基于离散状态事件驱动的电力电子瞬态过程仿真方法
2017-07-18赵争鸣李帛洋凌亚涛陈凯楠
檀 添 赵争鸣 李帛洋 凌亚涛 陈凯楠
(清华大学电机系 电力系统及发电设备安全控制和仿真国家重点实验室 北京 100084)
基于离散状态事件驱动的电力电子瞬态过程仿真方法
檀 添 赵争鸣 李帛洋 凌亚涛 陈凯楠
(清华大学电机系 电力系统及发电设备安全控制和仿真国家重点实验室 北京 100084)
为分析计算电力电子系统的电磁瞬态过程,需采用非理想开关器件模型,并计及电路中的杂散参数和控制回路中的时间延迟等,此时描述电力电子系统的数学模型呈现出高阶非线性特性,且往往具有较强的刚性。采用常规微分方程的数值解算方法对于这种非线性的电力电子系统瞬态过程进行仿真求解,存在仿真时间超长和数值稳定性很差的问题。为解决这一问题,基于离散状态事件驱动(DSED)思想提出一类电力电子瞬态过程数值仿真方法,摒弃对时间离散的常规数值解算,而直接以状态量的变化值作为仿真计算依据。理论推证和仿真解算比较结果表明:该方法能有效缩短解算时间,同时解决了常微分方程组的刚性问题,使得解算具有很好的数值稳定性。
电力电子瞬态分析 离散状态事件驱动 仿真计算
0 引言
电力电子变换过程是一种利用弱电控制强电,实现电量变换的过程。在基于脉冲调制的电力电子变换系统中存在信号脉冲、驱动脉冲、能量脉冲三种形式的脉冲序列[1]。其中,能量脉冲序列是电力电子系统实现电能变换的基本形式[2]。由于功率开关器件非理想因素[3,4]产生的死区[5]、最小脉宽[6]设置以及变换器线路杂散参数[7,8]的共同影响,变换器输出的能量脉冲相对理想的信号脉冲存在延迟和畸变,这不仅对能量脉冲控制造成困难,产生“控制盲区”,甚至会产生异常脉冲和破坏性脉冲[9],使系统或其中的器件发生失效或损坏,影响装置的稳定性和可靠性,而电力电子变换装置中大部分失效发生在电磁瞬态过程中[9]。因此,进行电力电子系统瞬态过程的仿真分析对提高控制精度、解决能量脉冲延迟畸变导致的电力电子装置失效问题以及提高系统稳定性和可靠性具有重要意义。
目前,常用的电力电子仿真软件有Matlab、PSpice、PSIM等。文献[10]列举了各类电力电子仿真软件的数值算法、开关器件模型及应用特性等,其中关于上述三种仿真软件的特性对比见表1[10]。
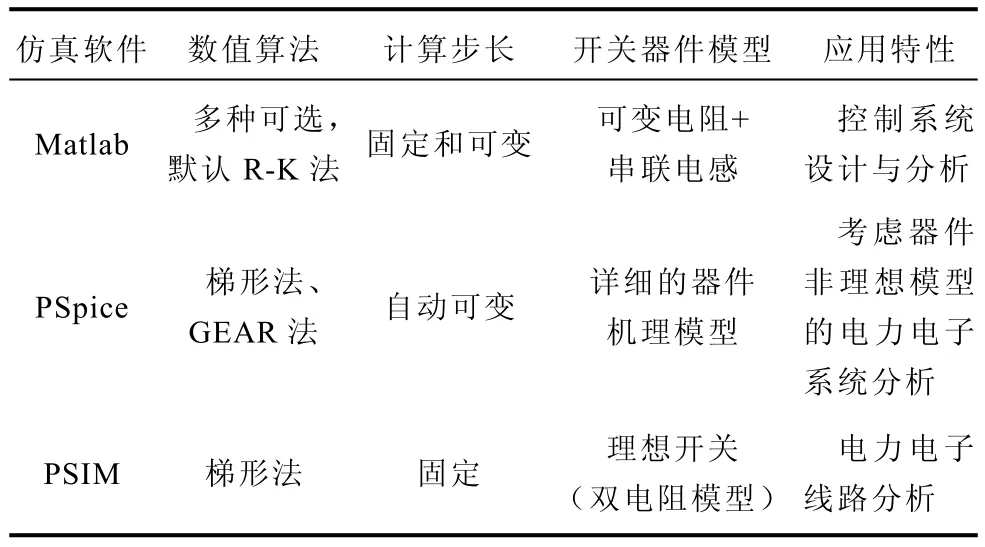
表1 Matlab、PSpice、PSIM的特性对比Tab.1 Feature comparison of Matlab, PSpice and PSIM
在电力电子系统瞬态分析中,由于系统复杂、存在耦合参数且各变量时间常数相差大[9],系统的状态方程呈现出不连续点多、非线性和刚性强的特征,使用常规数值方法(如表1中的梯形法、R-K法等)不仅需要进行迭代或插值以判定不连续点,严重拖慢仿真速度,而且会面临严重的数值不稳定现象,算法收敛性差。使用变步长算法时,为防止数值不稳定现象发生,仿真步长将急剧缩小[11],从而导致超长的仿真时间,不满足实际运用的需要。为解决刚性系统仿真问题,Matlab自带有刚性常微分方程组(Ordinary Differential Equation, ODE)数值解法[12],见表2。真的数值稳定性问题,然而其单步计算量大和算法复杂的特性同样导致仿真时间过长。
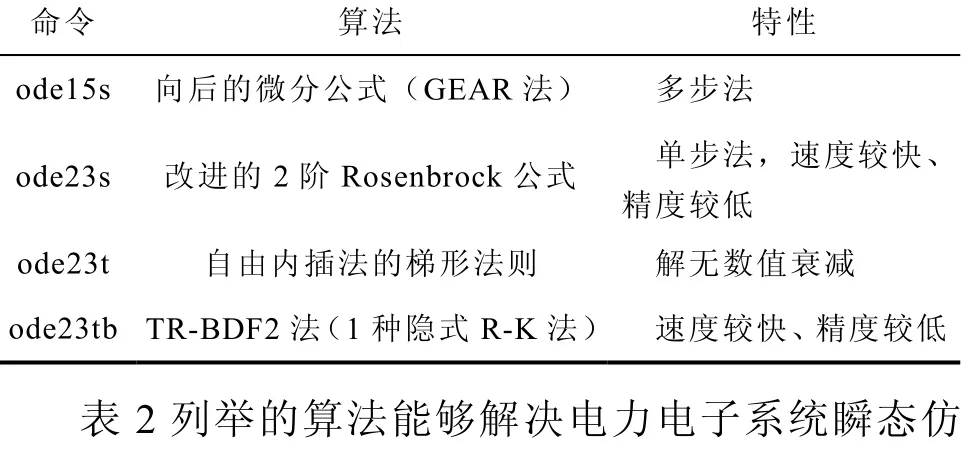
表2 Matlab中自带的刚性常微分方程数值解法Tab.2 Numerical methods for stiff ODEs in Matlab
