末敏弹线阵激光雷达识别与定位方法研究
2017-06-23戎永杰许建胜任畅锐
苏 坡,戎永杰,许建胜,任畅锐
(中国兵器工业第203研究所,西安 710065)
末敏弹线阵激光雷达识别与定位方法研究
苏 坡,戎永杰,许建胜,任畅锐
(中国兵器工业第203研究所,西安 710065)
相比于一元激光雷达,线阵激光可以提供更加丰富的目标形体信息。为了更好的利用线阵激光雷达,文中提出了一种末敏弹线阵激光雷达识别与定位方法,并采用蒙特卡洛法对其性能进行了仿真。仿真结果表明与一元激光雷达相比,采用线阵激光雷达末敏子弹的命中点更趋于目标的中心,同时末敏子弹扫描平台的稳定性对线阵激光雷达的识别率影响较大。文中的研究结果为线阵激光雷达在末敏弹上的应用提供了基础和有价值的参考。
线阵激光雷达;末敏弹;识别与定位;蒙特卡洛法
0 引言
敏感器作为末敏弹的“眼睛”,负责探测、发现、定位目标,是末敏弹智能化的重要体现[1-2]。随着敏感器集成技术和数字信号处理技术的发展,为提高对目标识别与定位性能,线阵敏感器成为末敏弹目标探测与识别发展的趋势。作为代表的有美国SADARM末敏弹、德国SMArt末敏弹。SADARM和SMArt敏感器均采用线阵红外和毫米波复合探测体制。SADARM敏感器由13元线阵红外辐射计、8 mm毫米波雷达、8 mm毫米波辐射计和磁强计组成;SMArt末敏弹敏感器由5元线阵红外辐射计、3 mm毫米波雷达和3 mm毫米波辐射计构成[3]。
现有末敏弹的线阵敏感器基本上采用线阵红外辐射计,利用目标和背景热特性的不同,实现对目标的探测与识别,缺乏目标的形体信息。而目前,通过对目标形体进行探测,实现对不同目标的精确打击,已成为末敏弹探测技术发展的重要方面。在此背景下,线阵激光雷达及识别与定位方法成为末敏弹敏感器研究的热点。
1 模型与方法
末敏子弹进入稳态扫描阶段后,其弹载信息处理单元通过对敏感器响应信号进行分析和处理来实现目标的识别与定位。对于一元激光雷达来说,其只能提供目标在扫描切向方向的形体信息,缺乏扫描的径向信息,因而在识别目标后,会有很大概率打击到目标的边缘。具体地,当末敏子弹扫描到目标并且目标的高度和宽度满足所设的阈值,即认为目标满足一元激光雷达识别条件。一元激光雷达定位采用切向中心定位,瞄准点为在目标上扫描线的中心点。
相比于一元激光雷达,线阵激光雷达在稳态扫描时可以同时提供目标在扫描切向和径向的形体信息,因此采用线阵激光雷达在识别目标后,末敏子弹的EFP战斗部会以更大的概率命中目标的形体中心区域。图1给出单元激光雷达和线阵激光雷达对目标扫描的示意图,加粗的扫描线均为与末敏子弹EFP战斗部轴方向一致的扫描线。其中,图1(a)为一元激光雷达的扫描示意图,可以看出其可以提供目标在扫描切向方向的信息;图1(b)为线阵激光雷达扫描示意图,可以看出线阵激光雷达不仅能提供目标在扫描切向方向的信息,而且还可以同时提供目标在扫描径向方向的信息。因此,如何合理有效的利用线阵激光雷达提供的信息成为设计线阵激光雷达识别定位算法的关键。
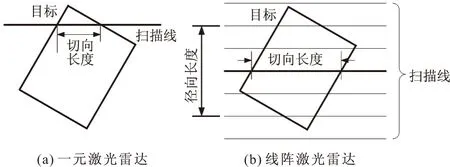
图1 单元激光雷达和线阵激光雷达目标扫描示意图
这里,采取对一元激光雷达识别定位算法进行扩展来实现线阵激光雷达的识别与定位。令N表示悬挂角呈等角间距线阵激光雷达的元数,各元激光雷达的编号分别为i=1,2,…,N,其中,中间第M元表示与EFP战斗部轴方向一致的激光元,对应的悬挂角为π/6,

(1)
某一次扫描周期内,在扫描切向方向上,记中间第M元激光雷达扫过目标的长度为lM1(如图1(a)、图1(b)中所标识的切向长度),当lM1满足下式的阈值范围时,则切向识别条件满足。
