混合悬架半主动控制器设计与试验
2017-06-27汪若尘钱金刚丁仁凯
汪若尘 焦 宇 钱金刚 丁仁凯 陈 龙
(江苏大学汽车与交通工程学院, 镇江 212013)
混合悬架半主动控制器设计与试验
汪若尘 焦 宇 钱金刚 丁仁凯 陈 龙
(江苏大学汽车与交通工程学院, 镇江 212013)
为改善传统被动悬架的动力学性能,回收悬架振动能量,设计了一种半主动混合悬架系统。建立1/4车动力学方程,分别研究馈能回路处于 Boost模式和 Buck模式时馈能回路内电流的变化情况,并分析 MOS管占空比对直线电动机电磁阻尼力的影响。在此基础上,引入基于天棚和地棚混合控制的半主动控制策略。提出半主动控制参考力的概念,并运用粒子群算法确定其最优控制参数。通过对不同工作模式下电路电流的追踪,达到对电动机电磁阻尼力实时控制的目的。接着运用 Simulink仿真搭建混合悬架系统模型,分别进行动力学性能、馈能性能以及电流跟踪控制效果对比。仿真结果表明,半主动混合悬架能够在改善车辆动力学性能的同时回收部分振动能量,所设计的半主动控制器对电流有较好的控制效果。最后,进行台架试验,通过对比试验结果验证了仿真结果的正确性。
汽车; 半主动混合悬架; 占空比; 天棚和地棚混合控制; 最优控制参数
引言
传统被动悬架旨在通过弹簧以及被动阻尼器等元件实现隔离路面激励对车身产生的振动。车身振动产生的能量以热能的形式耗散在阻尼器及弹簧等元件中。国内外学者[1-7]对这部分能量进行了研究,发现具有可观的回收前景。
被动悬架无法改善车辆动力学性能,主动悬架在提升汽车平顺性和操稳性的同时伴随着很大的能量消耗,而半主动悬架能够在消耗少量能量的同时,改善车辆动力学性能[8]。于是半主动悬架成为许多学者研究的新领域。1973年,KARNOPP等[9]提出了天棚阻尼控制模型,第一次实现了悬架的半主动控制。1994年,PRINKOS等[10]使用电流变和磁流变体作为工作介质,研究了半主动悬架系统。2002年,采用美国德尔福公司磁流变减振器的Magnet Ride半主动悬架系统应用在Cadillac Seville STS高档车上,此悬架系统能根据行驶情况自动改变减振阻尼[11]。
早期研究馈能悬架时采用蓄电池作为能量储存装置[12]。但是由于车辆行驶时受到路面随机激励作用,在某些时刻电机产生的感应电动势小于蓄电池充电端电压,便无法实现充电,存在能量的损失[13];此外,某些时刻产生过大的感应电动势也会损伤电池。DC/DC变换器在馈能悬架上的应用[14],调节了充电端电压,使电能可以稳定地存储至储能装置;而使用超级电容作为储能装置,则是由其优良的工作特性所决定的。
