下肢康复机器人对脑卒中偏瘫患者下肢运动功能与步行能力的效果①
2017-06-28刘畅郄淑燕王寒明谭建
刘畅,郄淑燕,王寒明,谭建
下肢康复机器人对脑卒中偏瘫患者下肢运动功能与步行能力的效果①
刘畅,郄淑燕,王寒明,谭建
目的观察下肢康复机器人辅助步行训练对脑卒中偏瘫患者运动功能及步行能力的影响。方法2015年1月至2016年10月,60例脑卒中偏瘫患者随机分为对照组(n=30)和实验组(n=30)。两组均接受常规训练,在此基础上,对照组予人工辅助步行训练,实验组予下肢机器人辅助步行训练。训练时间均为每次30 min,每周5次,连续训练8周。训练前后分别采用Fugl-Meyer评定量表下肢部分(FMA-LE)评测下肢运动功能,机器人评估系统评定屈髋肌群肌力(FHF)和伸膝肌群肌力(FKE),6分钟步行距离和10米步行时间评定步行能力。结果训练前,两组间一般资料及各指标无显著性差异(P>0.05)。训练后,实验组各指标均提高(t>2.274,P<0.05);除FKE外,实验组各指标均优于对照组(t>2.095,P<0.05)。结论下肢康复机器人辅助步行训练能够有效提高脑卒中偏瘫患者的运动功能与步行能力。
脑卒中;偏瘫;下肢康复机器人;运动功能;步行
[本文著录格式]刘畅,郄淑燕,王寒明,等.下肢康复机器人对脑卒中偏瘫患者下肢运动功能与步行能力的效果[J].中国康复理论与实践,2017,23(6):696-700.
CITED AS:Liu C,Qie SY,Wang HM,et al.Effect of robot-assisted gait training on lower limb motor function and gait ability in patients with hemiplegia after stroke[J].Zhongguo Kangfu Lilun Yu Shijian,2017,23(6):696-700.
脑卒中是一种严重威胁人类健康和生命的常见病,近年来脑卒中致残率达80%以上,重度致残者已达40%以上[1]。步行功能障碍是脑卒中患者主要的功能问题之一,直接关系到日常生活活动能力和生活质量[2]。因此恢复和提高运动功能,特别是下肢运动功能及步行能力是脑卒中患者最迫切的要求,也是脑卒中康复训练的重要目标之一。
下肢康复机器人作为近年来国内外康复领域的新兴步行训练手段,是在减重等速平板训练的基础上进一步发展而来的智能训练系统。它通过下肢驱动模块、动态减重及运动平板系统对患者进行垂直负重姿势下的重复性模拟步行训练,尤其是外骨骼式近端驱动型机器人在临床应用较为广泛。下肢康复机器人对脑卒中患者的步态(如步长等)、步行能力的改善已被国内外多篇文献证实[3-5]。本研究对下肢机器人训练在脑卒中偏瘫患者下肢运动功能、步行能力及相关性方面进行疗效观察。
1 资料与方法
1.1 一般资料
2015年1月至2016年10月在本院住院治疗的脑卒中偏瘫患者60例,临床诊断符合1995年中华医学会第四届全国脑血管病学术会议修订的诊断标准[6],并经头颅CT或MRI证实。本研究获得首都医科大学附属北京康复医院伦理委员会批准。