为解决上述问题,本文在电力电子系统瞬态分析中参照由Ernesto Kofman等提出的数值分析量化状态系统(Quantized State System, QSS)算法[13-18],针对该算法的自身缺陷和电力电子系统仿真分析的实际需求应用前文提出的基于离散状态事件驱动(Discrete State Event Driven, DSED)的电力电子系统瞬态过程仿真方法[19],且在原有QSS算法中加入导数限幅及所有状态变量的导数线性化预估和校正,分别得到了DSED1和LIDSED1算法。最后以考虑非理想器件和线路杂散参数的三相两电平逆变器为仿真对象,通过理论分析和算例应用对比的方式论证了该方法在电力电子系统瞬态分析应用中的有效性。
本文所有算例均使用处理器主频3.6GHz计算机在Matlab平台实现。
1 DSED方法在电力电子系统瞬态仿真中的实现
如引言中所述,使用DSED方法的主要目的是解决电力电子混杂系统数值仿真中的算法收敛性和速度问题,其核心是状态离散和事件驱动。下面首先介绍DSED方法在电力电子系统仿真中的实现步骤。
1)进行系统参数的求取,并根据系统参数列写系统状态方程。
第k-1步计算得到系统所有状态变量xi的Q函数Q(k-1)(x)构成向量Q(k-1),x(change)为第k-1i步计算中唯一改变的状态变量,其Q函数为Q(k-1)(x(change)),其中

式中,ΔiQ为xi的量化长度,第k步计算中系统所有输入ui(k)构成向量U(k),和第k-1步比较发生变化的输入构成向量U(k)(change),则Q(k-1)(x(change))和U(k)(change)构成第k步计算中的“事件”,用“event(k)”表示为

则第k步计算中系统所有参数值c(k)构成的向量iC(k)由此步事件决定,即得到各参数值后根据模型特征和基尔霍夫定律列写第k步计算的系统状态方程为式中,矩阵A(k)(C(k))、B(k)(C(k))均由C(k)决定,x、x˙分别为所有状态变量、所有状态变量的导数构成的向量;u为系统输入。


2)使用基于量化状态系统的数值计算方法进一步进行数值ODE计算。
计算输入Q(k-1)、x(k)决定该步状态方程的矩阵A(k)(C(k))与B(k)(C(k))以及第k-1步计算结束时刻t(k-1),输出为第k步计算得到的系统所有状态变量xi的Q函数Q(k)(xi)构成的向量Q(k)、所有状态变量构成的向量x(k)和第k步计算结束时刻t(k)。
3)判断t(k)和设定的仿真终止时刻T的大小关系,若t(k)<T则继续进行第k+1步运算,若t(k)≥T,则终止仿真,输出仿真结果。
DSED方法在电力电子系统仿真中的使用流程如图1所示。
从上述实现步骤中可以看到,DSED方法在电力电子系统仿真中具有如下优势:
(1)算法简单。求解数值ODE方程组使用的量化状态系统算法为显式算法,且不存在任何迭代,相对传统变步长刚性算法程序实现较为容易,单步计算量小。
(2)仿真速度快。DSED方法固有的变步长性质和较小的单步计算量使其相对传统数值算法具有速度优势;同时,由于采用量化状态系统的思想,每步计算仅改变一个状态变量Q函数,所以每步计算在确定模型参数时,仅仅需要重新计算与上一步计算唯一改变Q函数的状态变量和该步计算改变的输入值有关的参数,相对传统仿真方法减少了计算参数时的判断和计算次数,这也使仿真速度得到提升。
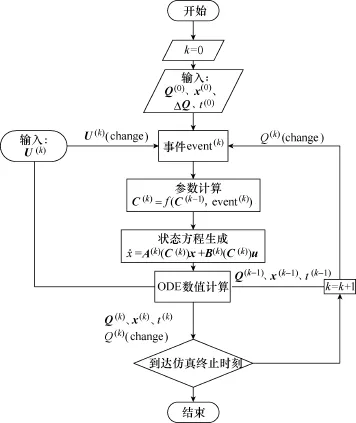
图1 DSED的实现流程Fig.1 The implementation process of DSED
2 典型电力电子瞬态模型构建与分析
选择适合的非理想开关器件(IGBT、二极管)模型搭建一种典型的电力电子瞬态模型——带阻感星形负载的三相两电平逆变电路,用于对仿真算法的实现、验证和比较。
2.1 非理想开关器件模型
