基于结构降耦的一类低耦合度新型3T1R并联机构的拓扑设计
2017-06-05沈惠平强恒存曾氢菲孟庆梅杨廷力
沈惠平 强恒存 曾氢菲 孟庆梅 杨廷力
常州大学现代机构学研究中心,常州,213016
基于结构降耦的一类低耦合度新型3T1R并联机构的拓扑设计
沈惠平 强恒存 曾氢菲 孟庆梅 杨廷力
常州大学现代机构学研究中心,常州,213016
四自由度的可实现SCARA型(三平移一转动)输出运动的并联机构,与三自由度的Delta机构相比,因其本身的拓扑结构复杂,导致运动学正解以及动力学计算复杂,从而使其新机型的研究和开发应用相对困难;而降低这些机构的耦合度(简称结构降耦)可直接降低机构运动学、动力学求解的难度。根据笔者提出的机构结构降耦方法,对笔者最近提出的一类5个耦合度值κ为2且具有较好实用价值的SCARA型新型并联机构进行了结构降耦优化,得到了耦合度较低(降为κ=1)但自由度和动平台输出运动类型均保持不变的10个SCARA新机型,而这10个低耦合度(κ=1)机构的运动学正解及动力学正反解,可用一维搜索法方便求得数值解,或从易导出的1个一元高次代数方程求得封闭解,为其进一步构型拓扑优化、设计及应用研究奠定了基础。
结构降耦;拓扑结构优化;方位特征;运动学正解;耦合度
0 引言
SCARA(selective compliance assembly robot arm)串联机械手由日本山梨大学牧野洋教授于1978年发明,它包括X、Y、Z方向的平动自由度和绕Z轴的转动自由度(三平移一转动,3T1R),由于其Z轴具有良好的刚度,故特别适合装配工作,已广泛地用于电子产品、汽车、药品及食品等领域[1]。ABB 公司于1999年开发出了基于三平移Delta(1985,Clavel)并联机构(parallel mechanism, PM)的SCARA并联操作手FlexPicker[2-3],并得到广泛应用;Pierrot及其团队相继发明了H4(1999年)、I4(2003年)、Par4系列(2005年)四自由度SCARA并联操作手,并得到了较好的工业应用[4-6]。
国内对SCARA型并联机构也进行了研究:赵铁石等[7]提出了一种4-URU型三平移一转动并联机器人;金琼等[8]基于单开链理论提出了一类三平移一转动并联机器人,并于2003年申请了一组5个具有单动平台的三平移一转动并联机构[9],但均未研制样机;黄田等[10]开发了具有2个或者3个动平台的四自由度三平移一转动的Cross-IV型高速搬运机器人,并实现了产业化;刘辛军等[11]在国内首次研发出具有1个动平台的X4型并联机器人样机。由此可见,相对于三平移Delta操作手研究和应用相对成熟,新型三平移一转动并联机构的研究和应用亟待加强。
另一方面,机构位置正解的求解是并联机构研究中最基础的重要内容之一,它直接关乎机构的误差分析、奇异性分析及动力学分析的难易,而这些又与机构耦合度κ的大小有关[12]。耦合度反映了机构各独立回路运动学、动力学参数之间的关联、依赖程度,κ值大小反映了机构运动学、动力学问题求解的复杂性,κ值越大,复杂度越高。但对于如何降低耦合度κ,目前研究得较少。
文献[13-14]从并联机构支链本身的拓扑结构以及支链在动静平台之间的拓扑布置两方面,提出了并联机构的3种降耦设计方法及其相应的例子,并将机构的拓扑结构降耦作为机构拓扑结构优化的主要内容和手段之一。
杨廷力等[15]提出了一类具有较好应用前景的13个四自由度的SCARA型(三平移一转动)并联机构,其中10种为新机构,它们能实现三平移和绕动平台法线的一个转动输出,但这些机构的耦合度均较高(κ=2[15]),这是由其本身复杂的拓扑结构引起的,也意味着其运动学正解以及动力学计算比较复杂。因此,降低这些机构的耦合度(简称结构降耦),对这类新型3T1R并联机构的设计与应用具有重要意义。
本文根据笔者提出的机构结构降耦方法[13-14],对文献[15]中5种单平台的新型并联机构进行结构降耦,分别得到了动平台具有3个、2个受力点的降耦机构各5个,它们保持了机构的基本功能——自由度和动平台输出运动不变,但耦合度均从κ=2降低为κ=1,从而使得这10个低耦合度机构的运动学正解及动力学正反解可用一维搜索法方便求得数值解,或从易导出的1个一元高次代数方程求得实数解。
1 耦合度及结构降耦方法
1.1 耦合度
以下给出单开链的约束度、机构耦合度κ的定义及其计算式,以及自由度F的计算公式[16]。
1.1.1 单开链的约束度
基本运动链(basic kinematic chain,BKC)中的第j个单开链(single-open-chain,SOC)的约束度定义为
(1)
式中,mj为第j个单开链的运动副数;fi为第i个运动副的自由度;Ij为第j个单开链的驱动副数;ξLj为第j个独立回路的独立位移方程数。