本文以混合悬架为研究对象,基于单向Boost-Buck变换器。首先设计半主动混合悬架系统,包括混合悬架动力学模型以及馈能回路;然后设计半主动控制策略,并借助粒子群算法确定最优控制参数,完成半主动控制器设计;最后分别通过仿真与试验验证控制器的控制效果。
1 半主动混合悬架系统及动力学模型
1.1 半主动混合悬架系统
所设计的半主动混合悬架系统包括被动阻尼器、弹簧、直线电动机、馈能回路、储能装置(超级电容)以及半主动控制器,如图1所示。
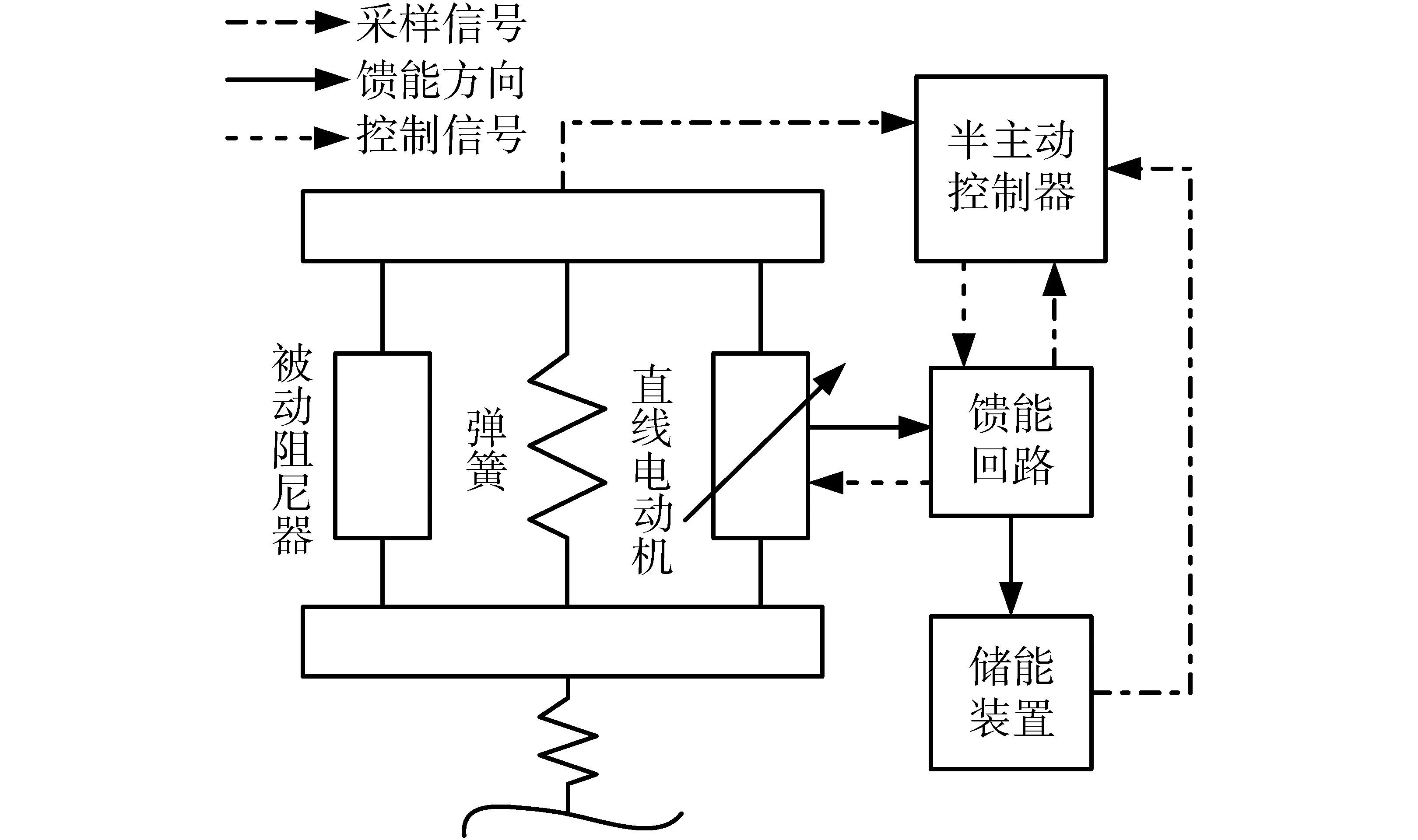
图1 半主动混合悬架系统实施方案Fig.1 Implementation of semi-active suspension system
结合图1对半主动控制原理进行阐述:首先半主动控制器获取来自混合悬架模型、馈能回路以及储能装置的相关采样信号;半主动控制器根据采样信号制定控制方案,并将控制信号传递给馈能回路,通过控制馈能回路内MOS管的通断,一方面控制馈能回路的工作模式(Boost/Buck模式),另一方面控制馈能回路电流的变化,从而控制直线电动机电磁阻尼力的变化,实现对悬架的半主动控制。在此过程中,悬架的部分振动能量以电能的形式存储至储能装置。
1.2 混合悬架动力学模型
为了分析混合悬架对车辆动态性能的影响,引入二自由度的混合悬架模型,如图2所示。

图2 混合悬架动力学模型Fig.2 Dynamic model of hybrid suspension
由图2可得混合悬架二自由度动力学方程为
(1)
其中
Ft=kii
(2)
式中mb——簧上质量,kgmt——簧下质量,kgks——弹簧刚度,N/mkt——轮胎刚度,N/mc——被动阻尼器阻尼系数,N·s/mzb——簧上质量位移,mzt——簧下质量位移,mz0——路面激励,mFt——直线电动机电磁阻尼力,Nki——电动机推力系数i——电动机绕组电流
此外,直线电动机随悬架振动做上下运动时,其内部三相绕组在永磁体产生的气隙磁场中做切割磁感线运动,会产生感应电动势Um,而感应电动势Um与电动机运行速度v存在关系[15]
Um=kev
(3)
其中
(4)
式中ke——电动机反电动势系数
2 馈能回路分析
2.1 馈能回路工作模式
车辆行驶过程中,直线电动机会在路面状况较好的情况下随悬架做低频振动。而直线电动机低频振动时只能产生较小的感应电动势,作为馈能回路的输入端电压,较小的输入端电压无法实现给超级电容充电。于是产生了馈能回路的充电“死区”现象[16]。此外,对馈能回路电流的调节能够有效控制用来隔振的电动机电磁阻尼力。所以,为了充分回收悬架的振动能量,减小充电“死区”现象,同时对馈能回路电流进行有效地跟踪,本文使用单向Boost-Buck变换器来调节馈能回路电流。馈能回路基本结构如图3所示,图中,AC为馈能回路输入端电压,L为直线电动机线圈电感,R为直线电动机线圈内阻;虚线框内则是Boost-Buck变换器,其中VT1、VT2、VT3分别是控制电路工作模式以及电路通断的MOS管,Ldc是储能电感,Rv是电路保护电阻,用于防止MOS管通断瞬间瞬时大电流损坏电器元件;SC是用于回收电能的超级电容。