绝缘栅双极型晶体管(Insulated Gate Bipolar Translator, IGBT)的模型选用文献[5]所描述的一种高压IGBT模型,该模型对IGBT的导通和关断瞬态进行了分段化处理,根据IGBT的开关特性将其开通、关断瞬态过程各分为5个阶段,从而近似得出IGBT的导通、关断电压和电流波形。在实际仿真过程中,该模型将IGBT等效为如图2所示的电路,在导通和关断的不同阶段,改变参数Rg、Cgc、RPN以及IT的表达式。
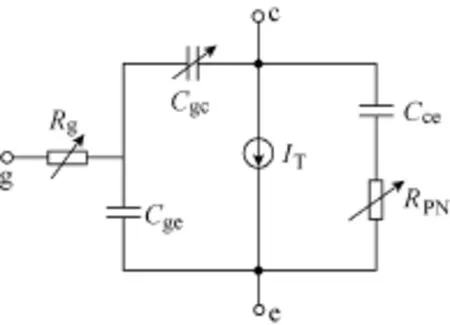
图2 IGBT模型等效电路Fig.2 The equivalent circuit of IGBT model
图2的等效电路中电流IT的表达式为
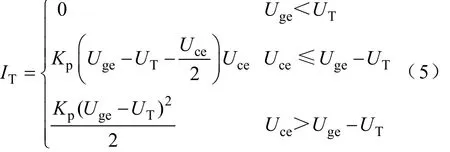
式中,UT为IGBT的阈值电压;Uce、Uge分别为IGBT的ce极间电压和ge极间电压;Kp为比例系数。
图2和式(5)中各参数值见表3。其中,Rgon、Rgoff分别为IGBT导通、关断过程中的基区电阻;Cgc1为IGBT关断第1阶段和开通第5阶段的gc极间电容,Cgc2为IGBT开通和关断的其他阶段中的gc极间电容;RPN1为IGBT开通和关断的其他阶段中基区电阻,RPN2为IGBT关断第5阶段和开通第1阶段的基区电阻。
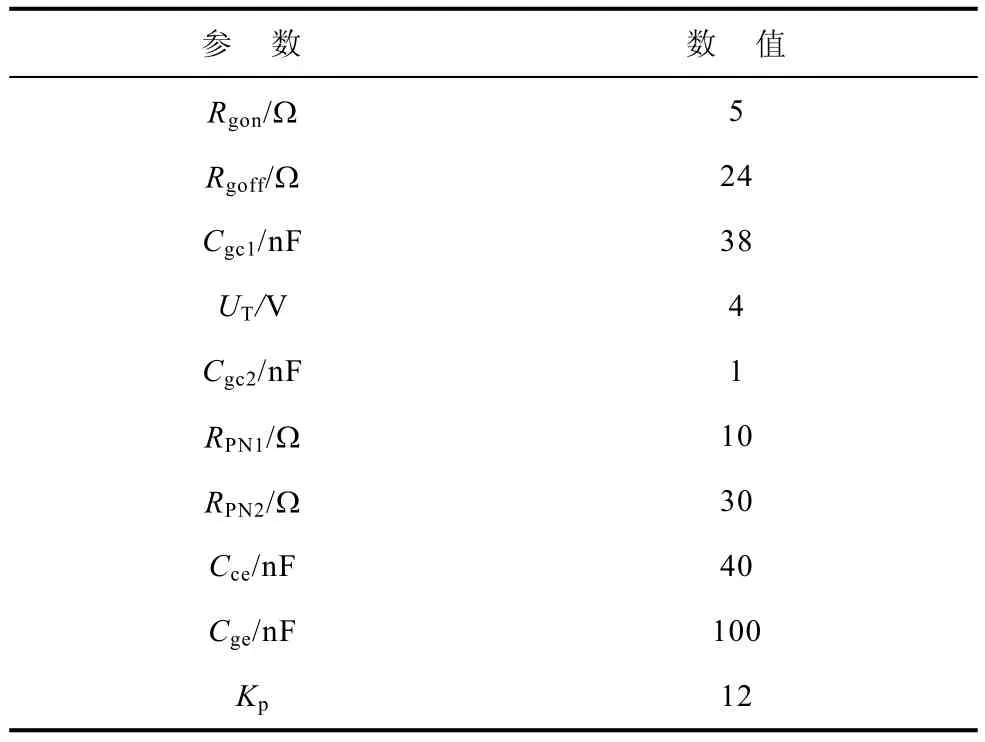
表3 IGBT模型等效电路中各参数值Tab.3 The parameters of equivalent circuit of IGBT model
二极管采用如图3所示的等效电路模型。
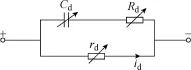
图3 二极管模型等效电路Fig.3 The equivalent circuit of diode model
二极管建模基本思路是将其等效为1个理想二极管,并联可变RC从而模拟其正、反向恢复特性[20],在图3的等效电路中则由可变电阻Rd、可变电容Cd表示,两者在二极管导通、截止瞬态时的取值分别为Rdon、Rdoff和Cdon、Cdoff。为了模型建立的方便,模拟二极管稳态时期的漏电流、管压降,将理想二极管部分用另一个可变电阻rd代替。当通过理想二极管部分的电流id>0时,二极管看作导通,rd取小电阻值rdon;当通过理想二极管部分的电流id<0时,二极管看作截止,rd取大电阻值rdoff。二极管模型等效电路中各参数值见表4。2.2 三相两电平逆变器系统模型

表4 二极管模型等效电路中各参数值Tab.4 The parameters of equivalent circuit of diode model
主仿真电路拓扑如图4所示。图中,LS1+、LS2+、LS3+、LS1-、LS2-、LS3-为母排杂散电感。为简化模型,设其值均相等,用LS表示。US为直流电压源电压,RA、RB、RC分别为三相负载电阻,LA、LB、LC分别为三相负载电感。由于负载为三相对称负载,所以三相的电阻电感值分别相等,表示为R、L。仿真中,取LS=0.8μH ,US=300V ,R=1mΩ,L=10mH。除此之外,所有IGBT及其反并联二极管的等效电路参数都相同。
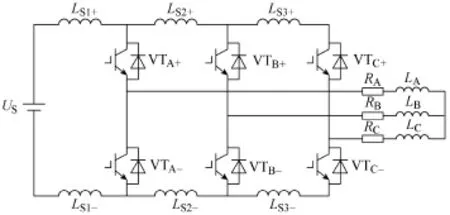
图4 主仿真电路拓扑Fig.4 Topology of main circuit for simulation
本文分析的是IGBT的开关瞬态过程,而负载电感值相对杂散参数较大,所以可认为在瞬态过程中负载电流不会改变方向。据此可以对图4的拓扑进行简化,只保留负载电流通过的换流电路。当负载电流方向如图5中所示时(A、B相电流流入桥臂,C相电流流出桥臂),换流通路为A、B相桥臂上管IGBT、下管反并联二极管以及C相桥臂上管的反并联二极管、下管IGBT。整个仿真模型如图5所示。
