面向离散制造物联车间的UWB实时定位系统设计*
2017-07-05张成龙李少波陈伟兴
张成龙,李少波,陈伟兴
(贵州大学 a.大数据与信息工程学院;b.机械工程学院;c.现代制造技术教育部重点实验室,贵阳 550025)
面向离散制造物联车间的UWB实时定位系统设计*
张成龙a,李少波b,陈伟兴c
(贵州大学 a.大数据与信息工程学院;b.机械工程学院;c.现代制造技术教育部重点实验室,贵阳 550025)
离散型制造业生产过程复杂多变,制造资源具有更为广泛的动态特性,为进行有效的制造资源管理控制,实现制造物联车间实时位置数据的采集,基于制造物联事件主动感知技术架构,提出了一种离散制造物联车间资源定位管理模型,设计了一种基于超宽带技术的制造资源定位系统,改进了一种基于自适应阈值函数的小波阈值去噪算法并实现,能够有效降低外界因素的干扰,减少定位误差,实现对离散制造车间制造资源的实时定位,有效获取人员、物料、物流车辆等制造资源的位置数据,便于进行资源感知和调度管理,从而提升管理标准及产品品质。
超宽带技术;实时定位;离散型制造业;制造物联;信息系统
0 引言
制造物联[1-2](Internet of Manufacturing Things,IoMT)作为一种新型制造模式,高度集成与融合了电子信息技术、智能传感技术与先进制造技术,有利于制造过程的智能化提升和改造,促进“智慧制造”的实现。离散型制造企业具有产品品种多、工艺过程复杂、供应商和客户众多等特点[3],其生产过程复杂多变,原材料、设备、工装模具、场地、操作人员等制造资源具有广泛的动态特性,为进行有效的制造资源感知管理控制,保障企业安全生产,提高企业生产效率,推进离散型制造企业“智能化”发展,实时有效的生产数据位置信息采集变得十分必要。
传统的定位应用全球定位系统(GPS)受到制造车间场景限制、安装成本等因素影响,无法有效解决离散型制造车间定位问题。目前应用于离散型制造企业定位的技术主要有RFID定位技术、WIFI定位技术、Zigbee定位技术等,但是上述技术在制造车间环境电磁干扰和制造资源等障碍物影响下,存有定位精度偏低,实时性较差以及定位故障率较高等问题。
超宽带(Ultra Wide Band,UWB)技术具有功耗低、结构简单、高传输速率、不易被截获、高穿透性等优点[4],在变电站作业环境[5]、危险化学物品仓储[6]、矿井人员机车定位[7]等方面得到广泛应用,但是超宽带脉冲易受到噪声干扰,影响定位精度。为降低噪声影响,设计一种基于自适应阈值函数的小波阈值去噪算法,并基于数字信号处理器(Digital Signal Processor,DSP)实现数字滤波,更加精确、稳定、有效进行噪声去除。
离散制造物联车间实时定位系统设计以离散型制造车间资源位置信息的感知与传输为目标,基于离散型制造物联车间定位感知模型,进行感知系统设计,选取到达时间差(Time Difference of Arrival,TDOA)定位算法,基于DSP实现接收信号滤波处理,降低了信号强弱造成的影响,减弱了外界对其的干扰,使定位误差减小,填补了离散型制造企业高精度定位的空白。
1 离散型制造物联车间定位感知模型
1.1 离散型制造业现状分析
离散型制造企业产品形态复杂、产品种类多样、物料需求多样,决定了离散型制造企业生产计划的多变性、不可预测性;生产任务繁多、产品生产周期长、人员设备以及物料等制造资源具有广泛的动态特性导致生产过程管理控制水平较低,增加企业管理成本。
离散型制造企业自身特点决定了其产能与流程型制造企业不同,流程型制造企业主要由硬件设备产能决定,而离散型制造企业其产能主要以软件决定。因而离散型制造企业有必要通过软件方面的改进来提高加工要素的配置合理性,从而提升企业竞争力挖掘潜力。
1.2 离散型制造物联车间资源定位架构
离散型制造企业目前存在的主要问题包括:实时制造信息采集技术落后;生产过程实时监控能力薄弱;生产现场管控水平低下;生产数据共享与反馈机制不灵活等。
针对离散型制造企业现存问题,通过制造物联技术实现生产车间自动控制设备和制造执行系统的互联,对企业生产过程人机、物料、生产计划及任务执行情况和在制品质量信息等数据进行实时采集,并与企业管理信息系统进行交互,实现信息数据的协同应用,提出了如图1所示的制造物联事件感知技术架构。
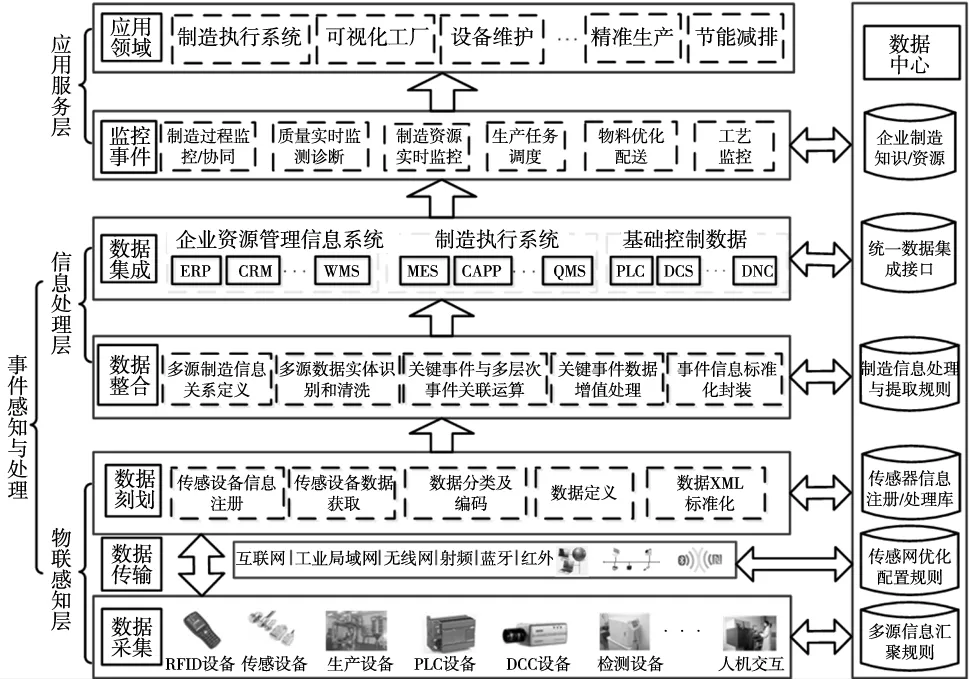
图1 制造物联事件主动感知技术架构
以基于UWB的智能车间定位数据采集终端为平台,提出了如图2所示的离散型制造物联车间定位感知模型,针对制造物联车间制造资源进行有效的标签匹配,实现对生产车间制造资源的实时定位数据进行全面采集分析,并与企业资源管理系统、车间制造执行/控制系统进行数据集成。通过采集有效的实时定位信息,完善制造数据的完整性,加强对制造数据的管理及业务应用,达到对制造过程进行事件预测、监控与分析,为生产管理者提供决策依据。