纳入标准:①大脑中动脉系统初发脑卒中,男女不限,年龄30~70岁;②病程≤3个月;③简易精神状态检查(Mini-Mental State Examination,MMSE)≥25分;④患者能够在低~中等程度徒手或辅具辅助下完成10米步行和6分钟步行测验;⑤患者本人及家属签署知情同意书。
排除标准:①压疮等皮肤病变;②泌尿系感染;③严重心脏病、慢性阻塞性肺疾病;④血栓;⑤下肢严重挛缩;⑥骨科损伤不稳定及严重骨质疏松;⑦下肢浅感觉及本体感觉重度减退,Fugl-Meyer感觉功能评定法足跟浅感觉≤1分,髋膝踝足趾≤1分;⑧精神障碍;⑨体质量≥135 kg;⑩双下肢长度差≥2 cm。
电脑生成60个随机数字,写在纸条上,放入外观相同的密闭不透明信封内;入组患者随机抽取信封,偶数为实验组,奇数为对照组。两组一般资料比较无显著性差异(P>0.05)。见表1。
1.2 方法
实验组使用Lokomat下肢康复机器人(瑞士Hocoma公司和瑞士苏黎世Balgrist大学附属医院脊髓损伤中心开发的Lokomat系统5.0版)给予患者步行训练。操作人员均经过专业培训及认证。训练前对患者腿部的长度进行测量、调节绑带尺寸。初始参数设置标准:①体重支持一般为患者体重的50%,以患者步行支撑期膝关节不出现打软现象为宜,系数范围0.2~0.7 (系统自行设置);②引导力的初始设置通常为100%;③步速1.5~1.7 km/h;④足部由绑带固定在踝关节背屈10°位左右,此后根据患者步行能力的改善情况,在保证步态正常的基础上逐步减少体重支持和引导力并增加速度。训练时由助手将患侧上肢保持在肩胛骨前伸、肘关节伸展、手指伸展或放置于体侧栏杆处,躯干充分抗重力伸展,抑制联合反应或防止肩关节半脱位导致的肌张力异常或不良姿势。
对照组给予徒手辅助平地步行训练,辅助量为保证步行不出现停滞下的最小辅助量,并随患者步行能力的改善逐渐减少。
两组训练时间均为30 min/次,5次/周,共8周。此外两组均行每天1次的常规康复训练,内容包括关节活动度训练、肌力强化、肌张力调整、坐立位平衡训练等。
1.3 观察指标
1.3.1 下肢运动功能
采用Fugl-Meyer评定量表下肢部分(Fugl-Meyer Assessment-Lower Extremities,FMA-LE)评定,下肢最高分34分。得分越高说明运动功能越好。
1.3.2 肌力测评
采用肌力评估工具(瑞士Hocoma医疗器械公司)对双侧屈髋、伸膝两组肌群的肌力进行测评。测评方法:患者下肢固定在伸髋30°或屈膝45°位,要求患者在听到电脑3 s倒计时结束的提示音时即刻行相关肌群的5 s等长最大收缩。数据包括屈髋肌群肌力(L-Force/Hip/Flex,FHF)和伸膝肌群肌力(L-Force/Knee/ Ext,FKE)。

表1 两组训练前一般资料比较
1.3.3 步行能力评测
采用6分钟步行、10米步行对患者耐力、步速等步行能力进行测试。6分步行距离越长,10米步行时间越短,说明步行能力越高。
