运输车升降机构的运动仿真分析
2017-06-07王统顺李娜孙涛秦录芳
王统顺,李娜,孙涛,秦录芳
运输车升降机构的运动仿真分析
王统顺,李娜,孙涛,秦录芳
(徐州工程学院机电工程学院,江苏徐州221008)
对运输车的主要运动构件的运动进行分析,利用C reo3.0软件对机构的三维造型、装配和运动仿真分析完成运动构件的虚拟设计,通过运动仿真分析验证了本设计的合理性,为进一步的机构设计优化奠定了基础。
升降机;丝杠;剪叉杆;仿真
当今社会,电子商务和网络购物极大地推动了我国快递行业的发展。然而随着经济技术的发展,人工运货已经不能满足市场的需求,存在人力资源消耗大、劳动强度大、货物转运效率低和物品数量损坏高等问题。
解决上述问题的重要技术手段是采用智能车辆。
国外智能车辆的研究已经进入了深入、系统、大规模研究阶段。最为突出的是,荷兰的Combi road系统采用无人驾驶的车辆往返运输货物,它行驶的路面上采用了磁性导航参照物,并利用一个光阵列传感器去探测障碍[1]。日本大阪大学的Shirai实验室所研制的智能小车,采用了航位推测系统(Dead Reckoning System),分别利用旋转编码器和电位计来获取智能小车的转向角,从而完成了智能小车的定位[2]。虽然我国在智能车辆技术方面的研究总体上落后于发达国家,并且存在一定的技术差距,但是仍取得了一系列的成果[3]。
对于快递运输车来说,升降机构为连接载货机构和动力装置上下两部分的重要连杆机构,也是快递车能否将货物从各个不同高度的集货平台将快递快速转运的重要组成部分,其稳定性影响到快递车的工作效率和整车性能。
本文利用Creo3.0软件对升降机构进行虚拟设计,以充分反映设计意图和机构运动过程,并通过运动仿真得到丝杠剪叉式升降机构的位移、速度和加速度等运动学参数,通过分析验证了本设计能够满足智能快递运输车的设计要求。
1 快递运输车升降机构的设计要求
智能快递运输车用于快递集货点和货车之间货物的快速转运,根据设计要求和实际工作需求,运输车包括载货机构、升降机构、动力装置和电子控制装置。外形尺寸为1.2 m×0.6 m×1.2 m,且为适应各式货车车厢的高度,设计两层剪叉杆,杆长为0.8 m,剪叉杆最大倾角为60°,底盘高度为0.4 m,此时货箱底部距地面为1.6 m以上,适合大多货车和集货点平台的高度。
其中升降机构作为快递运输车载货装置在运行过程中实现升降功能的关键机构之一,根据智能快递运输车的应用场合和工作效率,升降机构应具有以下设计要求:
(1)当智能快递运输车正常工作时,货箱升降机构应能控制货箱升降高度,保证货箱在最佳的工作高度。
(2)当智能快递运输车重载时,根据控制信号将货箱从最低位置抬升至较高位置时,货箱在升降机构作用下将按要求平稳抬升至指定高度,此时货箱升高,将叉杆与水平面夹角由小变大,丝杠提供的水平推力由大变小,从而降低丝杠在货箱升高状态下的轴向载荷。
(3)为保证车体在正常工作时,车体不会发生过大的震动和摇晃,货箱抬升连续平稳,速度变化小。
目前市场上使用的升降机构主要有液压剪叉式、升缩式、套筒式、升缩臂式和折臂式等。而丝杠剪叉式升降机构是利用直流减速电机作为原动机,丝杠副和螺纹副相互配合带动剪叉杆,将旋转运动转换为直线运动,并能同时进行能量和力传递[4],具有定位精度高,传动效率高,使用寿命高的优点;减速电机具有能耗低,减速机效率高达95%,振动小,噪音低,节能高的优点;剪叉杆具有结构稳定、故障率低、运行可靠、安全高效、维护简便等一系列优点[5]。如图1所示,本文的丝杠剪叉式升降机构由伺服电机、联轴器、连接板、支撑杆、滑杆、销钉、滚珠轴承、滑动轴承、坐式轴承、连杆、丝杠螺母、支撑架等构件组成。连杆由销钉和轴承固定连接成剪叉杆,剪叉杆上下两边各与连接板成销钉连接,上下连接板分别固定在支撑架上,滑动轴承安装在下连接板两侧与滑杆配合实现水平运动和支撑的作用,丝杠螺母位于连接板中间与丝杠配合,将丝杠旋转运动转换为连接板的直线运动,通过调节连接板的位置来实现货箱的升降,从而满足设计要求。

图1 丝杠剪叉式升降机构的运动原理
本论文通过运动仿真对升降机构的运动特性和各方面参数进行研究和分析,以验证升降机构的设计合理性。
2 快递运输车升降机构的虚拟设计
Creo3.0基于特征的参数化设计,具有很强的零件设计和装配功能。用Creo3.0的造型特征和装配(assembly)模块对升降机构进行零件三维造型、装配,并定义运动关系。利用机构(mechanism)模块进行运动仿真,能够实现装配后机构的模拟运动,从而检查机构的动作是否达到设计的要求、检查工作装置运动中各元件之间是否发生干涉,可以观察和记录运动仿真全过程或一些感兴趣的测量值,如某些点的位置、速度、加速度、受力,以及运动部件的轨迹曲线和运动包络线等[6]。本文采用Creo3.0软件,通过零部件的三维造型、装配和运动仿真分析完成升降机构的虚拟设计。
2.1 零部件的三维造型
利用Creo3.0软件的造型特征(如拉伸、旋转、倒角和阵列等)完成升降机构各零部件的三维造型。如图2所示为剪叉式升降机构零部件的实体模型。

