长航程无人艇的导航-制导-控制系统
2017-07-12白一鸣
白一鸣
长航程无人艇的导航-制导-控制系统
白一鸣
长航程无人艇是进行远距离海洋环境监测、目标探测的有效工具。高效能的导航-制导-控制系统是无人艇提升续航能力的基础与前提。本项目围绕长航程无人艇的导航-制导-控制系统展开介绍,重点阐述导航、制导、控制三个子系统功能的实现方法以及现有方法在节约能耗方面的不足。最后针对长航程无人艇导航-制导-控制系统的总体架构提出展望,以期达到提升无人艇的整体续航能力与平衡无人艇航行安全与能量消耗的目标。
长航程;无人艇;导航;制导;控制系统
一、长航程无人艇导航-制导-控制系统的研究意义
地球表面大约三分之二被海洋覆盖,但大多数区域并未被完全开发利用。[1]海洋蕴藏着丰富的矿物质资源、海洋生物资源和能源,是各国经济可持续发展的重要财富。十八大报告中明确强调“提高海洋资源开发能力,发展海洋经济,保护海洋生态环境,坚决维护国家海洋权益,建设海洋强国”。因此,大力发展海洋装备,提高对海洋的控制能力和开发能力,在对国民经济的推动和国家空间安全的防护方面具有十分重要的战略意义。
随着气候变化加剧,环境异常情况增多,发展新型无人艇在科学研究、商业及军事领域的需求强烈。[2]无人艇作为无人的水面航行器正逐渐成为舰艇平台的补充或替代品,可以较低成本完成海上大范围、长时间的科学考察与工程任务,如海域搜救、导航和水文地理勘察,水文信息监测、海洋气象预报,水下生物研究,海洋资源勘探以及区域海图的绘制,近海地带防御,特定海域的侦察、搜索、探测和排雷,反潜作战、反特种作战以及打击海盗、反恐攻击等。[3]无人水面艇在民用和军事领域具有极其广泛的应用前景。
近年来,面向大范围、长期化的海洋环境监测、目标探测的背景需求,通过优化无人艇的导航-制导-控制系统以利用环境影响降低能耗,达到提升无人艇续航能力的目标是国外无人艇研究的热点,但国内的研究仍停留在理论阶段,鲜有实船研究成果。在美国海军发布的《海军水面无人艇主计划》中对于这一技术领域的需求是,“进一步提高区域覆盖率,提高对水面目标的检测、分类和识别的能力以及跟踪技术”。美国正在研制与调试可以超长时间持续工作的长航程反潜无人艇(AOTUV),目的是持续跟踪静音潜艇。英国在2014年着手研发“C-Enduro”系列长航时无人水面艇,并通过制定高效的避碰策略与路径规划算法,以保障无人艇有尽可能长的续航能力。[5-6]以色列在无人艇领域的发展也不容小觑。由于曾经遭受海上的恐怖袭击,以色列对海上防御设置了重重关卡,无人艇负责在距岸20~30海里内持续巡航,进行无线电检查和识别。[7]
因此,为应对复杂严酷的海洋环境,提升无人艇的续航能力,基于艇载低功耗、小规模导航设备及传感器,研究导航信息与海洋环境信息融合技术,以实现对海洋环境的有效感知,研究自主航迹规划、避碰与航迹跟踪控制技术,以实现无人艇航行的自主决策与控制系统设计等关键技术,对优化无人艇导航-制导-控制核心系统性能,提升无人艇续航能力,具有十分重要的意义。
二、长航程无人艇导航-制导-控制系统的研究现状
