RV减速器的键合图建模与仿真分析
2017-07-07单丽君乙永强
单丽君,乙永强
(大连交通大学 机械工程学院,辽宁 大连 116028)
RV减速器的键合图建模与仿真分析
单丽君,乙永强
(大连交通大学 机械工程学院,辽宁 大连 116028)
为研究RV减速器系统的弹性特性、齿轮间啮合刚度和阻尼对系统动态特性的影响,需要对系统进行建模和仿真分析.由于采用传统动力学建模存在部分物理过程难以用数学方法表达,状态方程繁琐难以求解等缺点,采用键合图理论建模的方法能够避免这些缺陷,实现系统规则化建模.建立了RV减速器的键合图模型,利用键合图专用软件20-Sim进行仿真分析.仿真结果表明:键合图模型是一种相当优越的数学模型,应用键合图理论对系统进行仿真能较好地反映系统的动态特性,为RV减速器的设计、改进提供一定的理论依据.
键合图理论; RV减速器; 动态特性; 仿真
RV减速器是在摆线针轮传动基础上发展起来的一种二级封闭式、少齿差行星传动机构,具有传动比范围大、承载能力强、刚度大、传动效率高等诸多优点,广泛应用于工业机器人等精密传动领域.为了保证RV减速器的一系列优点在工业机器人应用中得到充分发挥,系统地对RV减速器展开动态特性的研究,不仅对RV减速器的设计、制造有着十分重要的应用价值,而且对促进工业机器人产业的发展具有重大的工程实际意义.
键合图法(Bond Graph Method,BGM)是一种系统动力学建模的方法,它用简单的图形描述系统中各个组成部分的相互作用关系,为系统动态特性的研究提供了一种新方法与途径[1].本文基于键合图理论建立RV减速器的系统动力学模型,并运用20-Sim仿真软件对模型进行仿真分析,仿真结果对完善RV减速器的动态性能提供一定的理论依据.
1 键合图的基本原理
键合图理论是根据工程系统中的功率传递、转换、贮存和耗散等原理,运用特定的线段及符号所构成的图形、信息流向等,规则化地建立一个工程系统的动态模型,进行系统的动态特性分析与控制.在工程系统中,相互作用的子系统必然传递功率,这是产生键合图的基本依据[2].
键合图是彼此间用键连接起来的键图元的集合,连线代表功率的流动,如图1所示,其上半箭头表示功率的流向,构成功率的2个变量分别写在直线的两侧,其中e为势变量,f为流变量,在键的一端加一短画,表示势的方向,另一端表示流的方向.向着元件的一端是因,离开元件的一端是果.
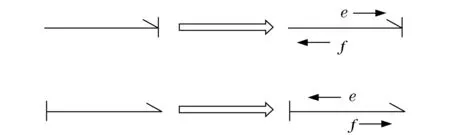
图1 键的因果关系表达法Fig.1 Express of the causality in bond graph
在键合图中,描述系统的各种物理参量可以统一地归纳成4种广义变量,即势变量e(t)、流变量f(t)、动量p(t)和变位q(t).要实现机械系统的功能要求,对于具体元件则对应不同的能量范畴,分别用阻性元件R、容性元件C及惯性元件I将这些元件有机地结合起来,通过变换器TF、回转器GY、共势节点“0-”及共流节点“1-”描述其物理系统的能量转换.表1为键合图的基本元件.

表1 键合图的基本元件
采用键合图理论及仿真方法,可以快速地、清楚地了解系统在不同状态条件下内部各部分状态变量的变化过程,从而反映出该系统的性能及动态特性.进行系统动力学分析时,键合图方法简单、准确,并有一定的步骤和规律.
与传统振动微分方程相比,键分图法可以方便、灵活地建立系统的状态方程和传递函数,能在复域、时域中对系统进行静态和动态特性的计算机仿真,不需要采用微分方程的转换和降阶处理.与有限元法和多刚体系统动力学相比,键合图方法在求解、分析过程中建模工作量小,计算方法简单,对计算机性能要求较少.此外,键合图法建立的模型便于修改和完善.由于键合图建模的多能域特性以及上述优点,使得键合图在复杂机械系统、液压、故障检测等多个领域得到了广泛而成功的应用,在工程系统动力学建模领域前景十分广阔.
