扩展卡尔曼滤波的有向传感器网络移动目标跟踪算法*
2017-06-19吴冰
吴冰
(新乡学院机电工程学院,河南 新乡 453003)
扩展卡尔曼滤波的有向传感器网络移动目标跟踪算法*
吴冰
(新乡学院机电工程学院,河南 新乡 453003)
针对传感器网络中跟踪目标需要大量的节点协同工作,还需要实时处理和传输大量数据,提出一种基于扩展卡尔曼滤波的有向传感器网络目标跟踪算法(EK-MTDC),重点研究了传感器网络中的扇区数量对节点间数据传输与目标跟踪精度的影响,根据对目标状态的分析,通过压缩参与监测的节点个数,选择激活网络中节点相交区域内的节点对跟踪目标进行监测。仿真结果表明,该算法能在不降低跟踪效果的前提下,降低网络能耗,延长其使用寿命。
传感器网络,目标跟踪,有向感知模型,EKF
0 引言
无线传感器网络是目前一项新兴的热点研究领域,包括传感器的检测、通信方法的优化、目标的精确定位以及高能效的数据采集机制,其集成了无线通信、微电子学及传感器技术,由于其具有成本低廉、组网方便、部署灵活、体积小等特点,加上其应用范围广泛(如智能交通、生态环境监测、目标跟踪、医疗护理)而日益受到关注,是目前IT领域一项研究热点。目标跟踪和节点定位是其应用和研究的关键点。
卢旭等人[1]提出了无线传感器网络节点自适应调度算法ANSTT。该算法依据节点对移动目标的感知能力和剩余能量水平来调整节点的工作模式,该算法依赖于部署节点感知目标的水平,不同的目标和状态其感知能力存在较大的差异。陈延军等人[2]提出了自适应动态协同自组织算法A-DCS。该算法利用设定好的检测概率选择最大检测概率的节点作为簇首,根据状态估计精度来确定参与感知任务的簇成员顺序和个数。依据不同检测概率和估计精度时相对应的能量消耗来延长网络的生命周期。该算法依赖系统检测概率的设定,而不同系统的最优检测概率各不相同,要根据经验或者实验获得,因此,无法对其概率进行量化。郑国强等人[3]提出了基于预测的动态分簇算法,该算法把目标运动过程看作高斯马尔可夫过程,由运动目标的历史轨迹优化选择分簇的簇头和簇成员,形成动态分簇实现目标跟踪。该算法前提为系统看作高斯马尔可夫过程,该过程为经典的线性回归估计,限制了其应用范围。夏候凯顺等人[4]通过引入多种事件辅助机制和基于Kalman滤波算法预测功能的节点自适应调度策略,提出了扩展卡尔曼滤波(Extended Kalman Filter,EKF)算法,实现多目标的实时跟踪。该算法主要针对的是对单个节点的观测和估计,不能全面反映系统整体。朱志宇等人[5]提出了运用分布式粒子滤波的二进制无线传感器网络目标跟踪算法,该算法主要研究的是粒子数和网络节点数量对跟踪精度的影响。通过选择信号强度最大的节点作为簇头节点,对簇头节点进行粒子采样和状态估计后,在簇头之间传递粒子及其权值。该算法的研究表明粒子数对跟踪精度的影响更大,但该算法没有将传感器网络的扇区对跟踪精度的影响考虑进去。李辉等人[6]提出基于约束策略的WSN低能耗粒子滤波跟踪算法,该算法通过约束策略得出目标估计区域,然后优化粒子采样结果来增强粒子对目标的跟踪能力。该算法依赖于对约束策略的和粒子的动态分簇,计算量过大。