图2 剪叉式升降机构零部件的实体模型
2.2 升降机构的装配
按照升降机构各零部件的作用和装配顺序,利用Creo3.0中的装配模块(如销钉定义、刚定义和圆柱定义)完成丝杠剪叉式升降机构的装配,如图3所示。丝杠剪叉式升降机构的运动过程为:减速电机通过联轴器带动丝杠转动,从而推动连接板作直线运动,连接板同时带动两根连杆运动,连杆再由其剪叉结构实现货箱的升降。
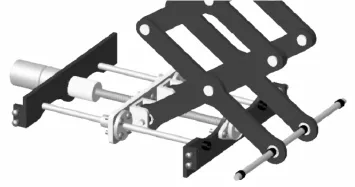
图3 剪叉式升降机构的装配模型
2.3 剪叉式升降机构的运动仿真分析
在Creo3.0的机构模块中,单击“拖动元件”,将丝杠剪叉式升降机构中的连接板拖动到距离联轴器最近的位置,并拍下快照。单击【插入】选项卡里的“伺服电动机”按钮,在“类型”中选择滑杆的轴作为“运动轴”;在“轮廓”的“规范”中选取“速度”,然后在“模”中选择“常数”,并定义为5单击确定;单击【分析】选项卡里的“机构分析”,在类型中选择“运动学”,设置“开始时间”为0,“终止时间”为14,“初始配置”择“Current”,电动机选择ServoMotor1,点击“运行”,如图4所示。按照以上步骤和方法,将锁止板拖动到距离联轴器最远的位置拍下快照,并定义第2个“伺服电动机”,“运动轴”的方向为反向,设置第2个“机构分析”,把“初始配置”设置为“Current”,电动机选择ServoMotor2,点击运行。最后选择【分析】选项卡中的“测量”,点击“创建新测量,分别创建“位置”、“速度”、“加速度”3个测量类型,选择货箱左上角一点作为测量点。

图4 升降动画仿真界面
如图5所示,升降机构分别在上升和下降过程中时,货箱的位移曲线连续平滑,并且位移变化量为500~1 700 mm,满足货箱升降高度的设计要求。

图5 货箱的位移曲线
剪叉杆升降机构分别进行上升和下降运动,货箱速度和加速度的仿真结果如图6、图7所示。结果表明在上升和下降过程中,货箱靠近最高位置时的速度和加速度的变化幅度较货箱靠近最低位置时的速度和加速度的变化幅度要小,这反映在整车重心较低时货箱快速上升或下降,节省了行程时间;在整车重心较高时以低速运行,车体不会发生过大的震动和摇晃,货箱抬升连续平稳,速度变化小,保证了车体的稳定性。

图6 货箱的速度曲线

图7 货箱的加速度曲线
3 结束语
(1)对快递运输车的升降机构进行虚拟设计,确定其设计要求。
(2)对丝杠剪叉式升降机构建立三维实体模型,利用Creo3.0软件较准确地得到丝杠剪叉式升降机构的位移、速度和加速度等运动学参数。
(3)通过分析验证了升降机构能够满足智能快递运输车的设计要求。
[1]Bishop R.A survey of intelligent vehicle applications world wide[C].Intelligent Vehicles Symposium(Proceedings of the IEEE),2000:25-30.
[2]Fang L,Antsaklis P J,Montestruque L A,et al.Design of a wireless assisted pedestrian dead reckoning system-the Nav Mote experience[J].Instrumentation and Measurement,2005,54(6):2342-2358.
[3]徐友春,王荣本,李兵,等.世界智能车辆近况综述[J].汽车工程,2001,23(5):289-295.
[4]孙恒,陈作模,葛文杰.机械原理[M].北京:高等教育出版社,2006.
[5]邓宏光,孙大刚,游思坤,王海滨.剪叉式升降平台建模及关键参数研究[J].机电工程技术,2005,34(7):20-22.
[6]康海洋,洪瑛.基于Pro/E Mechanism的挖掘机工作装置运动仿真[J].机械,2007,34(10):43-45.
Kinematic Simulation Analysis of Lifting Mechanism of Transporter
WANG Tong-shun,LI Na,SUN Tao,QIN Lu-fang
(School of Mechanical and Electrical Engineering,Xuzhou Institute of Technology,Xuzhou Jiangsu 221008,China)
The analysis of the main moving components transport vehicle motion,virtual design complete movement component analysis using Creo3.0 software of 3D modeling,assembly and motion simulation,validate the rationality of the design by simulation analysis,which laid the foundation for the further optimization design of the mechanism.
elevator;screw;fork rod;simulation
TH13
A
1672-545X(2017)02-0040-03
2016-11-01
项目编号:江苏省大学生实践创新训练计划省级重点项目(项目编号:XCX2016011)
王统顺(1995-),男,江苏连云港人,本科,研究方向:机械设计制造及其自动化。