基于改进人工势场的无人机编队防碰撞控制方法
2017-07-07朱旭闫茂德张昌利林海屈耀红
朱旭, 闫茂德, 张昌利, 林海, 屈耀红
(1.长安大学 电子与控制工程学院,陕西 西安 710064; 2.长安大学 信息工程学院,陕西 西安 710064; 3.西北工业大学 自动化学院,陕西 西安 710129)
基于改进人工势场的无人机编队防碰撞控制方法
朱旭1, 闫茂德1, 张昌利2, 林海1, 屈耀红3
(1.长安大学 电子与控制工程学院,陕西 西安 710064; 2.长安大学 信息工程学院,陕西 西安 710064; 3.西北工业大学 自动化学院,陕西 西安 710129)
针对无人机编队飞行过程中的机间防碰撞、障碍物规避问题,提出了基于改进人工势场的防碰撞控制方法。利用一致性理论,引入了通信拓扑和通信权重的概念,给出了改进的机间人工势场函数和作用区域。定义了无人机与空域障碍物的斥力势,构建了受二者相对运动速度影响的辅助斥力势,使无人机高效地规避障碍物,并给出了机间防碰撞、障碍物规避的总速度场。提出了防碰撞控制算法,给出了速度、俯仰角、偏航角等防碰撞指令;设计了一种飞行控制器来跟踪防碰撞指令,构建了含防碰撞控制算法、飞行控制器的完整编队系统。三维飞行仿真结果表明:所提编队防碰撞控制方法可以快速实现机间防碰撞,并能有效规避空域障碍物。
无人机编队;机间防碰撞;障碍物规避;改进人工势场;通信拓扑;飞行控制
无人机编队飞行可以提高完成任务的效率,拓宽无人机使用范围,在军用和民用领域均有着广阔的应用前景[1]。如果编队中的无人机互相碰撞或与空域障碍物发生碰撞,不仅会造成经济损失,而且会严重影响整个战局,因此增强无人机的防碰撞能力是提高编队执行任务精确度和成功率的关键。
针对无人机编队的防碰撞控制问题,国内外学者进行了大量的研究,常见的防碰撞控制方法有人工势场[2]、最优化理论[3]、神经网络[4]等。人工势场法因其实现简单、意义明了、计算量小、实时性好,引起了广泛关注[5]。人工势场法最初是由Khatib提出的一种虚拟力法,使障碍物的分布情况及其形状等信息反映在环境每一点的势场值当中,根据势场值的大小,无人机决定行进方向和速度[6]。人工势场实现防碰撞主要依靠斥力势,同时兼顾引力势,以确保人工势场有正确的平衡态[7]。为解决无人机执行机构的饱和问题,分叉型人工势场被用来评估编队的防碰撞能力[8]。对于空域障碍物,考虑障碍物闯入的突然性,使用非线性预测控制与人工势场相结合的方式,启动快速规避[9]。