具有网络时延的直线开关磁阻电机位置跟踪控制
2017-07-18胡松钰潘剑飞
胡松钰,吴 伟,钱 松,潘剑飞,邱 丽
深圳大学机电与控制工程学院,广东深圳 518060

【电子与信息科学 / Electronic and Information Science】
具有网络时延的直线开关磁阻电机位置跟踪控制
胡松钰,吴 伟,钱 松,潘剑飞,邱 丽
深圳大学机电与控制工程学院,广东深圳 518060
针对直线开关磁阻电机网络化运行诱导时延及位置跟踪控制等问题,结合系统在线辨识获得电机模型,将网络化直线开关磁阻电机运动控制系统建模为马尔可夫时延系统.提出具有反馈通道时延的网络化直线开关磁阻电机位置跟踪控制方法,利用Lyapunov稳定性定理和线性矩阵不等式技术得到系统稳定的充分条件,给出状态反馈控制器设计.选取4组不同频率和幅值的正弦参考信号进行实验验证,证实该方法是有效可行的.
系统辨识;网络化控制系统;网络诱导时延;直线开关磁阻电机;李雅普诺夫方法;位置跟踪控制器
直线开关磁阻电机由直线电机和开关磁阻电机相结合衍生而来,具有可靠性高、响应速度快及抗震性好等特点,在国防科技和现代工业领域具有良好的应用前景[1-2].随着科技进步和生产的复杂化,控制系统与网络技术相结合,产生了网络控制系统(networked control system,NCS)[3].NCS具有资源共享、成本低等优点,被广泛用于现代工业和远程医疗等领域[4-6].然而,由于信息需要通过通信网络分时发送,NCS会在控制回路中产生时间延迟,从而降低系统的控制性能,甚至可能引起系统不稳定[7-9].因此,时延成了NCS中的一个研究重点.
在NCS控制方面,邱丽等[10]针对随机时延和丢包等问题,研究统一建模及动态输出反馈控制方法.Li等[11]提出了基于模糊观测的非线性不确定NCS的控制器设计.王燕锋等[12]在马尔科夫链转移概率矩阵中的元素是部分未知的条件下,研究了NCS的状态反馈控制问题.在直线开关磁阻电机运动控制方面,Cao等[13]研究了互补与模块化线性磁通开关电机速度控制方法.Pan等[14]采用在线自适应控制策略估计系统参数变化,采用比例积分微分(proportional integral differensial,PID)参数调节方法研究直线开关磁阻电机的位置控制.Zhang等[2]研究了多直线开关磁阻电机的协同定位控制问题.Qiu等[15]研究了网络化双直线开关磁阻电机运动控制系统的协同跟踪控制.但以上研究都很少考虑直线开关磁阻电机NCS中的时延问题.本研究以直线开关磁阻电机为被控对象,结合其在线辨识所得模型,建立网络化直线开关磁阻电机运动控制系统数学模型.针对系统中存在的随机时延等问题,提出具有反馈通道时延的网络化直线开关磁阻电机位置跟踪控制方法.利用Lyapunov稳定性定理与线性矩阵不等式技术得到系统随机稳定的充分条件,给出状态反馈控制器的设计,并通过实验验证了该方法的正确有效.
1 电机模型分析
直线开关磁阻电机利用动子、定子的相对位置信号及参考输入位置信号控制A、B和 C三组线圈中的电流,即可产生直线运动.直线开关磁阻电机如图1.

图1 电机实物图Fig.1 Physical diagram with linear switched reluctance motor
直线开关磁阻电机的电路方程、电磁方程和动力学方程[16]分别为
(1)
(2)
(3)
其中,k=a,b,c分别为电机3相中的一相;Uk为相电压;Rk为相电阻;ik为相电流;ψk为相磁链;s为位移;Fk为相电磁牵引力;y为电机的齿宽与槽宽之和;Lmax为动定子在不同相对位置的最大电感值;Lmin动定子在不同相对位置的最小电感值;F为电机的牵引力;m为动子的质量;D为电机运行的速度阻力系数;f为负载阻力.
2 网络化直线开关磁阻电机运动控制系统建模
为实现直线开关磁阻电机的控制,将实时通信网引入电机的控制系统.具有时延的网络化直线开关磁阻电机运动控制系统的基本结构如图2,假定传感器是时间驱动的,控制器和执行器是事件驱动.
该控制系统的被控对象为直线开关磁阻电机,考虑如下离散系统:

(4)
其中,x(k)∈Rn是系统的状态向量;u(k)∈Rm是系统的控制输入;A和B分别是具有适当维数的常数矩阵;φ(0)为系统的初始值;k为离散时间;k(0)为零时刻;d为时延步长.
由图2可知,传感器将被控对象的状态信息由反馈回路传送给控制器,则时延后的状态向量为

(5)
其中,d(k)为传感器与控制器之间的时延.
待设计的状态反馈控制器为
(6)
其中,K为控制器增益.
将式(5)代入式(6),得
u(k)=Kx(k-d(k))
(7)
结合式(4)和式(7),可得闭环系统为
(8)
如图2,传感器与控制器之间的时延用d(k)表示,假设时延d(k)是有界的,满足
0≤mind(k)≤d(k)≤maxd(k)
(9)

(10)
其中, Pr{d(0)=i}=λi≥0, 且λij≥0是从时间k的模态i到时间k+1的模态j的转移概率,d(0)为零时刻.
(11)
3 稳定性分析
(12)

【证】通过扩展文献[17]中的Lyapunov函数,构造Lyapunov候选函数
V(k)=V1(k)+V2(k)+V3(k)
(13)

ΔV1=E{ω(k)T[ABK0]T·

x(k)TPix(k)
(14)
其中,E[·]为数学期望.
结合式(11),得



(15)
(16)
(17)

(18)
(19)
结合式(15)至式(19),则
ΔV2≤x(k)TM1x(k)-x(k-d(k))TM1x(k-d(k))+
(20)
(21)
由Jensen不等式可得


(x(k)-x(k-d(k)))TM2(x(k)-x(k-d(k)))+
电连续性:每个保护单元PCCPL之间进行电连续跨接,保证预应力钢丝和钢筒之间阴极保护电流的连续性,每个保护单元内有排气井、泄水井、检修井构筑物时,在管件两端进行电连续跨接,阳极电缆与带状锌极采用铝热焊接方式进行连接。

(22)
因此

(23)

(24)
由Schur补引理知,要使Φi<0成立,应有
E[ΔV]≤ -σmin(-Φi)ω(k)Tω(k)≤
-βx(k)Tx(k)
(25)
其中,β=inf{σmin(-Φi,i∈S)},σmin(-Φi)为-Φi的最小特征根.由式(25)知,对任意的N≥1, 有
E[V(k+1)]-E[V(0)]≤
(26)
对任意的N>1有
(27)
以N→∞为极限,可知

(28)
由文献[18]定义1可知,系统(8)是随机稳定的.因此定理1得证.
4 控制器设计

(29)
PjXj=I
(30)
M2U=I
(31)
定理2中的线性矩阵不等式(29)与不等式约束(30)和(31)的解可转化为以下线性不等式(linearmatrixinequalities,LMI)约束的最小化问题.
(32)
其中,tr(·)为矩阵的迹.利用锥补线性化算法求解上述非线性最小化问题,
5 实验结果
以直线开关磁阻电机为被控对象,搭建网络化直线开关磁阻电机运动控制系统的实验平台,以验证方法的正确性和有效性.由直线开关磁阻电机的动力学方程式(3),忽略负载影响,则直线开关磁阻电机可进一步表示为离散时间形式
A(z-1)s=B(z-1)F
(33)
其中,A(z-1)=1+a1z-1+a2z-2;B(z-1)=b1z-2+b2z-1;A和B为系统矩阵,系统采用文献[16]的在线辨识方法,可获得电机模型的参数为a1=-1.825 0;a2=0.824 3;b1=0.004 4;b2=0.004 7.
模型参数的微小变化可由不同的识别参考信号引起.然而,识别参数的正负不会随着参考信号的改变而改变.


由定理2可求出位置跟踪控制器的增益K=[-0.226 6 1.180 6].