导航-制导-控制系统(Navigation-Guidance-Control System)是长航程无人艇进行自主航行的核心,直接影响无人艇的能量消耗与续航能力[8-10],其总体结构如图1所示。

图1 长航程无人艇导航-制导-控制系统的总体结构
导航子系统(Navigation Subsystem)的核心目标是辨识无人艇当前航行状态(包括位置、航向、速度、加速度等),利用船载传感器检测环境信息(包括洋流、风速等)感知周边环境。该系统的主要功能是进行无人艇的碰撞风险评价。
制导子系统(Guidance Subsystem)根据导航系统信息、任务需求以及环境状态,持续生成平滑、可行的最优航行路径,并将该参考航迹发送给控制系统。该系统的主要功能是进行无人艇的路径规划。
控制子系统(Control Subsystem)关注的重点是与导航、引航子系统配合在恰当的时间点生成合适的控制量,以达到期望的控制效果。该系统的主要功能是进行无人艇的操纵运动控制与决策。
导航、制导、控制三个子系统之间相互作用,单一子系统的不完善,将直接影响长航程无人艇的整体能耗效率。[11]如何架构一个科学、合理的系统模型,并充分体现出“导航-引航-控制”子系统间的共生关系一直是长航程无人艇的研究重点和难点。
1.导航:碰撞风险评估
长航程无人艇在进行远距离航行时,需要在不同天气和海况下执行多种任务。准确的碰撞风险评价不仅能够确保无人艇长距离航行中的安全,也是无人艇后续进行高效率航行、提升续航能力的前提与基础。根据研究侧重点不同,一般将无人艇的碰撞风险评估分为宏观和微观评估两类。
宏观碰撞风险评估的主要思路是以历史事故的相关数据、交通流数据以及水文气象数据等为基础,并采用专家问卷调查等方式获取定性知识,对一个较大范围水域的通航安全形势进行整体评价。这方面的研究根据历史事故数据来预测未来交通事故的发展趋势,分析碰撞事故的发生时间、地点、事故原因等基本规律。[12-13]目前,客观数据的不充足是面临的一个普遍问题,往往需要一些定性的数据作为补充,主客观数据融合是目前最为常用的方法之一。然而现有的主客观数据融合方法在事故因素的选取、变量的构造中往往带有一定主观性,不能完全反映事故发生的根本原因,易忽略重要因素,因此评估结果的可信度较低。另外,大多数主客观数据融合方法没有将来自不同领域专家的数据进行区别对待,造成标准不统一,评价结果的精度和可靠性往往无法得到保证。
微观碰撞风险评估则主要从单船或者是多船会遇局面下的碰撞事故角度展开研究,其中最为典型的是船舶领域理论,其主要思想是通过为本船设定一个有一定尺寸的区域来量化本船与周围船舶的碰撞风险。近年来,领域模型一直是船舶安全领域的研究热点。20世纪80年代的Fujii的主观模型[14]和Goodwin的客观模型[15]都采用圆形或椭圆为基础模型,大大地简化了船舶领域模型的设计。到2000年Smierzchalski对领域模型进行了优化,提出了多边形模型。[16]再到2006年Pietrzykowski从船舶航行的实时性出发提出了动态领域模型。[17-18]图2为几种典型的船舶领域模型的演变。整体上讲,船舶领域模型属于一种事后风险评价。上述几种典型的船舶领域模型都是以本船运动态势为中心,分别提出了安全领域的划分原则,但仍然存在一系列的问题需要解决:(1)由于信息占用的局限和不充分,仅为一种大体的估计,精确度较差。(2)没有考虑到无人艇航行中环境因素的变化等不确定性信息的影响。(3)没有考虑到无人艇航行中的能量消耗限制。
