模型,如图2所示。
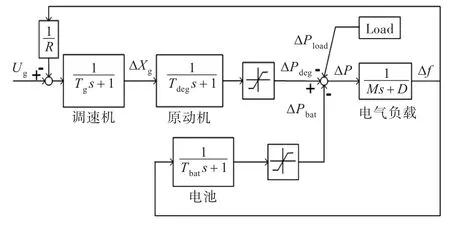
图2 负载频率控制模型Fig.2 Load frequency control model
系统参数如表1所示。

表1 系统参数Table 1 System parameters
根据图2,代入系统参数可以得到系统线性状态空间方程:

式中:̇为系统状态;w为系统扰动;u为系统输入;y为系统输出;A,B1,B2,C为系数矩阵。
将系统参数代入上式矩阵,得

式中:xT=[ΔXgΔPdegΔPbatΔf];w=ΔPload。
2 混合灵敏度H∞控制
混合灵敏度控制框图如图3所示。图中:r为参考输入;d为外部干扰输入;e为跟踪误差;u为控制器输出,同时作为控制对象输入;y为系统输出,并作为控制器输入信号;z1~z3为性能信号指标,表示对系统控制效果的评价;G为广义被控对象;K为控制器;W1~W3为加权函数。

图3 混合灵敏度控制Fig.3 Mixed sensitivity control
设广义被控对象G的状态空间实现为
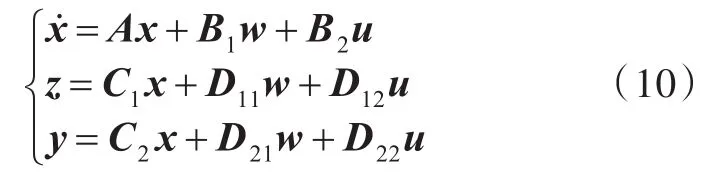
式中,x∈Rn,y∈Rq,w∈Rr,u∈Rp,z=[z1z2z3]T。
相应的传递函数矩阵为:
为保证设计的控制器K(s)为真实有理函数,要求式中D12为列满秩且D21为行满秩,通常选取单位阵I满足此要求。加权函数W2,W3为真实有理函数,可保证G为严格真。
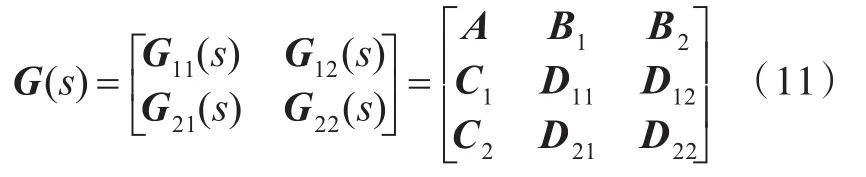
用线性分式变换(Linear Fractional Transfor⁃mation,LFT)得到H∞标准控制结构FL(G,K),如图4所示。
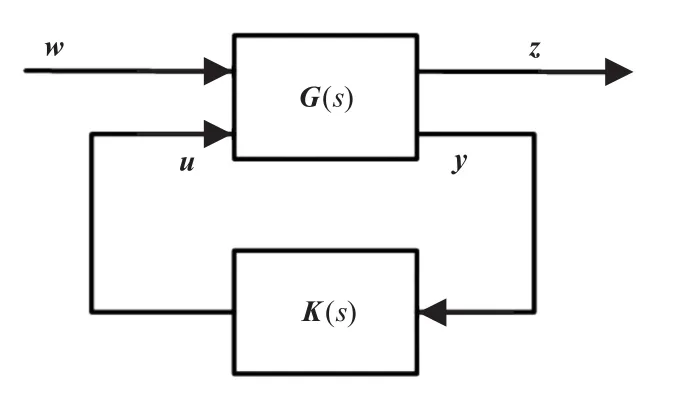
图4 LFT变换的标准H∞控制Fig.4 StandardH∞control of LFT transformation
图4中,从w到z的闭环传递函数矩阵为