馈能回路可进行Boost以及Buck 2种工作模式的切换。
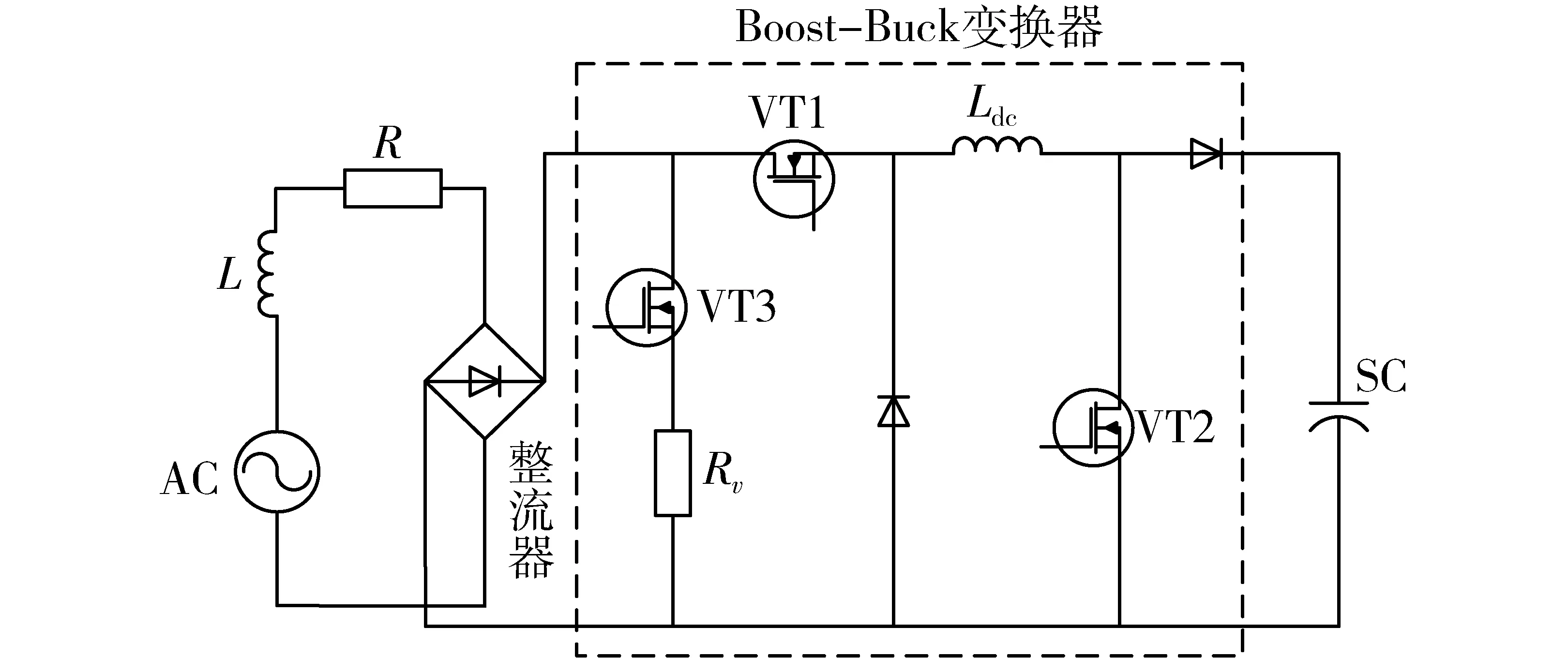
图3 馈能回路基本结构Fig.3 Basic structure of energy-regenerative circuit
2.2 Boost模式
在图3所示的馈能回路中,VT1和VT3之间存在逻辑非关系。即当VT1导通时,VT3断开;而当VT1断开时,VT3导通。
当VT1常通,VT3常断时,VT2作为升压斩波器,馈能回路工作在Boost模式,此时馈能回路工作简图如图4所示。
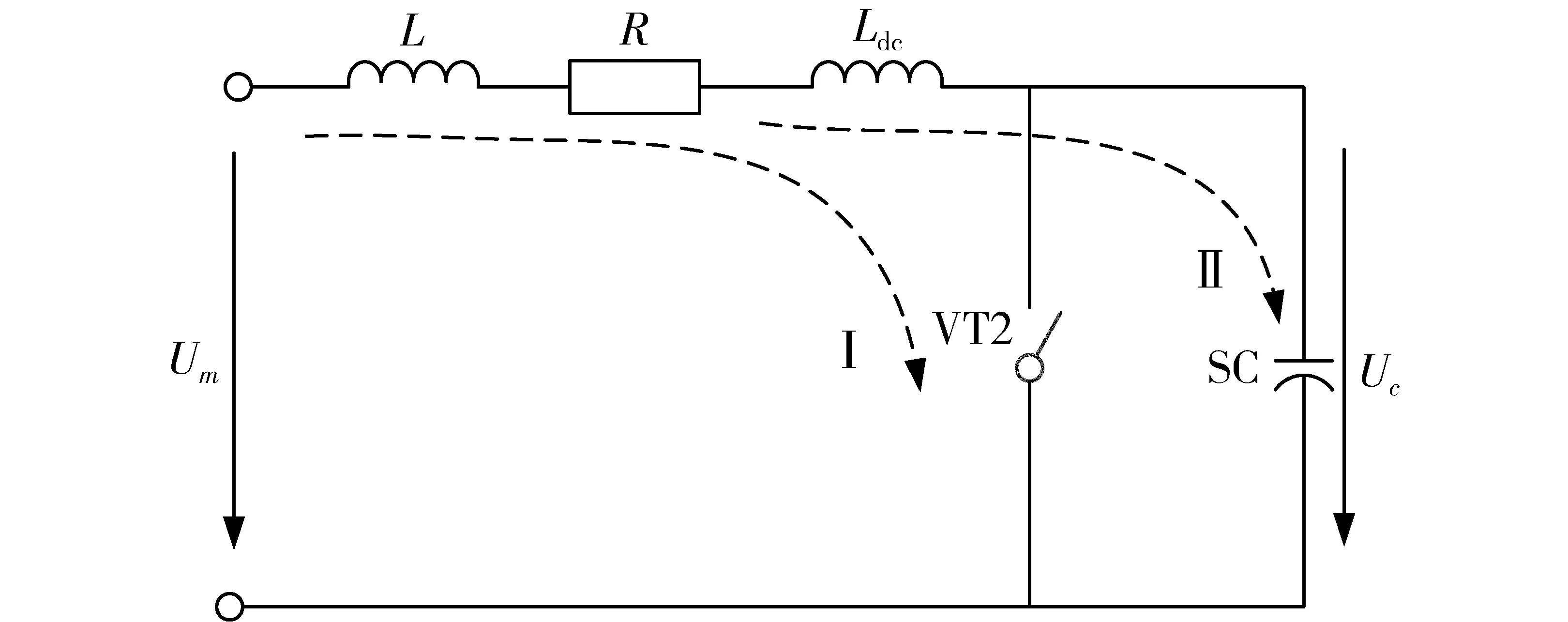
图4 Boost模式Fig.4 Boost mode
Boost模式分为2个工作过程,当VT2闭合时,馈能回路处在过程I,超级电容短路,电能被暂存至外电感Ldc中;当VT2断开时,馈能回路处在过程Ⅱ,此时超级电容充电端电压变大,外电感Ldc和输入端电压一起给超级电容充电。
假设变换器在CCM模式下工作,则此时电流平均值为[17]
(5)
式中Um——馈能回路输入端电压Uc——超级电容端电压D——占空比
2.3 Buck模式
当VT2常断时,VT1作为降压斩波器,馈能回路工作在Buck模式,此时馈能回路简图如图5所示。
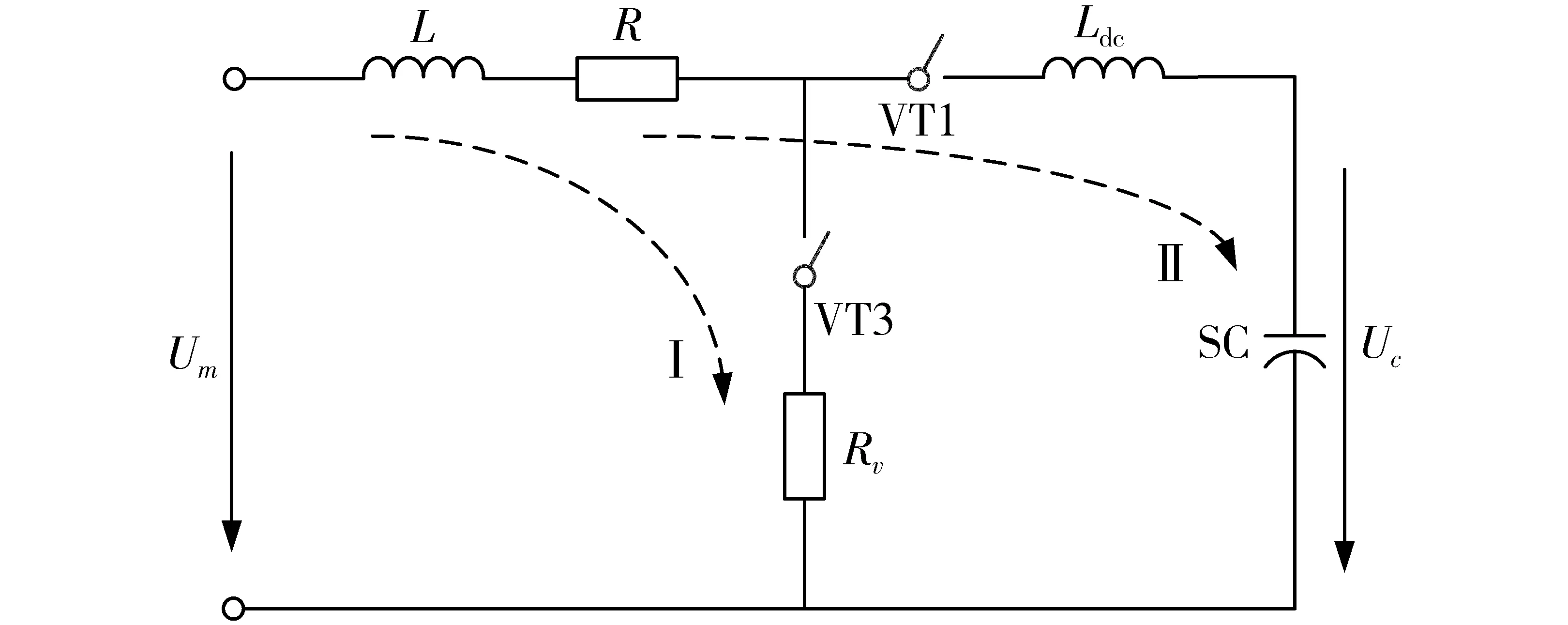
图5 Buck模式Fig.5 Buck mode
Buck模式也分为2个工作过程,当VT1断开,VT3闭合时,馈能回路处在过程Ⅰ,由于充电端电压过大,所以先让保护电阻Rv分压;当VT1闭合,VT3断开时,馈能回路处于过程Ⅱ,此时充电端电压可以安全地给超级电容充电。
与Boost模式相同,当变换器在CCM模式下工作时,电流平均值为[17]
(6)
由式(4)和式(5)可知,MOS管占空比D影响着馈能回路电流的变化。再结合图4和图5可以计算出馈能回路工作时电流的具体变化情况(表1)。由表1可知,在悬架系统运作时,馈能回路电流又随着工作模式以及端电压的变化而变化。

表1 馈能回路电流变化情况
3 半主动控制器设计
3.1 半主动控制参考力
悬架以及馈能回路模型提出后,需要采用合适的控制方法,可以实现整个系统的运作。由于天棚阻尼控制是优化车辆乘坐舒适性的控制方法[18],而地棚阻尼控制是优化车辆行驶安全性的控制方法[19],所以从兼顾车辆乘坐舒适性以及行驶安全性的角度考虑,本文采用基于天棚和地棚混合控制的半主动控制方法。在此基础上,提出半主动控制参考力的概念,预期的半主动控制效果是天棚控制与地棚控制两种控制效果的折中。定义半主动控制参考力为