lmin1≤lM1≤lmax1
(2)
式中:lmin1、lmax1为常量,其值的设置跟待打击目标的形体尺寸相关。
在扫描径向方向上,若某采样时刻如果中间第M元激光雷达扫上目标,且此刻与第M元激光雷达连续相邻扫上目标的激光雷达范围段为j≤M≤k,则此时刻线阵激光雷达扫到目标的径向长度lM2(见图1(b)中所标识的径向长度)为:
lM2=h|tanθk-tanθj|
(3)
式中:h表示此采样时刻末敏子弹的高度;θj、θk分别表示第j元和第k元激光雷达对应的悬挂角。当满足以下条件时,则径向识别条件满足。
下午一时,我又一次躺在做气管镜的软床上,只不过医院换成了哈尔滨市第一医院,医生也换成了哈尔滨市第一医院副院长兼呼吸科主任蒋利学。
(4)
式中:lmin2、lmax2为常量,表示径向长度的阈值范围。式(4)的第二个式子保证第M元激光雷达位于扫入目标径向长度的中心。
综合式(2)~式(4)有:在一个扫描周期内,若线阵激光雷达末敏子弹能同时满足切向和径向识别条件,则目标被识别,采用切向中心定位,此时起爆EFP战斗部,会有很大概率命中目标的中心区域。
2 仿真实验与结果分析
采用蒙特卡洛法[4]对文中所提线阵激光雷达识别定位算法进行仿真评估。
2.1 仿真条件
仿真实验中,线阵激光雷达的元数N=13,各元之间悬挂角呈等角间距,相邻两元悬挂角的夹角Δθ=0.005 4 rad,第7元为与EFP战斗部轴方向一致的中间元激光雷达,其对应的悬挂角θM=π/6;固定末敏子弹进入稳态扫描时在地面的投影位置为坐标原点,子弹从初始120 m高度进入探测识别,高度低于20 m停止探测识别;装甲目标的水平面尺寸为3.5 m×7 m,采用极坐标,目标中心以等概率落入ρ~U[15.46 m,65.37 m],φ~U[0,2π]的圆环区域;末敏子弹的指标如下:转速f~U[3 r/s,4 r/s],理想转速fi=3.5 r/s;子弹落速v=10 m/s;子弹初始相位α0~U[0,2π];子弹理想悬挂角θi=π/6;旋转伞摆动振幅A=π/36 rad,摆动频率f~U[3 Hz,4 Hz],摆动初始相位ψ~U[0,2π];前置角δ~U[0.029 1 rad,0.040 7 rad],理想前置角δi=π/90;战斗部中间偏差EX~N[0 m,0.44 m2],EZ~N[0 m,0.44 m2];水平方向风的风速vw~U[0 m/s,10 m/s],风向α~U[0,2π];其他环境为标准气象环境。这里,U[a,b]表示[a,b]范围内的均匀分布;N[μ,σ2]表示服从均值为μ、方差为σ2的正态分布。
2.2 结果与分析
首先,采用蒙特卡洛法对一元激光雷达末敏子弹和线阵激光雷达末敏子弹识别与定位性能进行仿真对比,仿真次数为10 000。线阵激光雷达末敏子弹识别与定位算法参数设置为:切向下限长度lmin1=2 m,上限长度lmax1=10 m;径向下限长度lmin2=2 m,lmax2=10 m。一元激光雷达末敏子弹识别与定位算法参数设置与线阵激光雷达切向设置一致。图2给出一元激光雷达和线阵激光雷达命中点仿真结果,红色的框表示目标,黑色的实心圆点表示末敏子弹战斗部的命中点。其中,图2(a)、图2(c)分别为理想情况下(无风、伞无摆动、末敏子弹各参数均取理想值)一元激光雷达和线阵激光雷达命中点仿真结果;图2(b)、图2(d)分别为各因素综合作用下,一元激光雷达和线阵激光雷达命中点仿真结果。采用文献[4]的方法对装甲目标平面进行区域划分,统计命中点落入各个区域的百分比,统计结果见表1。从图2和表1可以看出:(i)采用线阵激光雷达末敏子弹的命中点比采用一元激光雷达末敏子弹的命中点更趋于目标的中心区域;(ii)无论是在理想情况下还是各因素综合作用下,采用线阵激光雷达末敏子弹的未识别率明显高于采用一元激光雷达末敏子弹的;(iii)线阵激光雷达末敏子弹在各因素综合作用下的未识别率远高于理想情况下它的未识别率。

