植保无人机动态变量施药系统设计与试验
2017-06-05王大帅张俊雄张顺路张文强
王大帅 张俊雄 李 伟 熊 斌 张顺路 张文强
(中国农业大学工学院, 北京 100083)
植保无人机动态变量施药系统设计与试验
王大帅 张俊雄 李 伟 熊 斌 张顺路 张文强
(中国农业大学工学院, 北京 100083)
针对我国植保无人机施药系统控制方式单一,施药流量无法根据飞行参数自动调整造成的雾滴分布不均匀、重喷、漏喷等问题,设计了基于ARM架构单片机的施药控制系统,提出基于PWM(脉宽调制)的施药流量控制方法,采用多传感器融合技术,实现施药参数的实时动态监测。设计了基于LabVIEW的地面站控制软件,实现对施药系统的远程控制和作业数据存储。基于3CD-15型单旋翼无人机平台对动态变量施药系统实际作业性能及施药效果进行了测试。试验结果表明,在飞行速度为0.8~5.8 m/s时,该动态变量施药系统可实现施药流量与飞行速度自动匹配,实际流量与理论流量之间平均偏差为1.9%,实际施药作业优选飞行速度为3.91~5.10 m/s,此时有效喷幅为5 m,雾滴覆盖密度为18~41个/cm2,变异系数为34%~75%,雾滴沉积量为42.1~52.4 μg/cm2。
无人机; 变量施药; 飞行速度; 脉宽调制; 流量
引言
影响植保无人机施药效果的因素具有多样性,集中在施药系统参数、飞行参数和环境参数等[1-2]方面,国内外学者对此进行了相关研究。FRITZ等[3-4]研究了气象条件和喷头类型对航空施药雾滴沉积和雾滴飘移的影响,指出风速是影响两者最显著的因素。BOUSE[5]用气流模拟飞机喷雾作业环境,针对不同类型的喷嘴进行了雾滴沉积效果测试,结果显示喷嘴喷雾压力、喷雾角度及飞机飞行速度对施药效果影响显著。HUANG等[6]设计了一种针对全自主飞行无人机的低容量喷雾系统,测试了4种不同喷嘴的喷雾效果。KRIK[7]建立了喷嘴口径、喷射角度、喷雾压力和飞行速度与施药质量之间的模型,对雾滴沉积和雾滴飘移的影响因素进行了研究。胡炼等[8-10]设计了无人直升机风场无线传感器网络,并研究了单旋翼和多旋翼无人机辅助授粉时不同作业参数下作物冠层风场分布规律,为无人机辅助授粉技术的发展提供参考。王昌陵等[11]提出了一种无人机施药雾滴空间质量平衡测试试验方法,通过机载GPS和北斗定位系统有效获取飞行参数,并可获取无人机施药雾滴空间分布情况及下旋气流场分布情况。薛新宇等[12-14]采用流体力学仿真和实际实验相结合的方式研究了无人直升机喷雾参数和施药方式对作物病虫害防治效果的影响。张京等[15]利用红外热像仪研究了无人驾驶直升机航空喷雾参数对雾滴沉积的影响,提出了针对特定机型的最优作业参数。王玲等[16]利用脉宽调制技术实现了流量和雾滴直径的变量控制,利用风洞测试了不同风速、不同雾滴直径时雾滴沉积效果。蒋焕煜等[17]构建了一套动态PWM变量喷雾实验平台,通过自动控制高速电磁阀开度实现流量控制,利用雾滴覆盖密度的变异系数评估了不同PWM控制信号频率、占空比及不同喷雾压力下单个喷嘴动态雾滴分布均匀度。邓巍等[18-19]开发了基于脉宽调制连续式和非连续式变量喷雾装置,研究了该喷雾装置流量变化对平口扇形喷嘴喷雾特性的影响。
目前,我国航空植保产业尚处于起步阶段,在无人机精准施药控制方面研究不足,缺乏对不同作业参数、不同环境条件下小型无人机施药雾滴覆盖密度、雾滴分布均匀度、雾滴沉积及雾滴飘移规律等方面的研究[20-21]。为此,本文设计地面站控制软件,实现施药系统远程控制、数据监测及存储,通过CAN总线实时采集无人机飞行参数,实现施药流量与飞行速度的自动匹配,为植保无人机变量施药技术的发展提供理论依据和数据参考。