障碍物较多时,使用规避时间、消耗能量等构建防碰撞代价函数,以高效、节能地规避障碍物[10]。目前,人工势场用于编队防碰撞时存在严重缺陷:无人机编队不能充分利用机间通信,没有考虑通信结构对人工势场的影响,与实际情况不符。另外,大多数文献未清晰阐述如何将人工势场应用到无人机的飞行控制中,缺乏实际应用价值。
近年来,多智能体一致性理论逐渐应用于编队控制、群集运动、姿态同步、状态估计等领域,仅依靠局部信息交互的一致性算法日渐成熟,其智能化程度高、运算代价低,极大地促进了编队控制的发展[11]。一致性理论深入研究通信机制,给出了通信结构对编队控制影响的普遍规律[12]。MCLAIN将一致性算法应用于编队控制问题,指出对于任意有向信息流,只要存在有向生成树就能实现精确的编队控制[13]。文献[14]通过有限时间一致性算法处理了有领导者和无领导者编队的防碰撞问题,以提高编队控制的效率。虽然这些文章只是初步地探索了利用一致性理论解决编队控制问题,未涉及防碰撞控制,也未深入探索通信权重对编队控制的影响,但是仍然催生了新的研究动机—使用一致性理论克服传统人工势场在处理编队防碰撞问题时的固有缺陷。将一致性理论应用于编队控制,引入通信拓扑和通信权重的概念,能够充分利用机间通信,而且依据不同的通信权重可以划分编队中无人机的避碰优先级别,优先保证处于重要地位无人机的安全。
1 机间人工势场
考虑由n架相同型号的无人机组成编队,第i架无人机表示为Ui。令Ji(ρi)为无人机Ui与它机Uj之间产生的势场Jij(ρij)的总和,对于空间中的每一个位置,J(ρ)和Jij(ρij)都是可微分的。ρi为Ui的三维位置,ρij为从Ui到Uj的位置矢量。编队之间的人工势场如图1所示。
1.1 引入一致性概念改进人工势场
传统人工势场认为无人机可以获得编队中所有它机的信息,这与现实中的通信拓扑往往不相符;而且没有设置通信权重,这就意味着不利于划分编队中无人机的防碰撞优先等级,难以保证重要成员的安全。
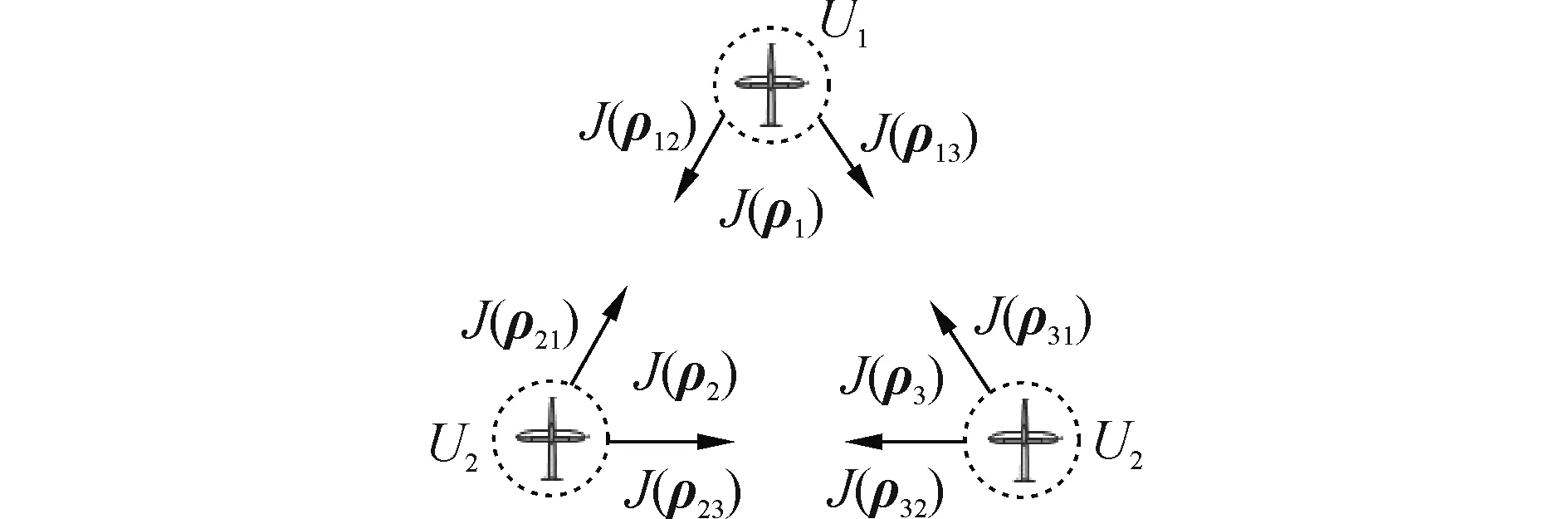
图1 人工势场示意图Fig.1 Schematic drawing of artificial potential
为了改进这两个缺陷,将多智能体一致性概念引入人工势场,形成新的人工势场。令所有向Ui通信的无人机构成的集合为Ni,Ui只能获得向其通信的其它无人机的信息,如位置、姿态等。令aij表示从Uj到Ui的通信权重,体现了Uj的信息对于Ui的重要程度。无人机Ui的总势与分势的关系定义为