1.4 统计学分析
采用SPSS 19.0软件进行统计分析。计量资料数据采用(xˉ±s)表示,组间比较采用独立样本t检验,组内比较采用配对样本t检验。病程不符合正态分布,采用秩和检验。计数资料采用χ2检验。显著性水平α= 0.05。
2 结果
所有患者均完成治疗。
2.1 FMA-LE
训练前,两组间FMA-LE评分无显著性差异(P>0.05)。训练后,实验组FMA-LE评分明显升高(P<0.01),且明显高于对照组(P<0.05)。见表2。
2.2 肌力
2.2.1 FHF
训练前,两组间FHF无显著性差异(P>0.05)。训练后,实验组FHF增加(P<0.05),且高于对照组(P<0.05)。见表3。
护理满意度评级标准采用调查问卷方式来进行,分为非常满意、满意以及不满意。护理总体满意度=(非常满意+满意)/每组总人数×100%。
2.2.2 FKE
训练前,两组间FKE无显著性差异(P>0.05)。训练后,实验组FKE增加(P<0.05),两组间仍无显著性差异(P>0.05)。见表4。
2.3 步行能力
2.3.1 6分钟步行距离
训练前,两组间6分步行距离无显著性差异(P>0.05)。训练后,实验组6分步行距离显著增加(P<0.001),实验组明显长于对照组(P<0.05)。见表5。
2.3.2 10米步行时间
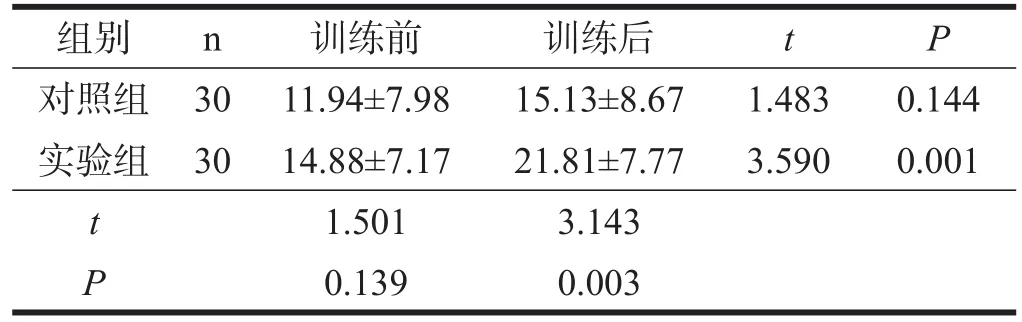
表2 两组训练前后FMA-LE评分比较
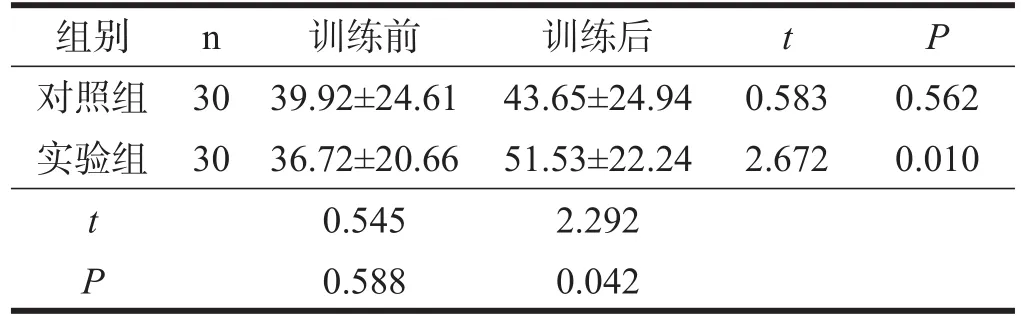
表3 两组训练前后FHF比较(N⋅m)
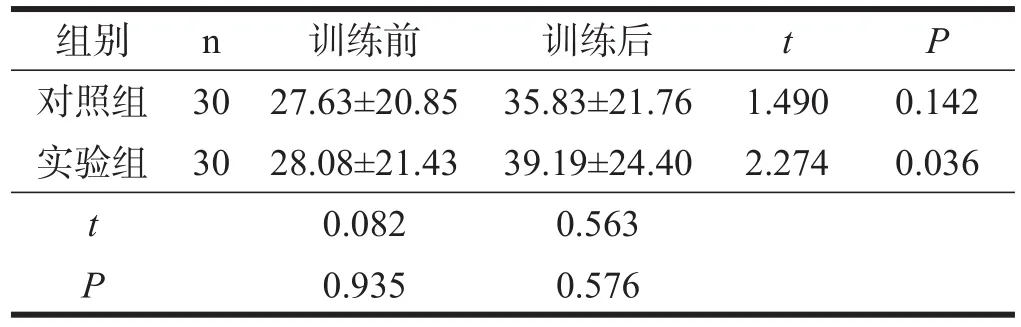
表4 两组训练前后FKE比较(N⋅m)
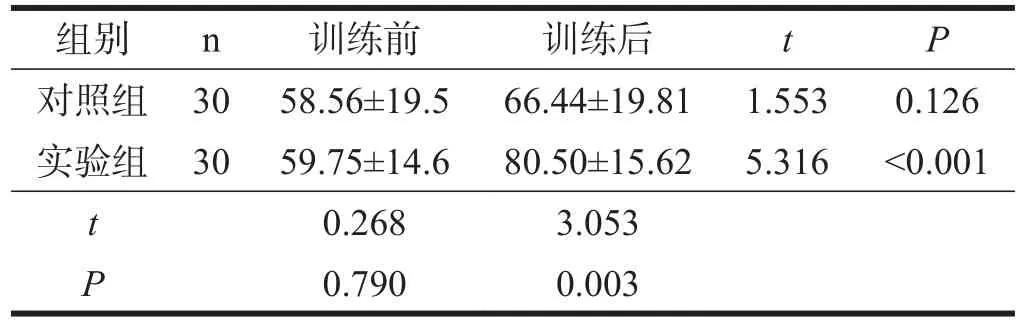
表5 两组训练前后6分钟步行距离比较(m)
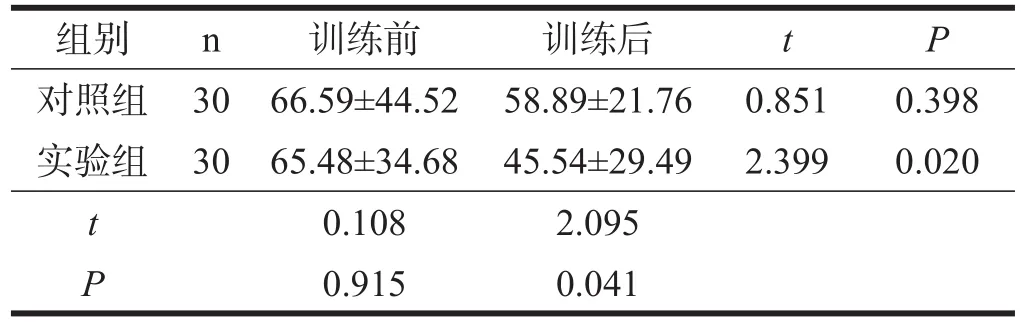
表6 两组训练前后10米步行时间的比较(s)
3 讨论
脑卒中偏瘫患者发病后由于中枢神经系统损伤导致肌张力异常,感觉减退,肌力耐力弱化,在步态上表现为内翻尖足着地,支撑期缩短,摆动期过度代偿等异常运动模式。步行能力方面表现为步长缩短,步频减小,步速下降等。本研究结果显示,机器人辅助步行训练后,FHF及步行能力均明显提高,主要原因考虑与下肢肌力、耐力提高,负重等本体感觉输入及任务导向性重复运动学习对中枢神经系统可塑性的促进等因素密切相关。
训练后,实验组FHF在组内及组间对比均有显著性改善。其原因可从以下几方面考虑:肌力增强的要素主要包括神经性因素和肌肉性因素两方面。
神经性因素指通过运动单位的动员(recruitment)及刺激发射频率(rate coding)的增加促进肌肉收缩,达到肌力改善[7]。
