基于ADAMS的履带式多功能钻机变幅—偏摆机构动力学仿真分析
2017-06-27吴帮普穆迪
吴帮普,穆迪
(1.贵州大学机械工程学院,贵州 贵阳 550000 ;2.贵州航天天马机电科技有限公司,贵州 遵义 563000)
基于ADAMS的履带式多功能钻机变幅—偏摆机构动力学仿真分析
吴帮普1,穆迪2
(1.贵州大学机械工程学院,贵州 贵阳 550000 ;2.贵州航天天马机电科技有限公司,贵州 遵义 563000)
介绍了ADAMS虚拟样机技术在履带式多功能钻机变幅机构的动力学分析中的应用,通过仿真分析结果与实验现象及数据的对比,验证了仿真分析结论的正确性。同时,借助该虚拟样机技术良好的可视化效果对样机多种工作状况进行模拟,对工作过程中所遇到的各种特殊现象的产生机理进行合理推断,得到解决方案,并运用于新的系列钻机产品研发中,有效提升产品性能,降低研究成本,缩短研制周期。
钻机;变幅机构;ADAMS;建模仿真
履带式多功能钻机是主要针对地下连续墙、土钉墙支护、防渗墙、抗浮锚杆等施工工艺中钻孔成孔的钻探设备,广泛应用于水电围堰施工、堤坝防渗施工、公路边坡锚固、地铁隧道管棚支护施工、机场、高层建筑深基坑。采用潜孔锤常规钻进、跟管钻进、螺旋钻进。在各类复杂地层及不同钻进方法的造孔施工实践中,其优异的凿孔性能,得到广泛认可。
20世纪40年代,国外已将锚固支护技术应用于巷道支护工程,到20世纪50年代末,美国、瑞典、英国、波兰等国家真正实现锚固支护的机械化,先后出现伸缩式气动凿岩机锚固孔、钻车式锚固钻机,并率先将锚固支护技术运用于煤矿巷道支护。经过几十年的发展,国外锚固钻机产品型号齐全,针对性强,机械化和智能化程度高,进入我国国内市场的厂商有德国的Bauer-Klemm(宝峨-克莱姆),瑞典的Atlas Copco(阿特拉斯),美国Schramm(雪姆)和Ngersoll-rand(英格索兰)等公司。
20世纪60年代末,我国引进英国维克托锚固钻机,并开始研制第一代电动锚固钻机,20世纪90年以后,在锚固支护技术的大力推广应用下,锚固钻机技术才有了真正的发展。近几年,我国锚固钻机的研制普遍吸收了国外锚固钻机技术,并针对具体的水文地质和施工工法,慢慢形成国产品牌的锚固钻机。目前国内主要品牌有无锡双帆YGL系列、成都哈迈HM系列、北京天和纵邦系列、北京探矿系列、北京优博林系列等。
履带式多功能钻机为了适合不同的施工要求,已经向高效率、高性价比发展,根据不同的施工工法和施工地质条件,衍生出各种各样的机型,所以研发周期、研发成本成了市场竞争力的重要内容之一。ADAMS是集建模、求解、可视化一体的机械系统仿真分析软件,广泛应用于机械结构的静力学、运动学、动力学、振动学等分析。该软件在几十年的应用中,得到了很好的验证,说明该软件分析结果可以作为产品设计的参考依据,采用该软件作为研发工具,可以有效提高分析结果的正确性和可靠度。
1 结构组成
1.1 整机结构
TDL-260履带式多功能钻机是在借鉴国外阿特拉斯产品的基础上,考虑西南地区水文情况,研制的集水井钻探和边坡锚固一体的工程钻机。
如图1所示,钻机主要由:履带底盘、柴油发动机、动力头、钻桅、变幅机构、夹持器、卷扬、液压系统、控制系统组成。主要参数为:柴油发动机70kW,总重量10000kg,长宽高6500mm×2300mm×2880mm,钻孔直径130~280mm,动力头最大扭矩6000Nm,起拔力65kN,动力头滑移行程3500mm,卷扬提拉力85kN。

图1 TDL-260履带式多功能钻机结构组成
1.2 变幅—偏摆机构
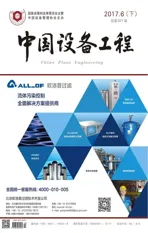
TDL-260履带式多功能钻机的变幅—偏摆机构是动力输出执行机构的直接载体,变幅—偏摆机构的稳定性、空间位置、抗冲击能力与钻机的整体性能有着密切联系。将上车联接座作为基础件,拆去底盘上车和下车,简化后的变幅-偏摆机构的三维模型如图2所示,主要由:基座部件、大臂构件、俯仰构件、钻桅部件、大臂起竖油缸、大臂摆动油缸、钻桅起竖油缸、钻桅摆动油缸等组成。
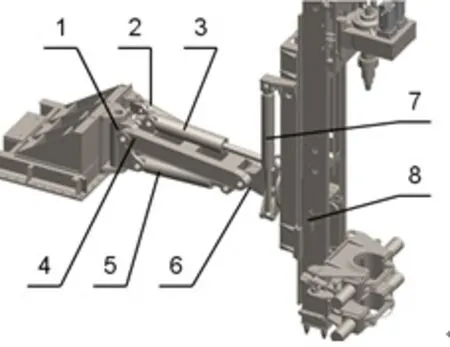
图2 变幅—偏摆机构
各个油缸的参数见表1。
主要工作和极限状态见图3。

