移动双箱吊具及其故障维修
2017-07-12叶露
叶露

现代港口集装箱装卸作业中,吊具是使用最频繁的工具之一,其优劣直接影响集装箱码头的安全生产和装卸效率。根据故障频率统计,南京港龙潭集装箱码头场桥电气故障中65%以上属于吊具故障。由于移动双箱吊具具有性能稳定、工作效率高、故障发生率低等优点,近几年逐渐被集装箱码头采纳使用。移动双箱吊具采用先进、复杂的控制器局域网络(Controller Area Network,CAN)总线通信方式取代传统的点对点传输方式。随着移动双箱吊具使用年限的增加,其故障发生率显著提高,维修保养难度不断加大。本文基于对移动双箱吊具的机械结构、操作原理及其故障维修的分析介绍,为相关工作人员了解专业知识和提高操作技能打下基础。
1 移动双箱吊具机械结构
移动双箱吊具是全焊接的结构装配件(见图1)。伸缩梁嵌套在中部底梁内,并能在特制的抗磨块件上滑动。支承滚轮安装于伸缩梁尾端上部,用于减小带载伸缩摩擦力。吊具主梁滑道上装有4个中间移动架,每个中间移动架内装有1套可上下运动的中间旋锁箱,每个中间旋锁箱均与1个液压升降油缸相连接。当中间旋锁箱处于上升位置时,可进行单箱作业;当中间旋锁箱处于下降位置时,则进行双箱作业。中间旋锁移动液压油缸用于实现中间旋
锁箱与两侧边锁的位置固定,分别与左右2个下推杆相连,2个下推杆通过连接板分别与左右2对中间移动架连接。在中间旋锁移动液压油缸的推动下,中间移动架连同中间旋锁箱作向外和向内的平移运动,外伸梁作同步伸缩运动,从而实现吊具对在设计范围内的任意位置的2个20英尺集装箱的装卸及平移运动。
当移动双箱吊具作伸缩运动时,上下推杆处于脱钩状态,液压电动机驱动减速器的链轮链条以及上推杆相连接的链条。移动双箱吊具作带载双箱伸缩运动的运动过程如下:(1)将吊具调至双20英尺集装箱作业状态,双20英尺集装箱控制程序自动将伸缩梁定位至40英尺位置;(2)自动液压系统由常压模式调至高压模式;(3)控制伸缩油缸,将移动架置于40英尺位置;(4)上下推杆对位正确,限位发出信号,挂钩油缸动作;(5)锁定上下推杆,允许中锁升降油缸动作,中锁放下;(6)双箱指示灯点亮,司机进行双20英尺集装箱作业;(7)司机发出中锁分离或合拢指令,吊具中锁按指令实现中锁分离或合拢动作;(8)将吊具调至单箱作业状态,可实施相反顺序动作。
2 移动双箱吊具CAN总线
2.1 CAN总线
CAN总线是由德国BOSCH公司研究开发的国际标准化的串行通信协议,是目前国际上广泛应用的开放式现场总线之一。
CAN总线以广播的方式从一个节点向另一个节点发送数据。当节点发送数据时,该节点的中央处理器将需要发送的数据和标识符号发送给本节点的CAN芯片,并使其进入准备状态;CAN芯片一旦收到总线分配信号,就转变为发送报文状态,将需要发送的数据按照规定的报文格式发出。此时,网络中其他节点都处于接收状态,所有节点都要先自检来判断该报文是否发送给本节点。
2.2 CAN总线系统网络拓朴结构