图2 离散型制造物联车间定位感知模型
2 系统结构与工作原理
离散型制造物联定位系统结构主要由硬件系统和软件系统两部分组成。其中硬件系统主要包括标签、读写器、本安型不间断电源、网络通信设备、管理服务器和终端,用于识别和采集车间人员、物料等制造资源的位置信息,并将采集到的数据信息通过有线通信网络传送到定位软件系统进行分析和处理。软件系统主要用来进行数据采集、处理、展示和存储,并通过数据集成接口与企业资源管理系统、车间制造执行/控制系统进行数据传输,便于车间管理人员通过软件的图形界面或文字列表直观了解到制造资源的活动范围,确定制造资源位置信息。制造车间环境下电磁干扰较强,而且数据采集点分布范围很广,根据这些实际情况,从系统的可靠性、实时性和可扩展性出发,本文提出了基于UWB技术构建车间制造资源定位系统,其总体结构如图3所示。

图3 UWB系统组成与网络结构
2.1 UWB系统组成
UWB技术,是一种无载波、时间间隔纳秒级甚至微秒级的通信技术,利用的非正弦波窄脉冲传输数据。具备功率低、抗干扰性能强、传输速率高、存储容量大、多径分辨能力强、安全性高等优势。为实现离散型制造车间资源精准定位,本文设计定位系统主要构成如下:
(1)UWB定位标签
UWB定位标签作为信息交互的载体由脉冲元件和芯片组成,标签具有唯一的ID用来标识车辆、设备、人员等制造资源。
(2)定位基站
定位基站由接收天线和Reader两部分组成,其中Reader包含信号接收器、DSP、定位测量电路和网络通讯设备,通过接收UWB标签发出的脉冲信号,进行DSP滤波处理,采用TDOA算法,来确定标签的位置,并将数据传输至计算机系统。
(3)同步控制器
同步控制器用来连接定位基站和以太网完成对整个制造车间定位网络协调控制,将Reader接收的TDOA数据包发送到定位服务器,使定位基站和定位服务端协同工作,保障定位网络的实时有效性。
(4)定位服务器
定位服务端是将通过同步控制器接收的TDOA数据包进行处理分析,来确定标签的位置,将标签位置实时的显示在系统界面上。
2.2 工作流程
系统工作具体流程如图4所示,标签进入定位网络后接收到同步控制器发出的标识信号被唤醒,接收工作信号进入工作状态,实时发出UWB信号,Reader通过天线接收到标签发出的信号首先进行滤波处理,然后将不同信号的到达时间做处理,产生时间到达差数据包,数据包通过网线传到同步控制器中,最终定位服务端通过同步控制器发送的数据包来计算确定标签的位置。