2 RV减速器的键合图建模
2.1 RV减速器的结构及工作原理
RV减速器是由行星齿轮与行星摆线组成的两级大速比减速传动机构,其三维模型及结构简图如图2,3所示.高速级为渐开线齿轮组成的K-H型差动轮系,低速级为摆线齿轮组成的K-H-V型行星轮系.其传动特点是中心轮1作为输入,传给行星轮2,进行第一级减速.行星轮2与曲柄轴3固连,将行星轮2的旋转运动通过曲柄轴3传给摆线轮4,使摆线轮产生偏心运动.同时摆线轮4与针轮5啮合产生绕其回转中心的自转运动,此后又通过曲柄轴3传递给输出盘6实现等速输出转动.由于输出盘6也作为第一级行星齿轮传动的行星架,因此输出盘6的运动也将通过曲柄轴3反馈给第一级差动机构,形成运动封闭.这种闭环机构提高了整机的传动效率[3-4].
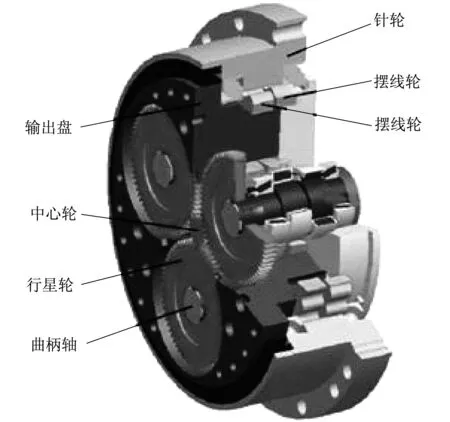
图2 三维模型Fig.2 Three-dimensional model

图3 RV传动结构简图Fig.3 Diagram of RV transmission
2.2 RV减速器的功率流分析
通过对RV减速器转矩及转速的分析,按功率P=MW,确定各构件所传递功率的正负号.正功率为单元的输入功率,负功率为输出功率.RV减速器系统的功率流向及分流情况如图4所示.
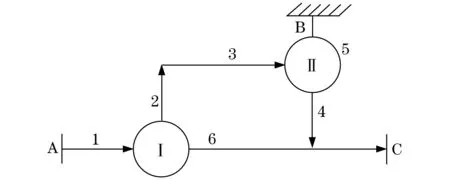
图4 系统功率流向及分流情况Fig.4 System power flow and distribution
输入功率P1在单元Ⅰ(K-H轮系)中分解为P2和P6两路传递,而P2再经单元Ⅱ(K-H-V轮系)传到行星架上,两股功率P4和P6汇合后由输出盘输出.由图4可看出,RV减速器属于功率分流型传动,系统内部没有循环功率,所以RV减速器的传动效率比较高.
2.3 键合图模型的建立
RV减速器键合图建模过程中的主要考虑因素为:输入轴的扭转刚度;太阳轮及行星轮的转动惯量、啮合刚度与啮合阻尼;曲柄轴的扭转刚度;摆线轮与针轮的啮合刚度及阻尼;行星架的扭转刚度及转动惯量.将齿轮啮合部位等效为弹簧原件及阻尼元件,弹簧刚度即为轮齿的啮合刚度齿轮的时变啮合刚度和阻尼系数,在键合图模型中分别用容性元I和阻性元R表示,取其平均值[5].根据RV减速器的工作原理和功率流向,对各键进行统一编号,键合图模型如图5所示.

图5 RV减速器键合图模型Fig.5 Bond graph model of RV reducer
图中:Sf1为输入的转速;C1为输入轴的扭转刚度;C2和R1为太阳轮与行星轮的啮合刚度和阻尼;TF1为第一级减速部分的传动比;I1,I2为太阳轮及行星轮的转动惯量;C3为曲柄轴的扭转刚度;I3是摆线轮的转动惯量;C4和R2为摆线针轮的啮合刚度及阻尼;TF2为第二级减速部分的传动比;I4,C5为输出行星架的转动惯量和扭转刚度.
3 系统动态特性仿真
采用键合图专用软件20-Sim建立仿真模型,对所建立的键合图模型进行动态仿真,得到输出转矩、转速及角加速度曲线,分析RV减速器的动态特性.
20-Sim软件是一款面向对象的建模和仿真平台,它的最大特点是可以实现基于键合图的自动建模与仿真.除此之外,还支持方块图、图标图、方程形式的建模.20-Sim的模型库中提供了大量预先定义好的模型,它允许用户直接从库中拖出实际系统中的元件图标,连接构成系统模型,操作非常简便.此外,20-Sim能将自己生成的模型转化成C代码输出,便于和别的程序接口,还可以将自己生成的模型转化成Functions,便于和Matlab接口.在20-Sim中,建立键合图模型后可以直接仿真,不用列写长串的状态方程组,也不用转化成方框图,减小了仿真的误差,大大提高了仿真效率[6-7].
3.1 仿真参数的确定
选择某一型号的RV减速器,主要参数如表2所示.表中:Z1为太阳轮齿数;Z2为行星轮齿数;Z3为摆线轮齿数;Z4为针轮齿数;n为输入转速.