对图5所示拓扑进行电路分析后可以得到的系统状态方程为
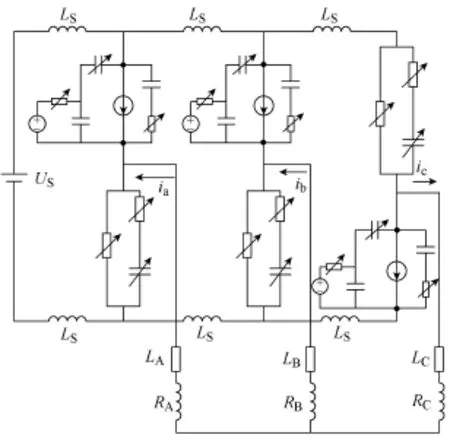
图5 简化后的仿真模型Fig.5 Simulation model after simplification

式中,x˙为17个状态变量导数组成的向量;x为17个状态变量组成的向量,状态变量选取为模型中各电容电压和电感电流;u为7个输入变量构成的向量,输入变量选取为4个电压源电压(电源电压US和图4中各IGBT栅极电压)以及图4中各IGBT的电流IT等效电流源电流;系数矩阵A17×17∈R,Β17×7∈R,两者在IGBT瞬态过程经历的各个阶段内部为常系数矩阵,跨越阶段时系数发生改变。
2.3 系统刚性分析
取2.2节所述瞬态模型在实际仿真中容易出现刚性振荡的一个瞬态阶段,即VTA+管处于关断稳态,VTB+管处于开通最后阶段,VTC+管处于开通稳态。受线路杂散电感影响,VTB+管出现短时反并联二极管续流的现象,等效于在VTB+管c、e极间并接小电阻,系统刚性大大增加。设λi为A的特征值(i=1,2,…,17),计算各λi值可知其满足关系为
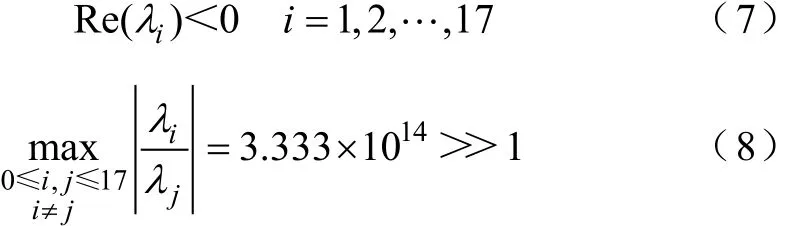
式(7)和式(8)表明,该状态下系统状态方程为刚性常微分方程[20],且会发生刚性振荡[21]。
取h为时间步长。由于电力电子开关瞬态过程时间尺度为μs级[9],为保证一定的计算准确性,h至少需要再小1个数量级,此时可忽略h的高阶成分。此情况下容易推导,对于式(6)所示常微分方程的解算,常用的三种显式方法向前Euler、PECE Euler和4阶R-K法的数值稳定性条件分别为
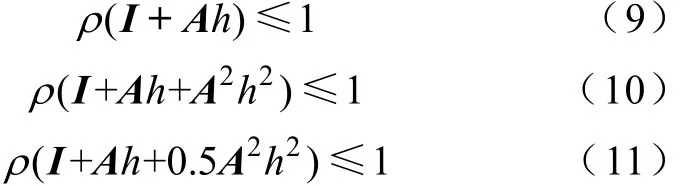
式中,I为单位矩阵;()ρ⋅为求取矩阵的谱半径函数。
进一步忽略h的高阶成分,式(10)和式(11)均可转化为式(9)。解不等式,得

按此步长,即使是解算5μs的瞬态过程也至少需要8.5×107步,在Matlab平台中使用CPU主频3.6GHz的计算机(下文仿真计算均使用此平台和计算机)运算至少需要113.4s。所以使用显式方法时,所取步长需远小于所需仿真精度,且带来过长的仿真时间。
各种隐式刚性算法的使用可以克服上述问题,然而算法复杂度大大增加,各步均存在迭代,单步计算量大,仿真速度同样难以满足要求。
下面使用引言部分介绍的Matlab中自带刚性算法对该瞬态模型进行分析。分析过程为:1个开关周期中,VTA+管处于关断稳态,VTC+管处于开通稳态,VTB+管在1个周期内,经历关断、开通两个过程,其开关周期为0.2ms,占空比为50%。表5统计比较了四种算法仿真性能,可见,相对误差设置相同时,具有二阶向后微分公式的梯形法(Trapezoidal Rule with the Second Order Backward Difference Formula, TR-BDF2)(命令为“ode23tb”)仿真速度最快,故本文将用其与DSED方法的仿真性能进行对比。
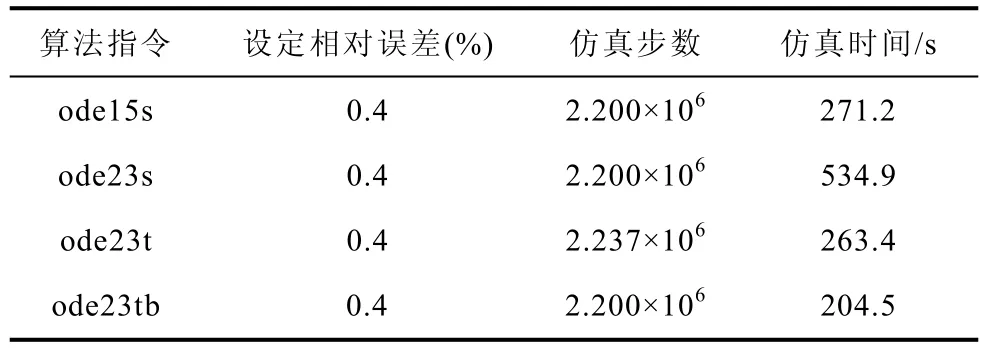
表5 电力电子瞬态仿真中各刚性算法仿真性能Tab.5 Performance of algorithms for stiff ODEs on transient simulation of power electronic converters
3 DSED方法的改进方法
3.1 DSED方法在电力电子瞬态仿真中的局限性
文献[13]指出,在使用QSS算法进行系统仿真分析时,量化长度ΔQ的选取对仿真精度和速度都有决定性影响。本文将通过算例分析研究ΔQ对DSED方法仿真性能的影响。为运算精确而稳定地进行,各状态变量的量化长度大小与其稳态下幅值须成等比例关系[18],设k为比例系数,即