(7)
式中Fref——半主动控制参考力Cs——天棚阻尼系数Cg——地棚阻尼系数
参考力Fref是对悬架进行控制的理想力。在实际中,直线电动机产生的电磁阻尼力Ft需要实时地跟踪参考力Fref,旨在与参考力趋近,实现最优控制。
3.2Cs和Cg值的匹配
在确定Cs和Cg时,采用粒子群算法进行参数寻优,车辆相关参数见表2。

表2 车辆参数
粒子位置和速度更新公式可表示为[20]
(8)
优化寻优时,以车身加速度为目标函数,并建立相应的约束条件,参数寻优的数学模型表示为
(9)
式中Fd——半主动混合悬架车轮动载荷fd——半主动混合悬架动挠度Fdp——被动悬架车轮动载荷fdp——被动悬架动挠度G——装配半主动混合悬架车辆的静载荷fs——装配半主动混合悬架车辆的静挠度
参数寻优的基本原则是:首先保证半主动悬架车轮动载荷以及悬架动挠度分别不超过被动悬架相应动载荷和动挠度的10%,其次保证半主动混合悬架的车轮动载荷和悬架动挠度分别不超过车轮静载以及悬架静挠度的1/3,在这两个前提下,尽可能的提高乘坐舒适性。
在参数寻优前,设定种群规模为10,迭代次数为k=1 000,粒子群搜索空间维度设为2,分别表示Cs和Cg,惯性权重为0.8,学习因子均为2。得到控制参数Cs和Cg的最优值分别为415和405。
3.3 半主动控制器
半主动控制器工作过程包括馈能回路工作模式的切换以及电流的跟踪控制2个环节。半主动控制器通过获取相关采样信号,可以实现对馈能回路工作模式的切换,以及对MOS管占空比的控制,达到对馈能回路电流控制的目的。
如图6所示,工作模式的切换主要依赖模式判别逻辑输出的控制信号控制MOS管通断实现,模式判别逻辑的判断过程则是依靠馈能回路的采样信号Um和Uc,以及参考力信号Fref。
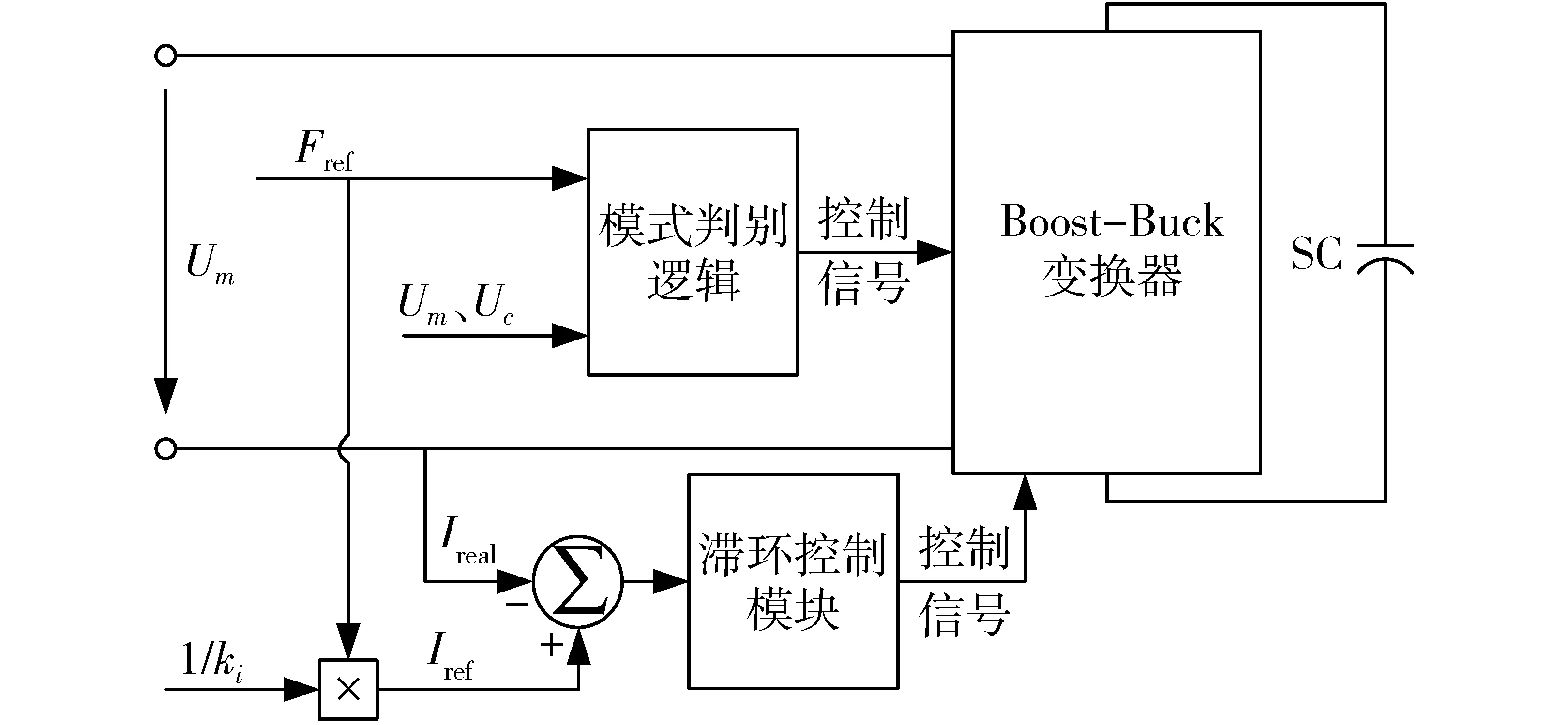
图6 半主动控制器控制原理图Fig.6 Control schematic of semi-active controller

馈能回路电流来减小直线电动机电磁阻尼力,使电磁阻尼力逼近控制参考力。这时,控制信号驱动相关MOS管,使VT2常断,电路切换到Buck模式。同理,在Buck模式下,用参考电流和实际电流的差值与高低阈值作比较。通过改变MOS管VT1和VT3的通断状态来调节电流,最终实现Buck工作模式下的电流跟踪。
4 仿真分析
在得到最优控制参数后,为验证所设计半主动控制器的控制效果,进行基于Simulink的仿真。仿真环境是C级路面,车速20m/s,仿真时间10s,将半主动混合悬架与传统被动悬架作对比,得到关于两者的幅频特性曲线,如图7所示。