表2 RV减速器的主要参数
根据RV减速器的参数和材料力学特性,由材料力学推荐公式来确定惯性元I和容性元C等参数.输入轴的扭转刚度K=2.9×104N·m·rad-1;太阳轮的质量为0.218 kg,转动惯量I1=0.29×10-4kg·m2;行星轮的质量为0.573 kg,转动惯量I2=0.55×10-3kg·m2;摆线轮的质量为6.46 kg,转动惯量I3=0.043 kg·m2;行星架的质量为14.35 kg,转动惯量I4=0.074 kg·m2.曲柄轴的扭转刚度K3=9.33×103N·s·rad-1,行星架的扭转刚度K5=7.9×104N·s·rad-1.轮齿的时变啮合刚度取平均值,渐开线齿轮啮合刚度K2=1.822×105N·m·rad-1,摆线轮啮合刚度K4=4.2×105N·s·rad-1;啮合阻尼为0.1 N·s·rad-1.
3.2 仿真结果分析
设置仿真时间为5 s,用Runge-Kutta-Fehlberg求解器进行求解,得到输出转速、转矩及角加速度随时间的变化曲线,如图6~8所示.

图6 输出转矩图Fig.6 Diagram of output torque
由图6知:输出转矩在0~1 s内逐渐增大,1 s后达到稳定状态输出.
由图7知:输出角速度在0~1 s范围内,大小随着输入轴角速度的增大而相应增大,且转动方向相同;当时间达到1 s后,角速度达到平稳,但在一定的数值附近有很小的波动,因为把系统各部件当弹性体考虑,以及各零部件之间的接触作用力造成了冲击与振动.
由图8知:角加速度在0.5 s时达到最大值,但是数值逐渐减小,由于第一级减速中太阳轮与行星轮啮合阻尼存在,在减速的过程中有能量的损耗.1 s以后达到平稳状态.由于RV减速器啮合过程中接触面间的接触力、接触面积不断变化引起的振动和冲击,使角加速度在0附近随时间变化的曲线呈现正弦形式的周期变化.

图7 输出转速图Fig.7 Diagram of output speed
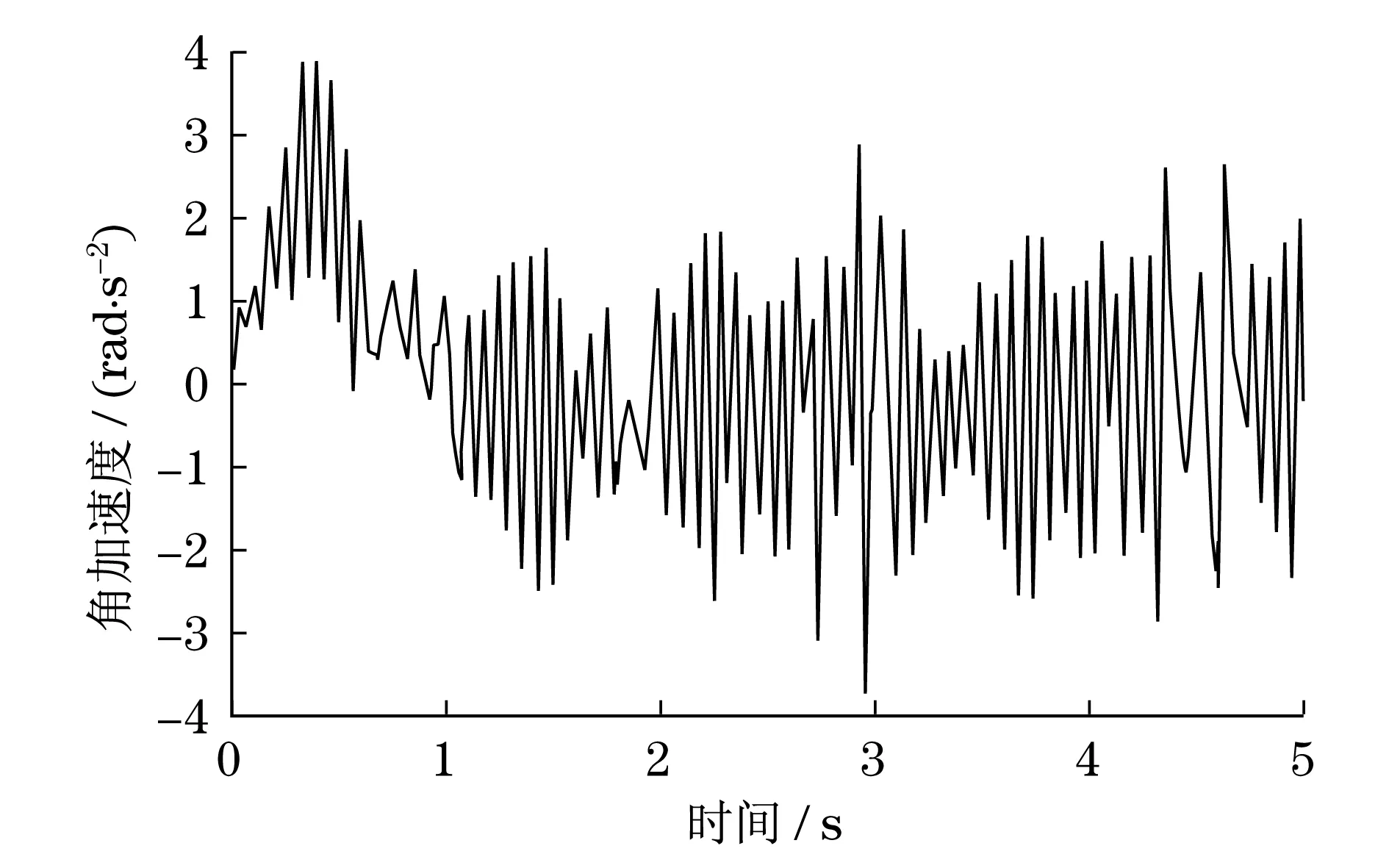
图8 角加速度图Fig.8 Diagram of angular acceleration
4 结论
(1) 本文基于键合图理论建立了RV减速器的键合图模型,并运用20-Sim软件进行仿真分析,验证了这种建模分析方法的可行性与优越性.
(2) 将键合图模型直接输入20-Sim中进行仿真,无需手工推导状态方程或转换为方块图,减小了仿真误差,提高了仿真效率.
(3) 由键合图方法得到的RV减速器动态仿真结果可以反映系统内部状态变量随时间的变化规律,从而可以定性地反映系统的动态特性.
[1] 任锦堂.键合图理论及应用:系统建模与仿真[M].上海:上海交通大学出版社,1992.
REN J T.Bond graph theory and application:the modeling and simulation of the system[M].Shanghai:Shanghai Jiao Tong University Press,1992.
[2] 王中双.键合图理论及其在系统动力学中的应用[M].哈尔滨:哈尔滨工程大学出版社,2007.
WANG Z S.Bond graph theory and its application in system dynamics[M].Harbin:Harbin Engineering University Publisher,2007.
[3] 袁敏.基于键合图理论的2K-H行星齿轮传动系统动力学分析[D].重庆:重庆大学,2006:13-15.
YUAN M.System dynamical analysis for 2K-H planetary gear transmission based on bond graph theory[D].Chongqing:Chongqing University,2006:13-15.
[4] 张洁.RV减速器传动特性分析[D].天津:天津大学,2012:6-9.