1 无人机动态变量施药系统设计
1.1 系统整体设计
设计的无人机动态变量施药系统如图1所示,主要由气象站、地面站、植保无人机和无线数据传输模块组成,其中植保无人机又包括无人机平台、飞行控制器和施药系统。气象站设置于试验区域,用于检测环境信息;地面站运行独立设计的植保无人机智能施药控制软件;无线数据传输模块分为地面端和机载端,频率915 MHz,最大功率100 mW,最远传输距离500 m;无人机平台采用3CD-15型油动单旋翼无人机,最大载药量15 L,飞行速度0~8 m/s,飞行高度0~5 m;采用一飞智控Finix300型飞行控制器,用于无人机飞行参数采集。
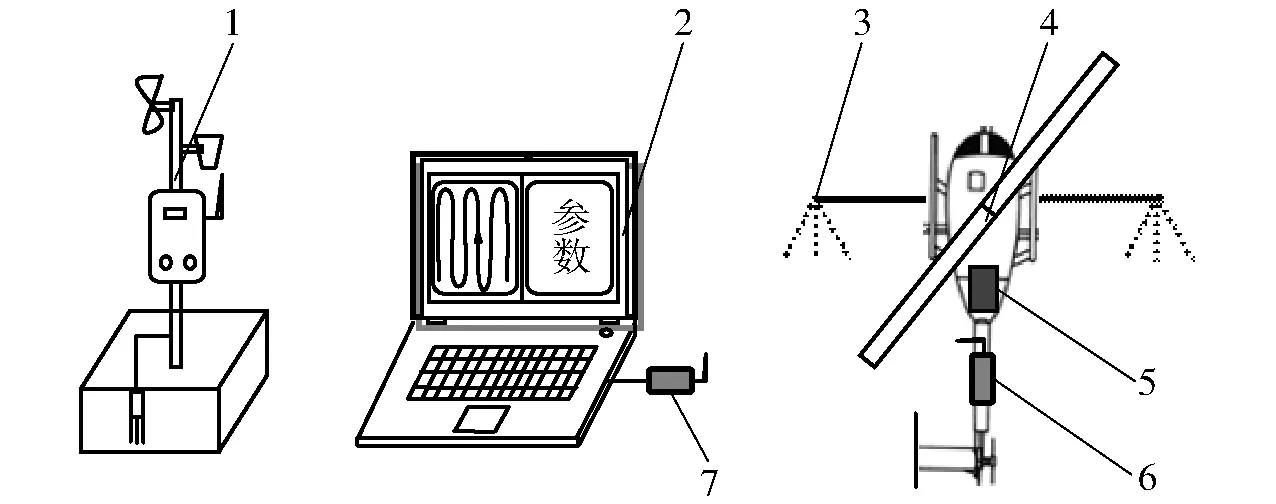
图1 无人机动态变量施药系统Fig.1 Dynamic variable spraying system of UAV1.气象站 2.地面站 3.施药系统 4.无人机平台 5.飞行控制器 6.无线数据传输模块机载端 7.无线数据传输模块地面端
基于LabVIEW设计了植保无人机智能施药控制软件,如图2所示。控制软件通过无线数据传输模块与机载施药控制器进行通信,实现对植保无人机的远程控制和飞行参数(速度、高度和姿态)、施药参数(流量、压力、药液余量、电池电量)等数据可视化呈现及存储。通过控制软件还可实现动态变量喷雾系统工作模式的远程切换。

图2 植保无人机智能施药控制软件界面Fig.2 Intelligent spraying control software interface of plant protection UAV
1.2 施药系统设计
施药系统主要由药箱、微型隔膜泵、压力传感器、流量传感器、电动离心喷头和施药控制器等组成,如图3所示。微型隔膜泵负责将药液由药箱输送至电动离心喷头,电动离心喷头通过高速转动产生的离心力将药液雾化,施药控制器用于控制微型隔膜泵和电动离心喷头转速,压力传感器和流量传感器用于检测系统压力和流量。 6S锂电池为整个施药系统提供电源,采用基于ARM Cortex-M4内核的STM32F407VET6单片机作为施药控制器核心处理器;微型隔膜泵采用PLD-1206,额定电压12 V,最大压力1 MPa,最大流量4 L/min;压力传感器型号KY-3,量程0~1 MPa,精度±0.25%;流量传感器型号MJ-HW41C,量程0.25~2.5 L/min,精度±5%;电动离心喷头型号LXPT-03,额定电压12 V,最高转速16 000 r/min,雾滴直径可小于100 μm,左右电动离心喷头安装间距为135 cm。

图3 施药系统实物图Fig.3 Picture of spraying system1.飞行控制器 2.施药控制器 3.药箱 4.电动离心喷头 5.喷杆 6.水管 7.微型隔膜泵
1.3 施药系统控制原理
