永磁悬浮回转系统的回转特性研究
2017-07-05金嘉琦
韦 伟,金嘉琦,孙 凤,佟 玲
(沈阳工业大学 机械工程学院,沈阳 110870)
永磁悬浮回转系统的回转特性研究
韦 伟,金嘉琦,孙 凤,佟 玲
(沈阳工业大学 机械工程学院,沈阳 110870)
针对一种永磁悬浮回转系统的回转特性进行分析。介绍了永磁悬浮回转系统的结构和铁球的回转原理,并在此基础上用实验验证回转的盘状永磁铁的磁场特性和铁球表面的磁化特性。将盘状永磁铁布置成三种不同的方式,通过对比分析铁球的回转速度来验证影响其回转特性的因素,以得到永磁铁的相对最优布置方式。上述研究及结果为永磁悬浮回转系统的进一步实验验证提供理论基础及参考。
永磁悬浮;回转特性;回转驱动;仿真
0 引言
随着新型永磁材料的发展,单位体积的磁能大幅度提高[1],并由于其无噪声、低能耗的优越性能,在电机、电讯、电声器材、磁力仪器、医疗器械、自动化设备和计算机等领域广泛应用[2]。
磁悬浮技术作为一种迅速发展的技术,具有长寿命、无污染、无噪声、低能耗、不受任何速度限制、安全可靠等优点[3],不仅应用于磁悬浮列车[4],而且在磁悬浮轴承、磁悬浮飞轮储能、磁悬浮精密平台、磁悬浮冶炼等方面也被广泛应用[5-8]。随着永磁材料应用于磁悬浮技术,国内外研究学者对永磁悬浮系统进行了深入研究。张钢等人[9]对一种六磁环五自由度被动全永磁轴承系统进行理论分析,并探究了被动全永磁轴承系统可以实现动态稳定悬浮的可能性。张海龙等人[10]提出了2种永磁悬浮直线导轨平台的方案,并利用Ansoft Maxwell磁场有限元分析软件进行了平台承载能力和刚度的计算分析。金俊杰等人[11]采用两对双列对称布置的非接触主动永磁悬浮支承,构建了四点支承的永磁悬浮传送装置,应用LQR控制方法仿真分析未解耦系统的悬浮特性,并采用反馈解耦控制策略对系统进行解耦控制仿真。王伟明等人[12]提出一种磁悬浮平台,该平台下附着4个永磁阵列和定子线圈,构成四个磁悬浮电机,磁悬浮电机同时提供垂直悬浮力和水平驱动力,可实现平台x、y方向运动与改变悬浮高度。
在永磁悬浮系统的基础上,进一步对悬浮物的回转运动进行控制。刘蕾等人[13]提出了一种轴向磁场结构的驱动装置,该驱动装置通过在驱动绕组中通入三相交变电流产生周向运动的旋转磁场,与其在磁悬浮球中感应出的涡流相互作用产生驱动力矩,实现对磁悬浮球的旋转运动;刘洋等人[14]在分析磁悬浮球控制原理的基础上,不仅实现对重为1kg的小球稳定悬浮,而且使其以可变速度绕轴线旋转;水野毅等人[15]提出一种用于测量悬浮物位置的风机系统,该系统由八个上下差动控制的电磁铁组成,悬浮物的旋转在控制信号中叠加两相AC信号来实现,可实现悬浮物的稳定悬浮与旋转。
作者已提出一种永磁悬浮回转系统,分别用直线运动式[16]和磁铁回转式[17]测量回转永磁体的磁化特性,验证悬浮物的回转特性。本文提出了一种永磁悬浮回转系统,并阐述其回转的结构和原理,利用高斯计对铁球和永磁铁的磁场特性进行测量,同时分别对三种驱动磁铁的布置方式进行回转速度的研究分析,从而得到控制系统回转特性较优的布置方式。
1 永磁悬浮回转系统的结构与控制方法
永磁悬浮回转系统的结构如图1所示。该旋转系统包括两个部分:悬浮部分和回转部分。悬浮部分由音圈电机驱动柱形永磁铁来实现铁球的上下悬浮,回转部分是通过四个直流伺服电机来控制四个盘状永磁铁的旋转角度,以实现铁球的回转运动。

