基于STC12C5A60S2的智能四驱小车的设计
2017-06-06舒金意咸宁职业技术学院
舒金意 咸宁职业技术学院
基于STC12C5A60S2的智能四驱小车的设计
舒金意 咸宁职业技术学院
本产品采用一块STC12C5A60S2单片机作为控制核心,辅以四驱小车循迹模块、电源及电机驱动模块,构成了一个能够自动循迹的智能四驱小车。利用超声波传感器检测道路上的障碍,控制电动小汽车的自动避障,快慢速行驶,以及自动停车,自动寻迹功能。
STC12C5A60S2单片机 光电检测器 PWM调速 电动小车
1 系统设计
1.1 设计功能要求
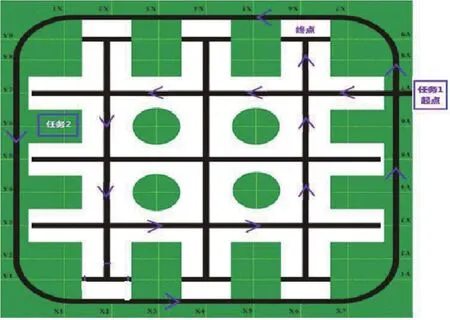
循迹:根据图纸要求,在赛道上先进行外圈循迹时遇到障碍物后能后退在相应路口进入内圈循迹。
1.2 设计电路框图
选用STC12C5A60S2单片机为核心,辅以必要的模拟,数字电路,四驱小车循迹模块,电源及电机驱动模块,构成了一个能够自动循迹的智能四驱小车。
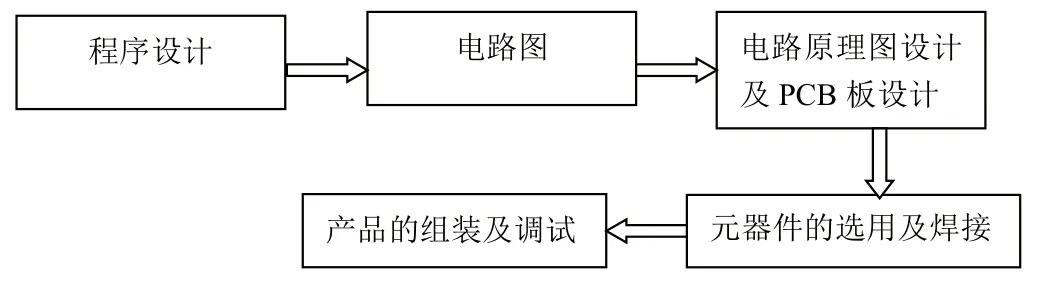
图1 系统设计框图
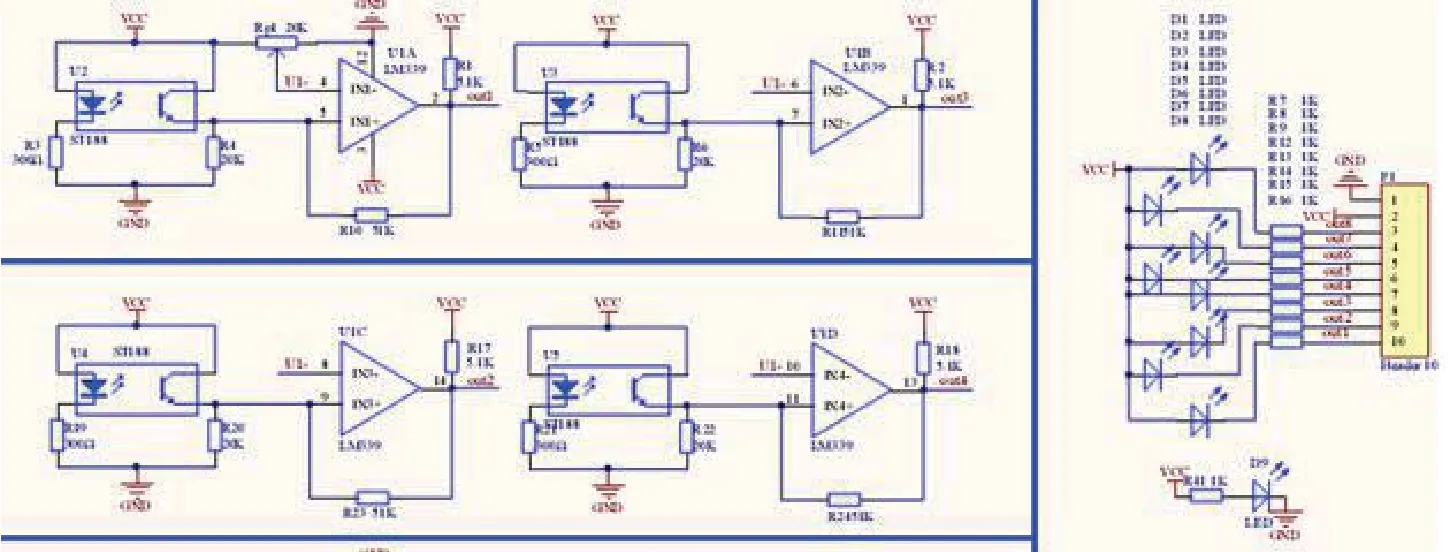
图2 四驱小车循迹模块部分电路原理图
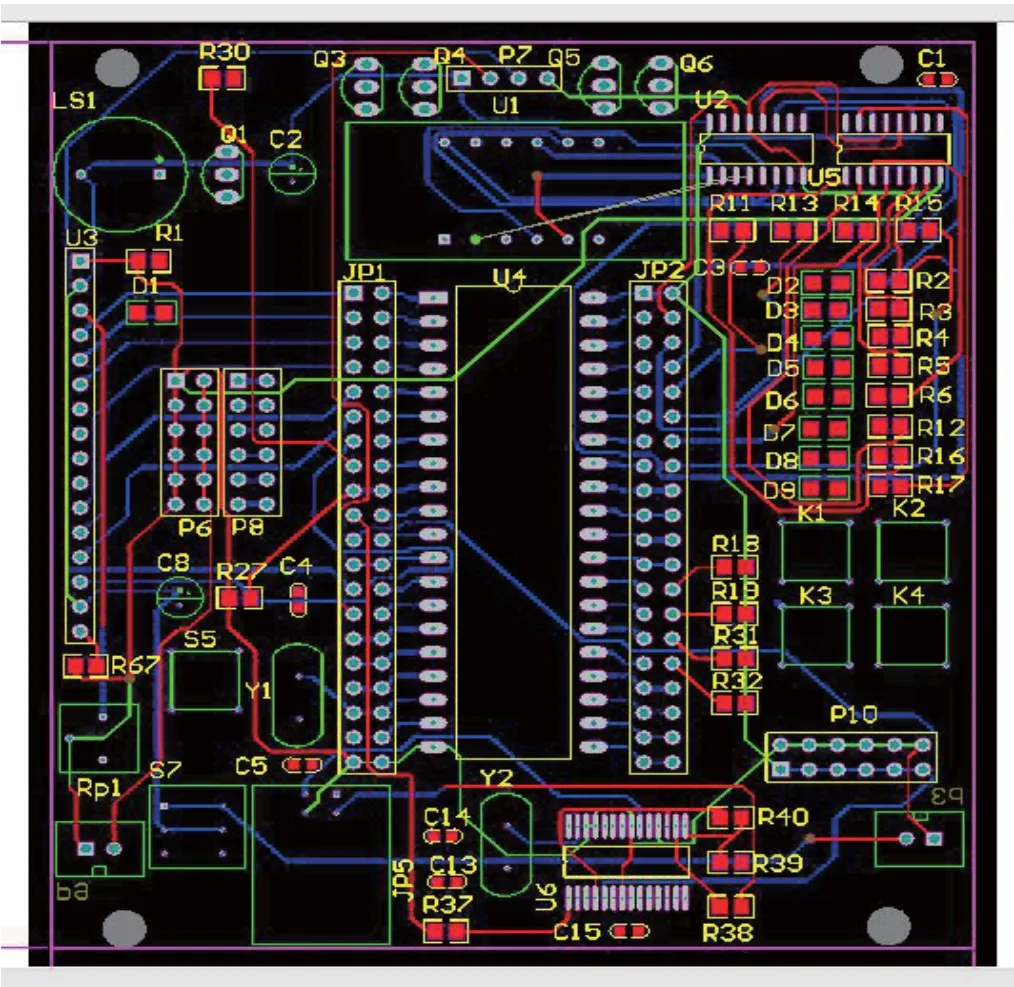
图3 四驱小车主控板的PCB板图
2 电路原理图及PCB版图绘制
2.1 电路原理图的绘制