式中,I为单位矩阵。Tzw(s)可进一步表示为

式中:S为灵敏度函数;R为互补灵敏度函数;T为补灵敏度函数。

H∞控制器设计问题为寻找真实有理函数控制器K,以使闭环系统稳定,并且使得传递函数矩阵Tzw(s)的H∞范数极小化,即
将上式转化为

由式(19)可知,通过选择适当的W1,W2,W3可使S/R/T达到设计要求。从灵敏度函数定义可知,S为系统干扰输入d到输出y的传递函数,也可以看作系统输入r到跟踪误差e的传递函数。在理想情况下,系统的抗干扰能力强,可使得系统的输出误差较小,因此要求系统在低频段的灵敏度函数增益要小。从补灵敏度函数的闭环传递函数可知,T为衡量系统在乘性扰动下对输出影响大小的指标,因此要求补灵敏度加权函数具有较大的剪切频率及在高频段有较大的系统增益。
3 控制器的LMI方法求解
针对混合电力推进船舶负载频率控制系统式(9),基于混合灵敏度原理设计H∞控制器,通过线性矩阵不等式(Linear Matrix Inequality,LMI)方法,对设计的控制器进行求解。给定一个γ,设计控制器K(s)满足:
式中,Z=(I-γ-2YX)-1,其中X,Y为代数RICCATI方程(22)的解。

根据加权函数选取规则给定加权函数:

加权函数的选择,对S/R/T的返回值必须满足以下不等式:
式中:W1为低通滤波器,为了使系统具有满意的动态特性,适当减小其低频段增益,使系统具有较强的抗干扰能力,同时减小跟踪误差;W2设计为高通滤波器以减小系统信号幅值,保证系统控制器的鲁棒稳定性;W3可以取常数。利用Matlab中的鲁棒控制工具箱,对设计的系统求解H∞控制器:

系统扰动到输出的幅频特性曲线如图5所示。

图5 系统扰动幅频特性曲线图Fig.5 Bode diagram of the perturbed system
从图5中可看出,由于干扰作用影响,使得系统闭环传递函数幅频特性表现出较大的谐振峰值。图6和图7为基于LMI方法求解鲁棒控制器的幅频特性。从图6中可看出,加权闭环系统最大的奇异值约为0.84,是小于1的,因此满足式(18)所示的系统鲁棒稳定性要求。从图7的S,T幅频特性可看出,加入H∞后,互补灵敏度函数S,补灵敏度函数T上界小于下界,满足式(24)所示的系统鲁棒性能的设计要求。图8为系统稳定运行过程中,受到10%额定负载短时冲击下的系统性能指标。从图中看出,与传统PI控制相比,H∞控制器使得系统频率变化、柴油发电机组输出功率变化以及电池输出功率变化具有更小的超调量和更短的稳定时间。
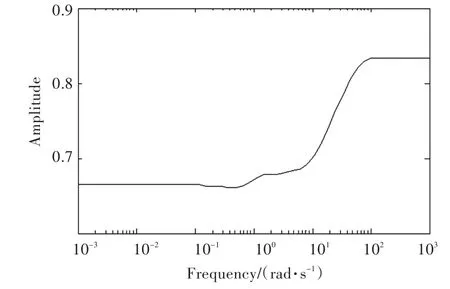
图6 加权闭环系统奇异值变化Fig.6 Singular value variation of weighted closed loop system