有研究表明,肌肉收缩前的初长度能影响肌肉收缩时所产生的肌力。肌纤维被牵伸拉长时,肌梭感受器敏感性提高,易使肌肉产生收缩。如果初长度适宜,能够产生最大肌力。机器人训练时,机械臂与跑台传送带的强制性向后运动较人工辅助步行更易使髋关节被动伸展到最大伸髋位;这一快速充分的牵拉使屈髋肌群被牵伸拉长,初长度增大,肌梭感受器敏感性提高,即对Ⅰa纤维的兴奋性输入刺激更易发生[8],传入纤维发放冲动的频率增大,从而使肌肉更易收缩。也有研究表明,传送带的强迫性运动使髋关节被动过伸,这一牵拉会提高髋部肌肉收缩使肢体向前摆动[9]。
肌力增强还与肌肉的生理横断面积增大密切相关,而这需要有足够的阻力负荷和承重负荷[10]。机器人训练通过不断降低引导力和体重支持、增加跑台的速度,及时增加屈髋肌群的阻力负荷和承重负荷。在训练中可以通过更大剂量的负荷、更高的效率及精确的重复来巩固效果[11],增强肌力和改善有氧运动能力。宋春红等[12]使用B型超声检测证实,下肢机器人训练4周可使缺血性脑卒中患者患侧胫前肌的羽状角和肌肉厚度在静息及最大等长收缩状态下较训练前显著增加,说明下肢康复机器人对于亚急性期脑卒中患者的肌肉形态改善有促进作用。
脑卒中后偏瘫步态的主要特点是稳定性差、步行不对称及能耗增加等[13]。脑卒中偏瘫患者步行能力与下肢肌力密切相关,在患侧髋屈曲、膝伸展和踝关节背屈等肌力因素中,髋屈曲肌力与步行速度和步行独立性的关系最为密切,可以解释33%的步行速度和步行独立性的变化[14],是决定步频的最主要肌力因素。患侧髋、膝关节随着外骨骼的摆动进行大量重复主被动屈伸运动,不仅可增强主动肌群肌力,而且可促进主动肌-拮抗肌的协同收缩,促进对痉挛肌肉的牵拉,从而调节肌张力,缓解肌肉痉挛,抑制异常运动模式[15]。朱童[16]运用三维步态分析评价下肢康复机器人对偏瘫患者步行能力的影响,训练8周后实验组较对照组的患侧摆动相百分比、步速、跨步长、步频均有显著性增大。因此机器人训练后FHF增强,以及主动肌-拮抗肌协同收缩的改善促进了步频的增加,提高了步行效率,可以考虑为10米步行时间缩短的原因之一。这一点在下肢康复机器人对于帕金森病患者的步态训练效果上也得到证实[17]。
膝关节伸展肌力是决定步长的最主要肌力因素[14]。孙利玲等[18]对1例有17年脑外伤病史患者使用Lokomat之后每间隔3个月对患者运动能力进行评估,患者屈髋、伸髋、屈膝及伸膝力量缓慢增加;同时患者下肢FMA评分和Berg平衡量表评分总体变化不大,但患者的步行距离和步行速度仍有所增加。本次实验训练后两组FKE虽均比8周前增加,但组间未见明显差异。主要考虑驱动模块对伸膝肌群的牵伸与抗阻力度不充分所致,有待进一步研究改进。
从感觉输入等神经生理学角度考虑,足底感觉的输入有助于激活支撑期躯干及下肢的抗重力伸展。文献报道,足跟着地时的触压觉刺激,是诱发躯干、下肢伸展运动的触发器,而小腿三头肌等下肢后部肌肉的牵伸又对支撑期的负重起到重要作用[19]。Lokomat型下肢机器人训练中,由于足部被绑带固定在背屈10°左右,能够保证患者在支撑初期足跟着地,继而形成跟趾步态;足跟着地时的触压觉刺激使本体感觉容易上行传导,兴奋前庭脊髓束,激活伸髋肌群及躯干等抗重力伸展系统。