由图7可知,在低频共振区,混合悬架质心加速度以及车轮相对动载的幅值均有所降低,悬架动挠度的幅值也略有改善;但在高频共振区,质心加速度没有明显变化,车轮相对动载以及悬架动挠度的幅值均略有增大。说明半主动混合悬架在提升车辆乘坐舒适性的同时也伴随着行驶安全性的轻微恶化。其原因主要是因为引入直线电动机增加了非簧载质量。
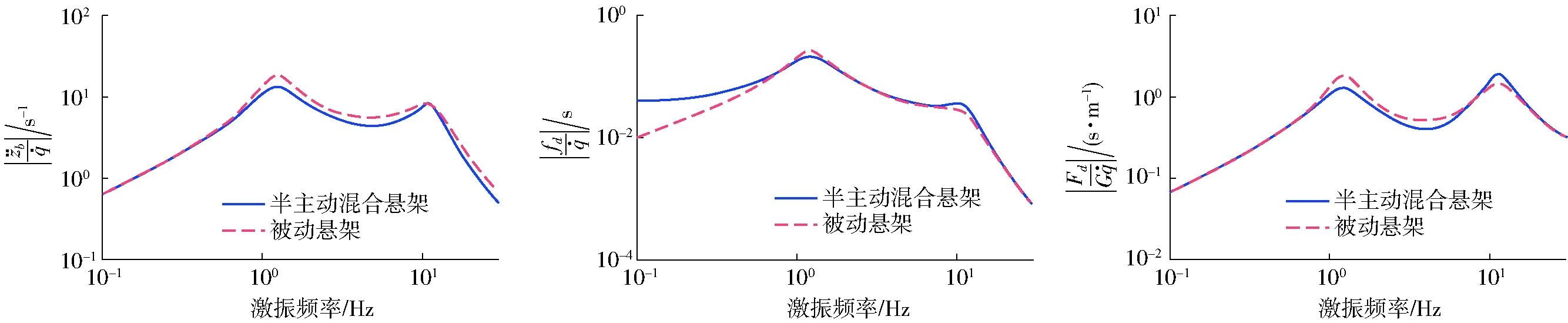
图7 半主动混合悬架与被动悬架幅频特性对比Fig.7 Comparisons of amplitude frequency characteristics of semi-active suspension and passive suspension
仿真参数不变,进行时域仿真对比,结果如图8所示。其均方根如表3所示。
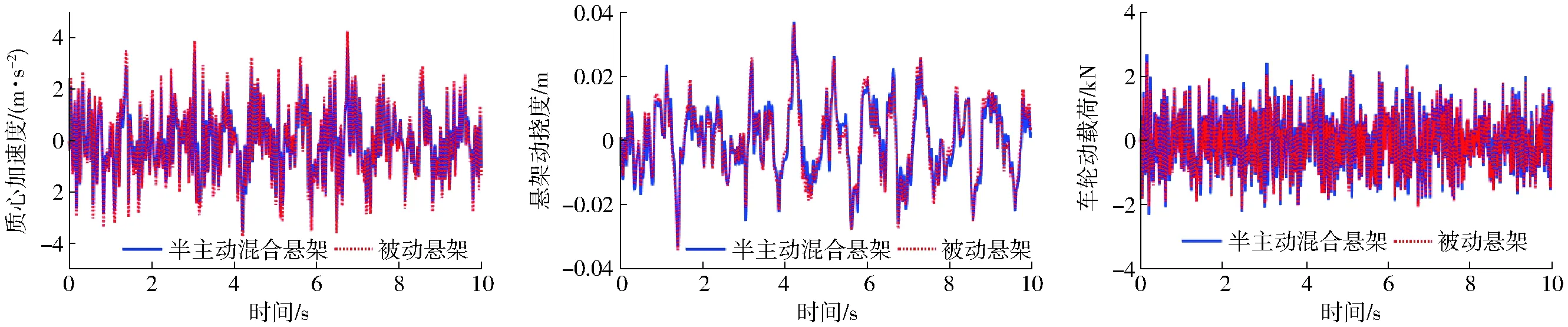
图8 半主动混合悬架与被动悬架时域对比Fig.8 Time domain comparisons of semi-active suspension and passive suspension

参数半主动混合悬架传统被动悬架质心加速度/(m·s-2)1192213367悬架动挠度/m0011200114车轮动载荷/N81169617714779
由表3可知,与传统被动悬架相比,半主动混合悬架使质心加速度和悬架动挠度分别降低了10.8%和1.8%;车轮动载荷则增加5.2%。说明车辆乘坐舒适性有很好的改善,而行驶安全性虽有恶化,但在可控范围(10%)之内。
与此同时,仿真还得到了馈能电路真实电流与理论电流的跟踪图,如图9所示。
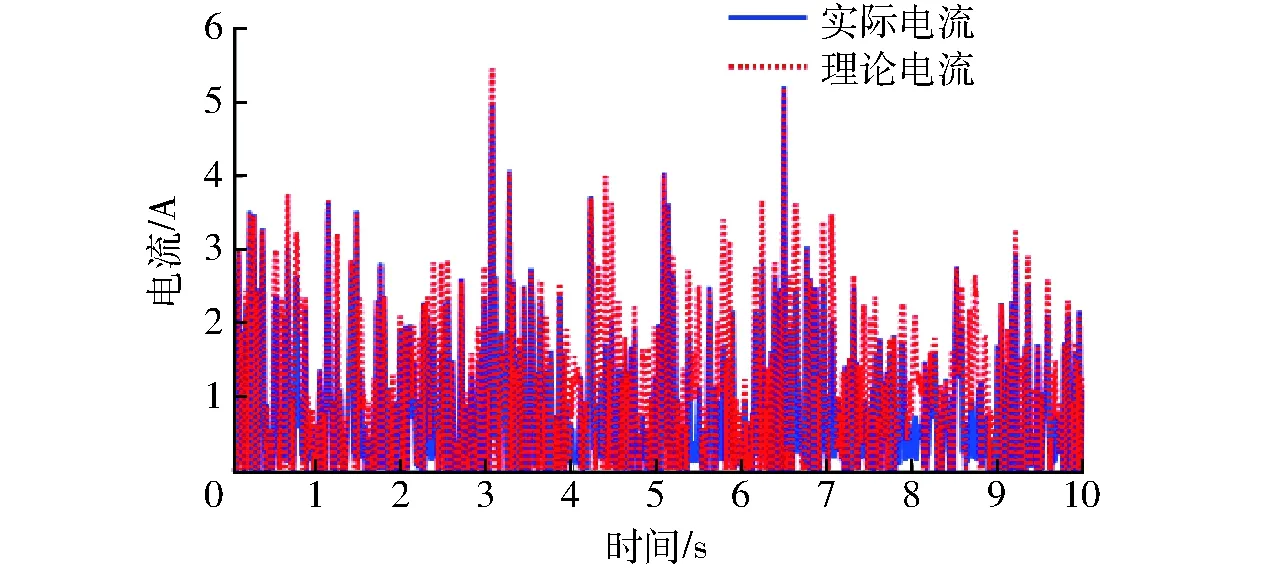
图9 理论电流与实际电流对比Fig.9 Comparison of actual and theoretical currents
从图9中可以看出,理论电流曲线在大部分时间内与实际电流曲线重合,说明实际电流对理论电流有较好的跟踪。
最后,仿真还得到了悬架馈能情况的数据,这主要反映在超级电容端电压的变化。在10 s的仿真时间内,超级电容端电压从初始的20 V上升至最终的20.248 4 V,根据能量计算公式可以算出超级电容共回收能量约41.66 J。
5 试验验证
为验证仿真结果的正确性,在INSTRON 8800型数控液压伺服激振试验台上进行了台架试验。试验实况如图10所示。采用的其他仪器有:加速度传感器、位移传感器、LMS数据采集器、稳压电源、三相整流器等。对馈能回路MOS管占空比的控制是依靠dSPACE提供驱动信号。
分别对半主动混合悬架以及被动悬架进行试验。试验环境是20 m/s,C级路面,试验时间是10 s,试验相关参数见表2。试验得到的动力学性能时域变化曲线如图11所示。