取k=0.4%,用DSED方法对第2节所述的开关周期进行仿真。仿真总步数为76.06110×,用时644.5s。其中,2.3节所分析刚性最强阶段的仿真时间占用了总仿真时间的99.68%。图6分别展示了使用DSED法和相对误差为0.4%的TR-BDF2法(Matlab命令为“ode23tb”)所得此过程中VTB+管动作时的管压降和电流波形。
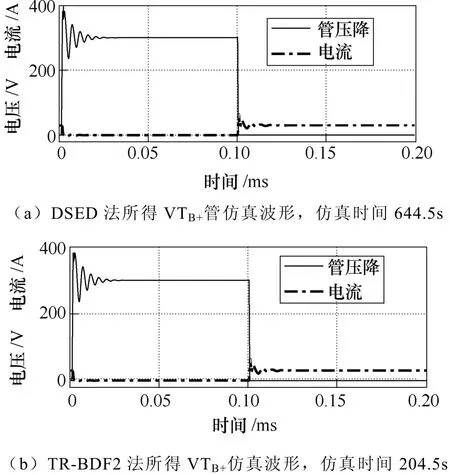
图6 使用DSED和TR-BDF2法的仿真波形Fig.6 Simulation waveforms calculated by DSED and TR-BDF2
对比图6a和图6b的仿真波形可发现,使用DSED方法会导致稳态过程中仿真波形出现幅值较大的低频数值振荡。同时,在刚性较强的区域,仿真波形会出现频率极高、幅值较小的高频数值振荡。低频振荡和高频振荡的放大波形如图7所示。
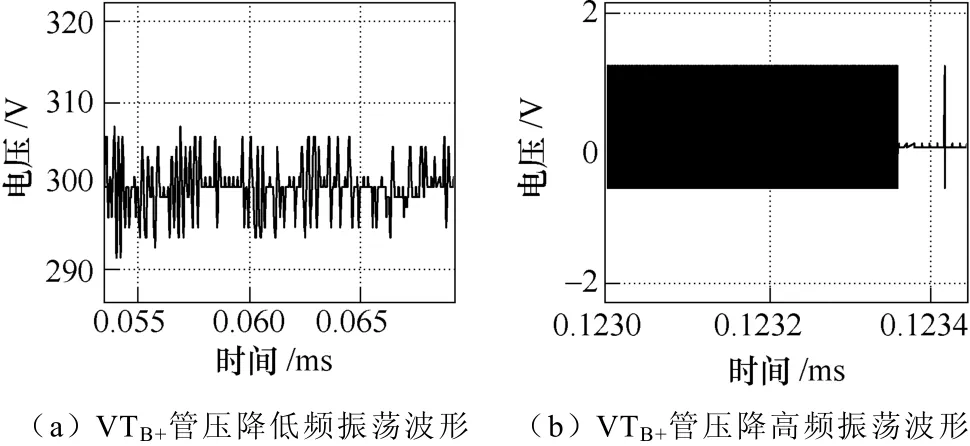
图7 使用DSED方法时的振荡放大波形Fig.7 Oscillating waveforms calculated by DESE
图7中,低频振荡虽然幅值较高,会造成仿真准确性的降低,然而其振荡频率较低,对仿真速度影响较小,在对精度要求较低的场合这种低频振荡是可以接受的。强刚性阶段的高频振荡由于其振荡频率特别高,相应会在该阶段造成极大的仿真步数和仿真时间,这便是在刚性最强阶段的仿真时间占用了总仿真时间99.68%的原因。高频振荡的存在导致DSED方法相对传统刚性算法(TR-BDF2法)不存在任何速度优势,反而在仿真精度上存在劣势。消除DSED方法仿真中的高频振荡成为其能够在电力电子瞬态仿真中取得应用的关键。
3.2 抑制高频振荡的改进DSED方法
振荡的“高频”直接来源于对应每步计算中的“高导数”。在状态变量量化长度固定的条件下,某状态变量导数绝对值过大将直接导致该步计算时间间隔过小,如果这种状态不断重复,宏观上表现为高频振荡。基于此思想可使用在每步计算中对全局限制导数幅值来抑制高频振荡。
全局限制状态变量导数幅值的原则是:在有效抑制高频振荡的同时保证不破坏计算的准确性。一般使用“尝试法”确定为抑制高频振荡所设导数绝对值上界,也可以通过估算系统“正常”导数值的范围来确定导数限幅上界。在本文分析的电力电子瞬态模型中,状态变量的导数主要来源于电感和电容元件,其估算表达式分别为

式中,i、u为状态变量,分别表示流过电感的电流和电容两端的电压;L、C分别为电感、电容值;uL、iC分别为电感两端电压和流过电容的电流。
以本文仿真系统为例,系统中包含最小电容和电感分别为1nF、0.8μH,整个系统电容电压、电感电流的稳态峰值分别约为385V、66A。由式(14)和式(15)可得电流、电压的导数最大值分别为
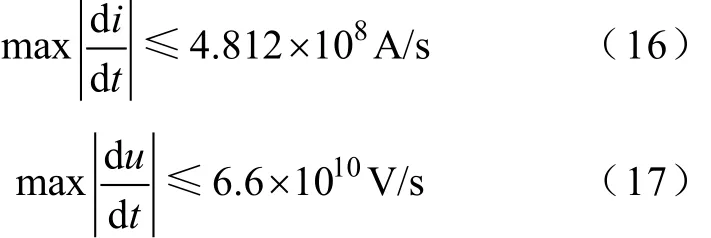
为确保导数限幅不对系统变化造成影响,取导数绝对值上界比“正常”导数的最大值还大1个数量级,即令

在DSED方法中加入式(18)所示限幅条件,则在进行2.3节所述瞬态仿真中,总仿真步数由传统DSED方法的6.061×107步缩减为5.877×105步,而仿真波形除了消除高频振荡外没有任何改变。
事实上,式(18)给出的是考虑最坏情况,同时放了一个数量级余量的理论限幅条件。利用“尝试法”在实际仿真中,只需将导数幅值上限定为1010,便可保证其不影响正常的仿真波形。这种情况下,总仿真步数进一步缩减为1.357×105步,相当于将仿真速度又提高了4倍多,仿真时间为1.354s,相对DSED方法仿真速度提高400倍。在不考虑精度的情况下相对TR-BDF2法仿真速度提升两个数量级。