使用Altium Designer Summer 09软件进行原理图的绘制。将已给的电路图上的元器件找出放置在电路原理图中,在放置的过程中用TAB键来更改元器件的参数。接着进行相应的电气连接,此过程应避免连接错误,完成后应使用软件自带的编译功能进行查错。
2.2 PCB板的绘制
在已完成的电路原理图上,进行PCB的设计。首先创建一个PCB文件,使用布线工具绘制PCB板的物理大小,在禁止布线层中规定有效的电气框图。接着将电路原理图中的元器件导入到PCB板上,进行元器件的布局,布局中应参考电路原理图,遵照“先大后小,先难后易”的原则。
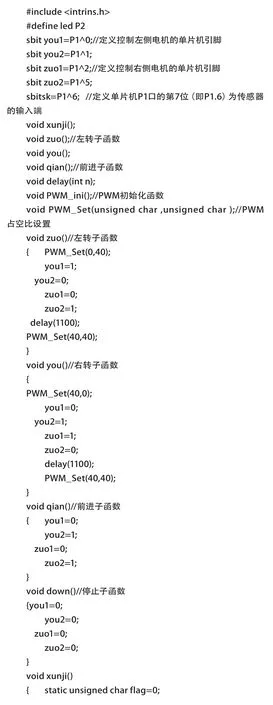
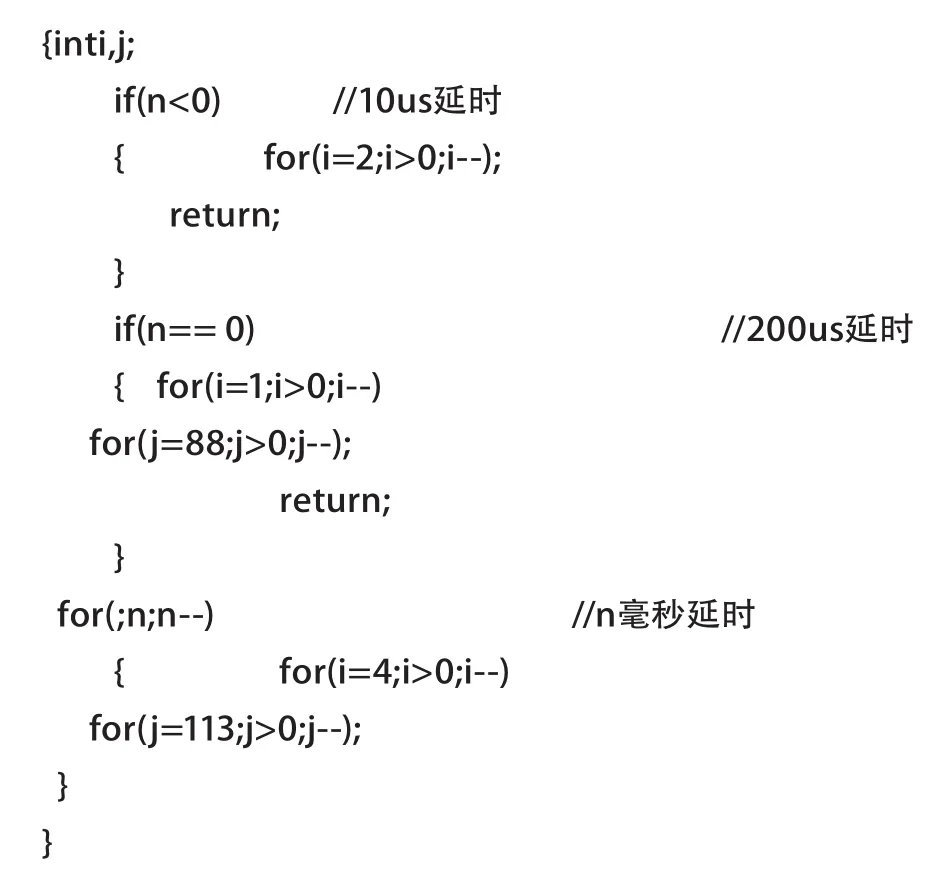
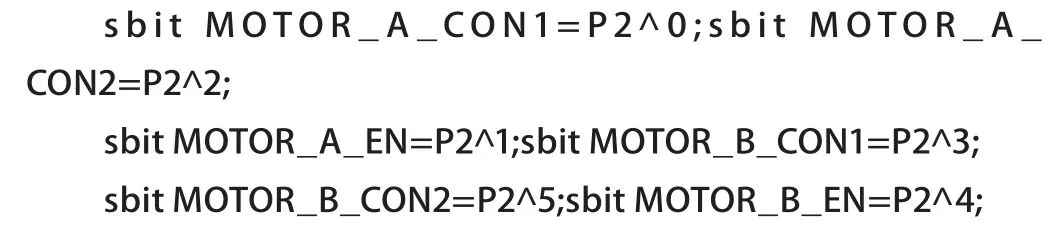
3 部分程序清单
程序清单表及释义

4 小车安装与调试过程
4.1 电路板的焊接并调试
按照元器件清单将主控板、八路循迹模块和电源及电机驱动板焊好,调试并检测各电路板,确保功能正常。
4.2 四驱小车下底盘部件的安装
第一,电池盒的安装:选定相应底板,在底板后面有一方框中有“电池盒”字样,把电池盒安装在其上面,电池盒可左右活动以方便电池安装与拆卸。注意:只能有一个螺钉固定,不然安装电机时面积不够。
第二,电机与车轮的安装:先将底板上的“T”整理出来,一个电机用两个“T”物和2个螺丝(φ3×30)加2个螺帽固定。找一个可以固定的位置,将一个“T”物品插入内侧,再找另一个“与T”物品在另一边,将电机放到中间,将螺丝和螺帽依次固定上。