图10 试验实况Fig.10 Test charts
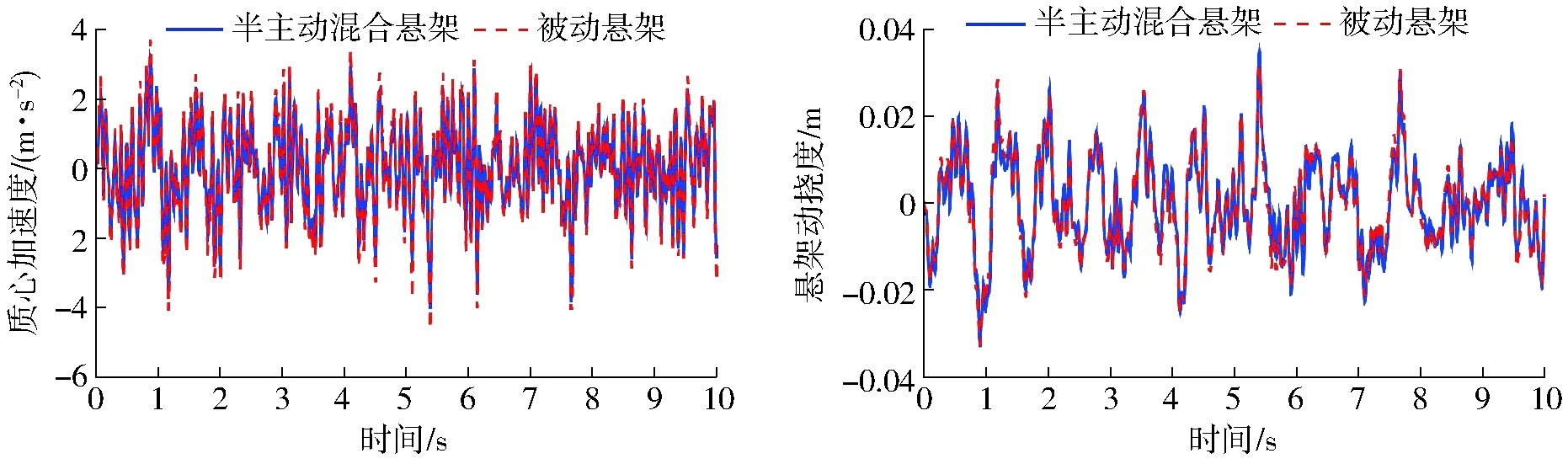
图11 试验结果Fig.11 Test results
根据试验数据计算得各动力学指标的均方根如表4所示。

表4 试验结果均方根
分析图11以及表4的试验结果并对比仿真结果,可知仿真值与试验值比较接近,只存在较小的误差,而且均在误差容许范围之内,说明了仿真结果的正确性。此外,从试验结果看,相比于传统被动悬架,半主动混合悬架的质心加速度和悬架动挠度分别降低11.0%和1.9%,说明半主动混合悬架改善了车辆的乘坐舒适性。
另一方面,在进行半主动混合悬架性能试验时,得知超级电容端电压从初始20 V上升至20.198 V,计算可得回收的振动能量为33.16 J。与仿真相比,回收能量有所减少。这是因为仿真的电路元件过于理想,实际中各元件存在一定的能量损耗。
6 结论
(1)设计了一种半主动混合悬架系统,包括混合悬架系统与半主动控制器。
(2)分别分析了馈能回路的工作原理以及半主动控制器的控制原理,通过粒子群优化算法寻优,找到本文所设计控制器的最优控制参数。
(3)台架试验结果与仿真结果接近,表明装配半主动混合悬架的车辆可以在保证车辆乘坐舒适性的同时回收一部分振动能量。
1 SEGAL L,LU X P. Vehicular resistance to motion as influenced by road roughness and highway alignment[J]. Australian Road Research,1982,12(4):211-222.
2 KHOSHNOUD F,ZHANG Y C,SHIMURA R,et al. Energy regeneration from suspension dynamic modes and self-powered actuation[J]. IEEE/ASME Transactions on Mechatronics, 2015, 20(5):1-12.
3 喻凡,曹民,郑雪春. 能量回馈式车辆主动悬架的可行性研究[J].振动与冲击,2006,24(4):27-30. YU Fan,CAO Min,ZHENG Xuechun. Research on the feasibility of vehicle active suspension with energy regeneration[J]. Journal of Vibration and Shock,2006,24(4):27-30.(in Chinese)