3.3 抑制低频振荡幅值的改进LIDSED算法
文献[15,16]介绍了针对显式QSS方法振荡问题的隐式线性量化状态空间方法(LIQSS法),并给出LIQSS1法(1阶)相应显式算法。该算法基本思路是:由于QSS方法中,每步运算仅仅改变1个状态变量的Q函数。故在第k步计算中,首先对k-1步计算中唯一Q函数发生变化的状态变量(假定为ix)的Q函数iq以及导数ix˙进行线性化预估,即
式中,Δqi为xi的量化长度;Ai、vi(t)分别为导数预估线性方程的系数,确定方法为
接下来用预估的ix˙校正iq,再将iq以及其余状态变量Q函数代入状态方程校正ix˙。其余步骤与QSS1法相同。
这种算法由于每步运算实际上仅仅对1个状态变量进行预估校正处理,对振荡的抑制极为有限。在本文分析的仿真系统中,状态变量共17个,如果用此算法效果几乎与QSS1法没有区别。针对这个问题,本文提出一种适用于电力电子仿真,对所有状态变量进行线性化预估校正的改进LIDSED方法。仍然假定k-1步计算中唯一Q函数发生变化的状态变量为ix。任取117j≤≤,则状态变量xj的Q函数qj以及导数值jx˙的线性化预估过程改进为


其余步骤不作改变(也加入了导数限幅)。取k值同为0.4%,比较改进QSS1法和改进LIQSS1法得到的VTB+管仿真波形,如图8所示。
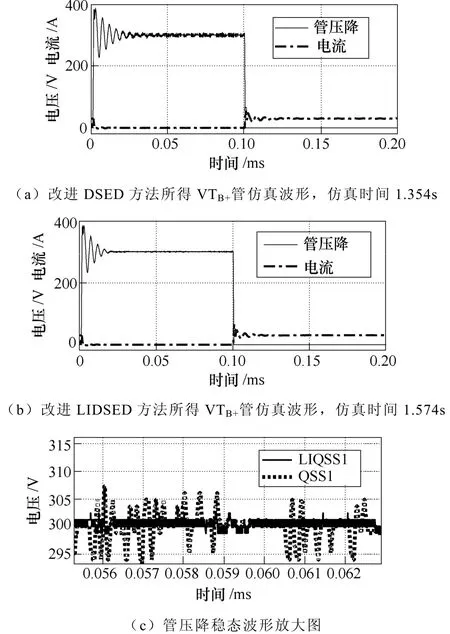
图8 同量化长度ΔQ下改进DSED方法和改进LIDSED方法的仿真波形Fig.8 Simulation waveforms calculated by modified DSED and LIDSED with same ΔQ
由图8可知,等量化长度下,使用LIDSED方法可以有效抑制低频振荡幅值,从而提升仿真的精度。此外,由于其单步计算量相对上述导数限幅的DSED方法大,所以仿真时间有轻微增加。
4 DSED方法的仿真性能分析
基于表5所示结果,在本文电力电子仿真模型和仿真阶段中使用Matlab自带刚性算法等相对误差情况下,仿真速度最快的TR-BDF2法和本文提出的改进DSED方法、改进LIDSED方法进行精度、速度性能的分析比较。
仿真速度可由仿真时间表示,仿真精度的表示方法是:改进DSED方法所得VTB+管压降数据和TR-BDF2法所得VTB+管压降数据分别进行2 000项线性插值后取两者插值结果差的方均根。如果y、ˆy分别表示QSS方法和TR-BDF2法的插值结果,则方均根误差RMSE为

改变量化长度,得到改进DSED法和改进LIDSED法仿真速度和结果的方均根误差如图9所示。
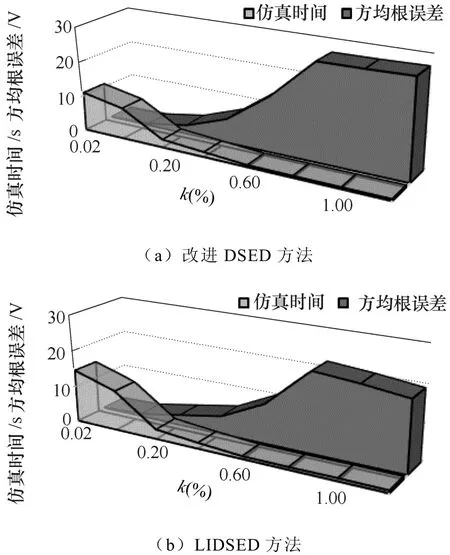
图9 改进DSED方法的仿真性能Fig.9 Simulation performance of modified DSED methods
图9中,k定义如式(13)所示,为量化长度ΔQ的大小。由图9可知,随着ΔQ的增大,改进DSED方法和LIDSED方法的仿真速度随之提升,而两者的仿真精度随之下降。当ΔQ增大到一定程度时,继续增加ΔQ,两种方法的仿真速度和精度变化将不再明显。因此,在实际仿真过程中,应根据实际对仿真速度和精度的需要进行ΔQ选取。
改进的DSED方法和LIDSED方法仿真精度和ΔQ的关系如图10所示。分析图10不难发现,在每一个相同ΔQ下,改进LIDSED方法均相对改进DSED方法具有精度优势,相对TR-BDF2法的方均根误差较改进QSS1法小,原因是其对仿真结果低频振荡幅值起到了一定抑制作用,这也验证了第3节的分析。
然而,在相同ΔQ下,改进DSED方法仿真时间略高于改进LIDSED方法,如图11所示。所以在运用中,两者的选用也需要根据实际仿真需要和在仿真模型中两种算法的速度和精度表现来作选择。