‖ρij‖)
(1)
式中:‖·‖为L2范数。只有满足j∈Ni的无人机才向Ui通信,这就体现了真实的通信拓扑。同时,aij体现了Uj的信息对于Ui的重要程度,当Ui执行避碰动作时,它优先避开连接权重高的无人机。即使编队发生了撞机状况,也是先撞毁处于次要地位的无人机。

(2)

(3)
1.2 机间人工势场的设计
分别设计机间人工势场的斥力势和引力势,重点设计斥力势。首先,构建机间斥力势为广义Morse函数[15]:
(4)
式中:b、c均为常数,分别决定斥力势的幅值和变化速度,均为可调节参数。D=(‖ρij‖min,‖ρij‖max]决定了机间人工势场的作用区域,‖ρij‖min>0为机间最小安全距离,‖ρij‖小于该值则发生机间碰撞;‖ρij‖max为机间人工势场的最大作用距离。
(5)
式中:kij为正常数,改变kij的取值可以调节引力势的强度。

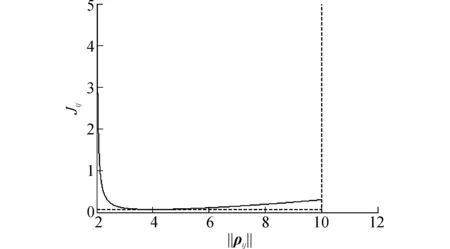
图2 人工势场函数Fig.2 Artificial potential function
从图2中可以发现,平衡点在‖ρij‖=4处,此时机间斥力势与引力势平衡,机间人工势场为唯一的最小值。 2<‖ρij‖<4时,机间距离较小,斥力势起主要作用;4<‖ρij‖≤10时,机间距离较大,引力势起主要作用。‖ρij‖>10时,机间人工势场不再起作用。
给出机间人工势场后,需要定义一个与距离相关的机间速度场,来实现无人机编队的避碰。综合斥力势(4)和引力势(5),对于‖ρij‖∈D,可得到机间速度场函数:
Vi(ρi)= -(ρij)=
(6)
式(6)是改进的机间人工势场方法,充分考虑了通信拓扑、通信权重对构建人工势场的影响。只要通信连通,编队就可以避免机间碰撞,实现稳定的群集运动。机间人工势场在平衡点的速度场为0,所以参数kij、b、c的取值应满足:

(7)
2 空域障碍物的人工势场
基于人工势场的防碰撞控制还可以扩展到规避空域障碍物,但是与机间避碰机制有所差别。在机间防碰撞过程中,相互靠近的无人机均可做机动调整;而在障碍物规避过程中,只有无人机能主动躲避障碍物,而障碍物不能主动躲避无人机。所以,规避障碍物时,只能单方面调整无人机的轨迹和姿态。另外,不用设计引力势,因为无人机无需靠近障碍物。
假设障碍物的位置为ρo=(xo,yo,zo)T,定义无人机与障碍物间的斥力势为

