康复训练台的设计及研究
2017-07-12张龙
张龙
摘 要:临床实验表明,大部分下肢功能障碍都可以通过科学的康复训练来提高运动能力,本文基于该种现状,设计一款能用于帮助下肢障碍者进行康复使用的康复训练台。通过动作捕捉实验,获得了特定人体正常行走时的步态轨迹,采用MATLAB进行数据处理,利用遗传算法对平面连杆机构进行综合优化,得到了与人体正常步态轨迹比较接近的连杆机构尺寸及其对应的空间位置,并用SolidWorks软件建立了康复训练台的三维模型。通过设计康复训练台,为后续的康复训练提供服务。
关键词:步态轨迹;遗传算法;康复训练台;有限元分析
中图分类号:TH789 文献标识码:A
随着经济的发展,人民的生活水平、医疗条件逐步提高,但是下肢行走失能人数也在不断增长。疾病因素是我国老年肢体残疾人群的主要致残原因。对于运动失能的人群,尽早进行合理的康复训练,可以促进大脑皮层的可塑性发展,恢复肢体功能,有效地缓解病症,降低残疾程度,减少并发症。以神经可塑性原理为基础的重复性训练可实现患者大脑功能重组,通过机械装置辅助训练有望使患者逐渐康复。部分减重步行训练在临床上的应用就是基于上述原理。患者进行减重步行训练时,一般需要两名康复师来辅助,但是康复师的数量有限,难以满足患者的需求,也无法保证患者的康复训练时间和强度,这使需要人工辅助的康复训练的实际疗效受到制约。因此,开拓更加广泛的康复训练手段和进一步提高康复效率是解决患者运动功能障碍的当务之急。
本文旨在设计一款基于平面连杆机构的能近似实现正常步态轨迹与步行速度的家庭用训练台,该训练台结构简单,成本较低,使用安全,能够为患者提供合理地康复训练。
1.康复训练台的设计
为了设计步态训练台,首先应了解人体下肢运动的规律。对于下肢存在运动障碍的患者而言,如果进行相应的关节运动,则能够带动下肢肌肉进行收缩与拉伸,促进下肢运动神经系统重建,从而达到下肢康复的目的。步态是指人行走时的姿态,正常的步态是人体以最自然、最舒适的方式完成行走的步态,通常需要神经系统以及骨骼、肌肉进行协调完成。