基于滑模控制的某型起落架落震联合仿真*
2017-06-19席剑辉
傅 莉,钟 琳,刘 昕,席剑辉
(沈阳航空航天大学自动化学院,沈阳 110136)
基于滑模控制的某型起落架落震联合仿真*
傅 莉,钟 琳,刘 昕,席剑辉
(沈阳航空航天大学自动化学院,沈阳 110136)
飞机起落架是飞机起落的安全保证。给出了在ADAMS/Aircraft中建立某型飞机起落架的虚拟样机模型,设计并实现基于磁流变液的飞机起落架滑模缓冲控制算法,通过MATLAB/Simulink和ADAMS完成了该型飞机起落架着陆缓冲联合仿真分析。经过联合仿真得到缓冲器的位移-时间曲线,速度-时间曲线,阻尼力-时间曲线等特性数据,通过与被动式起落架的缓冲性能进行比较,验证了设计的滑模控制算法能够有效提高飞机起落架着陆缓冲性能。
起落架,落震分析,滑模控制,联合仿真
0 引言
飞机起落架是飞机的重要承力部件,在飞机安全起降过程中担负着重要的使命。对于现代飞机而言,起落架已经成为关系飞机起降性能、舒适性以及成员生命安全的重要装置[1-2]。飞机起落架吸收和消耗飞机在着陆撞击、跑道滑行等地面运动时所产生的能量[3]。所以,飞机起落架的减震技术已成为当今航空领域的重要研究方向。
现代大多数飞机都采用油气式被动缓冲系统,但由于被动控制时,系统参数受到一定限制,并且不能随着外界激励的改变而改变,在飞机减震性能方面受到限制[4-5]。主动控制虽然可控性强和减震效果好,但主动控制方法具有价格高、耗能高、结构复杂等缺点。半主动控制介于被动控制和主动控制之间,具有价格低、耗能低、可靠性强等优点[5-7]。本文采用滑模控制算法,以磁流变减震器作为半主动控制装置,进行飞机起落架的落震动力学联合仿真分析。
1 建立起落架虚拟样机模型
本文利用ADAMS/Aircraft模块建立飞机起落架虚拟样机的模型。在ADAMS/Aircraft中建立起落架虚拟样机的模型时,需要将各个部件封装成子系统再组装成一体[8]。因为起落架系统大多为空间运动机构,存在多个坐标系,设计极其复杂,本身结构的零部件很多,关系交错复杂,干涉较多,所以本文选用在Standard下利用自带模板进行建模[9]。
选择与实际起落架结构相近似的模板来建立子系统,并对建立好的模型进行修改,使共享数据库中的模板与实际需求的飞机起落架相近,修改的内容主要包括:硬点位置的修改,缓冲器支柱以及各种撑杆、轮轴的修改,空气弹簧性质的修改等[10-11]。便可得到起落架虚拟样机模型,如图1所示。ADAMS和Matlab进行联合仿真时,它们之间要有信息的交换,ADAMS要把起落架缓冲器的当前位置、速度等信息传递给Matlab,而Matlab要根据控制算法得出实时阻尼力,再传递给ADAMS的起落架模型,使控制系统尽快达到稳定。对于ADAMS模型来说,就要有相应的输入和输出状态变量。所以,这里创建一个输入状态变量:缓冲器阻尼力F,两个输出状态变量:缓冲器的移动速度V和位移S,以便和Simulink中的滑模控制系统实现数据交换,实现联合仿真。

图1 起落架虚拟样机模型
2 起落架滑模控制算法
本文采用滑模控制,设计适当的切换函数和变结构控制律,使系统的状态轨迹在有限时间内达到所设计的切换面,实现滑动模态运动[11],保证滑模运动渐进稳定并具有良好的动态品质[12-13]。正确实施滑模控制,需要保证滑动模态的存在性,滑动模态的可达性及滑模运动的稳定性。
本文中的起落架数学模型采用二质量模型。把起落架的结构质量分为两个集中质量,这两个集中质量分别是:弹性支撑质量和非弹性支撑质量。
根据起落架二质量模型,建立如图2所示基于磁流变阻尼器的飞机起落架数学模型[14-16]。其中M1为起落架的弹性质量,M2为起落架非弹性质量。K1为起落架的刚度系数,K2为起落架的轮胎刚度系数,Z1为弹性质量的位移,Z2为非弹性质量的位移,U为磁流变阻尼器的控制力[17-18]。磁流变阻尼器采用Bingham模型,阻尼力表达式如式(1)所示:

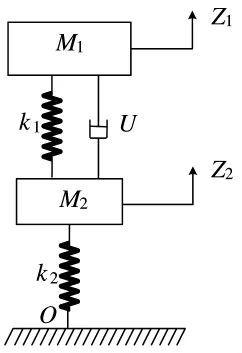
图2 起落架数学模型
得到起落架的动态模型如下,并令
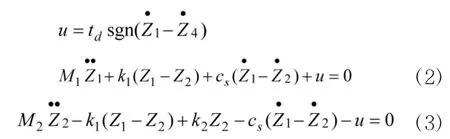
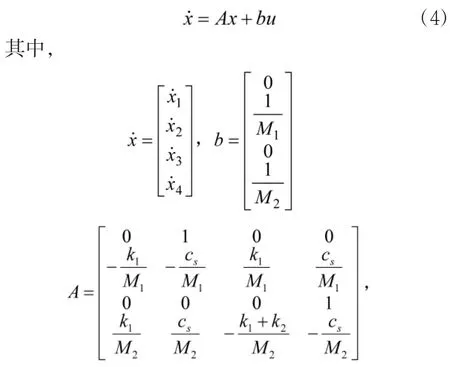
则系统的状态方程为:
接下来,设计滑模控制面。首先,设计切换函数以确定系统的滑动模态方程。本文采用极点配置的方法来设计滑模控制面。
设切换函数为:

根据线性系统理论极点配置定理,对单输入n维连续时间线性时不变系统,系统全部n个极点可以任意配置的充分必要条件是(A,b)完全能控。在判断系统完全能控的条件下,计算矩阵A的特征多项式。有

计算能控规范型变换矩阵,
将状态方程转化为能控标准型,

其中C2为可逆方阵,在切换面上有

从而滑模运动满足式(10)和下列降阶方程

可以根据线性系统理论中的状态反馈设计方法来设计F矩阵,进而求得系统反馈矩阵F。不失一般性,取C2=I1,因此

下面根据极点配置的方法来配置反馈矩阵F。
由于C2设置为单位阵,因此,系统需要设置3个极点,这里设为,则期望的特征多项式方程为

比较式(13)、式(14)的系数,可以得到反馈矩阵F,

将式(7)、式(15)带入式(12)中,即可得到切换函数S(x)。
接下来,设计滑模控制率,滑模变结构控制的实现就是通过对控制率ui(x)的设计来实现的。本文采用常值切换控制。根据广义滑模条件,将式(4)和S(x)带入该条件得到

