基于功率损失模型的混合动力系统能耗分析*
2017-07-21曾小华杨南南宋大凤肖利军巴特
曾小华,杨南南,宋大凤,肖利军,巴特
(1.吉林大学,汽车仿真与控制国家重点实验室,长春130025;2.重庆科鑫三佳车辆技术有限公司,重庆400714)
基于功率损失模型的混合动力系统能耗分析*
曾小华1,杨南南1,宋大凤1,肖利军2,巴特1
(1.吉林大学,汽车仿真与控制国家重点实验室,长春130025;2.重庆科鑫三佳车辆技术有限公司,重庆400714)
本文中根据两款典型混合动力系统(并联构型和行星构型)中不同工作区间的能量损失情况,建立了系统的平均功率损失模型,对两种系统的能耗进行深入的定量分析。整车燃油经济性仿真结果和功率损失分析结论验证了所提出方法的合理性。
混合动力汽车;能耗分析;功率损失
前言
近年来,国内外混合动力车,包括插电式混合动力汽车快速发展,市场上开始出现各类混合动力构型。其中,采用行星齿轮作为动力耦合装置的丰田混合动力系统最具代表性,截止2017年2月,其全球累计销量超过1 000万辆,且近年来平均每10个月增长100多万辆。另外,采用变速器配备单电机或双电机的混合动力系统,因其对传统车改动较小,在市场上,尤其是客车领域也具有良好应用前景。
当前针对各类混合动力系统的研究,主要集中在构型分析[1]、参数匹配[2-3]和控制策略[4]等方面。也有研究针对市场上主流混合动力系统构型的节油潜力进行对比分析。文献[5]中基于系统排放和油电价格对比分析了普锐斯和卡罗拉混合动力车的经济性。文献[6]中提出一种用于修正计算混合动力油耗的解析方法,该方法能有效考虑非线性的系统能量流和部件效率特性,因此能保证较好的修正效果。文献[7]中基于法规推荐的等效油耗计算方法,对影响并联混合动力客车油耗的关键因素进行了分析。另外,在控制策略的研究中,为分析所提出策略的合理性,往往也涉及对油耗预测结果的分析[8]。可见,当前对混合动力系统的经济性分析,多是基于仿真或实验结果,对整体油耗和电耗进行比较,说明新系统或新方法带来的节油效果。这样的对比分析只能从宏观角度说明系统的燃油经济性表现,缺乏针对细节的分析和探讨。然而,更加细化的油耗分析无论在早期开发还是后期优化都具有重要意义。首先,在系统开发的前期方案论证阶段,定量的油耗分析和细化的能耗损失分析既能辅助证明宏观油耗结果的合理性,又能揭示系统的节能机理,帮助开发者深入了解所开发系统的优缺点。另外,在实车控制系统开发和标定阶段,上述分析方法也有助于为研发和标定人员指明系统优化方向,为进一步提升整车燃油经济性做出贡献。
综上所述,针对混合动力汽车,一种具有通用性的细化能耗分析方法,在研发设计的各个阶段都具有重要意义。因此,本文中基于仿真结果建立混合动力系统的能量损失定量分析模型,通过对各模式的能量损失进行深入分析,提出一种定量的系统效率评价方法。
1 基于工况的能耗分析方法
混合动力系统节能的基本途径已被广泛认可,包括选用小发动机、优化发动机工作区间、消除怠速和再生制动4个方面。首先,消除怠速功能在混动系统中已被广泛实现,在行驶工况相同的条件下,各系统构型在消除怠速方面实现的节油效果相同。第二,再生制动回收的能量,可通过仿真中电池能量的变化统计得到,针对纯电动汽车,再生制动对总节能效果的贡献度相对容易评价[9],但由于混动系统涉及油电转化,再生制动的节能贡献度尚难以评价。第三,选用小发动机是通过提高发动机负荷率来实现节油效果,因此在系统构型确定后,其节能效果被转化为优化发动机工作区间带来的节能效果。
然而,无论是行星式混合动力系统还是并联系统,在优化发动机工作点的同时,都会带来额外的能量转换损失。行星构型的电路上存在能量二次转换,而并联构型在调节发动机工作点的同时也会因为机械能和电池电能的转换带来额外损失。可见,发动机工作区间优化所带来的节油效果和能量转换带来的损失始终是动态关联的,因此,在分析油耗时,应综合考虑发动机效率、机械效率和电路效率,而非仅仅考虑发动机的优化效果,这给混合动力系统的细节能耗分析带来了很大困难。
据此,本文中首先建立通用的混合动力系统能量损失模型,再考虑工作时间因素将其转化为平均损失功率模型。平均损失功率可间接表示系统在不同工作模式或不同工作区间内的工作效率。另外,由于能耗是功率在时间上的累积,本文中将时间因素转化为不同模式的权重因子,表征具体模式的效率对系统综合效率影响的比重。因此,结合平均损失功率和时间权重两个概念,本文中提出了一种新型的系统效率分析方法,以便于对混合动力系统的能耗进行细化分析。
1.1 系统能量损失模型
首先,在相同的运行工况下,系统的总能量损耗减少,系统的燃油经济性就越好。分析能量的损耗情况即可确定系统的综合效率。
第二,无论是何种混合动力系统,根据其发动机(停机、工作)和电池(充电、放电、不工作)的工作情况,都可将驱动模式分为4种,如表1所示。