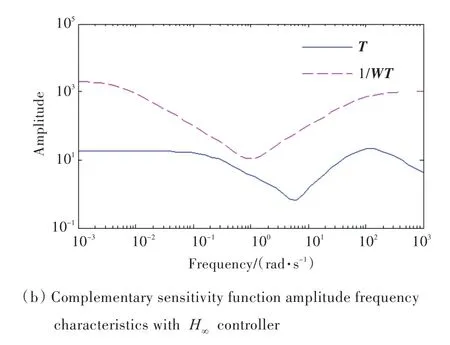
图7 加入H∞控制器S,T幅频特性Fig.7 Amplitude frequency characteristics ofS/Tfunction withH∞controller
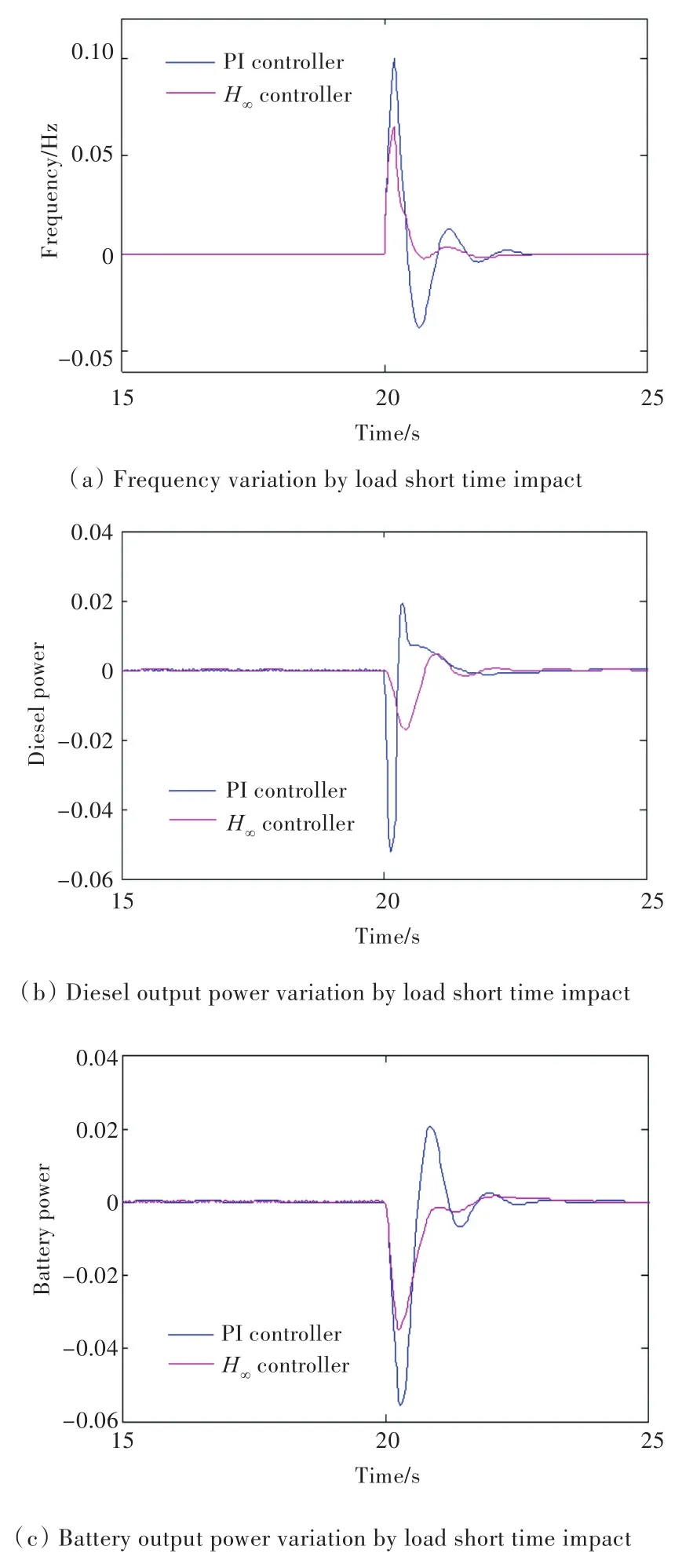
图8 负荷短时冲击时系统性能变化Fig.8 System performance variation by load short time impact
4 仿真分析
为了验证基于H∞鲁棒控制器的有效性,文章设计仿真试验进行验证。系统参数采用表1所列数值,仿真时间进行300 s。从图9中可看出,引入电池储能的混合电力推进系统频率变化幅值在±0.01Hz内,明显小于不含电池的综合电力系统,说明由于电池快速吸收与输出功率的特性,使得系统在外部扰动情况下可保持频率稳定。

图9 引入电池前后电网频率变化Fig.9 Comparison offrequency deviation with and withoutbattery
图10为设计的鲁棒控制器与传统PI控制的效果对比。从图中可以看出,使用传统的PI控制器,随机扰动下系统频率变化在±0.01 Hz范围内;而基于H∞的鲁棒控制器使得系统频率变化范围为±0.005 Hz。基于H∞的鲁棒控制器可明显抑制系统波动,保证电网频率稳定。