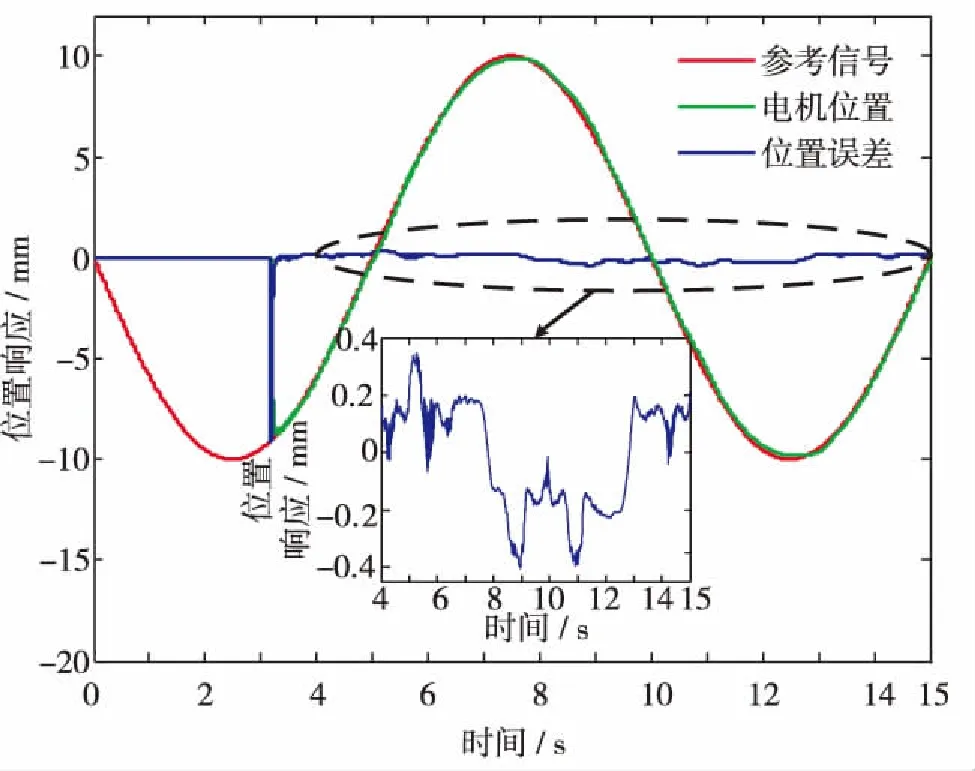
图3 幅值为10 mm、频率为0.1 Hz的正弦参考信号Fig.3 Response profiles at 10 mm and 0.1 Hz under sinusoidal reference
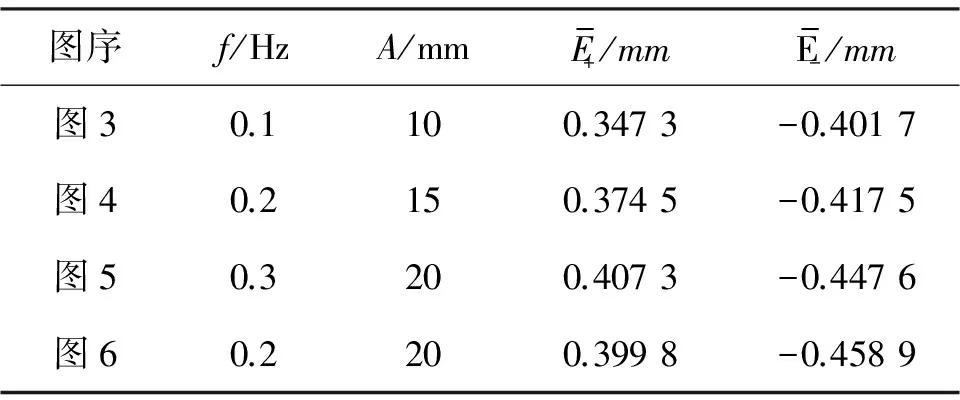
图序f/HzA/mmE-+/mmE--/mm图30.1100.3473-0.4017图40.2150.3745-0.4175图50.3200.4073-0.4476图60.2200.3998-0.4589

图4 幅值为15 mm、频率为0.2 Hz的正弦参考信号Fig.4 Response profiles at 15 mm and 0.2 Hz under sinusoidal reference

图5 幅值为20 mm、频率为0.3 Hz的正弦参考信号Fig.5 Response profiles at 20 mm and 0.3 Hz under sinusoidal reference