笔者通过引入有向感知模型和分布式聚类的方法来解决移动目标跟踪问题,提出了基于扩展卡尔曼滤波的有向传感器网络目标跟踪算法(EK-MTDC)。其中每个簇头协调sink和目标传感器数据之间的计算和通信。为了准确定位目标和使网络寿命最大化,需要保持最少数量的传感设备处于活跃状态。为了覆盖它的工作扇区,每个簇头(CH)决定活跃传感节点的数量和传感方向。传感器节点向簇头发送目标探测信息,能通过利用从多个部件感测节点的数据更精确地估计目标的位置。簇头发送目标位置信息到sink节点。目前的相关文献中,还没有看到更好的如何利用簇头来解决运动目标跟踪问题中高效能的相关研究。最后,通过仿真实验,对比了文献[2,7]提出的跟踪方法。结果显示,笔者提出的基于有向感知模型的多传感器的目标跟踪算法有更强的自适应性,在保证更高的跟踪性和实时性的同时,降低了系统的能耗,延长了网络的生命时间。
1 有向感知模型及相关研究现状
目前采用全向传感器网络进行目标跟踪的研究成果,可以大致估算出目标的位置,但由于宽“视域(field of view)”的原因而不能得到目标的方向特性。文献[5]使用视域为直线性高方向性的传感器跟踪目标。当目标穿过该直线时,传感器检测并记录检测的时间。利用该时间信息,传感器使用一个特定的坐标系来估计目标的轨迹。但是,这种方法使用一种高度定向传感器,其视域要小很多,这导致不能覆盖整个监控区域。文献[7]提出了一种基于定向传感器网络的分布式目标跟踪算法(RDTT),网络中每个传感器都被分成不同的扇区来检测扇区中是否存在目标。每个传感器使用相邻传感器之间的协作来估计并计算目标的位置。然而,在这里,每个传感器与相邻传感器及sink通信增加了网络流量,并导致数据丢失,这将使目标的跟踪精度降低和造成能量的浪费。
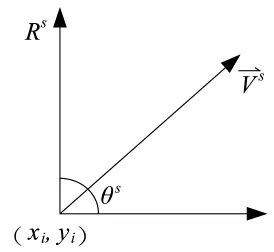
图1 感知模型
假设每个节点的感测区域被划分成几个扇区,用符号2至6来表示,并且每个扇区的检测范围是相同的。运动目标的速度小于传感器的感知频率。假设是相对应的,因为超声波传感器的最小检测时间间隔通常是2 s~10 s至3 s~10 s,一个红外传感器通常是4 s~10 s,这比目标可能的速度要高得多,还假设簇头可以在需要的时候及时唤醒其任何成员节点,一个微型传感器的典型唤醒时间为6μs,因此,通信、计算和唤醒的时间和不超过1 ms。比网络中高速运动的目标移动1m需要的时间小得多。
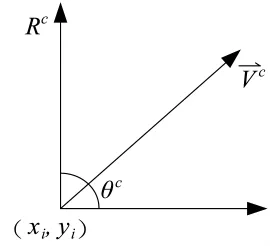
图2 通信模型
在感知模型中,一个节点可以在2至6等多个扇区进行通信,并且每个扇区的通信范围是相同的。假设在一定的时间,一个节点的感知和通信扇区可以是相同或不同的,由形成的集群和感知覆盖算法确定。
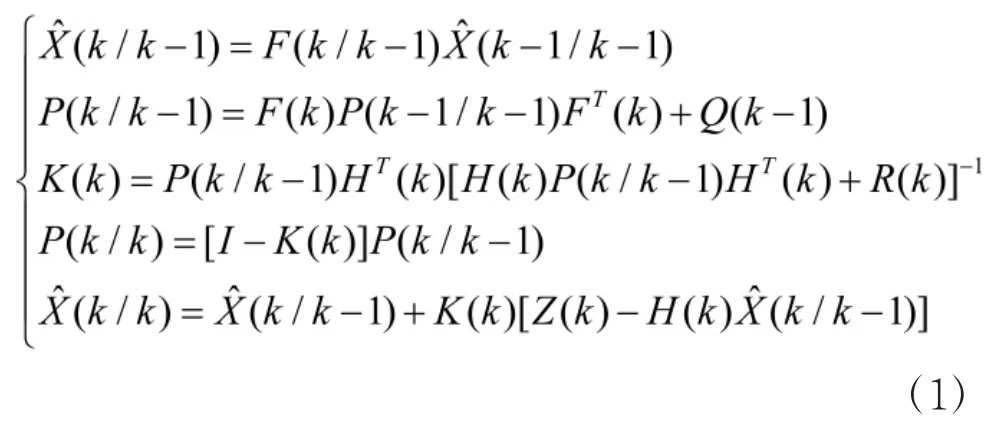
2 扩展卡尔曼滤波
扩展卡尔曼滤波(Extended Kalman Filter,E-KF)是在经典卡尔曼滤波的基础上采用最小均方误差为估计准则的一种针对非线性随机过程的滤波算法。由于其数学结构简单,采用递推的方式,上次计算得到的后验估计会作为下次计算的先验估计,每次只需由前一次的测量变量递归计算当前的状态估计,能给出系统状态变量的最优实时估计。另外其计算量小,非常方便计算机进行实时计算和处理,该特点是扩展卡尔曼滤波优于其他算法的特点之一,也比其他滤波器更容易实现。其基本方程组为[9-10]:
其原理结构如图3所示。
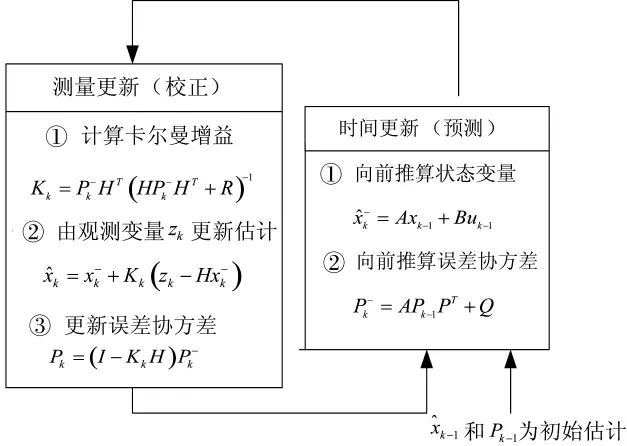
图3 扩展卡尔曼滤波器原理图