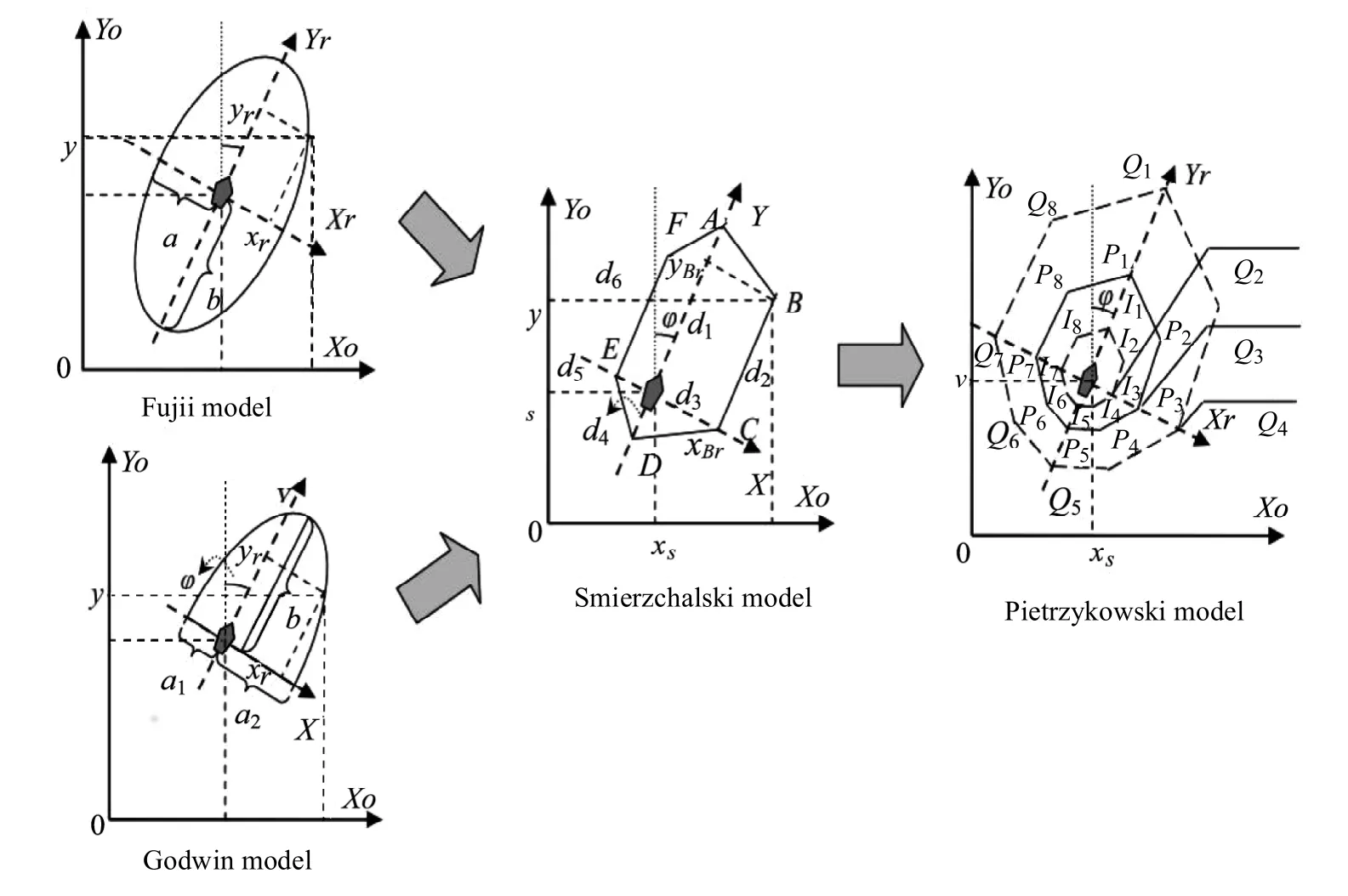
图2 几种典型的船舶领域模型的演变
2. 制导:路径规划
长航程无人艇规划从初始点到期望目标点的航行路线时,为提升无人艇的续航能力,需要对航行安全与能量消耗进行综合优化。而目前较为成熟的无人艇路径规划算法大多为处理障碍信息为目的的避障问题。
遗传算法[19-20]是目前无人艇进行路径规划最为常用的方法之一。在采用遗传算法进行航线规划之前,通常需要将问题进行简化,即假设每条船舶的起点和终点、速度、航向都已知,用一系列的转向点来表示规划的航线,将问题转化为为每条船舶寻找一条最优的航线,当所有的船舶按照规划的航线航行时,碰撞事故可以被成功避免。其中,在染色体生成中,通常是采用随机的方式产生转向点。
蚁群算法[21-22]和粒子群优化算法[23-24]是另外两种广泛应用于智能路径规划的随机优化方法。其计算量一般会随着解空间维度的增加呈指数增长的趋势,而当涉及的船舶数量过多时,则会增加计算量,甚至会导致无法在较短的时间内寻找到最优的路径。因此,目前该类研究的一个最重要的目标是提升搜寻效率,保证在规定的时间内收敛到令人满意的结果。
遗传算法、蚁群算法和粒子群优化算法等启发式算法的主要问题是一致性问题,即由于算法中存在很多随机变量,往往会导致在相同条件下的多次运算结果之间会存在差别。因此需要利用统计的方式对所得结果的局部扰动情况进行分析,以进一步验证算法的可靠性。
在实际应用中,长航程无人艇的路径规划问题需要以能耗和效率为主要考量,避障问题可以认为是路径规划问题的一部分。从提高路径规划效率角度出发,目前无人艇在进行路径规划过程中,海洋环境中洋流影响往往没有被充分考虑,甚至会被忽略。这会带来巨大的能量浪费。当洋流的影响特别强烈时,无人艇的执行机构不能独立达成控制效果,也会带来潜在的碰撞危险。[25]因此,长航程无人艇进行高效能路径规划所面临的挑战是如何发展精确有效的路径规划算法,智能地运用有益的洋流作用,消除有害的洋流影响,以达到提升无人艇续航能力与节约能耗的目标。[26]
3.控制:操纵运动控制与决策
长航时无人艇进行操纵运动控制与决策的主要任务是保证无人艇在按照最优或次优的规划路线航行过程中,既能够成功避免与周围动态和静态目标的碰撞(安全性),又能够使无人艇的转向和变速的次数尽可能少(经济性)。目前无人艇进行操纵运动控制与决策的实现方法,大多采用基于机器学习的智能算法,实际应用中以模糊逻辑算法[27-29]与支持向量机算法[30-32]最为典型。
模糊逻辑算法是较为经典的方法之一,其基本思想是将无人艇的航行参数与船舶驾驶员的实际经验相结合,构建一系列模糊规则,形成模糊规则库。并根据实际会遇情况调用规则库中的某些相似的规则,最后利用证据理论等方法对这些规则进行合成,得到最终的决策结果。模糊逻辑方法作为一种确定性的避碰决策方法,可以克服启发式算法不确定的缺点。但是这种方法需要依赖专家的主观知识,往往达不到最优控制效果,甚至会降低无人艇的工作效率。