施药系统控制原理如图4所示。对施药系统各组件功率消耗进行校核分析后,采用2个独立UBEC (Ultra battery elimination circuit)模块对6S锂电池进行稳压。其中一个UBEC模块稳压输出5 V/4 A和12 V/4 A电源, 5 V/4 A电源为飞行控制器、施药控制器、无线数据传输模块、压力传感器、流量传感器及液位传感器供电,12 V/4 A电源为电动离心喷头供电;另一个UBEC模块稳压输出12 V/4 A电源,为微型隔膜泵供电。施药控制器通过CAN总线与无人机飞行控制器通信,实时采集飞行参数,并通过无线数据传输模块与地面站控制软件通信,获取气象站采集的环境参数。施药控制器输出端为3路相互独立且占空比可调的PWM波,有刷电动机电子调速器根据输入PWM波的占空比对微型隔膜泵和电动离心喷头进行调速,进而实现对施药流量、雾滴直径和有效喷幅的控制。植保无人机施药试验过程中,施药系统工作模式分为遥控控制模式和自动控制模式两种,施药控制器通过无线数据传输模块接收地面站控制指令,进行不同作业模式切换,同时将飞行参数、施药参数等数据发送至地面站控制软件。

图4 施药系统控制原理图Fig.4 Principle diagram of spraying system
1.4 变量施药控制方法
施药作业对象、病虫害类型及所用农药种类确定后,微型隔膜泵施药流量与飞行速度成正比关系。植保无人机在不同飞行速度时所需施药流量计算式为
(1)
式中Q——理论流量,L/minD——农药单位面积使用量,L/hm2W——喷幅,mv——飞行速度,m/s
电子调速器输入的PWM波控制信号周期为20 ms,PWM波占空比有效调节范围为5%~9%,此时电子调速器对应输出0~12 V线性变化电压。植保无人机施药系统硬件搭建完成后,需要用流量传感器对不同PWM波占空比时微型隔膜泵的施药流量进行标定。以PWM波5%占空比为起点,步长为0.1%,检测总计40个样本对应的施药流量,得出施药流量与PWM波占空比的关系曲线,如图5所示,随后用4次多项式对图中曲线进行拟合,得到施药流量与PWM波占空比之间的关系表达式为
PDuty_Ratio=(-0.213 9Q4+1.436 1Q3-2.670 1Q2+3.284 5Q+4.787 7)×100%(R2=0.999 7)
(2)
式中PDuty_Ratio——PWM波占空比,%

图5 微型隔膜泵流量标定曲线Fig.5 Flow calibration curve of micro diaphragm pump
施药控制器通过无线数据传输模块获取地面站控制指令,判断施药系统工作模式。当施药系统工作在遥控控制模式时,微型隔膜泵PWM占空比由地面站远程控制;施药系统工作在自动控制模式时,PWM占空比由施药控制器自动控制,此时施药控制器通过CAN总线获取飞行控制器采集的无人机实时飞行速度v,并对飞行速度v进行判断,当飞行速度v为0.8~5.8 m/s时,代入式(1)计算出当前飞行速度所需要施药流量Q,随后将施药流量Q代入式(2)中,计算满足当前施药流量所需PWM波占空比,最终实现微型隔膜泵施药流量与当前飞行速度的匹配;当药液余量及电池电压低于设定临界值时,微型隔膜泵和电动离心喷头停止工作,施药控制器向无人机飞控系统发送返航指令。控制流程如图6所示。
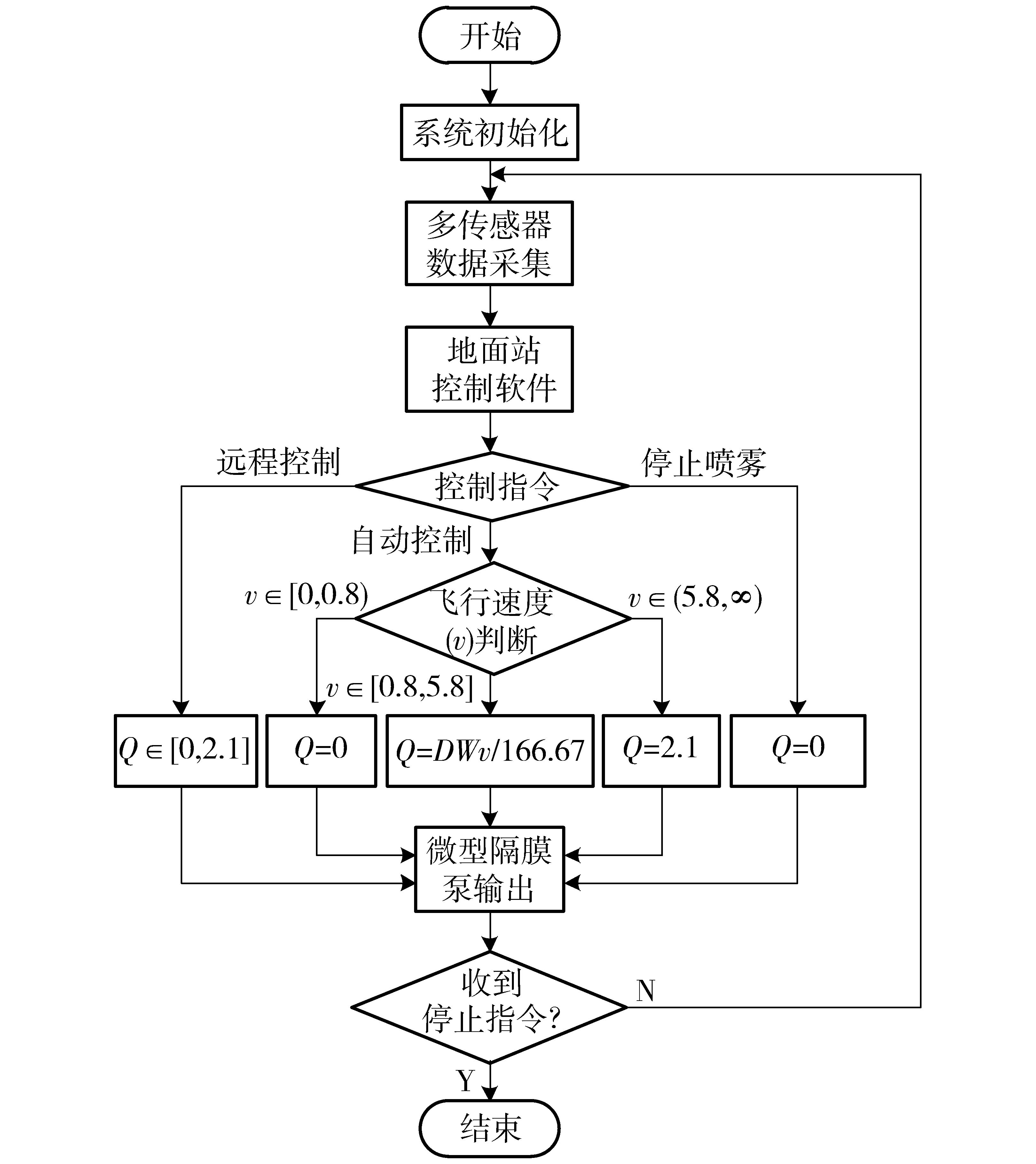
图6 控制流程图Fig.6 Flow chart of control program
2 试验
2.1 试验方案