4.3 循迹模块的安装
第一,底板铜柱的安装:找准下底板上最前面5个小孔中靠左右两边的2个小孔。先将螺丝从反面插上来,将铜柱拧上去固定,再将循迹模块放在上面,用螺丝固定。
第二,杜邦线的连接:将8根循迹用的杜邦线与循迹板引脚“OUT1~OUT8”对应相连。循迹数据接口和电源接口与主控板上定义的端口对应的接上。注意:接线时要完全的接触,不能接错,不然达不到预计的效果。
4.4 四驱小车上底盘部件的安装
4.4.1 电源及电机驱动模块的安装
第一,上底板铜柱的安装:先找准上底板上最后面“电源及电机驱动位置”字样,上面有一白色的矩形边框,就是电源及电机驱动模块的安装位置,先将螺丝从反面插上来,将铜柱拧上去固定,再将电源及电机驱动模块放在上面,用螺丝固定。
第二,杜邦线的连接:将6根电机驱动用的杜邦线分别与上底板上的“ENA、IN1、IN2、IN3、IN4、ENB”对接,2根给主控板提供电源的总线分别与“+5V、GND”插口对接。注意:接线时要完全的接触,不能接错、接反,不然达不到预计的效果。
4.4.2 主控板模块的安装
第一,上底板铜柱的安装:先找准上底板上中间“主控板位置”字样。上面有一白色的矩形边框,就是主控板模块的安装位置,先将螺丝从反面插上来,将铜柱拧上去固定,再将电源及电机驱动模块放在上面,用螺丝固定。
第二,杜邦线的连接:将2根电源及电机驱动上给主控板提供电源的总线与主控板上反面的“+5V、GND”插口连接。
5 上电测试
5.1 直流电机管脚配置
5.2 电源及电机驱动板与主控板之间的连接:

5.3 循迹板与主控板之间的连接:

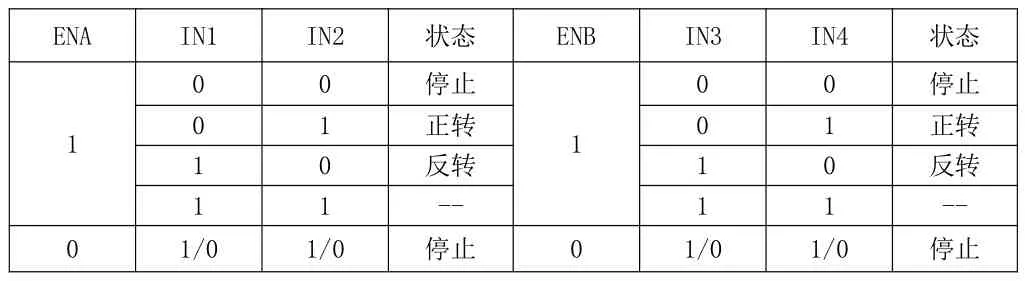
5.4 逻辑运算状态
5.5 简单测试
从小车板子上引出电源VCC和地线GND给IN1/IN2或IN3/ IN4送以1/0或0/1信号,ENA/ENB悬空或输入高电平,相应的电机则会转动,说明小车测试正常没有问题。
6 使用注意事项
①安装电池时,一定要注意电池的正负极,切勿装反。
②长期不使用电池时,请将电池从电池盒中取出。
③不要让小车长时间运行在堵转状态(堵转状态:由于小车所受阻力过大,造成车轮打滑或停止的现象),这样会造成很大的堵转电流,有可能会损坏小车的控制电路。
经过上述的软硬件程序设计,完成了利用超声波传感器检测道路上的障碍,控制电动小汽车的自动避障,快慢速行驶,以及自动停车,自动寻迹功能。在此设计基础上,还可以进一步增加一些其他的功能,比如在途中遇到火灾避火,能进行汽车入库等功能。
[1]王静霞,单片机应用技术,北京:电子工业出版社,2014
[2]李罡,邱育松.智能电动小车设计与开发[J].白城师范学院学报,2012,(05):30-33
[3]余炽业,宋跃,雷瑞庭.基于STC12C5A60S2的智能循迹小车[J].实验室研究与探索,2014,(11):46-49+121
[4]付强.Altium Designer软件在电路设计中的应用[J].科技传播,2011,(14):165-166
[5]王文华.基于80C51单片机的智能小车设计[J].山西电子技术,2010,(04):9-10+13