基于回归型支持向量机的系统辨识技术已成功应用于无人艇的操纵运动建模与评价分析。支持向量机算法是一个凸二次规划问题,能保证解的全局最优性。另外,通过引入核函数避免了算法维数灾难问题,学习机的效率只同样本数目相关而同维数无关。尽管支持向量机对环境的变化具有较强的自适应能力,但是该技术还无法实现对不确定性、随机性信息的处理,因而不能充分地利用特征信息,识别的精度必然会受到影响。另外,从系统建模的角度而言,支持向量机采用的是典型的黑箱(Black Box)型学习模式,其获得的输入/输出关系无法以易于被人们接受的形式表示出来。而在实际的无人艇避碰操纵运动过程中,需要按照避碰规则的相关规定来进行避让操作。而且有研究显示,56%的碰撞事故是由违反海上避碰规则造成的。因此,在避碰决策中考虑避碰规则的要求就显得十分重要。但是由于支持向量机算法在本质上是一种黑箱算法,无法将避碰规则有效地纳入避碰控制与决策过程中。因此,不可避免地产生违反避碰规则的情况。
在无人艇操纵运动控制与决策方面,大部分研究还停留在理论阶段,运用后推法(Backstepping Control)、动态面(Dynamic Surface Control)等先进控制算法设计控制器以达到精确的航迹跟踪控制效果,并运用Matlab仿真验证其有效性。目前的技术离无人艇自动航行还有很大的差距,在基于碰撞风险与操纵性能进行自主控制与决策方面仍然面临很大的挑战。如何以避碰规则与控制精度作为约束条件,尽量减少执行机构的频繁操作,以达到节约能耗的目标仍是长航程无人艇所面临的难点问题之一。
三、无人艇导航-制导-控制系统的展望
导航、制导、控制三个子系统各自具有独立的功能,分别能实现无人艇的碰撞风险评估、路径规划以及操纵运动控制与决策。在进行长航程无人艇导航-制导-控制系统的总体架构时,为提升无人艇的整体续航能力,需综合考虑长航程无人艇的自主避碰、路径规划与运动控制中的能量消耗,达到平衡无人艇航行安全与能量消耗的目标。[33]航行安全与能量消耗本是水上交通工程中两个共生的核心问题,而传统方法论并未将其有效融合,极大制约了无人艇在复杂海洋环境下执行远距离任务的能力。[34]
因此,长航程无人艇导航-制导-控制系统的发展应侧重如下三个方面:
①利用多传感器信息融合架构船舶动态领域模型,进行无人艇碰撞风险评估;②基于数据挖掘算法预报洋流变化,进行无人艇高效能路径规划;③以可达集的概念为核心,引入避碰规则作为约束条件,增加无人艇控制与决策的弹性区间。并从能量消耗的角度出发,整合三方面的研究成果。进而完成导航-制导-控制系统的综合优化设计,达到提升长航程无人艇的续航能力与节约能耗的目标。
[1]YUH J,MARANI G,BLIDBERG D R.Applications of marine robotic vehicles[J].Intelligent Service Robotics,2011,4(4):221-231.