表1 一元激光雷达和线阵激光雷达命中点位置统计
对于上述(i)(ii)很容易理解,一方面相比于一元激光雷达,线阵激光雷达加入了扫描径向方向的信息,导致其命中点更趋于目标的中心区域;另一方面,由于识别算法加入了更多的约束和限制,线阵激光雷达末敏子弹的识别条件比一元激光雷达苛刻,一元激光雷达识别算法可以看作是多元激光识别算法的一种特殊情况:径向识别条件中最小阈值lmin2=0。因此采用线阵激光雷达末敏子弹的未识别率高于采用一元激光雷达的末敏子弹。下面,对线阵激光雷达末敏子弹径向识别条件的参数lmin2进行仿真实验来研究其对识别率和命中位置的影响。仿真实验中分别取lmin2=2 m、lmin 2=1.5 m和lmin2=1 m。
仿真结果见图2(d)、图3及表2。图2(d)、图3(a)、图3(b)分别为lmin2=2 m、lmin2=1.5 m和lmin2=1m在各因素综合作用下线阵激光雷达末敏子弹命中点仿真结果。表2给出不同lmin2在各因素综合作用下命中点落入目标各区域的统计结果。综合表1、表2可以看出,在一定的范围内线阵激光雷达径向识别条件中最小阈值lmin2对识别率影响不大,因此,仿真条件中的其他因素是造成线阵激光雷达末敏子弹未识别率高的原因。

表2 不同lmin2命中点位置统计
在各影响因素中前置角散布、滚转角散布、战斗部散布只影响末敏子弹的命中位置,而对识别率不会产生影响;转速、水平方向的风和伞的摆动会对线阵激光雷达末敏子弹的识别率产生影响。下面,对转速、水平方向的风和伞的摆动这几个因素进行仿真试验来探究哪个因素对线阵激光雷达末敏子弹的识别率影响最大。
同样,采用蒙特卡洛法仿真10 000次,仿真实验结果为:仅转速存在散布,其他因素均为理想情况下,线阵激光雷达末敏子弹的未识别率为1.68%;仅存在水平风,其他因素均为理想的情况下,线阵激光雷达末敏子弹的未识别率为6.39%;仅存在伞的摆动,其他因素均为理想的情况下,线阵激光雷达末敏子弹的未识别率为11.87%。此实验结果表明,伞的摆动对线阵激光雷达末敏子弹的识别率影响最大,水平风的干扰次之,这三个因素均反映了末敏子弹扫描平台的稳定性。
综合3组仿真实验,可以得出:和一元激光雷达相比,线阵激光雷达可以提供更加丰富的目标形体信息,采用线阵激光雷达末敏子弹的命中点更趋近于目标的中心区域;线阵激光雷达的识别率对扫描平台的稳定性非常敏感,如何提高末敏子弹扫描平台的稳定性成为更好发挥线阵激光雷达优势的关键。

图2 一元线阵激光雷达和线阵激光雷达命中点仿真结果对比图
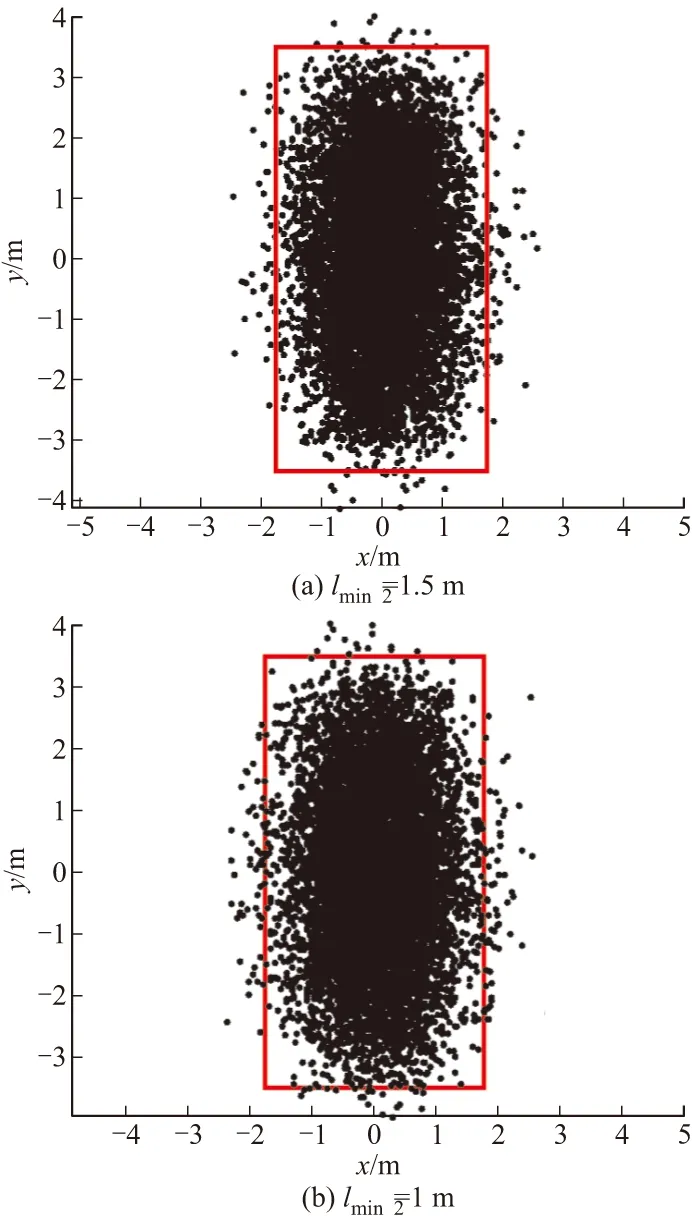
图3 不同lmin2线阵激光雷达末敏子弹命中点仿真结果
3 结论
文中对末敏弹线阵激光雷达识别与定位方法进行研究,并采用蒙特卡洛法对文中所提方法进行了仿真验证和分析。仿真结果表明与一元激光雷达相比,采用线阵激光雷达末敏子弹的命中点更集中于目标的中心区域,并且可以有效降低脱靶率;同时,也表明末敏子弹扫描平台的稳定性对线阵激光雷达识别率影响很大。为提高线阵激光雷达末敏弹的识别率,末敏弹在设计时可采用落速高、转速落速比大、稳定性好的扫描平台。