随着从支撑中期向末期的过渡,跟腱及小腿三头肌的牵伸可使高尔基体及Ⅰa纤维传来的感觉信息给予伸肌群运动神经以反馈,激活负重反应,并在支撑末期至摆动初期抑制该肌群,配合屈髋肌群的牵伸,诱发摆动期,有助于步行模式的形成。赵雅宁等[20]在下肢康复机器人对脑卒中患者平衡及步行功能的研究中,采用踝-后足评分量表评价患者步行能力。结果显示实验组取得了更高的踝-后足评分。朱童[16]在三维步态分析的研究中指出,训练8周后实验组较对照组的健侧/患侧支撑相百分比显著减少,而地反力垂直、向前方向峰值显著增加,说明实验组患腿支撑力和推进力明显提高。王大武等[21]采用检测被动运动变化阈值等方法,证实下肢机器人训练对于脑卒中患者偏瘫侧膝关节本体感觉的恢复有重要意义。
在感觉输入的基础上,足部矫形器使足底和髋关节传入的感觉在脊髓运动区被加强,而传出冲动又在不同程度上被小脑和高级运动中枢下传复制系统所放大。赵雅宁等[9]使用经颅多普勒超声对病变血管脑血流动力学进行评估后发现,机器人组训练8周后,病灶侧大脑前中动脉的血流速度较对照组增加,神经功能评分提高。模拟正常步态的引导运动提供了稳定的模式化步行训练,而模式化运动受到脊髓水平中枢模式发生器(central pattern generation,CPG)的控制及大脑的高级调控,可通过反复模式化训练达到康复效果[22]。
除此之外,机器人的外在结构可以帮助患者在步行中重心处于身体中线,躯体对位对线良好,躯干及髋关节保持抗重力伸展的良好姿势,上肢联合反应的抑制也有助于减轻步行中痉挛诱发的异常模式。在更自然省力的姿势控制下,患者可以较低的心率、较小的消耗进行长时间的训练,因此,耐力的改善与更为高效省力的步行模式,考虑也是6分钟步行距离增加的因素之一。
有研究表明,以任务为导向的重复性运动学习可以显著提高中枢神经损伤后患者的运动能力[23],使重组中的大脑皮质通过深刻的体验来学习和储存正确的运动模式[24]。下肢机器人训练通过适时适量的负荷刺激及感觉输入等神经机制激活,较为接近生理性步态的高精度大重复量训练,在改善髋屈曲肌力、6分步行距离及10米步行时间方面有明显效果,从步行能力方面提高了患者日常生活活动能力,减轻了社会负担。诚然,在改善脑卒中患者姿势控制、运动控制以及步态方面,神经生理学疗法具有更为重要的意义和优势,而下肢机器人训练中如何及时增减负荷量及体重支持,以及如何在训练中注意患者的姿势控制方面也需要进一步探索。如何更为合理地将二者有效结合,发挥更大的训练效果,是康复治疗工作者未来的课题之一。
[1]谢财忠,徐格林,刘新峰.脑卒中后早期康复的研究进展[J].中国康复理论与实践,2009,15(10):908-911.
[2]陈源,张继荣.脑卒中患者步行功能障碍的康复现状[J].中国康复,2017,32(1):70-73.