(8)
其中,
(9)
式中:bo、co均为常数,分别决定斥力势的幅值和变化速度。E=(‖ρio‖min,‖ρio‖max]决定了与障碍物斥力势的作用区域,‖ρio‖min为无人机与障碍物之间的最小安全距离,‖ρio‖max是避障边界。Vo代表障碍物相对于无人机的运动速度,当障碍物向无人机靠近时,Vo>0;否则,Vo≤0。无人机周边没有障碍物或者不与障碍物靠近时,k(Vo)=0;当障碍物靠近无人机时,k(Vo)>0,且靠近速度越高时,k(Vo)值越大。当Vo→0时,k(Vo)→0;当Vo→+∞时,k(Vo)→1。
总之,引入相对速度可以使无人机更具效率地规避障碍物,以补偿障碍物不能主动规避无人机的缺点。
Vi(ρio)=-‖ρio‖
(10)
综合机间速度场(6)和避障速度场(10),当‖ρij‖∈D且‖ρio‖∈E时,Ui的总速度场为

(11)
3 无人机编队防碰撞控制系统设计
得到无人机的速度场后,需根据速度场设计编队防碰撞控制系统。编队防碰撞控制系统,包含防
碰撞控制算法和相应的飞行控制器。防碰撞控制算法是外环,产生防碰撞指令;飞行控制器是内环,跟踪防碰撞指令来调整无人机姿态。无人机防碰撞控制系统结构如图3所示。
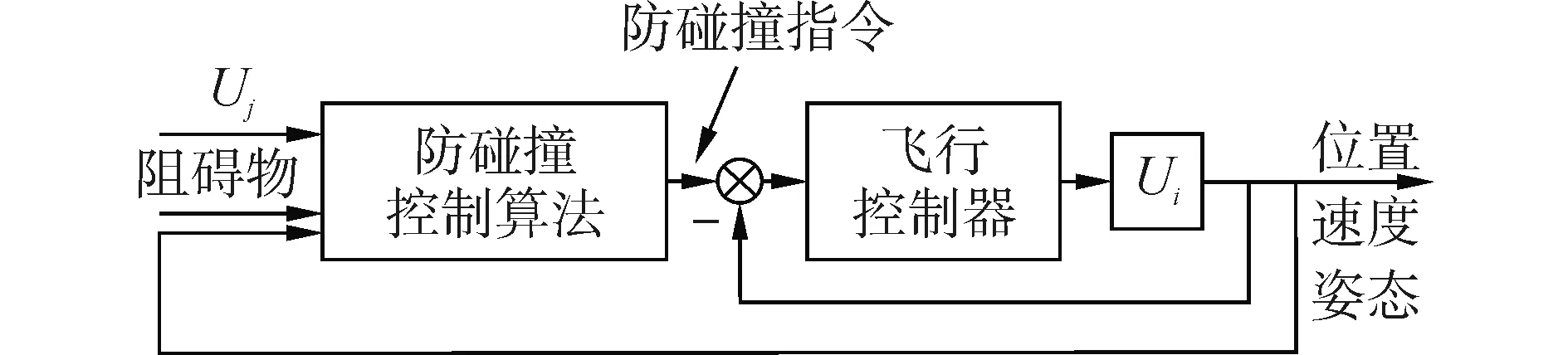
图3 无人机防碰撞控制系统结构Fig.3 The structure of collision avoidance control system for UAV
3.1 防碰撞控制算法
防碰撞控制算法综合本机、它机和障碍物的信息,经过人工势场的计算,产生速度指令、俯仰角指令、偏航角指令,并将这些防碰撞指令发送给飞行控制器。
防碰撞控制是通过调整各无人机的速度矢量实现的。因此,可将期望的速度矢量定义为
(12)


(13)
(14)
(15)

(16)
3.2 飞行控制
无人机模型使用六自由度线性模型,无耦合的纵向和横侧向方程分别为
(17)
(18)

将纵向和横侧向方程写为统一形式:
(19)

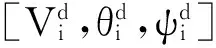
然后,给出一种PID控制器来实现飞行控制,即图3中的飞行控制器,跟踪防碰撞指令。PID控制器的结构如图4所示。
图4 PID飞行控制器结构Fig.4 The structure of the PID flight controller
(20)