选取长50 m、宽10 m的场地作为试验区域,周围设置宽10 m隔离带,保证试验安全。配置浓度为0.1%的Rhodamine-B(荧光染色剂)水溶液代替农药进行喷雾测试。采用26 mm ×76 mm的水敏试纸检测雾滴覆盖密度及分布均匀度,采用11 cm×10 cm的聚酯薄膜收集雾滴沉积量。试验方案如图7所示,沿X轴正向间隔0.5 m均匀布置21个采样点,在每个采样点距离地面0.5 m高处分别固定一片水敏试纸和聚脂薄膜。在雾滴采样点前方均匀布置4个间隔1 m的风速仪,用于检测每次试验时植保无人机下旋气流最大风速,风速仪距离地面0.5 m水平安装。试验过程中,植保无人机飞行前向为Y轴正向且与采样点中心线重合,保持喷头距离地面目标高度为2 m,环境风向沿X轴反向。每次试验后收集各个采样点水敏试纸和聚酯薄膜,分别标记并封存,以便后续检测分析。

图7 试验方案示意图Fig.7 Schematic diagram of test scheme
试验在无锡汉和航空技术有限公司飞行测试场进行,如图8所示。环境平均温度25℃,平均相对湿度55%,风速小于1.5 m/s。试验过程中,设定农药用量12 L/hm2,有效喷幅5 m,电动离心喷头工作电压为额定电压12 V。测试目标飞行高度为2 m,目标飞行速度分别为1.0、2.0、3.0、4.0、5.0 m/s时的雾滴覆盖密度以及分布均匀度和沉积量,并通过上述参数评价动态变量施药系统的稳定性及控制方法的可靠性。由于受环境变化及人为操作误差影响,无人机飞行高度和飞行速度暂时无法精准保证,试验中进行多次试验,并观察试验数据,当实测飞行高度和飞行速度数据与目标飞行高度和飞行速度之间的误差不超过±0.2 m和±10%时视为有效试验。

图8 试验现场图Fig.8 Picture of test field
2.2 试验数据处理方法
雾滴覆盖密度通过图像处理技术对每个采样点的水敏试纸进行分析得到。雾滴分布均匀度用雾滴覆盖密度的变异系数表示,并由各个采样点的雾滴覆盖密度计算得出,变异系数愈小,雾滴分布愈均匀,其计算方法为
(3)
其中
式中C——变异系数,%S——雾滴覆盖密度标准差X——雾滴平均覆盖密度,个/cm2
用80 mL蒸馏水对聚脂薄膜进行洗脱,取3~4 mL样本溶液放入比色皿中,使用Cary Elipse荧光光度分光计(美国瓦里安中国有限公司)测定样本溶液荧光强度,通过标准曲线可得样本溶液荧光剂浓度,推算出试验区域内每平方厘米雾滴沉积量为
(4)
式中βdep——雾滴沉积量,μg/cm2ρsampl——样本溶液荧光计读数ρblk——蒸馏水荧光计读数Fcal——校准系数,μg/LVdil——用于洗脱采集样本的溶液体积,L
ρspray——喷雾液浓度,%
Acol——收集器投影面积,cm2
3 结果分析
3.1 施药流量偏差分析
利用式(1)计算不同速度下理论流量作为衡量标准,通过流量传感器检测不同飞行速度时微型隔膜泵实际流量,计算实际流量与理论流量之间的偏差,试验部分数据见表1。试验结果显示,当飞行速度低于0.8 m/s时,PWM波占空比较小,电子调速器输出电压不足以克服微型隔膜泵电动机内阻及管路损耗,无法输出流量;当飞行速度高于5.8 m/s时,微型隔膜泵输出流量达到峰值,无法根据飞行速度增大而进一步加大输出流量;飞行速度为0.8~5.8 m/s时,动态变量施药系统能根据飞行速度有效控制微型隔膜泵实际流量,实际流量与理论流量之间的平均偏差为1.9%。
3.2 雾滴覆盖密度及分布均匀度分析