图1 永磁悬浮回转系统的结构图
1.1 悬浮部分
悬浮部分的结构如图2所示。柱形永磁铁位于音圈电机输出轴上,音圈电机工作带动永磁铁上下移动,滑块与传感目标也随之移动。上侧的电涡流传感器测量音圈电机输出轴的位移,即柱形永磁铁的位移,下侧的电涡流传感器测量铁球的旋转角度。永磁铁的位移信号和铁球的旋转角度信号经过A/D转换后,由dsPACE控制器和PD控制方法来控制系统,以确保铁球的稳定悬浮。

图2 悬浮部分的结构示意图
1.2 回转部分
回转部分的结构如图3所示。盘状永磁铁固定在直流伺服电机的输出轴上,电机安装在系统的框架上,由电机驱动永磁铁实现永磁铁在竖直方向上和水平方向上的移动和转动。永磁铁的旋转角度由电机编码器记录,通过编码器接口将信号反馈到DSPACE控制器,用PD控制方法来控制电机的旋转角度,实现四个永磁铁与铁球在同一水平面上,并以相同的旋转速度进行旋转。

图3 回转部分的结构示意图
1.3 PD控制器
PD控制器的控制框图由图4所示。将永磁体Ⅰ(永磁体的编号见图5)的旋转角度作为永磁铁Ⅱ、Ⅲ、Ⅳ的参考角度,经PD控制器计算后,控制电机的输出转角,永磁铁Ⅱ、Ⅲ、Ⅳ的旋转角度是由永磁铁Ⅰ的旋转角度与其PD控制器所计算出的旋转角度之和,并与实际旋转角度作差所得到的最终值来实现电机的旋转角度控制。
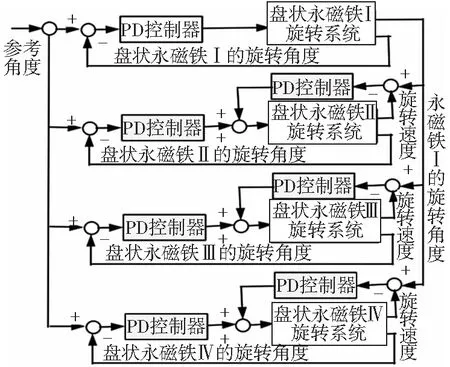
图4 PD控制器的控制框图
2 回转原理
系统的回转原理如图5所示,该图为系统的俯视图。铁球与四个永磁铁位于同一水平面上,且置于四个永磁铁的中心。每个永磁铁在径向方向上磁化,磁极平行布置,且同极相对。四个永磁铁旋转方向一致,并保持同一个相位关系,实现四个永磁体以相同的速度旋转或停止。

图5 系统的回转原理图
铁球表面上磁点S的位置决定铁球的旋转角度。当四个盘状永磁铁同向旋转时,铁球绕其纵轴旋转,永磁铁Ⅰ吸引S点,S点向永磁铁Ⅰ方向转动,当S点距离永磁铁Ⅰ最近时铁球停止旋转。此时,S点正对于磁铁Ⅰ,铁球旋转90°,四个永磁铁同时旋转90°。当四个永磁铁继续旋转时,永磁铁Ⅱ吸引磁点S,S点朝向永磁体Ⅱ方向转动。由此表明,四个盘状永磁铁的旋转,磁场的变化使得铁球以反方向、同速度进行自转。
3 回转特性分析
3.1 永磁铁的回转特性
为了验证盘状永磁铁的回转特性,使用高斯计测量盘状永磁铁的磁通密度。当永磁铁旋转时,分别记录铁球与高斯计的距离为20mm、30mm、50mm、70mm和100mm时的磁通密度。实验数据如图6所示,盘状永磁铁的磁通密度曲线类似于正弦曲线。由此表明,铁球表面磁通密度的影响呈周期性变化,永磁铁与铁球距离越近,所产生的磁通密度越大,磁力越大。

图6 盘状永磁铁的磁通密度特性
3.2 铁球的磁通密度分析
测量铁球表面剩磁大小的实验装置如图7所示,本实验使用高斯计置于铁球的任意一侧,来测量铁球的磁通密度。首先,铁球静止时,铁球与高斯计距离最近的点,即为铁球表面的最大磁化点;其次,铁球固定于铝管的顶端,测得最大磁化点的位置位于铁球的顶部;最后,标记铁球的经度线,每隔5°测量一次铁球的磁通密度,并标记于经度线上。