1.1.2 基本运动链的耦合度
基本运动链的耦合度定义为
(2)
并且,对于一个基本运动链,须有
式中,ν为独立回路数。
min{•}指一个基本运动链分解为ν个单开链SOC(Δj)时,可有多种分解方案,应取∑|Δj|最小的单开链分解方案;而机构耦合度κ值为所含基本运动链中的最大耦合度。
1.1.3 机构自由度公式[16]
机构自由度公式为
(3)
式中,F为机构自由度;Mbj为第j条支路末端构件的方位特征(position and orientation characteristics, POC)集;dim{·}为POC集的维数。
1.2 结构降耦原理及其方法
由上文可知,机构的结构降耦设计(coupling-reducing design,CRD)就是降低机构的耦合度。由式(1)、式(2)知,BKC耦合度κ值的大小取决于基本回路的约束度(Δj)值大小,因此,降低机构单开链回路的约束度(Δj)值即可降低机构的耦合度κ值[13]。
文献[13]介绍了基于设计混合支链的、基于运动副复合的、基于方位特征支链主动化的3种结构降耦设计方法。由于本文分析的5个新型SCARA机构[15](表1中A列类型Ⅲ~Ⅶ)均由转动副和球副构成,因此,运动副复合法就是合并动平台上的转动副、球副(或减少动平台的边数),以使式(1)中的自由度数fi减少,从而使Δj减小,进而减小κ,达到这5个SCARA机构结构降耦的目的。

表1 新型3T1R并联机构及其降耦设计后的拓扑结构
2 一类3T1R并联机构的拓扑降耦设计
2.1 Ⅲ型3T1R机构的降耦设计和分析
2.1.1 Ⅲ型3T1R并联机构
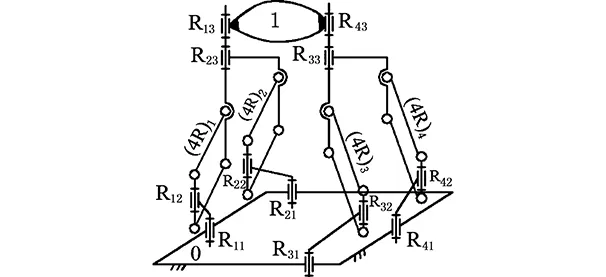
Ⅲ型3T1R并联机构如图1所示[15-17],由动平台1、静平台0以及4条结构相同的复杂支链组成,即动平台1上有4个受力点;每条支链都含有一个平面4R平行四边形机构,表示为Ri1∥Ri2(-◇(4R)i-)∥Ri3(i=1,2,3,4)(其中,◇表示由4R组成的平行四边形)。动平台1上的4个转动副R13、R23、R33、R43的轴线与动平台的法线相互平行,也与静平台0上的4个转动副R11、R21、R31、R41的轴线相互平行。