由于本控制系统为单输入系统,所以控制式为
根据式(16)、式(17),要使控制满足滑模控制条件,系统控制需满足

设置该系统的控制率为式(19),其中ε为控制的强度。

3 起落架MATLAB与ADAMS的联合仿真与结果分析
为了进行ADAMS与Matlab的联合仿真,需要将Adams中已经建立好的飞机起落架系统导入到Matlab中,作为Matlab/Simulink中的一个子系统,以便在Matlba中利用Simulink仿真模块搭建联合仿真系统,从而实现机械系统与控制系统的联合仿真,仿真示意图如图3所示。为了顺利进行联合仿真,设置联合仿真输入参数如表1所示。启动联合仿真,即可得到联合仿真的结果,并将滑模控制下的缓冲器缓冲性能与被动控制的缓冲器缓冲性能的仿真结果进行对比分析。
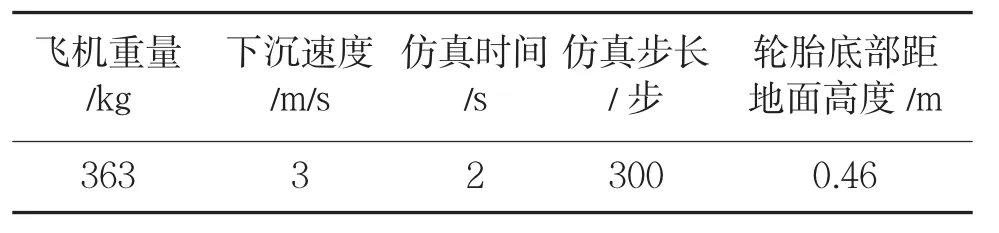
表1 输入参数设置
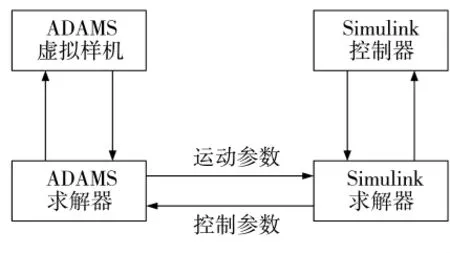
图3 ADAMS与Simulink联合仿真
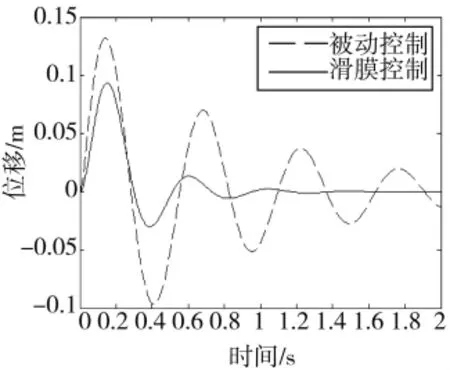
图4 缓冲器行程-时间曲线
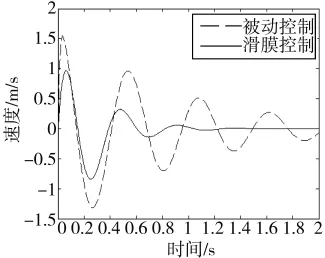
图5 缓冲器速度-时间曲线
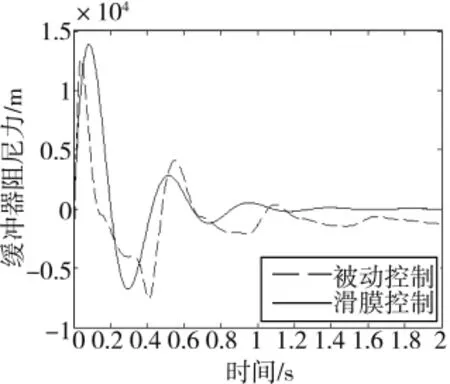
图6 缓冲器阻尼力-时间曲线
利用仿真结果图来对比两种控制下起落架缓冲器的缓冲性能,由图4的缓冲行程-时间曲线可以看出,滑模控制下起落架缓冲系统震荡的幅度明显减小,起落架缓冲系统能够快速达到稳定。由图5的缓冲器速度-时间曲线可以看出滑模控制下速度变化率小,且响应时间短,能提高乘坐人员的舒适性。总体来看,滑模控制能有效降低缓冲器峰值载荷,提高缓冲器的缓冲效率。
4 结论
本文从实际应用出发,对飞机起落架缓冲器的缓冲性能进行了研究。由联合仿真的结果得出,该型飞机起落架采用基于磁流变液的滑模缓冲控制算法后,缓冲器能有效减小飞机在着陆时的冲击载荷,能够使缓冲器的控制变量快速达到平衡,鲁棒性好,可使缓冲器缓冲效率有明显提高。采用联合仿真的方法,比单纯动力学模型更真实,得到的结论更可靠。联合仿真在该型起落架上的完美实现,验证了磁流变缓冲器的性能优越,具有重要的现实意义和工程应用价值。
[1]范伟.飞机起落架着陆半主动控制仿真研究[D].南京:南京航空航天大学,2006.
[2]郑凯,胡仁喜,陈鹿民.ADAMS2005机械设计高级应实例用[M].北京:机械工业出版社,2006.
[3]汪岸柳.飞机着陆滑跑动力学控制与仿真[D].南京:南京航空航天大学,2005.
[4]KARL I,STEVEN D.Traction control of wheeled robotic vehicles in rough terrain with application to planetary rovers[J].The InternationalJournalofRoboticsResearch,2004,23(10-11):1029-1040.
[5]YANG G,SPENCER JR B F,CARLSON J D,et al. Large-scale MR fluid dampers:modeling,and dynamic performance considerations[J].Engineering Structures,2002,24(3):309-323.
[6]廖昌荣,陈伟明.磁流变阻尼器件设计中若干技术问题探讨[J].功能与器件学报,2001,7(4):345-349.
[7]YADAV D,RAMAMOORTHY R P.Nonlinear landing gear behavior at touchdown[J].Journal of Dynamic Systems,Measurement and Control,Transactions of the ASME,1991(113):677-683.
[8]周云,谭平.磁流变阻尼器控制理论与技术[M].北京:科学出版社,2007.
[9]晋平,聂宏.起落架着陆动态仿真分析模型及参数优化设计[J].南京航空航天大学学报,2003,35(10):498-502.
[10]史佩,宋岩,岳艳丽.基于LMS Virtual.Lab的直升机起落架着陆载荷分析[J].四川兵工学报,2014,35(12): 13-16.
[11]任志勇,王惟栋.MSC Adams在飞机起落架落震仿真中的应用[J].计算机辅助工程,2006,15(1):42-43.
Research on a Type of Landing Gear Drop Co-Simulation Based on Sliding Control
FU Li,ZHONG Lin,LIU Xin,XI Jian-hui
(School of Automation,Shenyang Aerospace University,Shenyang 110136,China)
Aircraft landing gear is safety guarantee for air passenger when aircraft is rising and falling.The virtual prototype model of an aircraft landing gear is established in ADAMS/Aircraft in this paper.The sliding mode control algorithm based on magneto-rheological fluid is designed and implemented on aircraft landing gear.The aircraft landing gear Co-Simulation was completed with MATLAB/Simulink and ADAMS.The aircraft landing gear co-simulation obtain characteristic data,displacement-time curve,velocity-time curve,damping force-time curve,and compared with the passive landing gear cushioning properties.The sliding mode control algorithm can effectively improve aircraft landing gear cushioning properties.
landing gear,analysis of the drop,sliding mode control,co-simulation
V226
A
1002-0640(2017)05-0072-04
2016-02-09
2016-05-17
国家自然科学基金(61074090);中航创新基金(cxy2013SH16);辽宁特聘教授项目(15021637);辽宁省教育厅科学技术研究基金资助项目(L2014069)及(L2013070)
傅 莉(1968- ),女,辽宁凤城人,博士。研究方向:模式识别与智能系统。