4 于长淼,王伟华,王庆年. 混合动力车辆馈能式悬架的节能潜力[J]. 吉林大学学报,2009,39(4):841-845. YU Changmiao,WANG Weihua,WANG Qingnian. Analysis of energy-saving potential of energy regenerative suspension system on hybrid vehicle[J]. Journal of Jilin University,2009,39(4):841-845.(in Chinese)
5 张晗,过学迅,方志刚,等. 馈能式悬架能量回收潜力试验研究[J]. 振动、测试与诊断,2015,35(2):225-230. ZHANG Han,GUO Xuexun,FANG Zhigang,et al. Experimental study on energy recovery potential of regenerative suspension[J]. Journal of Vibration,Measurement & Diagnosis,2015,35(2):225-230.(in Chinese)
6 许广灿,徐俊,李士盈,等. 电动汽车振动能量回收悬架及其特性优化[J]. 西安交通大学学报,2016,50(8):90-95. XU Guangcan,XU Jun,LI Shiying,et al. Energy regenerative suspension and its performance optimization for electric vehicle[J]. Journal of Xi’an Jiaotong University,2016,50(8):90-95.(in Chinese)
7 寇发荣. 车辆电动静液压半主动悬架设计与馈能研究[J/OL]. 农业机械学报,2016, 47(5):352-359. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20160548&flag=1. DOI:10.6041/j.issn.1000-1298.2016.05.048. KOU Farong. Design and energy regenerative study on semi-active suspension with electro-hydrostatic actuator[J/OL]. Transactions of the Chinese Society for Agricultural Machinery,2016, 47(5):352-359.(in Chinese)
8 余志生. 汽车理论[M]. 4版. 北京:机械工业出版社,2009.