有研究表明,人体运动时的步态轨迹是一个近似椭圆的轨迹,同时,该轨迹并非一成不变地适用于每一个个体。对于不同身高、体重、年龄的人而言,其步态轨迹均是有所差异的。而且,有相关医学研究表示,下肢康复机器人带动人体进行康复训练时,各项步态参数对于康复训练十分关键,这些参数对于患者的康复效果起着决定性作用,并对康复后患者的步态有着较大的影响。因此,为患者提供近似的或者更加精确的步态轨迹显得尤为重要。
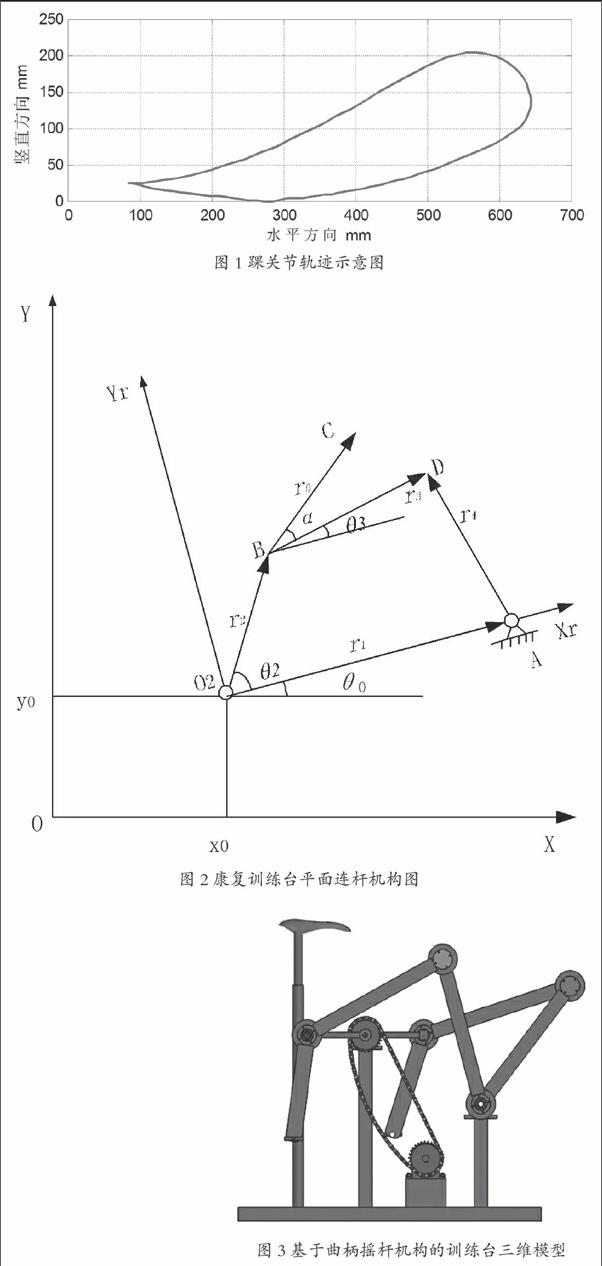
为了获取人在正常行走时的步态轨迹,首先运用三维动作捕捉系统进行了动作捕捉实验。图1为经过处理后得到的踝关节的轨迹。
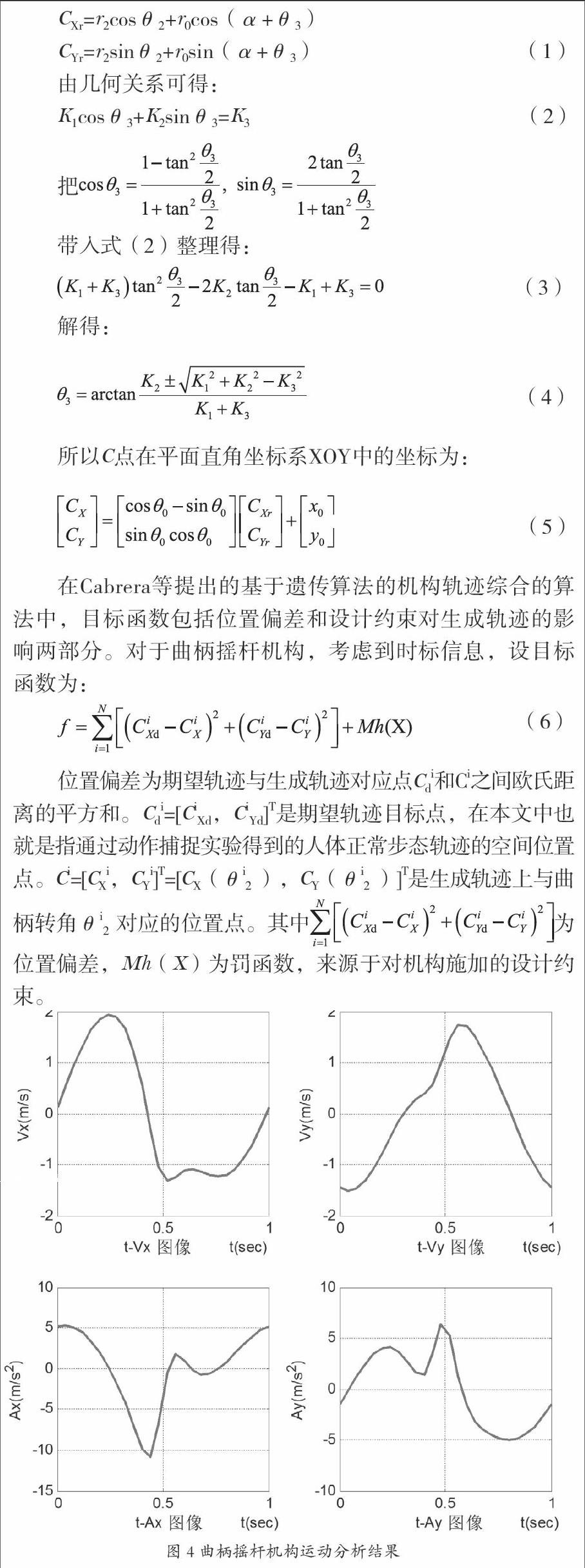
位置偏差为期望轨迹与生成轨迹对应点Cdi和Ci之间欧氏距离的平方和。Cdi=[CiXd,CiYd]T是期望轨迹目标点,在本文中也就是指通过动作捕捉实验得到的人体正常步态轨迹的空间位置点。Ci=[CXi,CYi]T=[CX(θi2 ),CY(θi2 )]T是生成轨迹上与曲柄转角θi2 对应的位置点。其中为位置偏差,Mh(X)为罚函数,来源于对机构施加的设计约束。
当满足机构曲柄存在的条件时,M=0,h(X)=0当不满足曲柄存在的条件时,M是一个很大的数,h(X)=1。为使求解得到的机构尺寸合理实用,各变量的取值范围应限制在合理的范围内。为使求解得到的机构尺寸合理实用,各变量的取值范围应限制在合理的范围内。初始种群是在搜索空间范围内随机生成的设计变量的组合。本文中在变量范围内随机生成NP个个体作为初始种群。初始种群需要不断地向较好的解的群体进化,这是通过自然选择,交叉,变异过程来实现的。适用度函数表征结果的适应能力,作为自然选择的依据,用来区分种群中个体的优劣。由于机构综合时目标函数越小越好,因此适用度函数取目标函数的倒数。变异操作的主要目的是维持种群的多样性。变异的过程是首先在群体中随机选择一个个体,然后将选中的个体按照一定的概率Pm随机的改变染色体中某个基因的值。Pm通常比较小。针对曲柄摇杆机构,种群规模取150,进化代数取200,变异概率取0.1,交叉概率取0.6,运用MATLAB软件,编写遗传算法程序代码,计算得到的最优结果如下所示:
其中l1,l2,l3,l4分别为机架、曲柄、连杆、摇杆的长度;r、α代表了执行点相对于连杆的位置;θ0表示机架倾斜的角度。对所得的尺寸进行圆整。
2.康复训练台的三维模型
由遗传算法确定了机构各个关机尺寸,应用SolidWorks软件建立训练台的三维模型如图3所示。训练台主要由机架、曲柄、连杆、摇杆、鞍座、电机、链轮、链条、曲柄小轴、曲柄滑轴、前后中轴、轴承、轴承端盖、螺栓、踏板等零部件组成。运用SolidWorks软件进行机器人机构的运动学仿真。将装配好的康复训练台模型施加运动仿真,并用SolidWorks软件中的Motion分析进行运动学分析,分别得到踏板中心(即患者脚心)处在X轴与Y轴方向上的速度、加速度。将分析结果数据导入MATLAB中,编写程序得到曲柄摇杆机构的速度、加速度图像如图4所示。故该曲柄摇杆机构得到的轨迹接近人体正常步态轨迹,故选择曲柄摇杆机构最为康复训练台的主体框架结构。
结论
本文从训练康复下肢障碍患者的角度出发,选择了足部驱动康复机构进行设计研究;通过动作捕捉实验,获得了人体正常行走时的步态轨迹,并用MATLAB编写程序,运用遗传算法(GA)对平面连杆机构进行优化综合,得到了能够近似实现人体正常步态轨迹的机构尺寸及其对应的空间位置。根据求解得到的机构尺寸,设计了曲柄摇杆机构的康复训练台,并建立了训练台的三维模型。明确了曲柄摇杆机构康复训练台的可行性与正确性,为后续的工程生产制作提供理论参考。
參考文献
[1]刘民,栾承.中国老年肢体残疾人群主要致残原因及其变化[J].中华老年医学杂志,2009,28(2):164-167.
[2]周宝玉,孙启良,桂德超,等.脑卒中患者早期康复的预后研究[J].中国康复医学杂志,2000,15(5):269-271.
[3]韩国芹.急性脑卒中偏瘫患者康复训练临床分析[J].临床医学,2009(11):98-99.