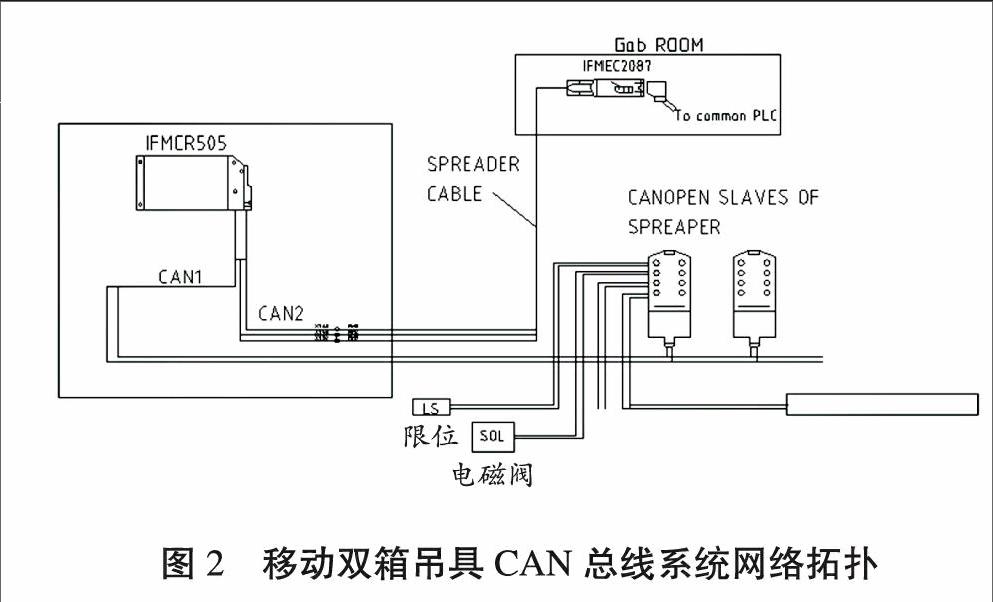
移动双箱吊具CAN总线系统网络拓扑结构(见图2)由1块IFM室外控制器CR0505(以下简称CR0505模块)、11块IFM室外型扩展节点输入/输出模块CR2032(以下简称CR2032模块)、47个IFM接近开关、25个电磁阀线包、1个高度检测限位、1个油缸磁尺、1个单箱工作量计数器、1个双箱工作量计数器、4个闭锁开关信号指示灯和2个终端电阻组成。
移动双箱吊具CAN总线信号汇集在CR0505模块,首先通过吊具垂缆传输到司机室,然后通过IFM EC2087模块把CAN总线信号转成PROFIBUS信号,再通过安川可编程逻辑控制器(Programmable Logic Controller,PLC)的PROFIBUS模块读入信号,最后通过PROFIBUS模块把转换后的执行动作指令传送到各个执行元件。
CAN总线已被广泛应用于汽车、集装箱空叉、集装箱正面吊和集装箱场桥等领域。移动双箱吊具采用CAN总线的原因如下:(1)能够在极端高温和极端低温的环境下工作;(2)能够承受极端的冲击力和震动力;(3)能够在较脏和潮湿的环境下工作;(4)能够承受由电瓶或发电机组引起的供电电压波动;(5)能够抵抗较高的导体和辐射干扰(总线机制决定);(6)工作待机时间长,停机检修费用低;(7)错误位置能够被操作人员尽快找到;(8)元器件模块化概念使得吊具服务简单化;(9)减少接线和分散控制,输入/输出模块坚固且灵活多用;(10)能够通过记录操作数据生成工作和系统数据文件。
2.3 CR0505模块
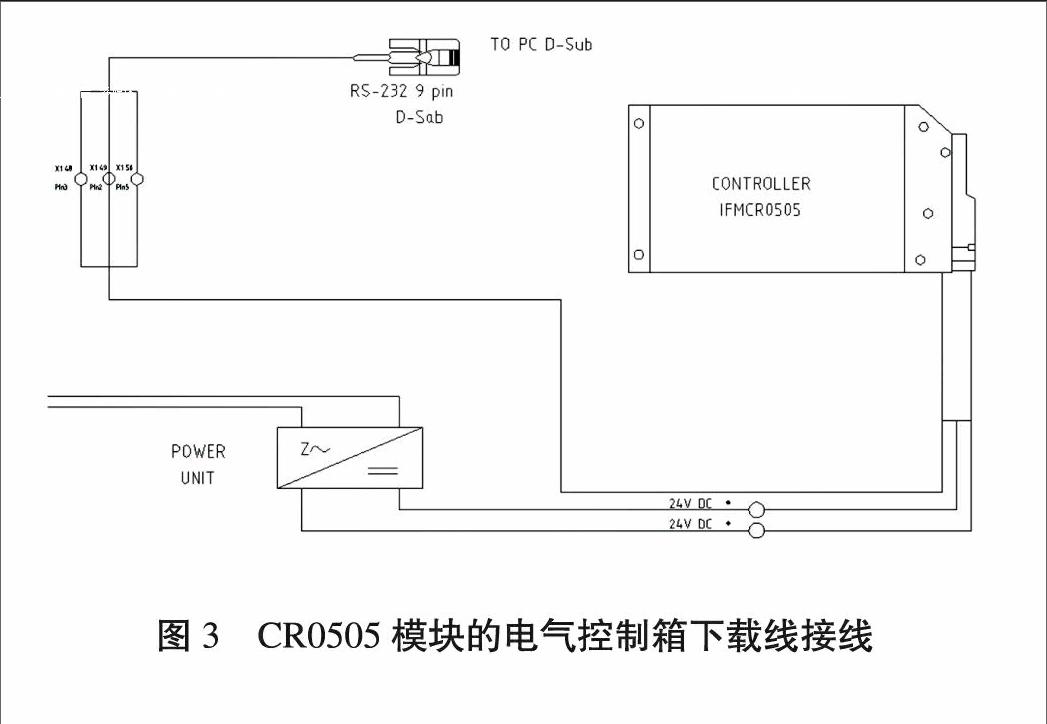
CR0505模块是移动双箱吊具的核心控制单元,由CoDeSys软件进行硬件配置和程序编制,负责安装移动双箱吊具的控制逻辑程序。CoDeSys软件是由德国3S公司研制开發的PLC软件,可通过自制的RS232串口通信线下载程序。自制的RS232串口通信线一端连接RS232母插头,用来连接笔记本计算机串口,另一端不接插头仅为线。
CR0505模块的电气控制箱下载线接线原理(见图3)为:插头pin2针出线接X1的49端子,pin3针出线接X1的48端子,pin5针出线接X1的50端子;用户再将48,49和50端子连接到端子台。
图3 CR0505模块的电气控制箱下载线接线
通过万用表测量CR0505模块的通信线阻值来判断其是否存在故障。在通信线连接的情况下,使用万用表测量CAN1(14脚、32脚)和CAN2(25脚、26脚)的通信线阻值应为(因为电路模块上接有2个的终端电阻),如果测量阻值不为,则可能是CR2032模块通信线中断;在通信线中断的情况下,通信电阻测量值应为26~,如果测量值不在上述范围内,则模块自身故障导致不能正常工作。在测量正常的情况下,通过观察CR0505模块指示灯来判断CAN总线系统是否存在故障,详情见表1。CAN1通信线与IFM EC2087模块相连,用于与上位机通信;CAN2通信线与CR2032模块相连,用于收集限位信号和发出电磁阀动作指令。