图3 钻桅工作及极限状态
2 工作机构仿真
2.1 变幅—偏摆机构数学建模
变幅—偏摆机构是具有多个自由度的开链空间连杆机构。它由多个构件用关节串联而成,其一端固定接在机座上,而另一端则是末端执行器即钻桅。变幅—偏摆的各运动构件、油缸参数与钻桅在空间的位置、姿态之间的关系以及某速度及加速度的确定是钻机动力学研究的主要内容,也是液压、电器控制设计的基础。运动简图和坐标系的建立见图4所示。

图4 运动简图
采用Denarit-Hartenbeerg方法来描述空间杆的相对位置和姿态,任一杆件相对基座坐标系的位姿根据坐标变换公式可表示为:

在图4的运动杆件系中,钻桅的位姿采用中心点P的空间位置矢量(xp,yp,zp)T和过P点与钻桅固结的单位矢量a及b的方向余弦(l,m,n)T和(u,v,w)T来描述。此时,在坐标系O4x4y4z4中P点的坐标为(0,0,dp)T,a及b的方向余弦为(0,0,1)T和(1,0,0)T,钻桅的位姿矩阵为:

各杆件的机构参数有:d1,dp,d2=d3=d4=0;h1,h2,h3,h4;α1=α4=90°,α2=α3=0°;运动参数为:θ1,θ2,θ3,θ4,其中θ1是S1的简单函数,θ2是S2的简单函数,θ3是S3的简单函数,θ4是S4的简单函数。连接座与基座之间的位姿矩阵为M01;大臂构件与连接座之间的位姿矩阵为M12;俯仰构件与大臂构件之间的位姿矩阵为M23;钻桅与俯仰构件之间的位姿矩阵为M34,各函数分别为:


表1 各个油缸参数表
将M01~M34代入式(2),采用MATLAB软件矩阵运算功能经矩阵连乘运算可得钻桅中心点P的坐标和矢量a及b的方向余弦,将θ1,θ2,θ3,θ4用S1,S2,S3,S4替换,则得到钻桅相对基座的运动学方程。
2.2 动力学仿真
(1)简化模型。为了获得变幅—偏摆机构运动仿真的更高效率和精度,合理简化原模型特征,并采用UG的wave几何连接器功能和SW的实体组合功能,可以把没有相对运动的装配体组件转化为part零件,从而简化ADAMS的操作和提高求解速度。完成装配的模型另存为parasolid.x_t格式,然后导入到ADAMS环境中如图5(a)。
图5 ADAMS环境中的变幅-偏摆机构模型
(2)施加约束、力。如图6(b)所示,在ADAMS环境中,先完成重命名,设置材料密度,更改颜色,合并相对固定的部件等工作,利用Edit-Delete检查是否有未更改过名字的部件,删除多余部件。用Fixed Joint固定副把基座与大地固联;因为油缸两端均有关节轴承,所有对油缸连接处采用Spherical Joint球铰副;自制件的连接处采用Revolut Joint铰接副并设置摩擦系数;对油缸活塞采用Cylindrecal Joint圆柱副;油缸缸筒和活塞杆之间添加Contact三维接触;对活塞杆设置Point Motion单轴点运动。完成设置后,用Tools-Model Verify功能检查模型的状态,一共有14个运动部件,4个圆柱副,7个球铰副,6个铰接副,1个固定副,4个单轴点运动,7个自由度,没有多余的约束。
(3)变幅-偏摆机构垂直状态。给定油缸进程流量40L/min(回程20L/min)。对应φ125mm缸径,得活塞运动速度为(速比为1.55,此处针对无杆腔进行计算)

将该速度设置在钻桅起竖缸活塞杆上,令其相对钻桅起竖缸筒运动,可得大臂起竖油缸和钻桅起竖油缸反作用力曲线,如图6所示。

图6 垂直状态大臂起竖油缸和钻桅起竖油缸受力情况
在起竖过程中,钻桅起竖油缸最大推力为108753N,最大拉力为100547N,并且在6.8s时由推力变为拉力;大臂起竖油缸没有运动,受到静力作用,为152751N。开始起竖瞬间,俯仰处铰点处受到308513N冲击,之后迅速降到105624N,这时起竖变幅趋于稳定;回转处铰点受力平稳上升,最大到145687N。
(4)横向水平工作状态各油缸受力变化曲线。大臂起竖油缸和钻桅起竖油缸同时作用,钻桅在最高位置时各油缸和铰点受力如图7所示。

图7 水平状态大臂起竖油缸和钻桅起竖油缸受力情况
在起竖过程中,钻桅起竖油缸最大推力为102417N;大臂起竖油缸最大推力为48527N。开始起竖瞬间,俯仰处铰点处受到312428N冲击,之后迅速降到121475N,这时起竖变幅趋于稳定;回转处铰点最大受力48516N。
3 结语
利用ADAMS软件,建立了履带式多功能钻机的变幅-偏摆机构的动力学模型,进行了动力学与运动学仿真,并对其各个工作状态和铰点进行了分析,仿真过程可视性好、仿真结果图表丰富,提高了履带式多功能钻机变幅-偏摆机构的设计效率,分析结果可以作为变幅-偏摆机构的结构优化设计的有效参考数据,为下一系列履带式多功能钻机的设计开发提供了重要的指导。
[1]孙桓,陈作模,葛文杰. 机械原理[M]. 高等教育出版社,2006.5.
[2]靳同红,王胜春. 工程机械构造与设计[M]. 化学工业出版社,2013.1.
[3]郑建荣. ADAMS虚拟样机入门与提高[M]. 机械工业出版社,2005.
[4]陈立平,张云清. 机械系统动力学分析及ADAMS应用教程[M]. 清华大学出版社,2006.
[5]郭卫东. 虚拟样机技术与ADAMS应用实例教程[M]. 北京航空航天大学出版社,2008.6.
TU67
A
1671-0711(2017)06(下)-0117-04