图10 船舶电网负载频率变化Fig.10 Load frequency deviation
图11和图12分别为柴油发电机组与电池输出功率的变化。从图中可以看出,设计的鲁棒控制器能更明显地减小柴油发电机组输出功率和电池功率波动。电池由于其快速充放电特性,其输入输出功率对负载扰动功率变化的响应较大,在初始电池荷电状态(State of Charge,SOC)为0.5时的控制结果如图13所示。从图中看出,鲁棒控制器能明显抑制电池电量的变化,减小充放电过程。
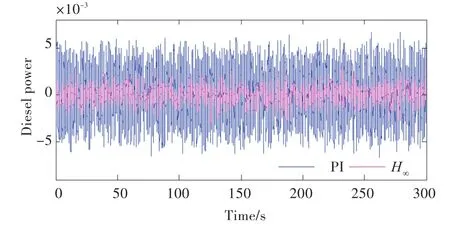
图11 柴油发电机组功率变化Fig.11 Deviaton of diesel generator output power
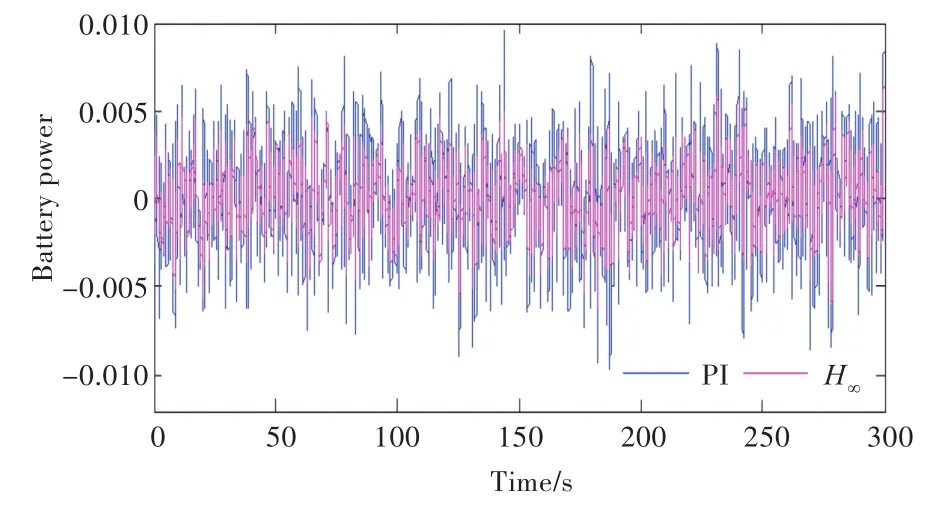
图12 电池功率变化Fig.12 Deviation of battery power
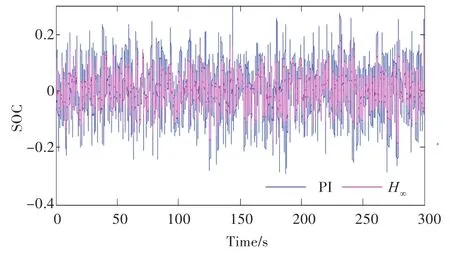
图13 电池SOC变化Fig.13 Deviation of battery SOC
基于H∞的鲁棒控制器与PI控制器的仿真效果对比如表2所示。