分析目标飞行高度为2 m,目标飞行速度为1.0、2.0、3.0、4.0、5.0 m/s时各个采样点水敏试纸每平方厘米雾滴个数,由式(3)计算可得动态变量施药系统实际施药试验时雾滴覆盖密度及分布均匀度,试验数据见表2。当水敏试纸雾滴覆盖密度小于5个/cm2时,视为无效采样点,由表2数据可知,有效采样点样本编号区间为6~16,有效喷幅为5 m,且不同飞行速度下,平均雾滴覆盖密度分别为93、80、43、41、18个/cm2,变异系数分别为128%、121%、81%、75%、34%,因此,飞行速度越高,雾滴覆盖密度、变异系数越小。民航标准MH/T 1002—1995《农业航空作业质量技术指标》要求超低容量农药喷洒时雾滴覆盖密度为15~40个/cm2,雾滴分布均匀度小于等于70%。结合试验数据可知,3CD-15型植保无人机优选作业速度为3.91~5.10 m/s。
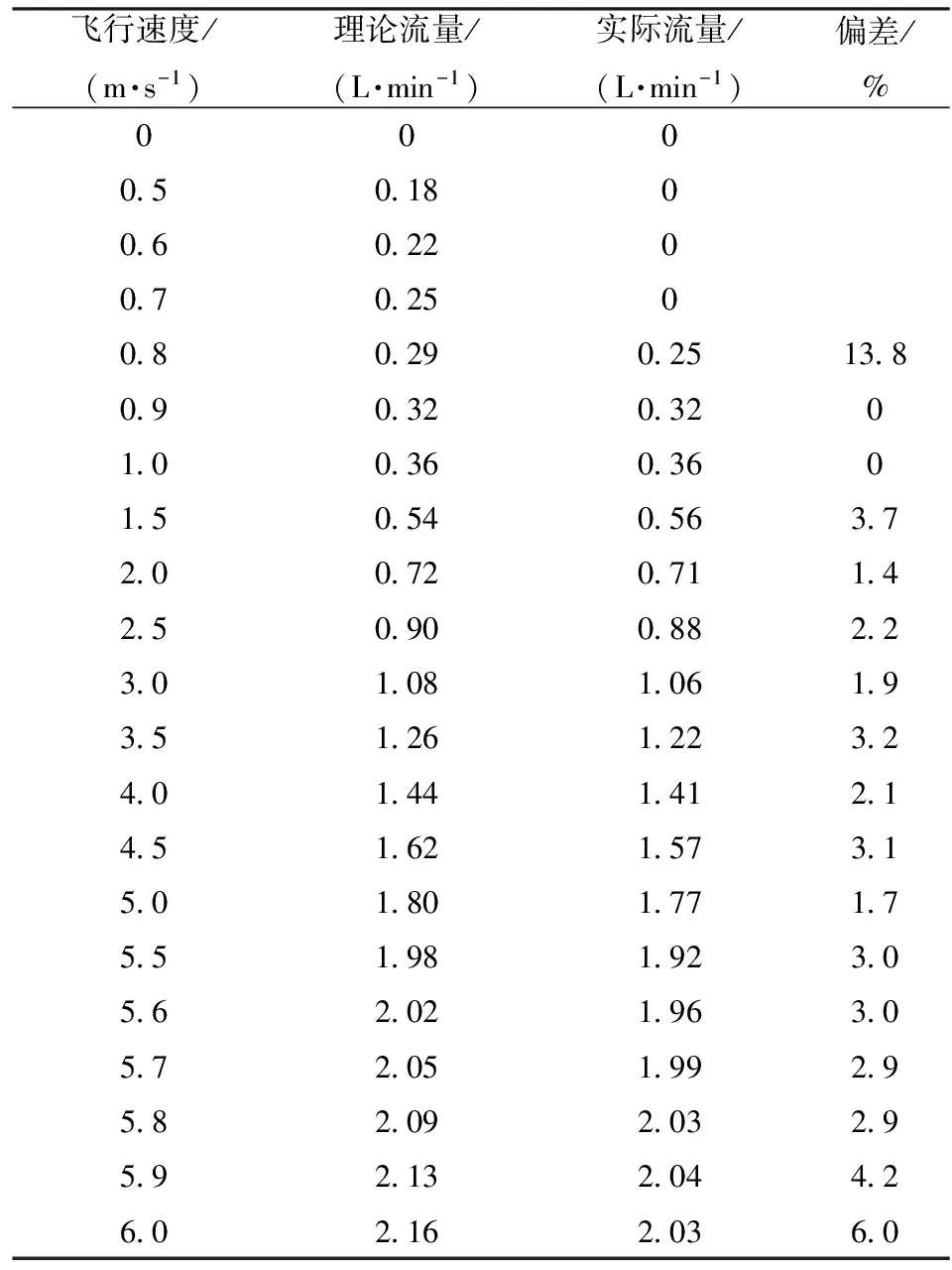
表1 施药流量偏差统计Tab.1 Deviation statistics of flow
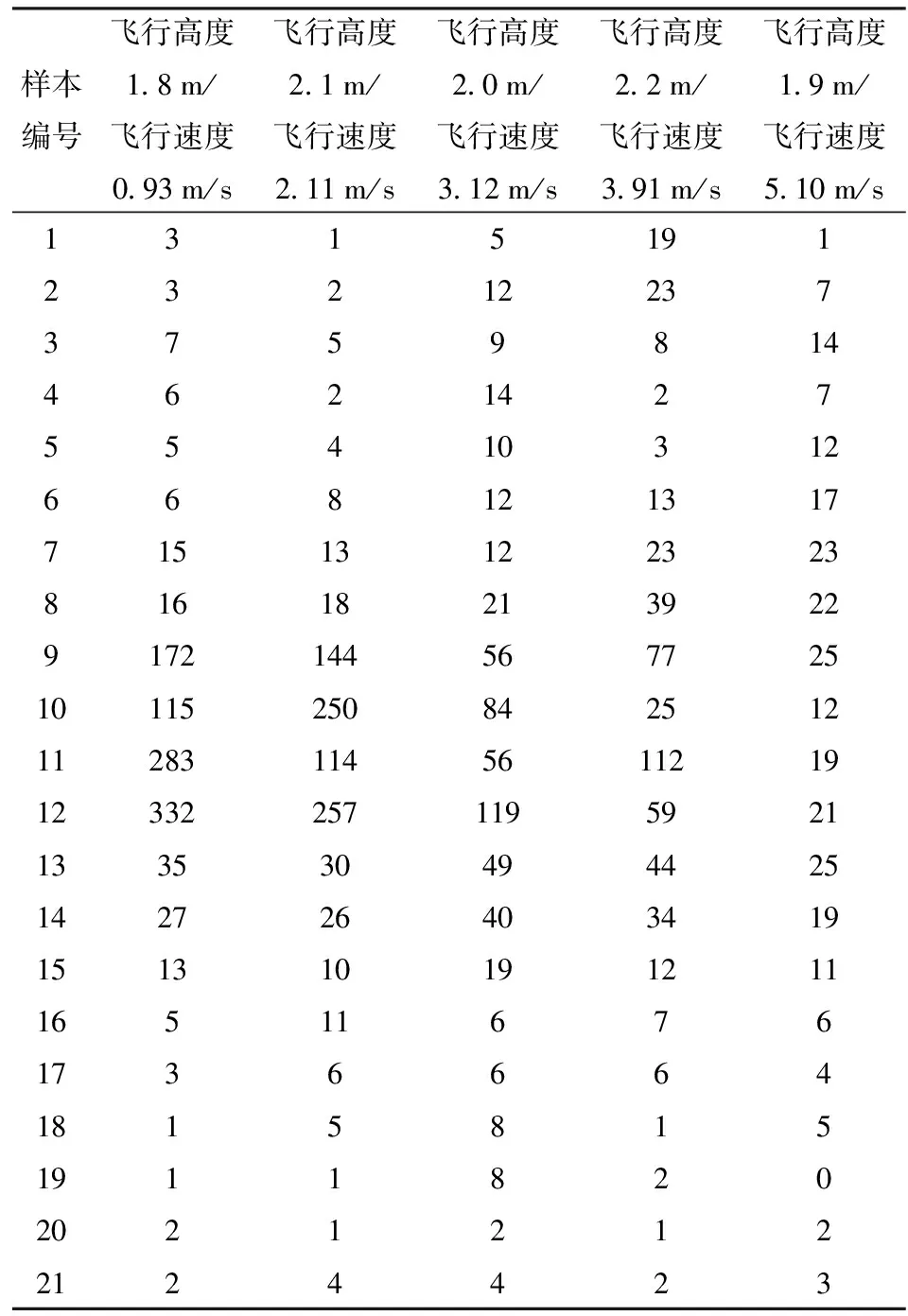
表2 雾滴覆盖密度统计Tab.2 Statistics of droplet coverage density 个/cm2
3.3 雾滴沉积量分析
由式(4)计算目标飞行高度为2 m,目标飞行速度分别为1.0、2.0、3.0、4.0、5.0 m/s时各个采样点聚脂薄膜每平方厘米雾滴沉积量,分析动态变量施药系统实际施药试验时雾滴沉积效果,试验数据见表3。试验中设定药液用量12 L/hm2,试验区域内雾滴沉积量理想值为120 μg/cm2,但实际试验时,雾滴存在飘移和蒸发现象,因此实际雾滴沉积量应小于理想值。由表3中数据分析可知,不同飞行速度下,雾滴沉积量在采样点编号8~12处达到峰值,且当飞行速度低于3.91 m/s时,雾滴沉积量峰值均高于理想值。有效样本编号6~16区间内,不同飞行速度时雾滴沉积量平均值分别为90.0、73.0、56.8、52.4、42.1 μg/cm2,飞行速度越高,雾滴沉积量越小,雾滴飘移及蒸发现象越严重。
表3 雾滴沉积量统计
Tab.3 Statistics of droplet deposition μg/cm2

3.4 风场测试数据分析
由表1和表2试验数据分析发现,不同飞行速度下,雾滴覆盖密度和雾滴沉积量均在采样点中心线附近达到峰值,且明显高于两侧。分析原因如下:电动离心喷头安装间距偏小,左、右电动离心喷头喷幅重合度偏大;中心线附近采样点靠近植保无人机正下方,受下旋气流影响显著。试验过程中风场测试数据见表4,不同飞行速度时B、C两点下旋气流最大风速明显高于A、D两点,且飞行速度越高,下旋气流最大风速越小。另外,由表1和表2数据分析可知,采样点中心线左侧雾滴覆盖密度和雾滴沉积量高于采样点右侧,分析原因是雾滴受X轴反向环境风影响而产生飘移。

表4 风场测试数据Tab.4 Wind speed of test field m/s
3.5 无人机变量施药系统施药效果分析
由表1数据可知,动态变量控制效果较好,实测流量与理论流量的平均误差为1.9%,能够实现施药流量与飞行速度的精准匹配,即飞行速度慢,施药流量小;飞行速度快,施药流量大。结合表2和表3数据,实际的雾滴覆盖密度和雾滴沉积量并不符合预期,即未能实现随飞行速度变化而雾滴覆盖密度和雾滴沉积量保持相对稳定,分析原因如下:
(1)无人直升机飞行速度变化对下旋气流风场分布影响显著,其在表4中有直观体现。此现象与直升机飞行原理有关,当直升机以一定速度向前飞行时,直升机主旋翼需要一定的俯仰角,且随着飞行速度的增加,俯仰角增大。下旋气流最大风速及空间分布对雾滴沉积和飘移影响显著,随着飞行速度的增加,下旋气流最大风速减小,方向发生改变,雾滴飘移加剧,因此造成施药流量虽然与飞行速度相匹配,但雾滴覆盖密度及沉积量具有减小趋势。分析表2、3数据可知,随着飞行速度的增加,雾滴覆盖密度由93个/cm2降至18个/cm2,雾滴沉积量由90.0 μg/cm2降至42.1 μg/cm2。