其计算过程为:①计算卡尔曼增益Kk;②测量获得zk;③按式(2)计算状态的后验估计;④按式(3)估计状态的后验协方差;
⑤计算时间更新方程;⑥测量更新方程后;⑦重复以上过程。
3 仿真分析扇区数量对目标跟踪性能的影响
对提出的算法和文献[2,7]提出的跟踪方法的精度、能耗和网络寿命通过在matlab中仿真进行对比分析。考虑目标的一般性,设定目标在半径为3 m的圆周上运动,速度大小为0.1 m/s~6 m/s,同时假定目标在不同的时间位于不同位置的跟踪范围内。考虑到测试的可靠性,根据统计原理,每个算法每次执行200 s,运行20次。通过改变通信和传感扇区的数量(从2至6变化)来评估所研究算法的性能,部署在实验区域中传感器节点的数量为500个。
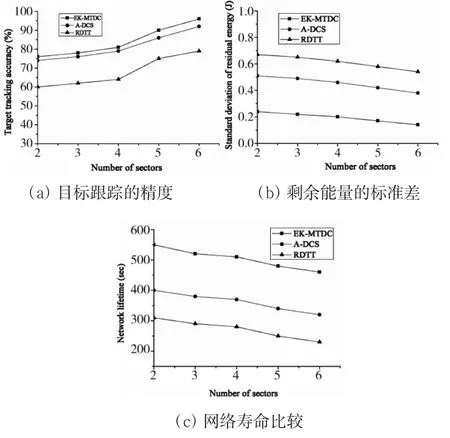
图4 传感器扇区数量的影响
图4(a)表示的是在EK-MTDC、A-DCS和RDTT算法中,目标跟踪精度随着传感扇区数量的变化。扇区数越多,弧长越短。因此,目标的路径可以更精确地从其实际路径以一个较低的偏差检测出。该图还表明,EK-MTDC算法的性能比A-DCS和RDTT算法更好,簇头运行目标覆盖算法,确定有源传感器节点及其感测方向,从而使精度较高。
图4(b)表示算法EK-MTDC、A-DCS和RDTT中剩余能量的标准差随着扇区的增加慢慢下降,从图中可以看出,由于本文提出的EK-MTDC算法中,扇区数量的增加提高了簇头可以选择激活的原来处于睡眠模式下的节点数量,所以,保留了系统能量。因此,比A-DCS和RDTT有更好的性能。
图4(c)所示为EK-MTDC、A-DCS和RDTT算法得出的随着扇区数的增加传感器网络生命周期的比较图,在所研究的协议中,因为随着扇区数的增加,系统激活大量节点的概率也会增加,因此,网络的寿命随着扇区数的增加而线性降低。
4 结论
针对现有传感器网络中目标跟踪方案使用单个传感器节点和其相邻节点的协作来检测目标位置,提出了基于扩展卡尔曼滤波的有向传感器网络目标跟踪算法(EK-MTDC),减少了网络中被激活的传感器节点,减少了数据的开销,降低了能效,提高了目标跟踪的精度。
[1]卢旭,程良伦,罗世亮.无线传感器网络自适应目标跟踪节点调度算法[J].通信学报,2015,36(4):74-84.
[2]陈延军,潘泉,王征.无线传感器网络目标跟踪性能优化及仿真[J].传感技术学报,2015,28(4):544-550.
[3]郑国强,李丽,李济顺.用于目标跟踪无线传感器网络的动态分簇算法[J].火力与指挥控制,2013,38(8):89-92+96.
[4]夏候凯顺,严娟,叶小朋,等.基于Kalman滤波的无线传感器网络多目标跟踪[J].中山大学学报(自然科学版),2014,53(02):18-22.
[5]朱志宇,苏岭东.基于分布式粒子滤波的二进制无线传感器网络目标跟踪[J].数据采集与处理,2015,30(3):564-570.
[6]李辉,刘云,王传旭,等.基于约束策略的WSN低能耗粒子滤波跟踪算法[J].传感技术学报,2015,28(11):1708-1715.
[7]HEINZELMAN W B,MURPHY A L,CARVALHO H S,et al. Middleware to support sensor network applications[J].IEEE Netw,2004,18,6–14.