[2]MANLEY J E.Unmanned surface vehicles,15 years of development[R].Oceans.2008:1-4.
[3]BERTRAM V.Unmanned surface vehicles-A survey[J]. Skibsteknisk Selskab,2008:1-4.
[4]LIU Z,ZHANG Y,YU X,et al.Unmanned surface vehicles:An overview of developments and challenges[J].Annual Reviews in Control,2016,41:71-93.
[5]NIU H,LU Y,SAVVARIS A,et al.Efficient path planning algorithms for unmanned surface vehicle[J].IFAC-Papers OnLine, 2016,49(23):121-126.
[6]SAVVARIS A,TSOURDOS A.Development of collision avoidance algorithms for the C-Enduro USV[J].IFAC Proceedings Volumes, 2014,47(3):12174-12181.
[7]宋利飞.水面无人艇路径规划及自主避障方法研究[D].武汉:武汉理工大学,2015.
[8]FOSSEN T I.Guidance and control of ocean vehicles[M].1994.
[9]FOSSEN T I.Marine Control Systems:Guidance,Navigation, and Control of Ships,Rigs and Underwater Vehicles[M]//Marine Control System,Guidance,Navigation and Control of Ships,Rigs and Underwater.2002.
[10]FOSSEN T I.Handbook of Marine Craft Hydrodynamics and Motion Control[M].2011.
[11]CAMPBELL S,NAEEM W,IRWIN G W.A review on improving the autonomy of unmanned surface vehicles through intelligent collision avoidance manoeuvres[J].Annual Reviews in Control, 2012,36(2):267-283.
[12]MENNISE,PIATIS A,NIKITAKOS N.Applying stochastic models in maritime safety[J].Journal of Environmental Protection and Ecology,2009,10(4):975-985.