表1 混合动力系统工作模式
第三,如前所述,由于当前混合动力系统都能实现怠速停机功能,而本文中所提出的方法主要是对混合动力系统的横向对比,因此不再考察消除怠速的节能贡献。
第四,再生制动会优化系统的燃油经济性,也相应地减小了系统的能量损耗。
根据以上分析,则混合动力系统的能量损失为

式中:Eloss,EV为纯电动模式下的系统能量损失; Eloss,HEV,i为第i个混合动力模式的能量损失,i∈[1,3],分别对应表1中3个发动机工作时的模式;Ergb为再生制动回收的能量。
1.2系统平均损失功率模型
由于不同系统的模式切换规则不同,不同模式的工作时间也就不同,所以,能量损失模型并不能反映系统在不同工作模式下的工作效率。考虑系统运行时间的影响,将系统的能量损失转化为功率损失:

式中:Ploss,avg为整个系统的平均损失功率;tall为系统的总运行时间;Ploss,EV为纯电动模式下的系统平均损失功率;Ploss,HEV,i为第i个混合动力模式下的系统平均损失功率;γEV=tEV/tall,为纯电动模式的工作时间比例;γHEV,i=tHEV,i/tall,为第i个混合动力模式下的工作时间比例;Prgb为再生制动能量相对驱动时间的平均功率,可说明再生制动对驱动损失的平均贡献。
可见,利用上述公式,可计算混合动力系统在不同工作模式下的平均损失功率,即不同工作模式的效率和具体工作模式的工作时间比例,即各模式对系统综合效率的影响权重,也可说明再生制动的节能贡献度。
1.3不同工作区间的损失功率模型
由于混合动力模式下,系统的损失功率来自发动机和传动系统(将发动机与系统输出之间的部分视作广义的传动系统)两部分。而发动机在不同区间工作时,效率差异也较大。因此,又可将混动模式下的损失功率表示为

式中:Peng,i,k,Ptrans,i,k和γi,k分别表示在第i个混动模式下,发动机工作在第k个区间内的发动机平均损失功率、传动系统平均损失功率和该工作区间的工作时间比例。
可见,经过进一步的细化分解,结合式(2)和式(3)可以分析不同混合动力模式下,发动机不同工作区间内的发动机效率和传动系统效率。
在仿真计算中,发动机的损失功率可根据发动机工作点及其MAP计算得到:

式中:Pe为发动机输出功率;be为发动机燃油消耗率,根据发动机工作点及其MAP查表得到;q为燃油的热值。
传动系统的损失功率为

式中:Pout为主减速器的输出功率;Pbat为电池功率,当电池充电时,Pbat>0,表示发动机的输出能量用于驱动车辆并给电池充电,当电池放电时,Pbat<0,表示电池和发动机共同输出能量,用于驱动车辆。
结合式(4)和式(5),可计算出全工况中所有驱动情况下的系统内部功率损失。
2 案例分析
利用上述分析方法,对两种典型混动系统(并联系统和行星混联系统)的节油效果进行详细分析,以验证分析方法的合理性。
2.1整车参数
针对相同的整车参数,分别建立双电机加两挡变速器的并联混合动力系统模型(以下简称“并联构型”,见图1)和行星排式混合动力系统模型(以下简称“行星构型”,见图2)。