(21)
进而得到
(22)
如果系统(22)是可控的,需要满足
(23)
式中:nA是矩阵A的秩,nC是矩阵C的秩。
最后,设计PID控制器:
(24)
式中:KP、KI、KD分别为比例、积分、微分系数矩阵。式(24)即所设计的飞行控制器,用来跟踪防碰撞指令,与式(16)共同构成了防碰撞控制系统。
4 仿真实例及分析
仿真采用3 架相同的小型固定翼无人机来验证基于改进人工势场的无人机编队防碰撞方法。每架无人机质量85 kg,翼展2.4 m。图5给出了编队的通信拓扑,从Uj到Ui的边代表Ui可以获得Uj的位置、姿态等信息。
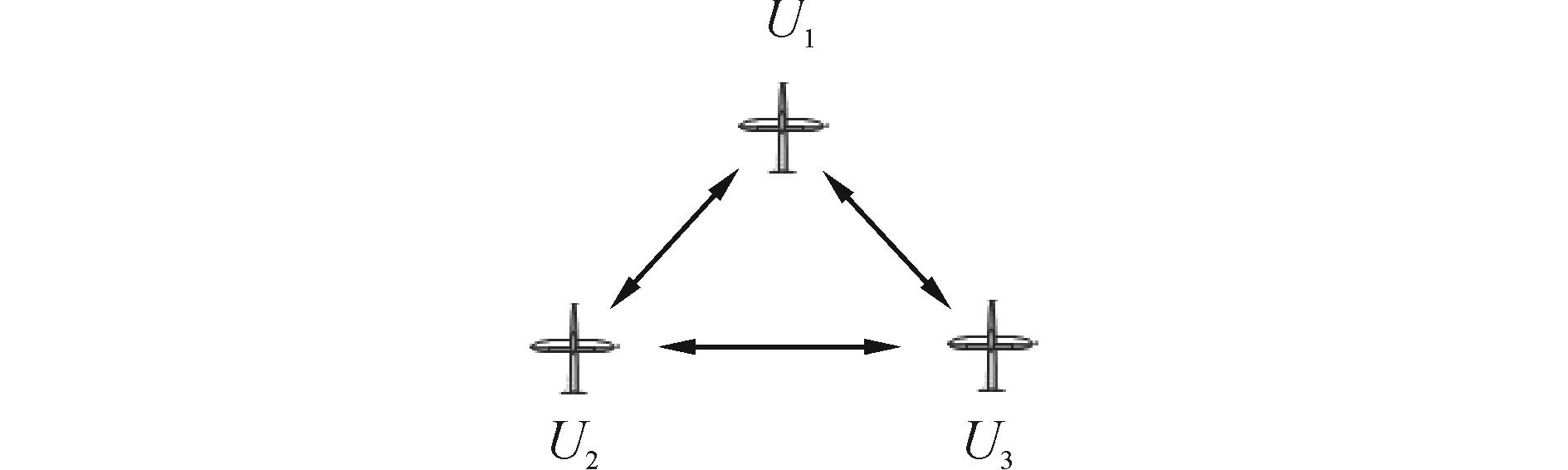
图5 编队的通信拓扑Fig.5 Communication topology of the formation
这是一组机间距离较近的初始仿真条件,其中,无人机U2与U3之间的距离只有2m,是机间距离的最小值,需要实施紧急避碰;U1与U2之间、U1与U3之间也只有2.8m的间距,同样需要避碰。编队的其他初始仿真参数如表1所示。
表1 编队的初始仿真参数
给定不同的通信权重,令a12=2,a13=2,a21=1,a23=1,a31=1,a32=1。U1在编队中处于最重要位置,防碰撞时优先保证其安全。使用防碰撞控制算法(16)和飞行控制器(24)进行仿真。
图6为速度、俯仰角、偏航角的响应曲线,以及机间平面距离和高度差曲线。为了清楚体现机间防碰撞控制效果,只选取了前5 s。机间距离从不足到回到预定队形,均用了不到2 s的时间,都能满足防碰撞控制的要求。但是,从图6(a)、(b)的曲线中可以发现,U2、U3的速度、俯仰角的变化尺度比U1更剧烈,优先躲避重要度更高的U1。图6(d)、(e)反映了机间距离的变化情况,U1与U2、U1与U3之间分离地快,U2与U3之间分离地慢,也体现了U1重要度更高。所以,引入不同的通信权重可以有效优先保证高重要度无人机的安全。
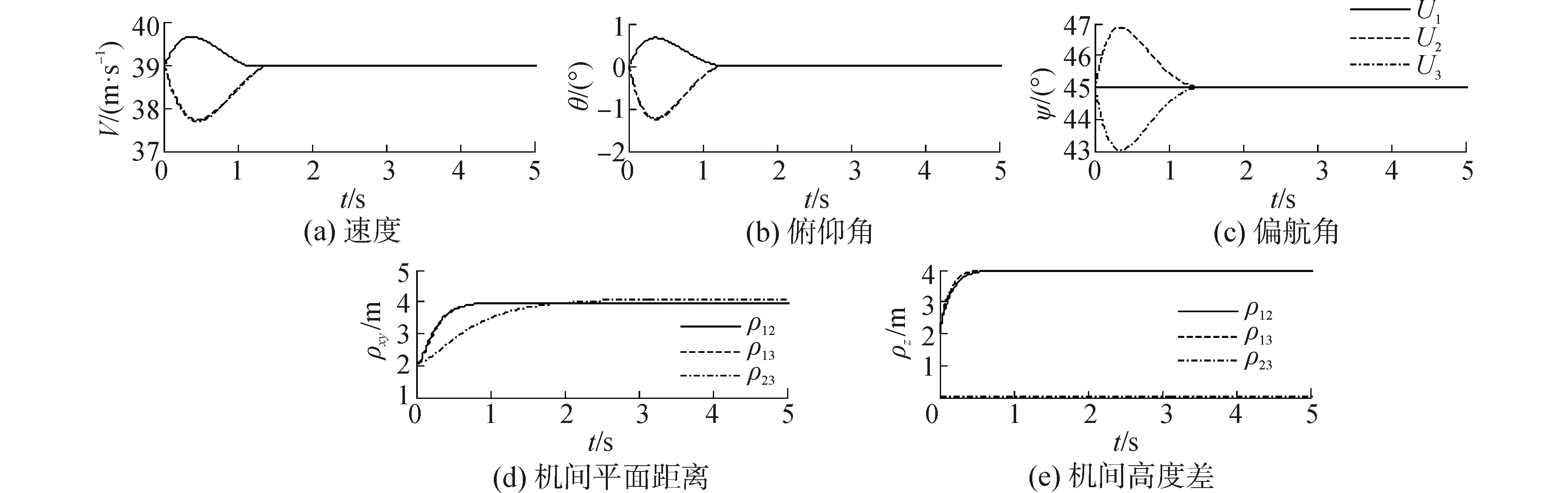
图6 机间防碰撞的响应过程Fig.6 The response process of collision avoidance between UAVs
图7为防碰撞控制算法(16)和飞行控制器(24)长时间作用下的仿真结果,仿真初始条件与图6相同,仿真时间为500s。障碍物坐落在编队的预定航线上,在图上以圆球表示。编队同时对速度、俯仰角、偏航角进行调整,合理地调整航线,实现了对空间障碍物的快速规避。所以,防碰撞控制算法(16)和飞行控制器(24)不仅能够实现机间防碰撞,还能够实现对空域障碍物的规避。