(2)随着无人直升机飞行速度增大,施药流量相应增加,电动离心喷头负载增大,转速下降,离心力降低,难以将所有的雾滴进行有效雾化,造成雾滴直径增大,雾滴覆盖密度减小。通过观察水敏试纸上雾滴附着痕迹可知,飞行速度为0.93 m/s时,雾滴覆盖密度较大,雾滴尺寸较小;飞行速度为5.10 m/s时,雾滴覆盖密度较小,雾滴尺寸较大。
(3)由于试验中飞行速度和飞行高度暂时难以精准控制,且试验环境不能保证完全一致,因此试验数据存在误差。
4 结论
(1)设计了基于ARM架构单片机的变量施药控制系统和基于脉宽调制技术的施药流量控制方法,通过CAN总线技术实时采集无人机飞行参数,实现了施药流量与飞行速度的自动匹配,并对植保无人机变量施药系统工作性能及施药效果进行了测试,试验结果表明变量施药系统实际流量与理论流量之间平均偏差为1.9%,控制精度满足试验预期,系统稳定可靠。
(2)基于LabVIEW设计了植保无人机变量施药控制软件,通过无线数据传输模块与施药系统无线双向通信,实现了无人机变量施药系统远程控制、作业参数实时监测及数据存储。
(3)根据试验数据分析可知,随着飞行速度的增加,雾滴覆盖密度和雾滴沉积量减小,并未能保持相对均匀一致。单纯采用脉宽调制技术实现施药流量与飞行速度动态匹配可明显改善施药效果,但不能完全解决由于飞行速度变化导致的施药不均匀现象,因此还需对环境风速、风向、下旋气流等影响因素作进一步研究。
1 薛新宇,梁建,傅锡敏.我国航空植保技术的发展前景[J].中国农机化,2008(5):27-28. XUE Xinyu, LIANG Jian, FU Ximin. Prospect of aviation plant protection in China[J]. Chinese Agricultural Mechanization,2008(5):27-28. (in Chinese)
2 廖娟,臧英,周志艳,等.作物航空喷施作业质量评价及参数优选方法[J/OL].农业工程学报,2015,31(增刊2):38-46. http:∥www.tcsae.org/nygcxb/ch/reader/view_abstract.aspx?file_no=2015Z206&flag=1.DOI:10.11975/j.issn.1002-6819.2015.z2.006. LIAO Juan, ZANG Ying, ZHOU Zhiyan, et al. Quality evaluation method and optimization of operating parameters in crop aerial spraying technology[J/OL]. Transactions of the CSAE,2015,31(Supp.2):38-46. (in Chinese)
3 FRITZ B K, BRADLEY K, HOFFMANN W C, et al. Aerial application methods for increasing spray deposition on wheat heads[J]. Applied Engineering in Agriculture, 2007,23(6):709-715.