表2 PI与H∞控制器对比Table 2 Contrast of PI andH∞controller
从表中可以看出,设计的鲁棒控制器对原动机的二次调频可取得较好的控制效果,能保证原动机在额定输出功率附近有较小的变化,使其尽可能在最佳工作区域运行,从而提高原动机的燃油经济性,减少废气排放。通过调整原动机输出有功功率,减小系统频率在连续随机外部干扰下的波动。在PI控制下,电池SOC变化范围为0.2~0.8,而鲁棒控制则将电池SOC变化范围缩小为0.4~0.6,可避免电池的过充过放情况,保证了电池的安全和使用寿命。
5 结 语
为了减小船舶综合电力系统负载频率因风、浪及海流等多种随机不确定干扰引起的波动,本文引入了电池储能补偿柴油发电机组输出功率与船舶需求功率之间的差值。基于混合灵敏度原理设计H∞鲁棒控制器,对原动机进行二次调频控制。系统幅频特性表明,所设计控制器具有较好的鲁棒稳定性与鲁棒性能;仿真试验结果表明,对抑制系统负载频率波动可取得较好的控制效果。本文提出的H∞鲁棒控制器可保证船舶综合电力系统在各种工况下能稳定运行且使电网频率稳定,同时还能提高柴油发电机组的燃油经济性,减少废气排放。
[1]马伟明.电力电子在舰船电力系统中的典型应用[J].电工技术学报,2011,26(5):1-7.MA W M.Typical applications of power electronics in naval ship power systems[J].Transactions of China Electrotechnical Society,2011,26(5):1-7(in Chi⁃nese).
[2]马伟明.舰船综合电力系统中的机电能量转换技术[J].电气工程学报,2015,10(4):3-10.MA W M.Electromechanical power conversion technol⁃ogies in vessel integrated power system[J].Journal of Electrical Engineering,2015,10(4):3-10(in Chi⁃nese).
[3]刘胜,程垠钟.基于小信号模型的船舶中压直流发电系统稳定性分析[J].中国电机工程学报,2015,35(8):1930-1939.LIU S,CHENG Y Z.Small signal model based stabili⁃ty analysis for shipboard medium voltage DC genera⁃tion systems[J].Proceedings of the CSEE,2015,35(8):1930-1939(in Chinese).
[4]LI Y,PENG Y J,LIU F,et al.A controllably induc⁃tive filtering method with transformer-integrated linear reactor for power quality improvement of shipboard power system[J].IEEE Transactions on Power Deliv⁃ery,2016(99):1-9.
[5]刘自程,郑泽东,彭凌,等.船舶电力推进中十五相感应电机同轴运行及容错控制策略[J].电工技术学报,2014,29(3):65-74.LIU Z C,ZHENG Z D,PENG L,et al.Fixed joint double fifteen-phase induction motorcontroland fault-tolerant control in ship propulsion system[J].Transactions of China Electrotechnical Society,2014,29(3):65-74(in Chinese).
[6]黄靖,张晓锋,陈雁,等.船舶综合电力系统多目标故障恢复模型及应用[J].电工技术学报,2010,25(3):130-137.HUANG J,ZHANG X F,CHEN Y,et al.Multiobjec⁃tive optimal model of service restoration for integrated ship power system and its application[J].Transactions of China Electrotechnical Society,2010,25(3):130-137(in Chinese).
[7]LALDIN O,MOSHIRVAZIRI M,TRESCASES O.Predictive algorithm for optimizing power flow in hy⁃brid ultracapacitor/battery storage systems for light electric vehicles[J].IEEE Transactions on Power Elec⁃tronics,2013,28(8):3882-3895.
[8]CHEN C,WANG X H,XIAO J M.An energy alloca⁃tion strategy for hybrid ship DC power system based on genetic algorithm[J].IETE Journal of Research,2015,62(3):301-306.
[9]梁晓龙,王善铭,冀路明,等.基于半物理模拟的柴电—燃联合动力系统控制策略[J].电工技术学报,2014,29(3):83-88(in Chinese).LIANG X L,WANG S M,JI L M,et al.Propulsion control strategy of combined diesel-electric and gas tur⁃bine systems based on semi-physical simulation[J].Transactions of China Electrotechnical Society,2014,29(3):83-88.
[10]PARK H,SUN J,PEKAREK S,et al.Real-time model predictive control for shipboard power manage⁃ment using the IPA-SQP approach[J].IEEE Transac⁃tions on Control Systems Technology,2015,23(6):2129-2143.
[11]SEENUMANI G,SUN J,PENG H.Real-time power management of integrated power systems in all elec⁃tric ships leveraging multi time scale property[J].IEEE Transactions on Control Systems Technology,2012,20(1):232-240.
[12]PARAN S,VU T V,EL MEZYANI T,et al.MPC-based power management in the shipboard pow⁃er system[C]//Proceedings of the Electric Ship Tech⁃nologies Symposium.Alexandria,VA:IEEE,2015.
[13]BACKLUND P B,SEEPERSAD C C,KIEHNE T M.All-electric ship energy system design using classifi⁃er-guided sampling[J].IEEE Transactions on Trans⁃portation Electrification,2015,1(1):77-85.
[14]ZHAN K Y,GAO H B,CHEN H,et al.Optimal ret⁃rofitting of a hybrid propulsion system using NSGA-II algorithm for trailing suction hopper dredger[C]//Pro⁃ceedings of the Electric Ship Technologies Sympo⁃sium.Alexandria,VA:IEEE,2015.