图1 Ⅲ型3T1R并联机构Fig.1 Ⅲ type 3T1R PM
易知,当转动副R11、R21、R31、R41为驱动副时,动平台1可实现三平移和绕动平台法线的转动输出(取动平台1任意一点O作为基点);同时,该机构由1个基本运动链组成,且耦合度κ=2[15],因此,其运动学正解及动力学正反解求解十分复杂(本文其余4个机构相同,不再赘述)。
2.1.2 Ⅲ型 3T1R并联机构的降耦设计
将图1所示机构动平台1上的转动副R13、R23的轴线重合,则成为图2a所示的降耦机构[18](称为一次降耦),此时,动平台1上有3个受力点。现计算其耦合度。
(1)取第1条单开链回路:
SOC1{-R11∥R12(-◇4R1-)∥R23∥
(-◇4R2-)R22∥R21-}
其独立位移方程数
其中,t3表示三维移动;r1(∥R11)表示绕R11轴线有1个转动。
则其约束度
同理,可求得ξL2=ξL3=4。
(2)第2条单开链及其约束度分别为
SOC2{-R31∥R32(-◇(4R3)-)∥R33-R13}
(3)第3条单开链及其约束度分别为
SOC3{-R41∥R42(-◇(4R4)-)∥R43}
由式(2)、式(3),降耦机构的耦合度、自由度分别为
F=16-4-4-4=4
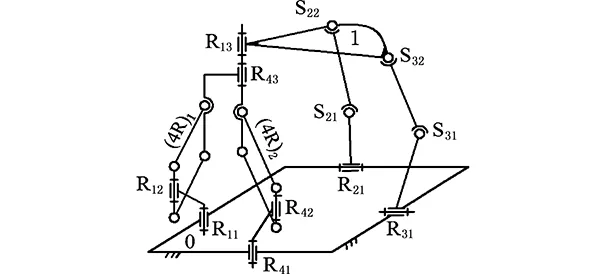
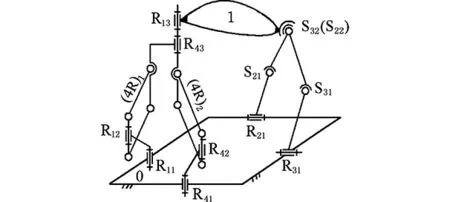
进一步,将图2a机构动平台1上的另外2个运动副R33、R43轴线复合(称为二次降耦),得到动平台仅有2个受力点的新机型[19],如图2b所示;分析其耦合度时,3个单开链回路选择与前述情况相同,因此,其约束度值Δj(j=1,2,3)也相同,二次降耦后的机构耦合度也是κ=1(为节省篇幅,以下4个机构二次降耦后的耦合度分析类似,不再赘述)。

(a)一次降耦设计
(b)二次降耦设计图2 Ⅲ型3T1R并联机构的降耦设计Fig.2 Coupling-reducing design(CRD) for Ⅲ type 3T1R PM
至此,代表机构基本功能的2个最主要拓扑特征——自由度F(仍为4)和方位特征(仍为3T1R)都不变,但2个降耦机构的运动学正解、动力学分析的难度大大降低了,其不同点在于动平台分别为3个和2个受力点,这可能会影响动平台1的工作灵活性及其工作空间大小,具体情况有待进一步分析。
2.2 Ⅳ型3T1R机构的降耦设计和分析
2.2.1 Ⅳ型3T1R并联机构
同样地,将图1机构中的任两条复杂支链用简单无约束支链R-S-S替换,另外两条复杂支链不变,则变成图3所示的Ⅳ 3T1R型机构[17],显然,该机构的自由度数、方位特征与图1机构相同,但耦合度仍为κ=2。

图3 Ⅳ型3T1R并联机构Fig.3 Ⅳ type 3T1R PM
2.2.2 Ⅳ型3T1R并联机构的降耦设计
将图3机构的动平台1上的转动副R13、R43轴线重合,则成为图4a所示的动平台1上有3个受力点的机构[18],其耦合度计算如下。
(1)由2条复杂支链构成的第1回路
SOC1{-R11∥R12(-(◇4R)1-)∥
R43(-(◇4R)2-)∥R42∥R41-}
其独立位移方程数和约束度分别为
(2)第2条支链形成的回路及其约束度分别为
SOC2{-R13-S22-S21-R21-}
(3)第3条支链形成的回路及其约束度分别为
SOC3{-S32-S31-R31-}
由式(2)、式(3),该机构的耦合度、自由度分别为
F=20-4-6-6=4
进一步,将图4a所示机构动平台1上的球副S22、S32重合,得到二次降耦后的新机构,如图4b所示,其动平台1上仅有2个受力点;同理,可计算得到该机构的基本功能(POC集、F=4)不变,但耦合度由κ=2降为κ=1。
(a)一次降耦设计
(b)二次降耦设计图4 Ⅳ型3T1R并联机构的降耦设计Fig.4 CRD for Ⅳ type 3T1R PM
2.3 Ⅴ型3T1R机构的拓扑降耦设计和分析
2.3.1 Ⅴ型3T1R并联机构
如图5所示,该机构由动平台1、静平台0以及4条相同的复杂支链组成[15-20],每条复杂支链都含有1个平面4R平行四边形机构,表示为Ri1∥Ri2(-◇(4Ri5)-)∥Ri3⊥Ri4(i=1,2,3,4)。动平台1上的转动副R14、R24、R34、R44的轴线与动平台1的法线平行,静平台0上的转动副R11⊥R21及R31⊥R41,且为驱动副。
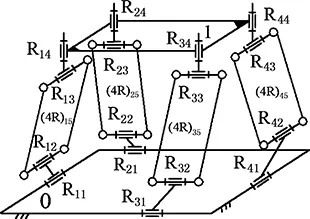
图5 Ⅴ型3T1R并联机构Fig.5 Ⅴ type 3T1R PM
2.3.2 Ⅴ型 3T1R并联机构的降耦设计
将动平台1上的转动副R14、R24轴线重合,则构成图6a所示的机构[21],其耦合度计算如下。
(1)对于第1条单开链
SOC1{-R11∥R12(-◇(4R)15-)∥R13⊥R24⊥
R23(-◇(4R)25-)∥R22∥R21-}
其独立位移方程数和约束度分别为
(2)第2条单开链及其约束度分别为
SOC2{-R14∥R34⊥R33(-◇(4R)35-)∥
R32∥R31-}
(3)第3条单开链及其约束度分别为
SOC3{-R44⊥R43(-(◇4R)45)∥R42∥R41-}
由式(2)、式(3),降耦机构的耦合度、自由度分别为
F=20-6-5-5=4
进一步,将图6a动平台1上的转动副R44、S34的轴线重合,得到二次降耦后的新机构[22],如图6b所示;同理计算其耦合度κ=1。这样,在机构的基本功能(POC集、自由度)都不变的前提下,得到的2个并联机构的耦合度均由κ=2降为κ=1。
(a)一次降耦设计