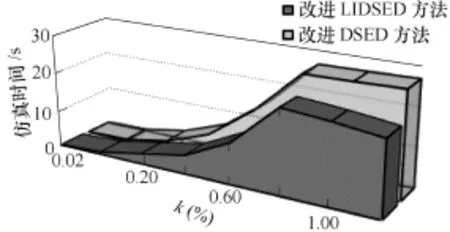
图10 改进DSED方法和LIDSED方法的仿真精度Fig.10 Simulation precision of modified DSED and LIDSED
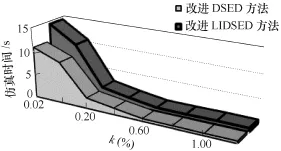
图11 改进DSED方法和LIDSED方法的仿真时间Fig.11 Simulation time of modified DSED and LIDSED
5 结论
本文将基于离散状态事件驱动(DSED)的数值仿真方法应用于电力电子系统瞬态仿真,搭建了典型的电力电子瞬态仿真系统——考虑非理想开关器件和线路杂散参数的三相两电平逆变电路。以此为分析对象,实现了DSED方法在电力电子瞬态仿真中的运用,并根据文献[13-19]所提出的QSS方法的局限性和仿真需要,提出了两种改进的DSED方法——改进DSED方法和改进LIDSED方法。并以第2节仿真系统为算例,分析了两者的仿真性能,相互比较并与Matlab自带刚性算法进行对比。得到如下结论:
1)电力电子瞬态仿真系统(以本文使用系统为例)具有刚性强、不连续点多等特点,传统时间离散算法存在速度慢、收敛性差的特点。
2)在Matlab平台实现了使用DSED方法代替传统时间离散方法进行电力电子系统瞬态仿真。
3)针对DSED方法中高频振荡问题,基于DSED方法提出基于导数限幅的改进DSED方法,有效抑制高频振荡,相对传统时间离散刚性算法将仿真速度提升两个数量级。
4)针对改进DSED方法存在较大幅值低频振荡现象,基于LIQSS1方法提出改进LIDSED方法,相对改进DSED方法能有效削弱低频振荡幅值,提高仿真精度。
5)改进DSED方法和LIDSED方法的仿真速度随量化长度ΔQ增加而升高,仿真精度随量化长度ΔQ增加而降低,且两者的变化趋势在ΔQ增加到一定程度时均呈现“饱和”特征。
6)尽管ΔQ相同时改进LIDSED方法仿真精度高于改进DSED方法,然而其仿真速度却相对较慢。具体使用时需根据实际情况选择适合的算法。
通过算法比较和算例分析,总结DSED仿真方法有待解决的问题和进一步发展方向。
1)DSED方法进行电力电子系统仿真时,需要列写电路状态方程。为提升算法实用性,需要在DSED方法中加入自动识别电力电子系统开关过程以及根据电路拓扑和所处状态自动列写状态方程的相关算法。
2)改进DSED方法中,导数限幅过程依赖于模型的特性(电感、电容和状态变量峰值)。如需进一步提升算法性能,需要找到自适应的导数限幅方式或开发隐式DSED方法。
[1] 鲁挺. 大容量电力电子系统非理想功率脉冲特性及其控制方法[D]. 北京: 清华大学, 2010.
[2] 赵争鸣, 贺凡波, 袁立强, 等. 大容量电力电子系统电磁瞬态分析技术及应用[J]. 中国电机工程学报, 2014, 34(18): 3013-3019. Zhao Zhengming, He Fanbo, Yuan Liqiang, et al. Techniques and applications of electromagnetic transient analysis in high power electronic systems[J]. Proceedings of the CSEE, 2014, 34(18): 3013-3019.
[3] Ji S, Lu T, Zhao Z, et al. Modelling of high voltage IGBT with easy parameter extraction[C]//IEEE Power Electronics and Motion Control Conference, Harbin, China, 2012: 1511-1515.