图2 行星构型
两种系统都能实现混动系统的4种节能途径。其中,并联构型可利用两挡变速器调节发动机转速和转矩,并利用电机调节发动机转矩,使发动机尽可能工作在高效区间;行星构型具有转速和转矩双解耦的能力,可将发动机控制在最优工作曲线上。两种系统的基本参数如表2所示。

表2 基本参数
2.2油耗结果
在典型城市工况下对两种系统进行仿真,都能良好地实现车速跟随,满足典型工况的动力性要求,如图3所示。

图3 工况跟随情况
经济性仿真结果如表3所示。

表3 经济性仿真结果
2.3细节能耗分析
根据前文所述方法,对两种系统进行能耗分析。首先根据仿真结果统计两系统的驱动模式工作时间比例,再对各模式下的平均损失功率进行统计计算。
2.3.1各模式工作时间比例
首先统计两种构型各模式的工作时间比例,即计算得到式(2)中的γEV和γHEV,i,如表4所示。
由统计结果可知,两种系统都没有工作在发动机直接驱动模式下。其中,行星构型因为始终有部分发动机功率需要流经电路才能最终输出,受到两电机效率的影响,很难保证输入和输出功率完全相同,故系统中始终存在少量的电池功率(充电或放电)。而并联构型采用外特性策略,即尽可能地将发动机控制在外特性上。当需求功率较小时,将对电池充电;当需求功率较大时,则需要电池放电,因此也没有发动机直接驱动模式。

表4 工作模式分布时间比例%
另外,由于并联构型长时间运行在驱动并发电模式下,其电池被充电至较高SOC状态,为保证系统电量平衡,纯电动模式的工作时间比例相应增大,达到72%。而行星构型的充电情况较少,其纯电动模式消耗的电能几乎全部由再生制动回收得到,因此,行星构型的纯电动行驶时间比例相对较小。
2.3.2纯电动模式平均损失功率
在纯电动模式下,发动机关闭,系统所需的全部功率由电池提供,因此,按照前文的定义方式,纯电动模式下仅存在传动损失,即式(5)中的发动机输出功率始终为0。计算得到纯电动模式下的平均损失功率,即式(2)中的Ploss,EV,如表5所示。

表5 纯电动模式平均损失功率
将两种系统在纯电动模式下的电机工作点映射到电机MAP图上,如图4所示。两种系统的电机MAP的效率分布较为接近,电机工作点的分布也较为类似,且采用相同的电池参数,因此两种系统在纯电动模式下的平均损失功率必然较为接近,可见计算结果合理。

图4 电机工作点分布
2.3.3混合动力模式平均损失功率
根据式(3),混动模式下的系统损失功率包括
发动机损失Peng,i,k和传动损失Ptrans,i,k两部分。首先根据发动机万有特性(如图5所示),将发动机MAP划分为不同工作区间,转速区间为0~900,900~1 400,1 400~1 900和1 900~2 500r/min,负荷率区间为0~30%,30%~60%和60%~100%。

图5 发动机MAP图
(1)发动机驱动并发电模式
针对发动机驱动并发电模式,统计两种系统在发动机各个区间内的工作时间比例,如图6所示。

图6 发动机各区间时间比例
并联构型采用外特性策略,因此所有工作点分布在高负荷区间。另外,并联构型不能实现转速解耦,因此900~2 500r/min的区间都有工作点分布。行星构型采用基于发动机最优工作曲线的功率跟随策略,其工作点分布与发动机功率紧密相关,而该模式下需求功率通常较小,因此行星构型的工作点几乎全部分布在低速、中等负荷区间。
两种系统的发动机平均损失功率如图7所示。并联构型的外特性策略在提高发动机负荷率的同时,也带来了较高的发动机损失功率,在高速、高负荷区间内尤为明显。相比之下,行星构型将发动机控制在中等转速、中高负荷区间,发动机损失明显减小。