ZHANG J.Analysis on the transmission characteristic of RV reducer[D].Tianjin:Tianjin University,2012:6-9.
[5] 文明,谷中丽.履带车辆电传动系统键合图建模与仿真分析[J].车辆与动力技术,2003(4):41-45.
WEN M,GU Z L.Bond graph modeling and SIMULINK simulation of electric drive system for tracked vehicles[J].Vehicle and Power Technology,2003(4):41-45.
[6] 摆玉龙,杨志明.基于键合图法的仿真软件20-Sim[J].系统仿真学报,2007,19(22):5141-5143.
BAI Y L,YANG Z M.Simulation software 20-Sim based on bond graph methods[J].Journal of System Simulation,2007,19(22):5141-5143.
[7] 于春宇.履带起重机起升机构闭式液压系统仿真研究[D]..大连:大连理工大学,2008:38-45.
YU C Y.Simulation study on closed hydraulic system in hoisting mechanism of crawler crane[D].Dalian:Dalian University of Technology,2008:38-45.
Bondgraph modeling and simulation analysis on RV reducers
SHAN Lijun,YI Yongqiang
(School of Mechanical Engineering, Dalian Jiaotong University, Dalian 116028,Liaoning,China)
By considering the RV reducer system of elastic properties, the stiffness and damp between meshing teeth are first used for dynamic characteristics. Then, the system model was established and simulated. For traditional dynamics modeling, the physical process is difficult for characterization, while the state equation is hardly solved by mathematical methods. Hence, the bond graph theory can systematically avoid these weaknesses. Next, the bond graph model of RV reducers is analyzed based on 20-Sim software platform. Finally, it is shown from simulation results that the proposed model is a superior mathematical model for dynamic system characterization. Therein, this approach sets a theoretical basis on design and improvement of RV reducers.
bond graph theory; RV reducer; dynamic characteristics; simulation
国家自然科学基金资助项目(51375064)
单丽君(1966-),女,教授,博士.E-mail:slj@djtu.edu.cn
TH 132.46
A
1672-5581(2017)01-0031-05