[3]Lünenburger L,Colombo G,Riener R,et al.Clinical assessments performed during robotic rehabilitation by the gait training robot Lokomat[C].9th International Conference on Rehabilitation Robotics,2005:345-346.
[4]Pohl M,Werner C,Holzgracefe M,et al.Repetitivelocomotor training and physiotherapy improve walking and basic activities of daily living after stroke:a single-blind,randomized multicentretrial[J].Clin Rehabil,2007,21(1):17-27.
[5]Westlake KP,Patten C.Pilot study of Lokomat versus manual-assistedtreadmilltrainingforLokomotorrecovery post-stroke[J].J Neuroeng Rehabil,2008,6(1):18-20.
[6]中华神经科学会,中华神经外科学会.各类脑血管疾病诊断要点[J].中华神经科杂志,1996,29(6):379-380.
[7]後藤勝正.筋肉肥大の機序[J].整.灾外,2005(48):401-408.
[8]柳澤健,乾公美.PNFマニュアル[M].2版.東京:南江堂出版社,2005:11-12.
[9]赵雅宁,郝正玮,李建民,等.下肢康复机器人训练对缺血性脑卒中早期偏瘫患者步行能力的影响[J].实用医学杂志,2013, 29(5):748-750.
[10]Klarner T,Chan HK,Wakeling JM,et al.Patterns of muscle coordination vary with stride frequency during weight assisted treadmill walking[J].Gait Posture,2010,31(3):360-365.
[11]丁文娟,郑蒙蒙,梁成盼,等.一种下肢康复机器人对脑卒中亚急性期偏瘫患者步行功能的影响[J].中国康复医学杂志, 2014,29(10):929-932.
[12]宋春红,扈慧静,张玉霞.康复机器人训练对脑卒中下肢肌肉结构形态影响的超声研究[J].实用医技杂志,2016,23(2): 117-120.
[13]Kim CM,Eng JJ.The relationship of lower-extremity muscle torque to locomotor performance in people with stroke[J]. Phys Ther,2003,83(1):49-57.
[14]谢远见,瓮长水,毕胜,等.脑卒中患者患侧下肢肌力与步行速度和步行独立性的关系[J].中国临床康复,2003,7(10): 1532-1533.