[4] Ji S, Zhao Z, Yuan L. HVIGBT physical model analysis during transient[J]. IEEE Transactions on Power Electronics, 2013, 28(5): 2616-2624.
[5] 刘军锋, 李叶松. 死区对电压型逆变器输出误差的影响及其补偿[J]. 电工技术学报, 2007, 22(5):117-122. Liu Junfeng, Li Yesong. Dead-time influence on output error of voltage source inverter and compensation[J]. Transactions of China Electrotechnical Society, 2007, 22(5): 117-122.
[6] 白华, 赵争鸣, 张永昌, 等. 最小脉宽特性对高压三电平变频器的影响[J]. 电工技术学报, 2006, 21(12): 60-65. Bai Hua, Zhao Zhengming, Zhang Yongchang, et al. Effect of minimum pulse width on high voltage three-level inverters[J]. Transactions of China Electrotechnical Society, 2006, 21(12): 60-65.
[7] 李锃. 大功率多电平逆变器寄生参数对电路性能影响和抑制的分析与研究[D]. 杭州: 浙江大学, 2008.
[8] 于华龙, 赵争鸣, 袁立强, 等. 高压IGBT串联变换器直流母排设计与杂散参数分析[J]. 清华大学学报: 自然科学版, 2014, 54(4): 540-545. Yu Hualong, Zhao Zhengming, Yuan Liqiang, et al. High-voltage IGBTs series converter bus bar design and stray parameter analysis[J]. Journal of Tsinghua University: Science and Technology, 2014, 54(4):540-545.
[9] 赵争鸣, 白华, 袁立强. 电力电子学中的脉冲功率瞬态过程及其序列[J]. 中国科学: 技术科学, 2007, 37(1): 60-69. Zhao Zhengming, Bai Hua, Yuan Liqiang. Transient process and sequence of power pulse in power electronics[J]. Science China Technological Sciences, 2007, 37(1): 60-69.
[10] 陈建业. 电力电子电路的计算机仿真[M]. 北京:清华大学出版社, 2008.
[11] Hairer E, Wanner G. Solving ordinary differential equations II: stiff and differential-algebraic problems[J]. Springer Series in Computational Mathematics, 1996, 8(3): 611-614.
[12] Shampine L F, Reichelt M W. The MATLAB ODE Suite[J]. Siam Journal on Scientific Computing, 1997, 18(1): 1-22.
[13] Cellier F E, Kofman E. Continuous system simulation[M]. New York, US: Springer, 2010.
[14] Migoni G, Kofman E, Cellier F. Quantization-based new integration methods for stiff ordinary differential equations[J]. Simulation Modelling Practice & Theory, 2012, 35(4): 387-407.
[15] Migoni, Kofman G E. Linearly implicit discrete event methods for stiff ODE's[J]. Latin American Applied Research Pesquisa Aplicada Latino Americana Investigación Aplicada Latinoamericana, 2009, 39(39): 245-254.
[16] Migoni G, Bortolotto M, Kofman E, et al. Linearly implicit quantization-based integration methods for stiff ordinary differential equations[J]. Simulation Modelling Practice & Theory, 2013, 35(6): 118-136.
[17] Migoni G, Kofman E, Bergero F, et al. Quantizationbased simulation of switched mode power supplies[J]. Simulation Transactions of the Society for Modeling & Simulation International, 2015, 91(4): 320-336.
[18] Song X, Ma Y, Zhang W, et al. Quantized state based simulation of time invariant and time varying continuous systems[J]. Mathematical Problems in Engineering, 2015, 2015: 1-5.
[19] 袁立强, 赵争鸣, 宋高升, 等. 电力半导体器件原理与应用[M]. 北京: 机械工业出版社, 2011.
[20] Brenan K E, Campbell S L, Petzold L R. Numerical solution of initial-value problems in differentialalgebraic equations[M]. New York: North-Holland, 1989.
[21] 费景高. 微分代数方程的一类并行算法[J]. 计算机工程与科学, 1992, 14(4): 55-68. Fei Jinggao. A class of parallel algorithms for differential algebraic equations[J]. Computer Engineering & Science, 1992, 14(4): 55-68.
(编辑 陈 诚)
Discrete State Event Driven Based Methods for Transient Simulation of Power Electronic Converters
Tan Tian Zhao Zhengming Li Boyang Lin Yatao Chen Kainan
(State Key Laboratory of Control and Simulation of Power Systems and Generation Equipments Department of Electrical Engineering Tsinghua University Beijing 100084 China)
In order to calculate electromagnetic transients of power electronic systems, non-ideal physical models considering stray parameters of circuits and time delay of control loops are needed for semiconductor switching device. In this case, the mathematical models describing power electronic system exhibit high-order nonlinearity and tend to be highly rigid. The numerical solution methods through the conventional differential equations shall bring about the problems of long simulation time and poor numerical stability. Thus, this paper puts forward the improved methods for transient simulation of power electronic converters based on discrete state event driven (DSED) methods. These methods use the variation of state variable as the calculation basis rather than the variation of simulation time. It is demonstrated the methods could reduce simulation time effectively and solve the stiff problem of ordinary differential equations, which ensure numerically stable of the simulation.
Transient simulation of power electronic converters, discrete state event driven, simulating calculation
TM46
檀 添 男,1995年生,博士研究生,研究方向为事件驱动的电力电子仿真方法。
E-mail: tantiantsinghua@sina.cn
赵争鸣 男,1959年生,教授,博士生导师,研究方向为大容量电力电子变换系统、光伏发电、电机控制、无线电能传输等。
E-mail: zhaozm@tsinghua.edu.cn(通信作者)
10.19595/j.cnki.1000-6753.tces.170341
国家自然科学基金重大项目资助(51490680,51490683)。
2017-02-06 改稿日期 2017-03-29