(b)二次降耦设计图6 Ⅴ型3T1R并联机构的降耦设计Fig.6 CRD for Ⅴ type 3T1R PM
2.4 Ⅵ型3T1R机构的拓扑降耦设计和分析
2.4.1 Ⅵ型3T1R并联机构
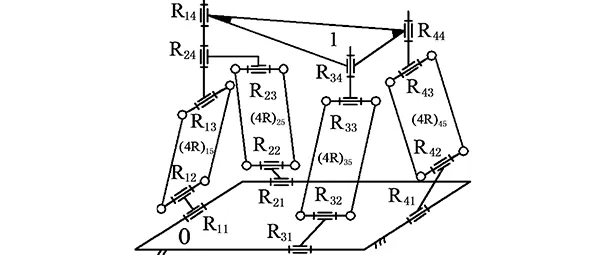
将图5机构静平台0上任一对转动副轴线垂直的2条复杂支链用2条简单支链R-S-S替换,即变成图7所示的Ⅵ型 3T1R机构[20],显然,它们具有与图5机构相同的自由度(F=4)、方位特征以及耦合度(κ=2)。下面对Ⅵ型3T1R机构进行降耦设计。

图7 Ⅵ型3T1R并联机构Fig.7 Ⅵ type 3T1R PM
2.4.2 Ⅵ型3T1R并联机构的降耦设计
将图7所示的机构动平台1上的转动副R14、R24轴线重合,则成为图8a所示的机构[21],其耦合度计算如下。
(1)第1条支链回路的独立位移方程数及其约束度分别为
SOC1{-R11∥R12(-(4R)15-)∥R13⊥R24⊥ R23( -(∥4R)25-)∥R22∥R21-}
(2)第2条单开链及其约束度分别为
SOC2{R14-S42-S41-R41-}
(3)第3条单开链及其约束度分别为
SOC3{-S32-S31-R31-}
由式(2)、式(3),降耦机构的耦合度、自由度分别为
F=22-6-6-6=4
进一步,将图8a机构动平台1上的球副S23、S33重合,则得到图8b所示的二次降耦机构[22];同理,计算出其耦合度κ=1,而机构的POC集和自由度(F=4)都不变。
2.5 Ⅶ型3T1R机构的拓扑降耦设计和分析
2.5.1 Ⅶ型3T1R并联机构
(a)一次降耦设计