4 FRITZ B K, BRADLEY K. Meteorological effects on deposition and drift of aerially applied sprays[J]. Transactions of the ASABE,2006,49(5):1295-1301.
5 BOUSE L F. Effect of nozzle type and operation on spray droplet size[J]. Transactions of the ASAE, 1994,37(5):1389-1400.
6 HUANG Y, HOFFMANN W C, WESLEY C, et al. Development of a spray system for an unmanned aerial vehicle platform[J]. Applied Engineering in Agriculture, 2009,25(6):803-809.
7 KIRK I W. Measurement and prediction of atomization parameters from fixed-wing aircraft spray nozzles[J]. Transactions of the ASABE, 2007, 50(3): 693-703.
8 胡炼,周志艳,罗锡文,等.无人直升机风场无线传感器网络测量系统设计与试验[J/OL].农业机械学报,2014,45(5):221-226. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20140534&flag=1. DOI:10.6041/j.issn.1000-1298.2014.05.034. HU Lian, ZHOU Zhiyan, LUO Xiwen, et al. Development and experiment of a wireless wind speed sensor network measurement system for unmanned helicopter [J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(5): 221-226. (in Chinese)
9 汪沛,胡炼,周志艳,等.无人油动力直升机用于水稻制种辅助授粉的田间风场测量[J].农业工程学报,2013,29(3):54-61. WANG Pei, HU Lian, ZHOU Zhiyan, et al. Wind field measurement for supplementary pollination in hybrid rice breeding using unmanned gasoline engine single-rotor helicopter[J]. Transactions of the CSAE, 2013, 29(3): 54-61. (in Chinese)
10 李继宇,周志艳,兰玉彬,等.旋翼式无人机授粉作业冠层风场分布规律[J/OL].农业工程学报,2015,31(3):77-86. http:∥www.tcsae.org/nygcxb/ch/reader/view_abstract.aspx?file_no=20150311&flag=1. DOI:10.3969/j.issn.1002-6819.2015.03.011. LI Jiyu, ZHOU Zhiyan, LAN Yubin, et al. Distribution of canopy wind field produced by rotor unmanned aerial vehicle pollination operation[J/OL]. Transactions of the CSAE, 2015, 31(3): 77-86. (in Chinese)
11 王昌陵,何雄奎,王潇楠,等.无人植保机施药雾滴空间质量平衡测试方法[J/OL].农业工程学报,2016,32(11): 54-61. http:∥www.tcsae.org/nygcxb/ch/reader/view_abstract.aspx?file_no=20161108&flag=1. DOI:10.11975/j.issn.1002-6819.2016.11.008. WANG Cangling, HE Xiongkui, WANG Xiaonan, et al. Testing method of spatial pesticide spraying deposition quality balance for unmanned aerial vehicle[J/OL]. Transactions of the CSAE, 2016, 32(11): 54-61. (in Chinese)
12 薛新宇,秦维彩,孙竹,等.N-3型无人直升机施药方式对稻飞虱和稻纵卷叶螟防治效果的影响[J].植物保护学报,2013,40(3):273-278. XUE Xinyu, QIN Weicai, SUN Zhu, et al. Effects of N-3 UAV spraying methods on the efficiency of insecticides against planthoppers and Cnaphalocrocis medinalis[J]. Journal of Plant Protection, 2013,40(3):273-278. (in Chinese)
13 张宋超,薛新宇,秦维彩,等.N-3型农用无人直升机航空施药飘移模拟与试验[J/OL].农业工程学报,2015,31(3):87-93. http:∥www.tcsae.org/nygcxb/ch/reader/view_abstract.aspx?file_no=20150312&flag=1.DOI:10.3969/j.issn.1002-6819.2015.03.012. ZHANG Songchao, XUE Xinyu, QIN Weicai, et al. Simulation and experimental verification of aerial spraying drift on N-3 unmanned spraying helicopter[J/OL]. Transactions of the CSAE,2015,31(3): 87-93. (in Chinese)
14 秦维彩,薛新宇,周立新,等.无人直升机喷雾参数对玉米冠层雾滴沉积分布的影响[J/OL].农业工程学报,2014, 30(5):50-56. http:∥www.tcsae.org/nygcxb/ch/reader/view_abstract.aspx?file_no=20140507&flag=1.DOI: 10.3969/j.issn.1002-6819.2014.05.007. QIN Weicai, XUE Xinyu, ZHOU Lixin, et al. Effects of spraying parameters of unmanned aerial vehicle on droplets deposition distribution of maize canopies[J/OL]. Transactions of the CSAE,2014, 30(5):50-56. (in Chinese)
15 张京,何雄奎,宋坚利,等.无人驾驶直升机航空喷雾参数对雾滴沉积的影响[J/OL].农业机械学报,2012,43(12):94-96. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20121217&flag=1.DOI: 10.6041/j.issn.1000-1298.2012.12.017. ZHANG Jing, HE Xiongkui, SONG Jianli, et al. Influence of spraying parameters of unmanned aircraft on droplets deposition[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2012,43(12):94-96. (in Chinese)
16 王玲,兰玉彬,HOFFMANN W C,等.微型无人机低空变量喷药系统设计与雾滴沉积规律[J/OL].农业机械学报, 2016,47(1):15-22. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20160103&flag=1.DOI: 10.6041/j.issn.1000-1298.2016.01.003. WANG Ling, LAN Yubin, HOFFMANN W C, et al. Design of variable spraying system and influencing factors on droplets deposition of small UAV[J/OL]. Transactions of the Chinese Society for Agricultural Machinery,2016,47(1):15-22. (in Chinese)
17 蒋焕煜,周鸣川,李华融,等. PWM变量喷雾系统动态雾滴分布均匀性实验[J/OL].农业机械学报,2015,46(3): 73-77. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20150310&flag=1.DOI: 10.6041/j.issn.1000-1298.2015.03.010. JIANG Huanyu, ZHOU Mingchuan, LI Huarong, et al. Experiment on dynamic droplet distribution uniformity for PWM variable spray system[J/OL]. Transactions of the Chinese Society for Agricultural Machinery,2015,46(3):73-77. (in Chinese)