9 GROSBY M J,KARNOPP D C. The active damper—a new concept for shock and vibration control[J]. The Shock and Vibration Bull,1973,43(4):119-133.
10 方子帆,邓兆祥,郑玲,等. 汽车半主动悬架系统研究进展[J]. 重庆大学学报,2003,26(1):104-108. FANG Zifan,DENG Zhaoxiang,ZHENG Ling,et al. Research progress of automotive semi-active suspension system[J]. Journal of Chongqing University,2003,26(1):104-108.(in Chinese)
11 姚嘉伶,蔡伟义,陈宁. 汽车半主动悬架系统发展状况[J]. 汽车工程,2006,28(3):276-280. YAO Jialing,CAI Weiyi,CHEN Ning. A review on the development status of automotive semi-active suspension systems[J]. Automotive Engineering,2006,28(3):276-280.(in Chinese)
12 何仁,陈士安,陆森林. 馈能型悬架的工作原理与结构方案评价[J]. 农业机械学报,2006,37(5):5-9. HE Ren,CHEN Shian,LU Senlin. Operation theory and structure evaluation of reclaiming energy suspension[J]. Transactions of the Chinese Society for Agricultural Machinery,2006,37(5):5-9.(in Chinese)
13 ZHU S,SHEN W,XU Y. Linear electromagnetic devices for vibration damping and energy harvesting:modeling and testing[J]. Engineering Structures,2012,34:198-212.
14 OKADA Y,KIM S S,OZAWA K. Energy regenerative and active control suspension[C]∥ASME 2003 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference,2003: 2135-2142.
15 汪若尘,钱金刚,施德华,等. 直线电机馈能悬架半主动控制特性的仿真研究[J]. 广西大学学报:自然科学版,2015, 40(5):1102-1108. WANG Ruochen,QIAN Jin’gang,SHI Dehua,et al. Simulational analysis of semi-active control characteristic of energy-regenertive suspension with linear motor[J]. Journal of Guangxi University:Natural Science Edition, 2015, 40(5):1102-1108. (in Chinese)
16 王利. 现代直线电机关键控制技术及其应用研究[D]. 杭州:浙江大学,2012.
17 SHI Dehua,CHEN Long,WANG Ruochen,et al. Design and experiment study of a semiactive energy-regenerative suspension system[J]. Smart Materials and Structures,2015,24(1):15001-15012.
18 张磊,张进秋,彭志召,等. 车辆半主动悬架改进型天棚阻尼控制算法[J]. 汽车工程,2015,37(8):931-935. ZHANG Lei,ZHANG Jinqiu,PENG Zhizhao,et al. Modified skyhook control algorithm for vehicle semi-active suspension[J]. Automotive Engineering,2015,37(8):931-935.(in Chinese)
19 张孝良,聂佳梅. 被动地棚阻尼悬架系统设计及特性分析[J]. 机械设计与研究,2014,30(6):170-173. ZHANG Xiaoliang,NIE Jiamei. Design and performance analysis of passive suspension system with damping[J]. Machine Design and Research,2014,30(6):170-173.(in Chinese)
20 张武,陈建,高煜. 基于粒子群优化的发动机悬置系统稳健优化设计[J]. 农业机械学报,2010,41(5):30-35. ZHANG Wu, CHEN Jian, GAO Yu. Robust optimal design of an engine mounting system based on particle swarm optimization[J]. Transactions of the Chinese Society for Agricultural Machinery,2010,41(5):30-35.(in Chinese)
Design and Experiment on Semi-active Controller for Hybrid Suspension
WANG Ruochen JIAO Yu QIAN Jin’gang DING Renkai CHEN Long
(SchoolofAutomobileandTrafficEngineering,JiangsuUniversity,Zhenjiang212013,China)
In order to improve the dynamic performance of traditional passive suspension and recovery vibration energy from it, a semi-active hybrid suspension system was designed. The dynamic equation of the 1/4 vehicle was established, and then the variations of current in the Boost mode and Buck mode were studied respectively, and the influence of duty cycle of Mosfet on electromagnetic damping force of the linear motor was also analyzed. On this basis, semi-active control strategy based on skyhook and groundhook hybrid control was introduced. The concept of semi-active control reference force (Fref) was proposed, and the optimal control parameters of the semi-active control reference force were determined by using the particle swarm optimization algorithm. Through tracking the current in different working modes, the purpose of real-time control of the motor electromagnetic damping force was reached. Then the hybrid suspension system model was built by Simulink simulation, and the dynamic and regenerative performance of the hybrid suspension system and the current tracking control effect of the semi-active controller were compared respectively. The simulation results showed that the semi-active hybrid suspension could improve the dynamic performance of vehicle, and partial vibration energy was recovered at the same time, the semi-active controller that designed had better control effect on current. Finally, the bench test was carried out, and the correctness of the simulation results was verified by comparing with the test results.
vehicle; semi-active hybrid suspension; duty cycle; skyhook and groundhook hybrid control; optimal control parameters
10.6041/j.issn.1000-1298.2017.06.044
2016-09-02
2016-10-10
国家自然科学基金面上项目(51575240)、江苏省教育厅自然科学基金重大项目(15KJA460005)和镇江市工业支撑项目(GY2015029)
汪若尘(1977—),男,教授,博士生导师,主要从事车辆动态性能模拟与控制研究,E-mail: wrc@ujs.edu.cn
U463.33
A
1000-1298(2017)06-0334-07