图7 发动机平均损失功率
两种构型的传动损失统计如图8所示。与发动机功率损失类似,并联构型在高负荷、高转速区间时,传动系统也有较高的功率损失,而在中低速区间相对较小。行星构型因其功率分流特性,始终存在电功率流,在低速区间的功率损失较大。
根据以上统计结果,将数据代入式(3),可计算出该模式下两种系统的平均功率损失,见表6。可见,虽然行星构型在部分区间的损失功率较高,但由于工作点集中在900~1 400 r/min与30%~60%的区间,整个模式下的平均损失功率显著低于并联模式。
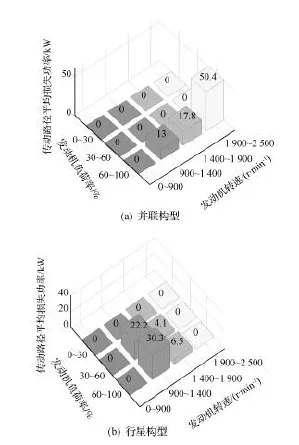
图8 传动系平均损失功率
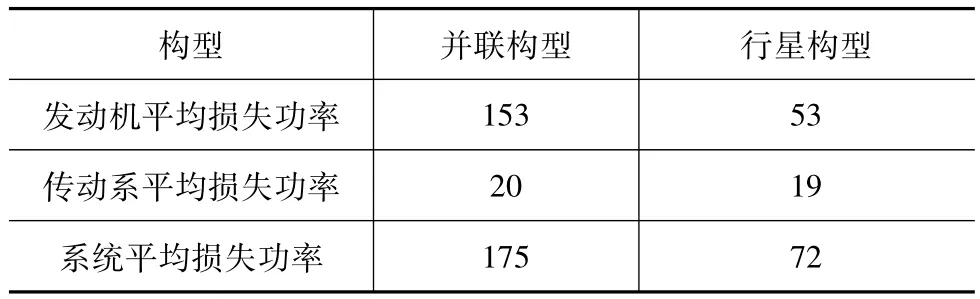
表6 驱动并发电模式的平均损失功率kW
如上所述,较多的发动机驱动并充电模式会带来更多的纯电动模式,而根据上节的分析结果可知,纯电动模式的平均功率损失非常小。所以,虽然并联构型在该模式下的平均功率损失远远大于行星构型,但不能就此认为并联构型的驱动并发电模式会恶化整车的燃油经济性,还应将结合系统中其他使用电量的模式进行综合判定。
(2)联合驱动模式
方法同上,可统计得到联合驱动模式下,两种系统的功率损失情况与工作时间的比例,此处不再详细分析。两种系统在该模式下的平均功率损失情况如表7所示。
2.3.4综合平均损失功率
以上分析计算,已经分别得到两种系统在不同模式下的平均损失功率和工作时间比例。进一步,结合式(2)可算出两种系统在全工况下的平均损失功率,并联构型为40.25kW,行星构型为38.96kW。综上可知,外特性策略使并联构型长时间工作在驱动并发电模式下,获得了更大的纯电动行驶比例,大幅降低了驱动时的平均功率损失。而行星构型的纯电动行驶比例虽然相对较小,但各模式下的平均功率损失都明显优于并联构型,从而具有更小的系统平均功率损失。因此,单就驱动情况而言,在当前策略下,行星系统的综合效率优于并联构型。以上分析也为并联构型的改进提供了基础,综合考虑发电模式和纯电动模式的效率,优化两者的比例,可进一步提升系统综合效率。
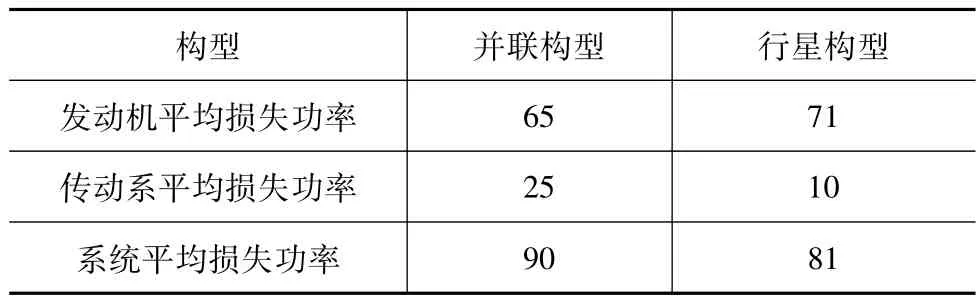
表7 联合驱动模式平均损失功率kW
最后,统计两种系统回收的再生制动能量,计算再生制动的补偿功率,即式(2)中的Prgb,最终得到系统的综合平均损失功率Ploss,avg,如表8所示。