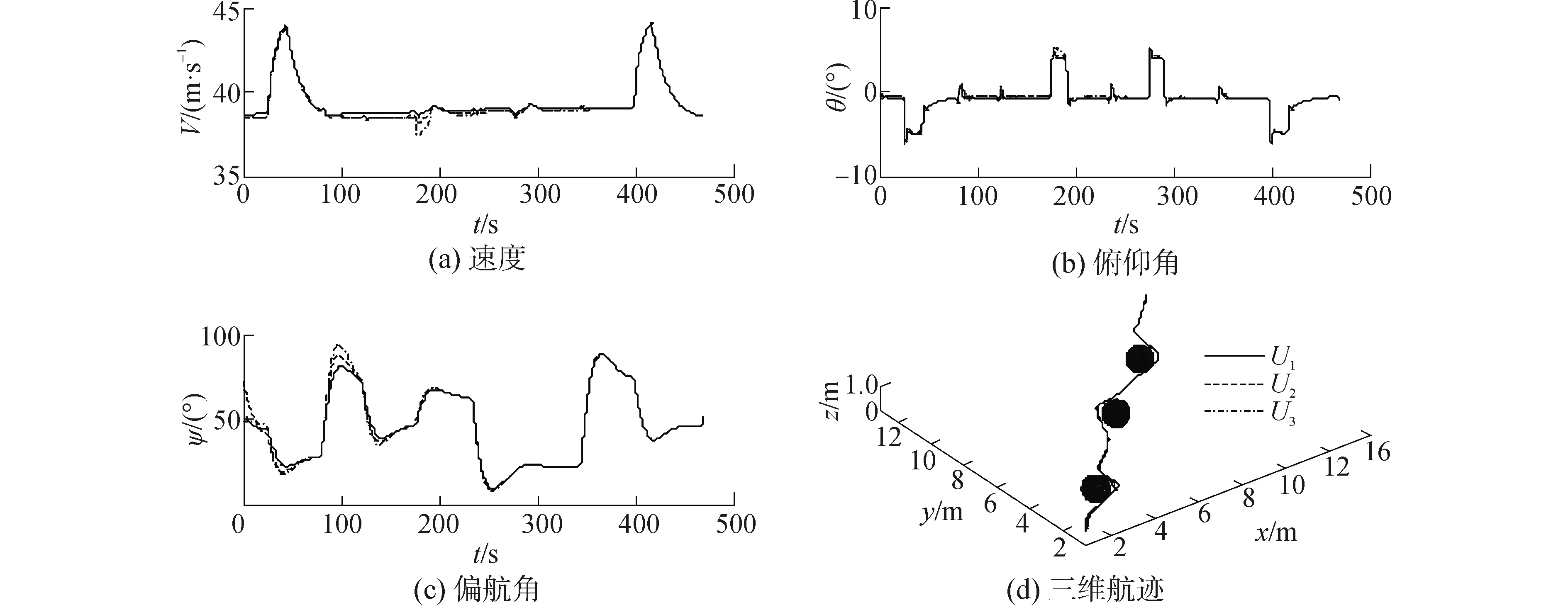
图7 规避空域障碍物的响应过程Fig.7 The response process of avoiding obstacles
5 结论
1) 本文针对无人机编队飞行过程中的机间防碰撞问题,提出了基于改进人工势场的防碰撞控制方法。利用一致性理论中通信拓扑和通信权重的概念,给出了改进的机间人工势场函数。三维飞行仿真结果表明,改进的机间人工势场有效利用了机间通信,不同的通信权重优先保障了编队中处于重要地位无人机的安全。
2) 针对障碍物规避该问题,构建了受无人机与空域障碍物相对运动速度影响的辅助斥力势,提高了无人机编队规避障碍物的效率。仿真结果表明,由于引入了障碍物与无人机的相对运动速度,弥补了障碍物不能主动规避无人机的缺点。
3) 综合本机、它机和障碍物的信息,经过改进人工势场的计算,产生防碰撞指令。并设计了一种PID飞行控制器来跟踪防碰撞指令,进而构建了含防碰撞控制算法、飞行控制器的完整编队系统。该编队系统简单有效,具有良好的工程应用前景。
[1]樊琼剑,杨忠,方挺,等.多无人机协同编队飞行控制的研究现状[J].航空学报, 2009, 30(4): 683-691.
FAN Qingjian,YANG Zhong,FANG Ting,et al.Research status of coordinated formation flight control for multi-UAVs[J].Acta aeronautica et astronautica sinica, 2009, 30(4): 683-691.
[2]KURIKI Y,NAMERIKAWA T.Experimental validation of cooperative formation control with collision avoidance for a multi-UAV system[C]//Proceedings of the 6th International Conference on Automation. Piscataway, 2015, 2: 531-536.
