数控加工自动上下料机械手爪设计与仿真
2017-07-05刘飞飞孟得姣高堂盼
刘飞飞,孟得姣,高堂盼
(江西理工大学 a.电气工程学院;b.机电工程学院,江西 赣州 341000)
数控加工自动上下料机械手爪设计与仿真
刘飞飞a,孟得姣b,高堂盼b
(江西理工大学 a.电气工程学院;b.机电工程学院,江西 赣州 341000)
针对当前数控车床加工陶瓷过程中无法实现自动上料、下料的问题,设计了一种能满足陶瓷加工上下料要求的机械式手爪部件。首先,对陶瓷的加工工艺进行了分析,并结合其工艺要求对机械式手爪进行了结构设计;然后,利用ANSYS Workbench以及ADAMS对该机械式手爪进行了静力学和运动学仿真分析。研究了机械式手爪的抓力对陶瓷毛坯加工过程的影响,仿真结果表明:机械式手爪能很好地完成陶瓷毛坯自动抓取动作,验证了机械式手爪结构设计的合理性与准确性,对实际生产具有较大的指导意义。
陶瓷加工;机械式手爪;运动学仿真
0 引言
随着工业自动化的提高,自动化机器人被广泛应用到各行各业,并且深入到人类生活的各个方面[1-3]。它的使用不但提高了生产效率,也把工人从恶劣的工作环境中解脱出来。某工厂厂房车间数控机床加工绝缘子陶瓷时主要是依靠人工进行上下料,数控机床附近的工作环境非常恶劣,如图1所示。厂房内易产生大量粉尘并伴有严重的噪音,工人长期在这种环境下工作,会对其身体健康产生不利影响,而且使用人工装卸毛坯,效率非常低,因此,该工厂目前迫切需要解决这个问题。
为了解决该生产绝缘子陶瓷工厂所面临的问题,亦为了实现该工厂自动化无损坏抓取陶瓷毛坯,必须要设计一套符合于陶瓷毛坯抓取加工领域的机械手和配套夹具。现采用ABB机械手代替人手进行机械操作[4],为实现陶瓷毛坯工件自动化上下料操作为其设计了专用机械手爪装置。在抓取陶瓷毛坯材料的过程中,机械手用来代替人手进行材料的抓取与输送,这样机械手末端的设计更显得尤为重要。不但要求机械手爪能够精确牢靠抓取,而且要求被抓取物体的完整性也要重点考虑[5]。陶瓷毛坯材料为易碎材料,这样更要求手爪设计结构的合理性。手爪在抓取过程不但要精确抓取同时要对陶瓷毛坯材料进行保护。