表8 系统综合平均损失功率统计kW
由于两种系统的主电机功率等级相同,仅由于电机的传动比不同而导致两种系统再生制动补偿功率略有不同。同时,再生制动将两种系统的功率损失分别降低了37%和40%,对系统综合效率的提升具有显著贡献。最终,行星构型的综合效率仍优于并联构型,与整车油耗仿真结果一致。
3 结论
本文中结合混合动力系统的基本节能途径,通过建立混合动力系统的能量损失模型,考虑不同模式下、不同工作区间内的系统能量损失情况,最终形成混合动力系统的平均损失功率模型。该模型既可有效说明不同模式的运行效率,也能表征不同模式对系统综合效率的影响权重。可见,针对混合动力系统的细化能耗特性,该模型提供了一种具有通用性的量化评价方法。
本文中所提出的混合动力系统能耗分析与评价方法,为不同构型的对标分析提供了量化依据,也为混合动力系统控制策略的优化提供了理论基础,有效提升混合动力系统的开发效率。
[1]WANG W,SONG R,GUO M,et al.Analysis on compound-split configuration of power-split hybrid electric vehicle[J].Mechanism and Machine Theory,2014,78:272-288.
[2]彭志远,秦大同,段志辉,等.新型混合动力汽车工作模式分析与参数匹配设计[J].中国机械工程,2012,23(9):1122-1128.
[3]ZENG X,YANG N,WANG J,et al.Predictive-model-based dynamic coordination control strategy for power-split hybrid electric bus[J].Mechanical System and Signal Processing,2015(60-61):785-798.
[4]左义和,项昌乐,闫清东,等.基于动态规划算法的混联混合动力汽车控制策略[J].吉林大学学报(工学版),2011,41 (4):898-903.
[5]LAVE L B,MACLEAN H L.An environmental-economy evaluation of hybrid electric vehicles:Toyota’s Prius vs.its conventional internal combustion engine Corolla[J].Transportation Research Part D,2002,7(2):155-162.
[6]KATRANIK T.Analytical method to evaluate fuel consumption of hybrid electric vehicles at balanced energy content of the electric storage devices[J].Applied Energy,2010,87(11):3330-3339.
[7]李腾腾,秦孔建,高俊华,等.并联混合动力客车等效燃油经济性分析[J].汽车工程,2012,34(4):297-300.
[8]曾育平,秦大同,苏岭,等.计及驾驶室供暖功率需求的插电式混合动力汽车实时控制策略[J].汽车工程,2016,38(1): 109-115.
[9]姚亮,初亮,周飞鲲,等.纯电动轿车制动能量回收节能潜力仿真分析[J].吉林大学学报(工学版),2013,43(1):6-11.
HEV Energy Consumption Analysis Based on Power Loss Model
Zeng Xiaohua1,Yang Nannan1,Song Dafeng1,Xiao Lijun2&Ba Te1
1.Jilin University,State Key Laboratory of Automotive Simulation and Control,Changchun 130025; 2.Chongqing CO-Sunjoy Vehicle Technology Co.,Ltd.,Chongqing 400714
In this paper,based on the energy loss patterns in different working regions of two typical hybrid power systems(parallel configuration and planetary configuration),an average power loss model is established to conduct an in-depth quantitative analysis on the energy consumption of two systems.The results of vehicle fuel economy simulation and the conclusion of power loss analysis verify the reasonableness of method proposed.
HEV;energy consumption analysis;power loss model
10.19562/j.chinasae.qcgc.2017.06.004
*国家自然科学基金(51575112和51675214)、吉林省科技项目(20160519008JH)和吉林大学研究生创新基金项目(2016083)资助。
原稿收到日期为2016年5月31日,修改稿收到日期为2016年8月16日。
宋大凤,副教授,博士,E-mail:songdf@jlu.edu.cn。