[15]高春华,黄晓琳,黄杰,等.下肢康复机器人训练对早期脑卒中偏瘫患者下肢功能的影响[J].中国康复医学杂志,2014,29 (4):351-353.
[16]朱童.运用三维步态分析评价下肢康复机器人对偏瘫患者步行能力影响的研究[D].杭州:浙江中医药大学,2015.
[17]刘燕平,陈美云.Lokomat下肢康复机器人对改善帕金森病患者步行能力的疗效研究[J].中国康复,2017,32(1): 351-353.
[18]孙利玲,刘刚.Lokomat步态训练对1例17年脑外伤病史患者的康复效应[J].中国伤残医学,2013,21(3):139-140.
[19]古泽正道,曾根政富.脳卒中後遺症患者のBobathアプローチ-臨床篇[M].東京:運動と医学出版社,2016:117-118.
[20]赵雅宁,郝正玮,李建民,等.下肢康复机器人对缺血性脑卒中偏瘫患者平衡及步行功能的影响[J].中国康复医学杂志, 2012,27(11):1015-1020.
[21]王大武,白定群,邵岚,等.下肢康复机器人训练对脑卒中偏瘫侧膝关节本体感觉的影响[J].中国康复医学杂志,2016,31 (9):950-954.
[22]刘华卫,王惠芳,朱锦杰,等.步行机器人训练中所体现的现代脑卒中康复理念及存在的问题[J].中国康复理论与实践, 2013,19(5):493-494.
[23]Barbeau H.Locomotor training in neurorehabilitation:emerging rehabilitation concepts[J].Neurorehabil Neural Repair, 2003,17(1):3-11.
[24]卢丽萍,桑德春,季淑凤.下肢康复机器人训练对脑卒中偏瘫患者运动能力和日常生活活动能力的影响[J].中国康复理论与实践,2016,22(10):1200-1203.
Effect of Robot-assisted Gait Training on Lower Limb Motor Function and Gait Ability in Patients with Hemiplegia after Stroke
LIU Chang,QIE Shu-yan,WANG Han-ming,TAN Jian
Department of Rehabilitation,Beijing Rehabilitation Hospital of Capital Medical University,Beijing 100144,China
QIE Shu-yan.E-mail:shuyanpb@163.com
Objective To explore the effect of robot-assisted gait training on the lower limb motor function and gait ability in patients with hemiplegia after stroke.Methods From January,2015 to October 2016,60 patients with hemiplegia after stroke were randomly divided into control group(n=30)and experimental group(n=30).Both groups
conventional rehabilitation,while the experimental group was given robot-assisted gait training and the control group was given artificial assisted gait training,30 minutes a day,five days a week for eight weeks.They were evaluated with Fugl-Meyer Assessment-Lower Limb(FMA-LE),muscle strength of hip flexion(L-FORCE/HIP/ Flex,FHF)and knee extension(L-FORCE/KNEE/Ext,FKE),Six Minutes Walking Distance and Ten Meters Walking Time before and after training.Results There was no significant difference in general data and all indexes between two groups before training(P>0.05).The scores of all the indexes improved in the experimental group after training(t>2.274,P<0.05),and all of them were better in the experimental group than in the control group(t>2.095,P<0.05),except FKE.Conclusion Robot-assisted gait training can effectively improve the lower limb motor function and gait ability of patients with hemiplegia after stroke.
stroke;hemiplegia;robot-assisted gait training;motor function;gait
R743.3
A
1006-9771(2017)06-0696-05
2017-02-15
2017-05-23)
10.3969/j.issn.1006-9771.2017.06.016
首都医科大学附属北京康复医院康复诊疗中心,北京市100144。作者简介:刘畅(1977-),女,汉族,北京市人,硕士,主管治疗师,主要研究方向:神经康复理论与技术,机器人训练。通讯作者:郄淑燕(1977-),女,山东人,副主任医师,主要研究方向:神经康复,骨科康复。E-mail:shuyanpb@163.com。