[3]李霞,张继海,谢文俊,等.无人机自主防碰撞方法研究[J].飞行力学, 2011, 29(6): 48-51. LI Xia, ZHANG Jihai, XIE Wenjun, et al. Research on autonomic collision avoidance method for UAV[J].Flight dynamics, 2011, 29(6): 48-51.
[4]YADAV V,WANG Xiaohua,BALAKRISHNAN S N.Neural network approach for obstacle avoidance in 3-D environments for UAVs[C]//Proceedings of the 2006 American Control Conference[s.l.], 2006, 6: 3667-3672.
[5]KHATIB O.Real-time obstacle avoidance for manipulators and mobile robots[C]//Proceedings of 1985 IEEE International Conference on Robotics and Automation.Piscataway,USA, 1985: 500-505.
[6]KHATIB O.A unified approach for motion and force of robot manipulators[J].IEEE journal of robotics and automation, 1987, 3(1): 43-53.
[7]VRIES E,SUBBARAO K.Cooperative control of swarms of unmanned aerial vehicles[C]//49th AIAA Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition.London, 2011, 9: 1-5.
[8]BENNET D J,MCINNES C R.Autonomous three-dimensional formation flight for a swarm of unmanned aerial vehicles[J].Journal of guidance, control, and dynamics, 2011, 34(6): 1899-1908.