[8]左现刚,刘艳昌,王建平.次优扩展卡尔曼滤波的无线传感器网络定位算法[J].火力与指挥控制,2015,40(10):69-71.
[9]伍健荣,杜向龙,刘海涛.一种基于Kalman滤波器的自适应背景建模改进算法[J].传感器与微系统,2012,31(1):52-54.
[10]罗浩,刘忠,彭鹏菲.一种应用于二进制传感器网络的目标跟踪算法[J].系统工程与电子技术,2011,33(1):21-25.
Moving Target Tracking Algorithm Based on Extended Kalman Filter in Directional Sensor Networks
WU Bing
(Department of Electrical Engineering,Xinxiang College,Xinxiang 453003,China)
For the target tracking in the sensor networks,a large amount of node need have a collaborative work with each other,at the same time,also need deal with and transfer a large amount data real-timely.In this paper,a moving target tracking algorithm based on extended Kalman Filter is proposed,This paper mainly studies on the effect of the data transmission between nodes and target tracking Accuracy with the number of sectors in the wireless sensor network.By compressing the number of nodes involved in the monitoring according to the analysis of the target state,then monitor the tracking target by the chosen nodes which are activated and intersected together in the network. Simulation results show that the algorithm can improved the life time and reduced the network energy wastage by the premise of guarantee of tracking accuracy.
sensor networks,target tracking,directional sensing model,EKF
TP393
A
1002-0640(2017)05-0076-03
2016-03-17
2016-06-18
国家自然科学基金(61501391);河南省高等学校重点科技基金(15A510035);新乡市创新平台基金资助项目(CP1504)
吴 冰(1978- ),男,河南新乡人,硕士,讲师。研究方向:测量与控制及机电一体化应用。