图4 系统工作具体流程图
3 DSP滤波算法设计
UWB技术抗多径干扰能力强的优势可以在一定程度上提高网络的可靠性,但是信号发送接收过程中极易受到噪声影响,从而降低实时定位精度。DSP作为专用的数字信号处理器,其接口简单、易于集成,能够实现复杂的算法运算,高速实时完成数字信号处理[8]。本文设计定位系统充分利用DSP精度高、稳定性高、运行速度快的优越性能,通过TMS320VC5416芯片实现一种基于自适应阈值函数的小波阈值去噪算法,针对定位基站接收的UWB信号进行滤波处理,降低了制造车间环境下噪声对UWB信号影响。
3.1 改进小波阈值去噪算法
小波变换在时域和频域具有良好的局部化特性,通过小波变换进行信号噪声去除,能够最大限度地保留原始信号中的有用部分[9]。在诸多经典小波变换去噪方法中,小波阈值去噪法因为其具有实现简单、计算量小且降噪效果好等特点得到广泛应用[10]。其中,小波阈值去噪主要流程如图5所示。
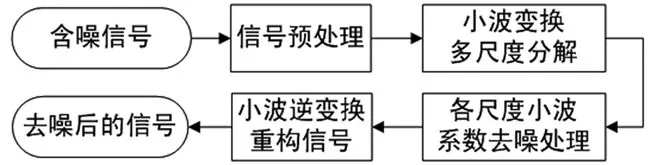
图5 小波阈值去噪流程图
小波阈值去噪算法的关键是:选取最合适的小波基;确定最优小波分解层数;根据相应准则准确的估计阈值;选取合适的降噪准则。其中阈值和降噪准则的选取直接关系到算法去噪的品质。
(1)改进的阈值
针对通用阈值固定,不能随着分解层数变化的缺点,提出一种改进的阈值选取方式以弥补其不足,新阈值自适应性强,更加符合实际情况下噪声在各层的分布,新阈值如下:

(1)
式中,σ是噪声的标准方差,N是信号长度,j代表分解尺度。
(2)改进的阈值函数
传统阈值函数存在不连续性、存在恒定偏差、算法复杂度高等缺陷和不足影响重构信号的精度。
为克服传统阈值函数的不足,提出一种具有自适应能力的阈值函数,如式(2)所示。
(2)
3.2 改进算法仿真验证
实验平台为Win10/MATLAB(R2010b),所用计算机配置为:Intel(R) Core(TM) i3-3240 CPU @3.40GHz,4.00GB RAM,64位操作系统。
3.2.1 设计算法描述
改进的小波阈值去噪算法描述如下:
(1)信号小波分解:
①选择合适的sym8小波基;
②确定分解层次N为6;
③进行分解计算。
(2)小波分解高频系数的阈值量化:
①选择本文改进阈值式(1);
②选择本文改进阈值函数式(2)。
(3)小波重构:根据小波分解的系数进行小波重构,以便恢复原始信号。
3.2.2 算法对比分析
实验流程描述如下:
①随机产生原始信号;
②针对①中产生原始信号中加入噪声,生成含噪信号;
③针对②中含噪信号进行噪声去除,选取本文设计算法与文献[11]算法进行对比实验;
④实验结果分析。

图6 实验结果对比
实验结果如图6表明:本文算法与文献[11]中算法对比重构信号更加光滑,更高程度保留了原始信号的细节信息,算法更具有优越性。
4 系统功能实现与测试
4.1 系统实现
面向离散制造物联车间的UWB实时定位系统是以Visual Studio 2015为开发平台,C#为编程语言,基于地理信息系统(Geographic Information System,GIS)来进行定位场景构建,系统的开发包括界面、数据库以及具体功能的设计与实现。其中功能模块主要分为信息管理模块、实时定位模块、管理调度模块以及在岗追踪模块,可视化显示采集的实时定位信息,并成功应用于某高校制造物联实验室,其中部分系统应用界面如图7所示。

图7 部分系统应用界面
4.2 系统性能测试
定位精度与信号延时信息是评价UWB定位系统性能的关键,但是在实际应用场景下,无法通过有效的测量方式获取位置信息与所设计系统定位信息进行对比评价。
为进行设计系统性能评价,将20个定位标签随机置放于实验环境内,通过数据库获取定位标签在2016年8月27日11时18分至2016年8月27日11时19分之间的产生的位置坐标信息,共计1218条。其中数据库中部分定位标签信息如表1所示。