图7 实验设备图
铁球表面的磁通密度如图8所示,外圆的磁通密度为1mt,内圆的磁通密度为-1mt,中心点的磁通密度为-1.5mt,纬线度数由外圆至中心依次为60°、30°、0°、-30°和-60°,磁通密度由外圆至中心依次递减。实验结果表明:不同位置的磁通密度是不同的,最大的磁通密度点为0°纬线与195°经线的交点,其值为-1.16mt。

图8 铁球表面的磁通密度分布图
4 基于MATLAB的仿真结果
将四个盘状永磁铁分为三种配置方式:①只使用永磁铁Ⅰ作为驱动磁铁;②使用永磁铁Ⅰ、Ⅲ作为驱动磁铁;③使用四个永磁铁作为驱动磁铁。利用MATLAB的仿真软件,对永磁悬浮回转系统进行铁球速度的阶跃响应、铁球回转的稳态速度以及驱动磁铁的输入速度和铁球输出速度的关系进行分析。铁球的转速没有反馈到控制系统中,即旋转系统是一个开环系统。仿真参数见表1。
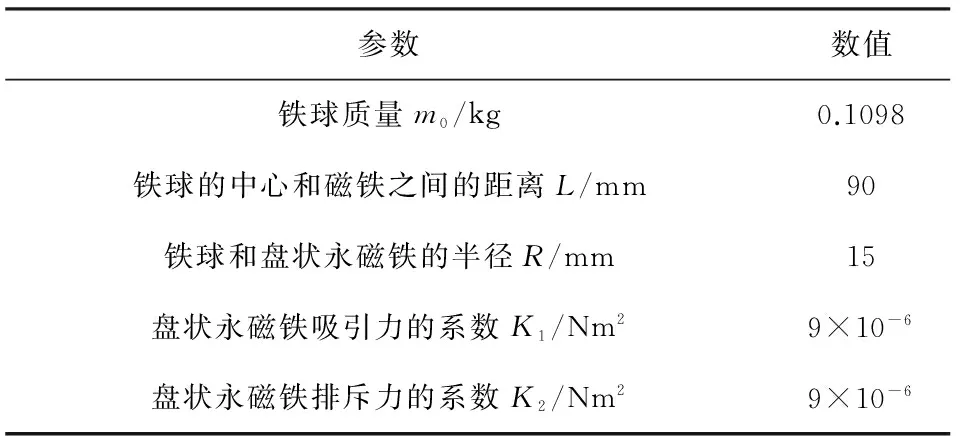
表1 仿真参数
4.1 系统的速度阶跃响应分析
在上述模型中,对三种驱动永磁体配置方式进行了速度的阶跃响应分析。
永磁铁的阶跃信号和铁球的阶跃响应结果如图9所示。仅使用磁铁Ⅰ时,当输入阶跃信号时,铁球向磁铁旋转的反方向转动,并引起振动;使用磁体Ⅰ和Ⅲ铁球时,铁球的速度响应快,同时也存在振动,铁球的速度可以反映出磁铁的速度;使用所有的磁铁时,铁球的速度呈周期性变化,存在振动,且振幅和周期远小于前者。因此,磁铁的数量越多,铁球的反应速度越快,且振动相对变小,呈周期性变化。