[1] 杨绍卿. 灵巧弹药工程 [M]. 北京: 国防工业出版社, 2010: 1-6.
[2] 杨绍卿. 末敏弹系统理论 [M]. 西安: 陕西科学技术出版社, 2009: 1-10.
[3] 崔瀚, 焦志刚. 国外末敏弹发展概述 [J]. 飞航导弹, 2015(2): 24-31.
[4] 许建胜, 苏坡, 戎永杰, 等. 基于蒙特卡洛法的末敏弹命中点散布研究 [J]. 弹箭制导学报, 2015, 35(6): 29-32.
[5] 王晓波, 姚俊, 马金明. 蒙特卡洛法在末敏弹毁伤概率计算中的应用 [J]. 沈阳理工大学学报, 2011, 30(5): 50-53.
Research on the Recognition and Position Method for Linear Array Laser Radar of Terminal Sensitive Projectile
SU Po,RONG Yongjie,XU Jiansheng,REN Changrui
(No.203 Research Institute of China Ordnance Industries, Xi’an 710065, China)
Compared with single-element ladar, linear array laser could provide more shape information of the targets. In order to make better use of linear array laser radar, a recognition and position method for linear array laser radar of terminal sensitive projectile was proposed in this paper. And the Monte-Carlo method was utilized for the simulation of performance. The simulation results indicated that compared with single-element ladar, the hitting points of terminal sensitive projectile using linear array laser radar were closer to the central area of the target. Meanwhile, the stability of scanning platform had great influence on the recognition rate of linear array laser radar. The results of this paper provided basis and valuable references for the application of linear array laser radar in terminal sensitive projectile.
linear array laser radar; terminal sensitive projectile; recognition and position; Monte-Carlo method
2016-07-11
苏坡(1985-),男,陕西西安人,工程师,研究方向:信号处理。
TJ414.3
A