图1 某陶瓷加工厂工人工作场景
1 机械手末端执行机构的设计
1.1 陶瓷上下料加工工艺过程
如图2所示为采用机械手爪抓取陶瓷毛坯加工工艺过程,主要由三个过程组成分别为抓坯过程、卸坯过程、复位过程。
抓坯过程:要求机械手爪能够灵活无损坏抓取陶瓷毛坯。首先利用传感器检测毛坯是否准确到达抓取位置,若到达手爪下落抓取陶瓷毛坯工件,然后手爪上升将陶瓷毛坯移至数控机床装夹工作台,将陶瓷毛坯装夹到数控机床上进行机械加工。
卸坯过程:数控机床加工完后,手爪抓取陶瓷毛坯工件运行到卸料区。要求机械手爪能够平稳的将加工好的毛坯卸下。
复位过程:机械手爪完成卸料后,上升至安全位置,机械手抓渐渐恢复到原来状态。复位完成并准备随时进行下一工位的操作。
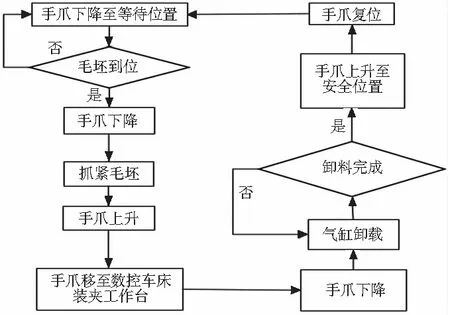
图2 机械手爪工作过程
1.2 基于Solidworks机械手爪模型的建立
末端执行器是直接接触陶瓷毛坯的工作部件,其基本结构设计取决于具体的工作对象和工作方式。因此,末端执行器的设计,要考虑多方面的影响因素。基于现场考察、陶瓷毛坯加工工艺流程、陶瓷毛坯加工精度等综合各方面的要求,利用Solidworks设计了一套符合该公司生产的机械手爪用来投入工厂生产输送线,如图3机械手爪模型所示,该手爪模型是用来直接抓握陶瓷毛坯的关键部件,由于被握持陶瓷毛坯是易碎工件,根据这种实际情况要求,设计采用夹钳式的手爪结构,夹钳式的手爪结构由爪子、传动机构和驱动装置等部分组成。目前大多数机械手爪采用电机驱动、气压驱动和液压驱动等传统的驱动方式,在所有的驱动方式中,气压驱动是最简单的,在工业上应用很广,气压驱动的工作介质是高压空气,气动控制阀简单、便宜,而且工作压力也低的很多。气动系统的主要优点之一是操作简单、易于编程,所以可以完成大量点位搬运操作的任务,气压驱动在所有机器人中是重量最轻的,其成本也最低,另外气压传动可以实现模块化组件形成任意复杂的系统,因此该机械手爪采用气压驱动。
机械手爪传动原理简图,如图4所示。该机构采用了双滑块的传动形式,在活塞推杆1的动力作用下推动三角板上下往复运动,双滑块采取对称布置各自的转动副分别于三角板2相连接,滑块又分别通过移动副与爪子相连接,爪子通过转动副与基座相连接。当三角板往复运动时,带动双滑块在爪子的导向内移动,爪子在滑块的动力作用下绕着基座转动,实现爪子的开合,爪子的开合就能使得对陶瓷毛坯的抓取与放下动作的实现。

图3 机械手爪模型图

图4 机械手爪结构简图
如图5为手爪抓取重物的结构简图,当气缸1上气阀打开通气时在气压的作用下是活塞推杆2动作。在活塞推杆2的作用下四杆机构动作,首先三角板3使得滑块7在滑竿4的方向下动作,然后下压爪子5使其牢牢抓取陶瓷毛坯,整个过程是实现机械手爪抓取工件的过程。反之,当下气阀打开通气时是手爪放下工件的过程。

1.气缸 2.活塞推杆 3.三角板 4.滑竿 5.爪子 6.陶瓷毛坯 7. 滑块 8.槽子 9.气阀图5 手爪抓取重物简图
2 机械手爪力学分析和运动学分析
2.1 机械手爪力学分析
机械手爪在进行操作时,其手指的夹持力N与气缸的气压压力P的比值称为机械手爪的传动比。机械手爪在抓取陶瓷毛坯时,由于陶瓷毛坯的体积和质量的不同,每次手指张开的范围也会不同,最终使得抓取时所需要的夹持力也是不同的[6]。由于抓取的陶瓷毛坯是易碎、易变形材料,必须选择合适的夹紧力,才能保证抓取物体时夹紧力不会对物体造成损伤,保持陶瓷毛坯的完整性。机械手爪受力简图如图6所示。

图6 机械手爪在竖直方向静止状态下受力分析图
从图6中可知,气缸对活赛推杆所产生的推力载荷为P,手爪夹紧力为N,陶瓷毛坯自身的重力为G,手爪对陶瓷毛坯支持力为F。连杆AB与水平方向的夹角为α,三夹板的夹角为β。
对O点进行受力分析,∑Fy=0,得:

(1)
对陶瓷毛坯进行受力分析,∑Fy=0,得:
F=2Nsinα+G
(2)
对铰支点A取矩,由力矩平衡条件得:
FCD·l=N·lAP
(3)
从而得到夹紧力N的大小与手爪对陶瓷毛坯支持力为F的大小:
(4)
其中:l为力FCD到铰支点A的距离;lap为夹紧力N到铰支点A的距离。由此公式可知,夹紧力的大小与气缸气压、三夹板的夹角β成正比,由此可以把夹持力的大小范围可以确定。
2.2 运动学分析
如图7所示,其中图7a是手爪初始状态,图7b是夹紧位置。为分析从气缸运动传递到爪子的运动传递关系,采用的气缸速度νA为恒定速度。假设定系是Oxy,O′x′y′是动系[7]。可知动系与定系之间的之间的坐标关系为:
(5)
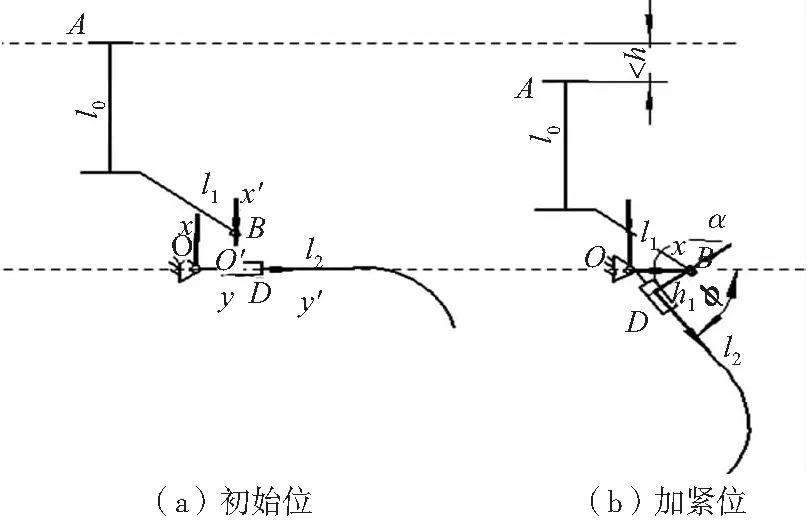
图7 杆件的连系关系简图
将动参考系固定在爪子上,滑块D为动点。显然动点D相对于爪子的运动为直线运动。因此滑块的运动轨迹为沿爪子方向的一段直线。相对速度νr和相对加速度ar,都沿爪子方向。至于牵连速度νe和牵连加速度ar,则是爪子与滑块D重合的那一点的速度合加速度。爪子绕支点O转动,因此,知道绝对速度νa为匀速的情况可知推杆下降的高度为h=νat。可得到相对速度与绝对速度分别为:
(6)
那么爪子的角速度:

(7)
lcd—支点到滑块的距离;lcp—爪子自由状态时支点到滑块的距离;lpd—爪子运动时所运行的距离。
lcd,lcp,lpd的单位为mm,ω的单位为rad/s。
又因为:φ=ωt,lcp自由状态趋于0时,可得:
ωt≈tanωt
(8)
这是一个超越方程,ωt不能直接表达,但有无数多个正根。这样可知角速度ω随时间t不断变化的过程。
那么爪子指尖的运动速度ν与滑块绕点B的角速度ωB分别为:
(9)
综上可知:爪子角速度ω随时间t不断变化的过程,从式(9)中可知气缸速度与爪子速度之间的传递关系。
3 机械手爪仿真分析
3.1 基于ANSYS Workbench机械手爪的结构分析
首先,通过Solidworks与ANSYS Workbench接口将机械手爪三维模型导入到AWE环境中,在“Engineering Data”设置好相关的材料属性,机械手爪各部分材料属性如表1所示[9]。其次,利用“mesh”功能对机械手爪进行网格划分。选择自由网格划分法,网格的疏密会直接影响计算结果精度,网格太疏会影响计算精度,网格太密又会使得计算时间过长,降低了效率。经过适当调整网格划分参数,确定了机械手爪有限元网格划分模型,机械手爪划分了153081个单元,306494个节点,其有限元模型分别如图8所示。
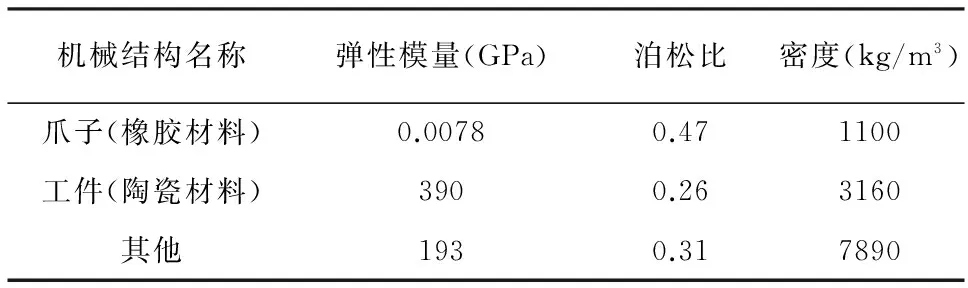
表1 手爪各结构的材料属性
然后,在静态应力前根据手抓的使用条件,对手抓的静平台设置固定约束。通过静力学分析的公式(4),可知在气缸荷载的作用下爪子所受力在80~100N之间,现在对爪子施加负载100N,经过有限元分析得到机械手爪的变形云图和等效变形云图如图9、图10所示。
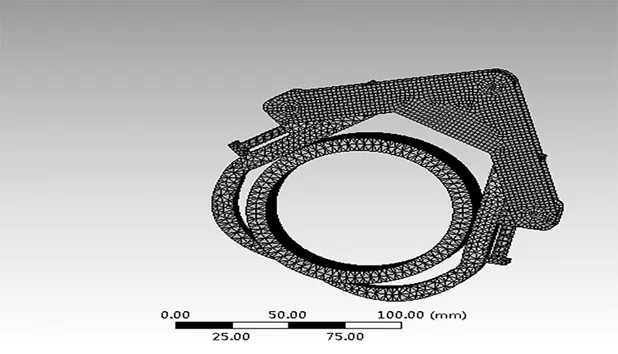
图8 机械手爪有限元模型