(a)永磁铁的阶跃输入

(b)永磁铁Ⅰ作为驱动磁铁

(c)永磁铁Ⅰ和Ⅲ作为驱动磁铁

(d)四个永磁铁作为驱动磁铁
4.2 系统的稳态速度分析
由于铁球在悬浮时存在振动,所以,对三种驱动永磁体配置方式进行了速度的稳态分析。
盘状永磁体Ⅰ的速度约为0.5 r/s时,模拟铁球在稳定状态时的旋转速度,如图10所示。明显看出,铁球的速度均为0.5 r/s,但是前两种配置方式的铁球速度波动较大。因此,四个永磁铁驱动铁球旋转时的运动速度比另外两种情况更稳定。
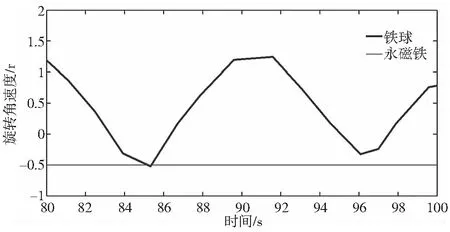
(a)永磁铁Ⅰ作为驱动磁铁
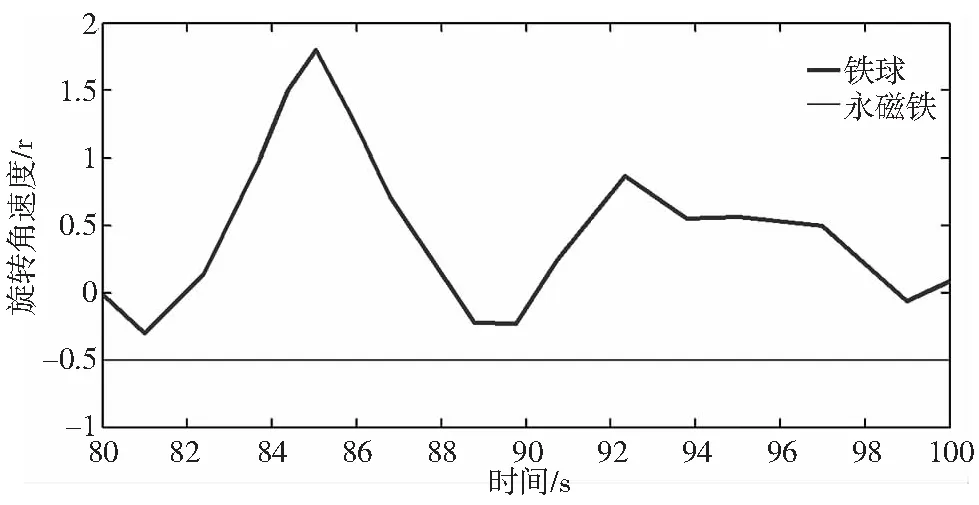
(b)永磁铁Ⅰ和Ⅲ作为驱动磁铁

(c)四个永磁铁作为驱动磁铁
4.3 输入速度与输出速度的关系
为了检验永磁铁的输入速度和铁球的输出速度之间的关系,对永磁体的速度施加斜坡信号,如图11所示。
只使用永磁铁1作为驱动磁铁时,铁球的速度与磁体的速度呈上升趋势,但曲线存在波动;使用永磁铁I和III作为驱动磁铁时,曲线趋势与前者类似,但曲线的波动很大,速度变化快;使用四个永磁铁作为驱动磁铁时,梯度约为1,铁球的速度和磁铁的速度相差不大,且曲线波动较小。因此,驱动磁铁数量越多,输入速度和输出速度之间的速度波动越小,悬浮越稳定。