(b)二次降耦设计图8 Ⅵ型3T1R并联机构的降耦设计Fig.8 CRD for Ⅵ type 3T1R PM
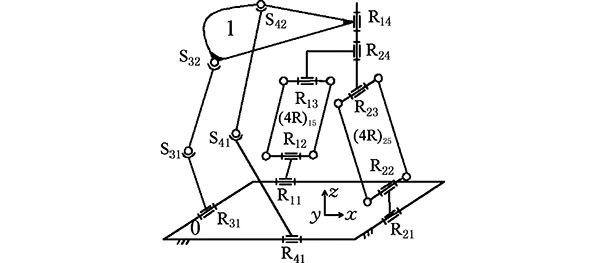
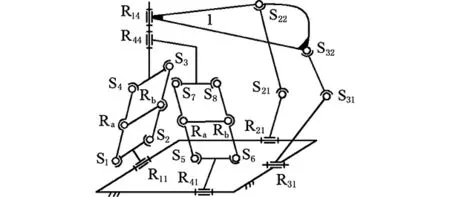
Ⅶ型机构如图9所示,它由动平台1、静平台0、2条R-S-S型无约束支链,以及2条包含由4个球副组成的平行四边形的混合支链组成[23];装配时,为使4个球副S1、S2、S3、S4的球心构成平行四边形,必须在平行四边形中配置一杆带有两转动副(Ra、Rb)的结构,这样可消去其沿平行四边形对角线的一个转动;动平台1上的转动副R14、R24的轴线须平行于动平台1平面的法线;静平台0上的4个转动副R11、R41、R31、R21为驱动副,但R11⊥R41。
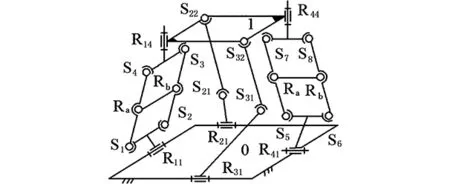
图9 Ⅶ型3T1R并联机构Fig.9 Ⅶ type 3T1R PM
2.5.2 Ⅶ型 3T1R并联机构的降耦设计
将图9机构动平台1上的转动副R14、R44轴线重合,则得图10a所示机构[24],其耦合度计算如下。
(1)第1支链回路的独立位移方程数、约束度分别为

(2)第2支链及其约束度分别为

(3)第3支链及其约束度分别为

由式(2)、式(3),降耦机构的耦合度、自由度分别为
F=22-6-6-6=4
进一步,将图10a机构动平台1上的球副S22、S32重合,则得到二次降耦后的新机构[24],如图10b所示;同理,计算得到新机构的耦合度κ=1,而机构的基本功能(方位特征和自由度)不变。
(a)一次降耦设计