图9 机械手爪变形云图
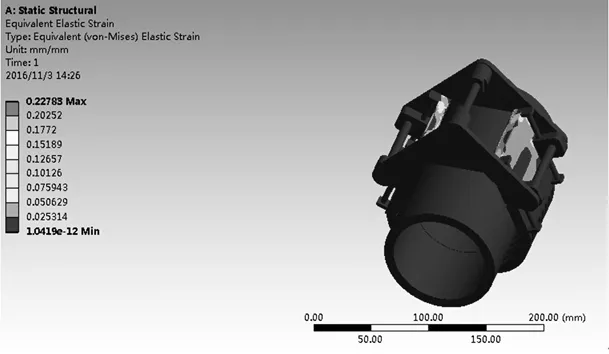
图10 机械手爪等效应变云图
从以上的分析结果可以看出,采用橡胶材料的爪子能够承受载荷。对陶瓷毛坯引起的变形非常小,整个机械手爪能够承受该机械载荷并能完成操作。
3.2 基于adams的运动学仿真分析
气缸的平均速度是气缸的运动行程L除以气缸的动作时间t。通常所说的气缸使用速度都是指平均速度。标准气缸的使用范围大多是50~500mm/s,故本方案采用气缸的速度为50mm/s。机械手爪准确抓取陶瓷毛坯的气缸运行的距离为60mm,运行时间为1.4s。
在Adams中进行机械手爪的运动学仿真,需要将装配体导入Adams中。分析该装配体,虽然复杂,但构件的数目并不多,实际上只包含四个构件:①爪子,②滑块机构,③推杆,④机架。把装配体中四个构件分别存为Parasolid格式的文件[8],然后依次导入Adams中施加约束,对该机构添加了九个转动副,五个滑动副,一个驱动约束。将“MOTION_1”的速度函数定义为“IF(time -1.5:-50,50,50)”,对机械手爪的抓取于放下陶瓷毛坯的过程进行仿真,仿真结果如图11、图12所示。
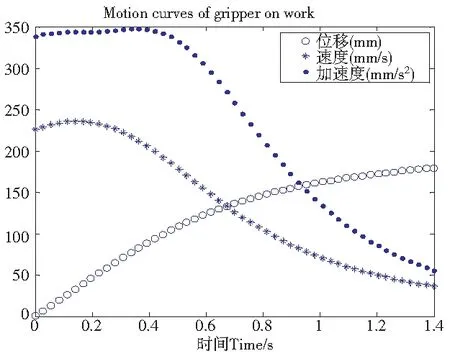
图11 爪子位移、速度和加速度曲线