(a)永磁铁Ⅰ作为驱动磁铁

(b)永磁铁Ⅰ和Ⅲ作为驱动磁铁

(c)四个永磁铁作为驱动磁铁
5 结论
本文对永磁悬浮回转系统的回转特性进行研究:
(1)介绍本系统的结构以及铁球的回转原理,通过对柱形永磁铁的高度控制和四个盘状永磁铁的旋转控制,可对悬浮球的悬浮以及旋转角度进行控制;
(2)用实验验证永磁铁和铁球的回转特性,实验结果表明:永磁铁磁通密度的影响呈周期性变化,永磁铁与铁球距离越近,产生的磁力越大;铁球表面不同位置的磁通密度是不同的,最大的磁通密度点为0°纬线与195°经线的交点,其值为-1.16mt。
(3)对三种永磁铁驱动的配置方式进行仿真,仿真结果表明:驱动磁铁的数量增多,可提高系统的响应,铁球的旋转越稳定,并且磁铁的输入速度和铁球的输出速度之间的线性度相对提高。使用四个永磁铁作为驱动磁铁时,系统的回转特性最优。
[1] 杨金波,韩景智,刘顺荃,等.新型永磁材料的研究[J].中国科学:物理学力学天文学,2013,43(10):1188-1205.
[2] 陈贵荣,李云钢,程虎.钕铁硼永磁材料性能测试技术研究[J].稀土,2007,28(6):98-101.
[3] 孙凤,李清,金俊杰,等.可变磁路式永磁悬浮系统模型辨识与分析[J].组合机床与自动化加工技术,2015(7):87-90.
[4] 赵建华,张为民,邱玮.采用模式搜索法对磁悬浮列车轨道梁的加工实现精确定位[J].组合机床与自动化加工技术,2007(12):32-34.
[5] F Matsumura,Y Okada,T Namerikawa.State of Art of Magnetic Bearings[J].JSME International jour-nal,1997(40):43-45.
[6] 王念先,胡业发,吴华春,等.大气隙混合磁悬浮轴承承载力模型的研究[J].机械工程学报, 2015,51(1):153-160.
[7] 刘超,刘刚,盖玉欢.基于磁力等效原理的刚性磁悬浮转子系统高精度在线动平衡[J].振动与冲击, 2016, 35(4):67-71.
[8] 蓝益鹏,张武,张凤阁.直接磁悬浮永磁直线电动机运行机理研究[J].制造技术与机床, 2012(3):41-44.
[9] 张钢,孟庆涛,钟永彦,等.五自由度全永磁轴承系统的稳定悬浮特性分析[J].机械工程学报,2015,51(5):56-63.
[10] 张海龙,张坚,孟庆涛,等.基于Ansoft的永磁悬浮直线导轨平台的设计及磁力分析[J].轴承,2014(5):12-15.
[11] 金俊杰,段振云,孙凤,等.永磁悬浮无尘传送系统的悬浮特性及解耦控制仿真分析[J].中国机械工程,2016,27(4):518-525.
[12] 王伟明,马树元,闪明才,等.磁悬浮运动平台的非线性变结构控制[J].组合机床与自动化加工技术,2012(3):69-72.
[13] 刘蕾,徐龙祥.实现磁悬浮球旋转的驱动装置分析[J].机械设计与制造,2013(7):4-6.
[14] 刘洋,范瑜.磁悬浮球旋转控制系统[J].自动化技术与应用,2003,22(9):42-44.
[15] Takeshi Mizuno,Munehiro Furutachi,Yuji Ishino,et al.Proposal of Wind Tunnel for Spinning Body using Magnetic Suspension[J].The Twelfth International Symposium on Magnetic Bearings,2010,8:232-236.
[16] F Sun,K Oka.Noncontact Spinning Mechanism Using Rotary Permanent Magnets[J].IEEJ Transactions on Industry Applications,2010,130(7):913-919.
[17] F Sun,K Oka,A Tsurumi.Torque Analysis of a Noncontact Spinning System Using Linearly Actuated Magnets[J].Journal of the Japan society Applied Electromagnetics and Mechanics, 2011,19(3):517-520.
(编辑 李秀敏)
Study on Rotational Characteristic of Permanent Magnetic Suspension and Rotation System
WEI Wei, JIN Jia-qi, SUN Feng, TONG Ling
(School of Mechanical Engineering ,Shenyang University of Technology, Shenyang 110870,China)
Rotary characteristic research and analysis of permanent magnetic suspension and rotation system is carried out.The structure of permanent magnetic suspension and rotation system and spinning principle of iron ball is introduced, and based on this,magnetic field characteristic of the rotational disk magnet and magnetization characteristic on the surface of iron ball are verified by experiments.Disk magnets are arranged in three different ways,through the comparison and analysis of the rotation speed of the ball,the influencing factors of the rotary characteristic is validated to get the optimal way from permanent magnets arrangements.The research and result can provide the theoretical basis and reference for the further experiment of permanent magnetic suspension and rotation system.
permanent magnetic suspension;rotational characteristic;rotation drive;simulation
1001-2265(2017)06-0066-04
10.13462/j.cnki.mmtamt.2017.06.017
2016-10-02
国家自然科学基金(51105257, 51310105025);辽宁省高等学校杰出青年学者成长计划 (LQJ2014012);中国博士后科学基金(2015M571327)
韦伟(1989—),女,辽宁锦州人,沈阳工业大学博士研究生,研究方向为磁悬浮技术以及半主动馈能悬架,(E-mail) weiwei19890809@163.com;金嘉琦(1955—),男,沈阳人,沈阳工业大学教授,博士,博士生导师,研究方向为精密测量理论与技术研究,(E-mail)jjq612@126.com。
TH16;TG65
A