[15]SCIBERRAS E A,NORMAN R A.Multi-objective design of a hybrid propulsion system for marine ves⁃sels[J].IET Electrical Systems in Transportation,2012,2(3):148-157.
[16]IM W S,WANG C,TAN L,et al.Cooperative con⁃trols for pulsed power load accommodation in a ship⁃board power system[J].IEEE Transactions on Power Systems,2016,31(6):5181-5189.
[17]TROVÃO J P,MACHADO F,PEREIRINHA P G.Hybrid electric excursion ships power supply system based on a multiple energy storage system[J].IET Electrical Systems in Transportation,2016,6(3):190-201.
[18]SEENUMANI G,SUN J,PENG H.A hierarchical op⁃timal control strategy for power management of hybrid power systems in all electric ships applications[C]//Proceedings of the 49th IEEE Conference on Decision and Control.Atlanta,GA:IEEE,2010:3972-3977.
[19]KIM S Y,CHOE S,KO S,et al.A naval integrated power system with a battery energy storage system:fu⁃el efficiency,reliability,and quality of power[J].IEEE Electrification Magazine,2015,3(2):22-33.
[20]SKJONG E,SUUL J A,RYGG A,et al.Sys⁃tem-wide harmonic mitigation in a diesel-electric ship by model predictive control[J].IEEE Transac⁃tions on Industrial Electronics, 2016, 63(7):4008-4019.
[21]KIM S Y,CHOE S,KO S,et al.Electric propulsion naval ships with energy storage modules through AFE converters[J].Journal of Power Electronics,2014,14(2):402-412.
H∞robustcontrol of loadfrequencyindiesel-batteryhybridelectricpropulsionship
LI Hongyue,WANG Xihuai,XIAO Jianmei,CHEN Chen
Logistics Engineering College,Shanghai Maritime University,Shanghai 201306,China
Considering the load frequency fluctuation in the shipboard integrated power system caused by such stochastic uncertainty as wind,wave and current,the battery is adopted here to compensate for the difference between diesel generator output power and ship demand power,and the secondary frequency control is used for the diesel generator to guarantee the power balance in the shipboard integrated power system and suppress the frequency fluctuation.The load frequency control problem is modeled as a state space equation,the robust controller is designed by selecting the appropriate sensitivity function and complementary sensitivity function based on theH∞mixed sensitivity principle,and the controller is solved by the linear matrix inequality(LMI)approach.The amplitude frequency characteristics denote the reasonability of the designed controller and the design requirement is satisfied by the impact of the impulse signal.The simulation results show that,compared with the classical PI controller,the controller designed by theH∞robust method can significantly suppress frequency fluctuation under stochastic uncertainty,and improve the power variation of the diesel generator,battery and state of charge(SOC).The robust stability and robust performance of the power system are also advanced.
hybrid electric propulsion;load frequency control;linear matrix inequality(LMI);mixed sensitivity;H∞robust control
U665.13
:ADOI:10.3969/j.issn.1673-3185.2017.03.017

http://kns.cnki.net/kcms/detail/42.1755.TJ.20170512.1156.008.html期刊网址:www.ship-research.com
李洪跃,王锡淮,肖健梅,等.柴电混合电力推进船舶负载频率H∞鲁棒控制[J].中国舰船研究,2017,12(3):120-127.
LI H Y,WANG X H,XIAO J M,et al.H∞robust control of load frequency in diesel-battery hybrid electric propul⁃sion ship[J].Chinese Journal of Ship Research,2017,12(3):120-127.
2016-09-27< class="emphasis_bold">网络出版时间
时间:2017-5-12 11:56
国家自然科学基金资助项目(61573240);上海海事大学博士创新基金资助项目(2016YCX067)
李洪跃,男,1990年生,博士生。研究方向:船舶电力系统控制与优化。E-mail:201540211019@stu.shmtu.edu.cn
王锡淮(通信作者),男,1961年生,博士,教授,博士生导师。研究方向:复杂系统建模与控制,系统优化。E-mail:wxh@shmtu.edu.cn