图6 幅值为20 mm、频率为0.2 Hz的正弦参考信号Fig.6 Response profiles at 20 mm and 0.2 Hz under sinusoidal reference
本研究考虑最大时延为3 s.对比在不同幅值和频率的正弦参考输入信号下,状态反馈控制器的位置跟踪控制效果.由图3和图4可知,电机的最大绝对位置误差分别为0.401 7和0.417 5 mm,说明当参考输入信号的幅值和频率都不相同时,设计的状态反馈控制器具有良好的位置跟踪控制效果.由图5和图6可知,电机的最大绝对位置误差分别为0.447 6和0.458 9 mm,说明当参考输入信号的幅值相同但频率不同时,设计的状态反馈控制器仍具有良好的位置跟踪控制效果.由图4和图6可知,当参考输入信号的频率相同但幅值不同时,设计的状态反馈控制器仍具有良好的位置跟踪控制效果.综上所述,本研究设计的状态反馈控制器能较好地实现电机的位置跟踪控制.
结 语
本研究针对直线开关磁阻电机网络化运行诱导时延及位置跟踪控制等问题,结合系统在线辨识获得电机模型,将网络化直线开关磁阻电机运动控制系统建模为马尔可夫时延系统,提出具有反馈通道时延的网络化直线开关磁阻电机位置跟踪控制方法.利用Lyapunov稳定性定理和线性矩阵不等式技术得到系统稳定的充分条件,给出状态反馈控制器的设计.选取不同频率和幅值的正弦参考信号进行实验研究,由实验结果可知本设计的状态反馈控制器有效可行.针对网络化直线开关磁阻电机的运动控制问题,本研究重点研究了系统中的随机时延问题,未来将进一步研究数据包丢失、系统模型不确定性等因素下的控制方法.
/ References:
[1] Dong Hongli, Wang Zidong, Gao Huijun. Robust H1 filtering for a class of nonlinear networked systems with multiple stochastic communication delays and packet dropouts[J], IEEE Transactions on Signal Processing, 2010, 58(4): 1957-1966.
[2] Zhang Bo, Yuan Jianping, Qiu Li, et al. Distributed coordinated motion tracking of the linear switched reluctance machine-based group control system[J]. IEEE Transactions on Industrial Electronics, 2016, 63(3): 1480-1489.
[3] 邱 丽.基于Markov跳变理论的网络控制系统研究[D].广州:华南理工大学,2011. Qiu Li. Study of networked control systems based on markov jump theory[D]. Guangzhou: South China University of Technology, 2011.(in Chinese)
[4] 李洪波,邓建球,孙增圻,等.网络控制系统的时延相关状态反馈控制器设计[J].控制理论与应用,2012,29(10):1325-1330. Li Hongbo, Deng Jianqiu, Sun Zengqi, et al. Delay-dependent state feedback controller design for a class of networked control systems[J]. Control Theory and Applications, 2012, 29(10): 1325-1330.(in Chinese)
[5] 刘于之,李木国,杜 海.网络化控制系统鲁棒H∞保性能控制研究[J].大连理工大学学报,2014,54(1):131-138.LiuYuzhi,LiMuguo,DuHai.ResearchonrobustH∞guaranteedcostcontrolfornetworkedcontrolsystems[J].JournalofDalianUniversityofTechnology, 2014, 54(1): 131-138.(inChinese)
[6]SuzukiT,KonoM,TakhashiN,etal.Controllabilityandstabilizabilityofanetworkedcontrolsystemwithperiodiccommunicationconstraints[J].SystemandControlLetter, 2011, 60(12): 977-984.
[7] 李 欣,李若琼,董海鹰.不确定时延NCS的输出反馈鲁棒H∞保性能控制[J].控制工程,2016,23(7):1045-1052.LiXin,LiRuoqiong,DongHaiying.RobustH∞guaranteedcostcontrolforoutputfeedbacknetworkcontrolsystemwithuncertaintime-delay[J].ControlEngineeringofChina, 2016, 23(7): 1045-1052.(inChinese)
[8] 王新伟,张 颖,戎玉密.改进Lyapunov泛函变是指系统稳定性分析[J].深圳大学学报理工版,2017,34(2):181-187.WangXinwei,ZhangYing,RongYumi.Stabilityanalysisoftime-varyingdelaysystembasedonanimprovedLyapunovfunction[J].JournalofShenzhenUniversityScienceandEngineering, 2017, 34(2): 181-187.(inChinese)
[9]VanDWN,NaghshtabriziP,CloostermanM,etal.Trackingcontrolforsampled-datasystemswithuncertainsamplingintervalsanddelays[J].InternationalJournalRobustNonlinearControl, 2010, 20(4): 387-411.
[10] 邱 丽,姚凤麒,钟小品,等.随机丢包时延网络控制系统动态输出反馈控制[J].深圳大学学报理工版,2015,32(1):40-47.QiuLi,YaoFengqi,ZhongXiaopin,etal.Dynamicoutputfeedbackcontrolofnetworkedcontrolsystemswithrandompacketdropoutsandtimedelays[J].JournalofShenzhenUniversityScienceandEngineering, 2015, 32(1): 40-47.(inChinese)
[11]LiHongyi,WuChengwei,YinShen,etal.Observer-basedfuzzycontrolfornonlinearnetworkedsystemsunderunmeasurablepremisevariables[J].IEEETransactionsonFuzzySystems, 2016, 24(5): 1233-1245.