图12 爪子角速度与角加速度曲线
图11表示函数曲线是在驱动作用下,机械手爪在全局坐标系X,Y,Z方向上的位移、速度、加速度曲线等运动学相关参数。结果表明,机械手爪的运动曲线平滑连续,无尖点、跳跃与间断,且位移曲线缓慢往下运动变化;速度曲线斜率变化的趋势,对应于加速度的变化;加速度曲线波峰(谷)值不高,加速度最大值相对较小。图12表示爪子角速度曲线斜率的变化的趋势,对应于角加速度的变化;角速度随时间变化的过程,变化较平缓无突变。根据仿真结果,系统在运动过程中,始终能够平稳变化,且无冲击、无振动,在整个运动过程中,机械手爪能够准确抓取陶瓷毛坯,完全符合设计要求,即机械手爪在行进过程中,爪子能够准确抓取陶瓷毛坯,并且通过平面四杆机构调节机械手爪重心始终处于平衡状态,能够保证抓取过程连续平稳行进。
4 结论
针对工厂陶瓷加工实现自动装夹的难题,设计了一套专用型手爪,并对其部分结构进行了静态分析,从分析结果可知爪子采用橡胶材料能够减小对陶瓷毛坯的冲击,陶瓷毛坯在载荷的作用下变形较小,采用此结构可以完成对陶瓷毛坯的抓取。又对整个机构建立了虚拟样机并进行了运动学仿真分析,从运动学分析结果中可以看出,机械手爪能够平稳抓取陶瓷毛坯。对推动机床上下料机器人的发展具有一定的意义。
[1] 陈婷婷.4R多关节轮毅加工上下料机械手的运动分析与研究[D].沈阳:沈阳工业大学,2012.
[2] 刘艳华,何高清,祖晅.柔性车削中心上下料机构设计和控制[J].组合机床与自动化加工技术,2012(7):96-102.
[3] 郑泽钿,陈银清,林文强.工业机器人上下料技术及数控车床加工技术组合应用研究[J].组合机床与自动化加工技术,2013(7):105-109.
[4] Nwokomah Wilson Gosim,Tarig Faisal.Pick and place ABB working with a Liner follower robot[J].ProcediaEngineering,2012(41):1336-1342.
[5] 孟彩茹,张高清,李夏楠,等.夹持机械手爪机构的设计与优化[J].机械设计与制造,2016(6):70-74.
[6] James A Fulton.Strategy for the integration of knowledge-basedenginner-ingdata[J].Boe-ing Information and Support Services Research and Techno-logy,1995.
[7] 罗志增,顾培民.一种单电机驱动多指多关节机械手的设计[J].机器人,2009,31(6):620-624.
[8] 宋少云,尹芳.ADAMS在机械设计中的应用[M].北京:国防工业出版社,2015.
[9] 朱大昌,李培,崔祥府,等.2RPU-2SPS全柔顺并联机构构型设计及刚度的研究[J].江西理工大学学报,2012,10(5):45-50.
(编辑 李秀敏)
Design and Simulation of Gripper for Automatic Loading and Unloading on CNC Machining
LIU Fei-feia,MENG De-jiaob,GAO Tang-panb
(a. School of Electrical Engineering and Automation;b.School of Mechanical and Electrical Engineering ,Jiangxi University of Science and Technology, Ganzhou Jiangxi 341000,China)
Aiming at the problem of automatic loading and unloading on NC machine tool processing ceramics.A kind of mechanical gripper part which can meet the requirements of ceramic processing and loading and unloading is designed.First of all, processing of ceramics is analyzed, and the requirements of the mechanical gripper was designed according to the process; then, the mechanical gripper of statics and kinematics simulation using ANSYS Workbench and ADAMS, effects of grip on the mechanical gripper for the ceramic blank processing process. The simulation results show that the mechanical gripper can finish the ceramic blank automatic processing movement, verify the rationality and accuracy of the design of mechanical gripper structure, has great guiding significance for the actual production.
ceramic processing;mechanical gripper;kinematics simulation
1001-2265(2017)06-0150-04
10.13462/j.cnki.mmtamt.2017.06.038
2017-01-08;
2017-02-08
刘飞飞(1962—),男,江西赣州人,江西理工大学教授,硕士研究生导师,博士,研究方向为高效节能矿冶机电装备及其智能化、矿冶生产过程模拟与控制,(E-mail)gzlff@126.com;通讯作者:孟得姣(1989—),男,山东菏泽人,江西理工大学硕士研究生,研究方向为机械工程,(E-mail)2862100628@qq.com。
TH122;TG65
A