18 邓巍,丁为民,何雄奎.PWM间歇式变量喷雾的雾化特性[J].农业机械学报,2009,40(1):74-78. DENG Wei,DING Weimin,HE Xiongkui. Spray characteristics of PWM-based intermittent pulse variable spray[J]. Transactions of the Chinese Society for Agricultural Machinery,2009,40(1):74-78.(in Chinese)
19 邓巍,丁为民.基于PWM技术的连续式变量喷雾装置设计与特性分析[J].农业机械学报,2008,39(6):77-80. DENG Wei, DING Weimin. Variable-rate continuous spray equipment based on PWM technology and its spray characteristics[J]. Transactions of the Chinese Society for Agricultural Machinery,2008,39(6):77-80. (in Chinese)
20 张东彦,兰玉彬,陈立平,等.中国农业航空施药技术研究进展与展望[J/OL].农业机械学报,2014,45(10):53-59. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20141009&flag=1.DOI:10.6041/j.issn.1000-1298.2014.10.009. ZHANG Dongyan, LAN Yubin, CHEN Liping, et al. Current status and future trends of agricultural aerial spraying technology in China[J/OL]. Transactions of the Chinese Society for Agricultural Machinery,2014,45(10):53-59. (in Chinese)
21 周志艳,臧英,罗锡文,等.中国农业航空植保产业技术创新发展战略[J/OL].农业工程学报,2013,29(24):1-10. http:∥www.tcsae.org/nygcxb/ch/reader/view_abstract.aspx?file_no=20132401&flag=1.DOI:10.3969/j.issn.1002-6819.2013.24.001. ZHOU Zhiyan, ZANG Ying, LUO Xiwen, et al. Technology innovation development strategy on agricultural aviation industry for plant protection in China[J/OL]. Transactions of the CSAE,2013,29(24):1-10. (in Chinese)
Design and Test of Dynamic Variable Spraying System of Plant Protection UAV
WANG Dashuai ZHANG Junxiong LI Wei XIONG Bin ZHANG Shunlu ZHANG Wenqiang
(CollegeofEngineering,ChinaAgriculturalUniversity,Beijing100083,China)
In order to improve the droplet distribution uniformity and avoid repeating and missing spraying, a spraying flow control method based on pulse width modulation (PWM) was designed, and based on the MCU of STM32F407VET6, a dynamic variable spraying system fused with multi-sensor was developed. Spraying system was controlled remotely and spraying parameters were detected and saved by ground measurement and control software which was developed by LabVIEW. The tests based on reality field environment were carried out under the condition of different flying speeds to test actual operation performance and spraying effect of dynamic variable spraying system of plant protection UAV. Operation performance was reflected by deviation between practical and theoretical flows. Practical flow of micro diaphragm pump was detected by a flow sensor and theoretical flow was calculated by a derivation formula. Spraying effect was characterized by droplet deposition, which was collected by water sensitive papers and polyester films at targeted flying speed of 1.0 m/s, 2.0 m/s, 3.0 m/s, 4.0 m/s and 5.0 m/s. Rhodamine-B water solution with concentration of 0.1% was used as a substitute for pesticides in the tests. Concentration of Rhodamine-B was measured by fluorescence intensity protractor, droplet coverage density and distribution uniformity were identified through image processing. The results showed that when flying speed was changed from 0.8 m/s to 5.8 m/s, spraying flow was able to match the speed accurately based on the spraying system and control method, and average deviation between practical and theoretical flows was 1.9%. The optimum flying speed of spraying operation based on 3CD-15 plant protection UAV was 3.91~5.10 m/s, during the variation range of speed, the effective sprinkling width was 5 m, droplet coverage density was 18~41 per square centimeter, coefficient of variation was 34%~75%, droplet deposition was 42.1~52.4 μg/cm2. The research result provided method for optimization of flying speed and also theoretical support to improve the quality of aviation operations.
UAV; variable spraying; flying speed; pulse width modulation; flow
2016-08-29
2016-09-20
“十二五”国家科技支撑计划项目(2015BAD23B02)、国家自然科学基金项目(31301232)、国家高技术研究发展计划(863计划)项目(2012AA041507)和高等学校博士学科点专项科研基金项目(20130008120020)
王大帅(1990—),男,博士生,主要从事农业机器人及植保无人机精准施药研究,E-mail: wdshc@cau.edu.cn
张俊雄(1979—),男,副教授,博士,主要从事计算机视觉技术及农业机器人研究,E-mail: cau2007@cau.edu.cn
10.6041/j.issn.1000-1298.2017.05.010
S252+.3
A
1000-1298(2017)05-0086-08