[12] 王燕锋,王培良,陈惠英,等.转移概率部分未知的网络控制系统状态反馈[J].控制工程,2015,22(4):776-779.WangYanfeng,WangPeiliang,ChenHuiying,etal.Statefeedbackfornetworkedcontrolsystemswithpartlyunknowntransitionprobabilities[J].ControlEngineeringofChina, 2015, 22(4): 776-779.(inChinese)
[13]CaoRuiwu,ChengMing,ZhangBangfu.Speedcontrolofcomplementaryandmodularlinearflux-switchingpermanent-magnetmotor[J].IEEETransactionsonIndustrialElectronics, 2015, 62(7): 4056-4064.
[14]PanJianfei,ZouYu,CaoGuangzhong.Adaptivecontrollerforthedouble-sidelinearswitchedreluctancemotorbasedonthenonlinearinductancemodelling[J].IETElectricPowerApplication, 2013, 7(1): 1-15.
[15]QiuLi,ShiYang,PanJianfei,etal.Collaborativetrackingcontrolofduallinearswitchedreluctancemachinesovercommunicationnetworkwithtimedelays[J].IEEETransactionsonCybernetics,2016,PP(99):1-11.
[16] 何晓东,刘贤兴.直线开关磁阻电机的结构设计与控制[J].微电机,2005,38(3):37-39.HeXiaodong,LiuXianxing.Analysisofstructuredesigncontrolofalinearswitchedreluctancemotor[J].Micro-motor, 2005, 38(3): 37-39.(inChinese)
[17]QiuLi,ZhangBo,XuGang,etal.MixedH2/H∞controlofmarkovianjumptime-delaysystemswithuncertaintransitionprobabilities[J].InformationSciences, 2016, 373: 539-556.
[18]ShiYang,HuangJi,YuBo.Robusttrackingcontrolofnetworkedcontrolsystems:applicationtoanetworkedDCmotor[J].IEEETransactionsonIndustrialElectronics, 2013, 60(12): 5864-5874.
[19]QiuLi,ShiYang,PanJianfei,etal.NetworkedH∞controllerdesignforadirect-drivelinearmotioncontrolsystem[J].IEEETransactionsonIndustrialElectronics, 2016, 63(10): 6281-6291.
【中文责编:英 子;英文责编:子 兰】
2017-01-20;Accepted:2017-02-11
Associate professor Qiu Li.E-mail:qiuli@szu.edu.cn
Positioning control for linear switched reluctance motor with network-induced time delays
Hu Songyu, Wu Wei, Qian Song, Pan Jianfei, and Qiu Li
College of Mechatronics and Control Engineering,Shenzhen University,Shenzhen 518060,Guangdong Province, P.R.China
This paper addresses the positioning control for the networked linear switched reluctance motor (LSRM) with network-induced sensor-to-controller time delays. The motor parameters are obtained by online system identification method. The LSRM over communication network is modeled as a Markov time-delay system. The stability conditions and the positioning controller design method for the LSRM are obtained by using Lyapunov theory and inequality technique. Experiments are conducted using four sinusoidal reference signals to verify the effectiveness of the proposed positioning control method for the networked LSRM.
system identification; networked control systems; network-induced time delays; linear switched reluctance motor; Lyapunov method; positioning controller
:Hu Songyu, Wu Wei, Qian Song, et al. Positioning control for linear switched reluctance motor with network-induced time delays[J]. Journal of Shenzhen University Science and Engineering, 2017, 34(4): 434-440.(in Chinese)
TP 273
A
10.3724/SP.J.1249.2017.04434
国家自然科学基金资助项目(61403258);深圳大学青年教师科研启动资助项目(201443)
胡松钰(1984—),男,深圳大学讲师、博士.研究方向:机器人、运动控制.E-mail: songyu166@szu.edu.cn
Foundation:National Natural Science Foundation of China(61403258);Scientific Research Foundation for Young Teachers of Shenzhen University(201443)
引 文:胡松钰,吴 伟,钱 松,等.具有网络时延的直线开关磁阻电机位置跟踪控制[J]. 深圳大学学报理工版,2017,34(4):434-440.