表1 CR0505模块指示灯说明
2.4 CR2032模块
CR2032模块用于收集移动双箱吊具的限位、磁尺、高度信号和输出动作指令,并传递给相应电磁阀。该模块是8输入8输出模块,可以输入和输出开关量及模拟量信号,其中:1,3,5和7插口为信号输入模块,2,4,6和8插口为信号输出模块,每个插口最多能够连接2个下层传感器。
CR2032模块具有两大优势:(1)分散式控制,利用自身优势在远端收集信号后通过CAN总线将收集的信号传送到控制器,再由控制器将信号通过CAN总线输出到扩展模块,最后由扩展模块将信号释放到终端传感器,从而大大简化吊具线路,有利于控制成本和查询故障;(2)物理端子通过程序设定使其作为不同类型的输入或输出。
CR2032模块具有两大特色:(1)扩展节点不仅通过每个输入、输出的指示灯,而且还通过扩展电源指示灯和CAN总线通信指示灯来判断扩展节点是否正常工作,为故障维修提供很大帮助;(2)扩展节点壳身带有旋钮,用于设定节点号和波特率,便于CAN总线添加节点。
3 移动双箱吊具CAN总线通信故障维修
在生产过程中,移动双箱吊具使用频度最高,并且受冲击程度最大,导致其故障率也最高。掌握移动双箱吊具的电气控制原理和机械工作原理,有助于合理保养和快速维修移动双箱吊具。由于移动双箱吊具的工况特殊,其电气单元设计有内部联锁保护,若有模块出现通信故障,IFM主模块立即停止运行,使整体通信中断,以防止造成重大事故。移动双箱吊具的故障维修难点主要是CAN总线通信故障维修。
3.1 IFM扩展模块自身故障
第一种情况:通过自身指示灯排查确认故障,并通过更换新模块来解决此类故障,更换新模块时须按原模块上的拨档设置新模块。
第二种情况:模块自身指示灯检测不出模块故障。此类故障会造成 CR0505模块运行故障,由于移动双箱吊具中设有模块检测保护命令程序,导致CR2032模块上的电源指示灯常亮,而其他指示灯不亮。CR0505模块与CR2032模块之间设有通信检测,一旦CR0505模块接收不到模块信息就会停止运行,以防止发生安全事故。故障识别流程如下:(1)用RS232串口通信线将笔记本计算机与CR0505模块相连接;(2)下载吊具生产商提供的未加保护命令的程序,用以识别故障模块;(3)下载完成后,CR0505模塊即可正常运行(指示灯闪烁频率为),CAN总线通信指示灯正常闪烁,信号输入、输出指示灯正常亮起,CR2032模块电源指示灯正常亮起。
3.2 CAN总线通信故障
CAN总线通信故障表现为CR0505模块不运行。故障识别流程如下:(1)用笔记本计算机下载检测程序至CR0505模块,检测故障模块;(2)然后,断开电源,打开模块及靠其最近的完好模块的接线盒;(3)用万用表测量相应接线点,识别通信故障线路。
(编辑:许玲 收稿日期:2017-02-20)