[9]MUJUMDAR A,PADHI R. Reactive collision avoidance using nonlinear geometric and differential geometric guidance[J].Journal of guidance, control, and dynamics, 2011, 34(1): 303-310.
[10]DUAN Haibin,Luo Qinan,SHI Yuhui, et al.Hybrid particle swarm optimization and genetic algorithm for multi-UAV formation reconfiguration[J].IEEE computational international magazine, 2013, 8(3): 16-27.
[11]宗令蓓,谢凡,秦世引.基于MAS的无人机编队飞行智能优化控制[J].航空学报, 2008, 29(5): 1326-1333.
ZONG Lingbei, XIE Fan, QIN Shiyin.Intelligent optimizing control of formation flight for UAVs based on MAS[J].Acta aeronautica et astronautica sinica, 2008, 29(5): 1326-1333.
[12]MCLAIN T.Cooperative rendezvous of multiple unmanned air vehicles[C]//AIAA Guidance, Navigation and Control Conference.Reston, 2000.
[13]LI Shihua,WANG Xiangyu.Finite-time consensus and collision avoidance control algorithms for multiple AUVs[J].Automatica, 2013, 49(11): 3359-3367.
[14]D′ORSOGNA M R,CHUANG Y L,BERTOZZI A L,et al.Self-propelled particles with soft-core interactions: patterns, stability, and collapse[J].Physical review letters, 2006, 96(10): 104302-104304.
[15]吴森堂,费玉华.飞行控制系统[M].2版.北京:北京航空航天大学出版社, 2006: 9-60.
WU Sentang,FEI Yuhua.Flight control system[M].2nd ed.Beijing:Beihang University Press, 2006: 9-60.
本文引用格式:
朱旭, 闫茂德, 张昌利, 等. 基于改进人工势场的无人机编队防碰撞控制方法[J]. 哈尔滨工程大学学报, 2017, 38(6): 961-968.
ZHU Xu, YAN Maode, ZHANG Changli, et al. UAV formation collision avoidance control method based on improved artificial potential field[J]. Journal of Harbin Engineering University, 2017, 38(6): 961-968.
UAV formation collision avoidance control method based on improved artificial potential field
ZHU Xu1, YAN Maode1, ZHANG Changli2, LIN Hai1, QU Yaohong3
(1.School of Electronic and Control Engineering, Chang′an University, Xi′an 710064, China; 2.School of Information Engineering, Chang′an University, Xi′an 710064, China; 3.School of Automation, Northwestern Polytechnical University, Xi′an 710129, China)
For the formation flight of unmanned aerial vehicles (UAVs), the problems of collision avoidance among UAVs and obstacle avoidance were investigated. In addition, a collision avoidance control method based on the improved artificial potential field was proposed. The concepts of communication topology and communication weights were introduced via consensus theory. The improved artificial potential field function was given with its effective range. The repulsive potential field between the UAV and an obstacle was defined, and an auxiliary repulsive potential affected by the relative velocity between them was constructed to make the UAV avoid the obstacle more efficiently. Moreover, a total velocity field for collision avoidance and obstacle avoidance was formulated. A collision avoidance algorithm was proposed to generate the orders of velocity, pitch angle, and yaw angle. A flight controller was designed to track these orders, and a whole formation system containing the collision avoidance control algorithm and flight controller was constructed. Three-dimensional flight simulation results show that the proposed method could achieve collision avoidance among UAVs quickly, as well as avoid obstacles effectively.
unmanned aerial vehicles (UAVs) formation; collision avoidance among UAVs; obstacle avoidance; improved artificial potential field; communication topology; flight control
2016-04-14. 网络出版日期:2017-04-05.
国家自然科学基金项目(61473229);中央高校基本科研业务费项目(310832163403,310832161012);陕西省科技公关项目(2015GY052);陕西省国际科技合作与交流计划(2015KW-023);西安市科技计划(CXY1512-3).
朱旭(1987-), 男, 讲师, 博士.
朱旭,E-mail: zhuxu_1987@sina.com.
10.11990/jheu.201604037
http://www.cnki.net/kcms/detail/23.1390.u.20170405.1553.002.html
V249.1
A
1006-7043(2017)06-0961-08