[13]ARBENM,ULF P.A grounded theory model for analysis of marine accidents[J].Accident Analysis and Prevention,2011,43: 1590-1603.
[14]FUJII Y,TANAKA K.Traffic capacity[J].Journal of Navigation, 1971,24(4):543-552.
[15]GOODWIN E M.A statistical study of ship domains[J].Journal of Navigation,1975,28(3):1328-344.
[16]SMIERZCHALSKI R,MICHALEWICZ Z.Modeling of ship trajectory in collision situations by an evolutionary algorithm[J].IEEE Transactions on Evolutionary Computation,2000,4(3):227-241.
[17]PIETRZYKOWSKI Z,URIASZ J.Ship domain in navigational situation assessment in an open sea area[C].Proceeding of the 5th International Conference on Computer and IT Applications in the Maritime Industries.2006.
[18]PIETRZYKOWSKI Z,URIASZ J.The ship domain-A criterion of navigational safety assessment in an open sea area[J].Journal of Navigation,2009,62(1):93-108.
[19]SZLAPCZYNSKI R,SZLAPCZYNSKA J.On evolutionary computing in multi-ship trajectory planning[J].Applied Intelligence, 2012,37(2):155-174.
[20]TSOU M,KAO S,SU C.Decision support from genetic algorithms for ship collision avoidance route planning and alerts[J].Journal of Navigation,2010,63(1):167-182.
[21]TSOUM, HSUEH C.The study of ship collision avoidance route planning by ant colony algorithm[J].Journal of Marine Science and Technology,2010,18(5):746-756.
[22]LIU L, DAI Y, WANT L,et al.Research on global path planning of underwater vehicle based on ant colony algorithm[J].Journal of System Simulation,2007,18:019.
[23]王得燕,刘以安.粒子群算法在多船避碰决策中的应用[J].计算机工程与设计,2009(14):3380-3382.
[24]田雨波,潘朋朋.免疫粒子群算法在船舶避碰上的应用研究[J].中国航海,2011(1):48-52.
[25]SUBRAMANI D N,LERMUSIAUX P F J.Energy-optimal path planning by stochastic dynamically orthogonal level-set optimization [J].Ocean Modelling,2016,100:57-77.
[26]LIU Y,BUCKNALL R.Path planning algorithm for unmanned surface vehicle formations in a practical maritime environment[J]. Ocean Engineering,2015,97:126-144.
[27]PERERA L,CARVALHO J,SOARES C.Fuzzy logic based decision making system for collision avoidance of ocean navigation under critical collision conditions[J].Journal of Marine Science and Technology,2011,16(1):84-99.
[28]LEE S,KWON K,JOH J.A fuzzy logic for autonomous navigation of marine vehicles satisfying COLREG guidelines[J].International Journal of Control Automation and Systems,2004,2:171-181.
[29]KAO S,LEE K,CHANG K,et al.A fuzzy logic method for collision avoidance in vessel traffic service[J].Journal of Navigation,2007, 60(1):17-31.
[30]罗伟林. 基于支持向量机方法的船舶操纵运动建模研究[D].上海:上海交通大学,2009.
[31]WANG X G,ZHOU Z J,YU L,et al.System identification modeling of ship manoeuvring motion in 4 degrees of freedom based on support vector machines[J].China Ocean Engineering, 2015,29(4):519-534.
[32]ABE S.Fuzzy support vector machines for multilabel classification[J].Pattern Recognition,2015,48(6):2110-2117.
[33]LEE T, KIM H, CHUNG H,et al.Energy efficient path planning for a marine surface vehicle considering heading angle[J].Ocean Engineering,2015,107:118-131.
[34]LIU Y,BUCKNALL R.The angle guidance path planning algorithms for unmanned surface vehicle formations by using the fast marching method[J].Applied Ocean Research,2016,59:327-344.
10.16176/j.cnki.21-1284.2017.06.004
白一鸣(1983—),男,大连海事大学信息科学技术学院,实验师,博士。