表1 部分定位标签数据
测试流程:
(1)读取数据库中测试时间段内定位标签坐标信息,并按照不同标签ID进行分类;
(2)计算不同ID标签平均位置坐标(x,y);
(3)计算同一ID标签所有位置坐标与平均位置坐标(x,y)的方差s2;
(4)计算定位标签位置坐标更新频率f;
(5)结果分析。
通过计算得出s2=0.098,f=1.015,即设计系统定位坐标较为稳定且具有较快的定位频率生成位置坐标。
5 小结
本文在提出离散制造物联车间资源定位感知模型基础上,进行了一种基于UWB的制造资源定位系统设计,提出并应用了一种基于自适应阈值函数的小波阈值去噪算法,设计系统通过UWB无线定位接收器获取人员位置信息,车间管理人员通过软件的图形界面或文字列表直观了解到制造资源的活动范围,确定了制造资源位置信息,完善了制造数据的完整性。
[1] 姚锡凡,于淼,陈勇,等. 制造物联的内涵、体系结构和关键技术[J]. 计算机集成制造系统,2014,20(1):1-10.
[2] 侯瑞春,丁香乾,陶冶,等. 制造物联及相关技术架构研究[J]. 计算机集成制造系统,2014,20(1):11-20.
[3] 贺长鹏,郑宇,王丽亚,等. 面向离散制造过程的RFID应用研究综述[J]. 计算机集成制造系统,2014,20(5):1160-1170.
[4] Chehri A, Fortier P, Tardif P M. UWB-based sensor networks for localization in mining environments[J]. Ad Hoc Networks, 2009, 7(5): 987-1000.
[5] 周刚. 基于UWB定位的变电站作业安全监控技术研究[J].中国安全生产科学技术,2016,12(8):125-129.
[6] 戴波,李志超,刘学君,等.基于泰森多边形的UWB危化品堆垛仓储货物定位技术[J]. 化工学报,2016,67(3):878-884.
[7] 孙继平. 矿井宽带无线传输技术研究[J]. 工矿自动化,2013,39(2):1-5.
[8] 薛梅,夏长亮,王慧敏,等. 基于DSP的开关磁阻电机磁链特性检测与神经网络建模[J]. 电工技术学报,2011,26(2):68-73.
[9] He Q, Wang X, Zhou Q. Vibration sensor data denoising using a time-frequency manifold for machinery fault diagnosis[J]. Sensors, 2013, 14(1): 382-402.
[10] Jia L, Sun Z, Chen Y, et al. The application of wavelet transformation in pulsar signal denoising[C]//Transportation, Mechanical, and Electrical Engineering (TMEE), 2011 International Conference on. IEEE, 2011: 2480-2483.
[11] 吴光文,王昌明,包建东,等. 基于自适应阈值函数的小波阈值去噪方法[J]. 电子与信息学报,2014,36(6):1340-1347.
(编辑 李秀敏)
Real-time Positioning System Based on UWB Design for Discrete Manufacturing Group Workshop
ZHANG Cheng-longa,LI Shao-Bob,CHEN Wei-xingc
(a.College of Big Data and Information Engineering; b.School of Mechanical Engineering;c.Key Laboratory of Advanced Manufacturing Technology, Ministry of Education, GuiZhou University, Guiyang 550025, China)
The manufacturing process of discrete manufacture is complex and varied, manufacturing resources have a wider dynamic characteristics, in view of control management manufacturing resources effectively, realization gathering real-time location data of IoMT-based workshop, A management system of resources-locating for IoMT-based discrete plant was established based on an active perception technical framework of manufacturing data, and designed a positioning system for Manufacturing resources based on UWB, improve a wavelet threshold de-noising algorithm based on adaptive threshold function and realized, can reduce the interference of external factors effectively, reduce the error of positioning, and could gathering real-time location of IoMT-based workshop, access the location of the manufacturing resources effectively, such as the staff, material, logistics vehicles, convenient for awareness and scheduling management, Finaly improve the management standard and product quality.
UWB; real-time positioning; discrete manufacturing; IoMT; information system
1001-2265(2017)06-0086-04
10.13462/j.cnki.mmtamt.2017.06.022
2016-08-27;
2016-09-30
国家自然科学基金(51475097);工信部智能制造示范项目(工信部联装[2016]213号);贵州省重大基础研究(黔科合JZ字[2014]2001)
张成龙(1992—),男,山东枣庄人,贵州大学硕士研究生,研究方向为数字通信与信息系统,(E-mail)995010174@qq.com。
TH122;TG506
A