(b)二次降耦设计图10 Ⅶ型3T1R并联机构的降耦设计Fig.10 CRD for Ⅶ type 3T1R PM
至此,已对5个新型的3T1R并联机构,通过其动平台上的转动副、球副重合,进行了结构降耦设计。表1给出了这5种机构结构降耦前后的结构对照,其中,A列为降耦前的5个原始机构(κ=2);B、C列为相应的降耦后的动平台分别具有3个受力点、2个受力点的低耦合度的5个机构(κ=1),这10个新机构的位置正解、动力学正反解可用一维搜索法[25]方便求得数值解,或从易导出的1个一元高次代数方程中求得封闭解。
需要说明的是,表1中A列的5个机构(κ=2)是根据基于方位特征和单开链的并联机构拓扑结构设计理论方法综合而得,当然也可以运用螺旋理论等理论方法综合而得,但无论用哪一种方法综合(这些方法均包含支链设计、支链组合、支链在动静平台的几何布置等3个步骤),其耦合度值均较大,为κ=2。但表1中B列、C列的10个机构很难直接从这些方法综合得到,这说明对由理论方法综合而得的机构进行降耦设计,可以产生机构基本功能不变但耦合度更低的新机型,因此,结构降耦设计既可视为现有并联机构拓扑结构优化的内容之一,又可认为是低耦合度并联机构设计的一种新型实用方法,这是本文的主要创新点所在。
这样,5个耦合度较大(κ=2)以及10个低耦合度(κ=1)的四自由度3T1R新机构均可实现三平移一转动输出,构成了可实现SCARA运动的机构库,为其进一步研究、优选、设计与应用奠定了良好的理论基础。
3 结论
(1)耦合度描述机构拓扑结构的复杂程度,它反映了机构回路内运动学、动力学参数的相互关联依赖关系,耦合度越大,机构越复杂;结构降耦是机构拓扑结构优化设计的重要内容和手段之一,也是低耦合度并联机构设计的一种新型实用方法。
(2)将动平台上的转动副或球副进行重合,可以使并联机构的耦合度降低。
(3)5个原始3T1R并联机构的耦合度为2,而本文提出的10个低耦合度(κ=1)的新机构,其运动学正解、动力学正反解易用一维搜索法方便求得数值解,或可从易导出的1个一元高次代数方程求得封闭解,还可使机构的结构设计、制造变得简单,这对机构的应用具有重要意义。
[1] 袁山.SCARA机器人——依然快捷和可靠[J].机器人技术与应用,2005(5):31-33.YUANShan.SCARARobot—StillFastandReliable[J].RobotTechniqueandApplication,2005(5):31-33.
[2]CLAVELR.DevicefortheMovementandPositioningofanElementinSpace:US,4976582[P]. 1990-12-11.
[3]ABB.IRB360Flexpicker[EB/OL]. [2015-05-06].http: //www.new.abb.com/products/robotics/industrials-robots/irb-360.
[4]PIERROTF,COMPANYO.H4:aNewFamilyof4-dofParallelRobots[C]//ProceedingsoftheIEEE/ASMEInternationalConferenceonAdvancedIntelligentMechatronics,Atlanta.NewYork:IEEE,1999:508-513.
[5]KRUTS,COMPANYO,BENOITM,etal.I4:aNewParallelMechanismforSCARAMotions[C]//ProceedingsoftheIEEEInternationalConferenceonRoboticsandAutomation.Taipei:IEEE,2003:1875-1880.
[6]NABATV,COMPANYO,KRUTS,etal.Part4:VeryHighSpeedParallelRobotforPick-and-place[C]//ProceedingsoftheIEEE/RSJInternationalConferenceonIntelligentRobotsandSystems,Alberta.NewYork:IEEE,2005:1202-1207.
[7] 赵铁石,黄真.欠秩空间并联机器人输入选取的理论和应用[J]. 机械工程学报,2000,36(10):81-85.ZHAOTieshi,HUANGZhen.TheoryandApplicationofSelectingActuatingComponentsofSpatialParallelMechanisms[J].ChineseJournalofMechanicalEngineering, 2000, 36(10): 81-85.
[8] 金琼,杨廷力,刘安心,等.基于单开链单元的三平移一转动并联机器人机构型综合及机构分类[J]. 中国机械工程,2001,12(9):1038-1043.JINQiong,YANGTingli,LIUAnxin,etal.KinematicsAnalysisofaParallelPneumaticandHydraulicLinkageBasedonSingle-opened-chain[J].ChinaMechanicalEngineering, 2001, 12(9): 1038-1043.
[9] 杨廷力,金琼,罗玉峰,等. 用于虚轴机床与机器人等的一类(三平移一转动)并联机构:中国,200310106012.4[P].2003-10-18.YANGTingli,JINQiong,LUOYufeng,etal.AClassof3T1RParallelMechanismsUsedforVirtualAxisMachineToolsandRobots:China,200310106012.4[P]. 2003-10-18.
[10] 黄田,刘海涛,李曚. 五自由度机器人:中国,CN1709657[P]. 2005-7-11HUANGTian,LIUHaitao,LIMeng.TheRobotwithFiveDegreeofFreedom:China,CN1709657[P].2005-7-11.
[11] 刘辛军,谢福贵,王立平,等. 一种可实现SCARA运动的四自由度单动平台并联机构:中国,201210435375.1[P]. 2012-11-02.LIUXinjun,XIEFugui,WANGLiping,etal.AFourFreedomofDegreeParallelMechanismwithSingleMovingPlatformWhichCanAchieveScaraMove:China,201210435375.1[P]. 2012-11-02.
[12]YANGTL.StructuralAnalysisandNumberSynthesisofSpatialMechanisms[C]//Proc.ofthe6thWorldCong.ontheTheoryofMachinesandMechanisms.NewDelhi,1983: 280-283.
[13]SHENHuiping,YANGLiangjie,MENGQingmei,etal.TopologicalStructureCoupling-reducingofParallelMechanisms[C]//2015IFToMMWoldCongress,2015,Taipei,China.DOI: 10.6567/IFToMM.14TH.WC.OS13.120.
[14] 沈惠平,朱小蓉,尹洪波,等.并联机构的结构降耦原理及其设计方法[J]机械工程学报,2016,52(23):102-113.SHENHuiping,ZHUXiaorong,YINHongbo,etal.ThePrincipleandDesignMethodforStructureCoupling-reducingofParallelMechanisms[J].JournalofMechanicalEngineering,2016,52(23): 102-113.
[15]YANGTingli,LIUAnxin,SHENHuiping,etal.TopologicalStructureSynthesisof3T1RParallelMechanismBasedonPOCEquations[M]//IntelligentRoboticsandApplications.Berlin:SpringerInternationalPublishing, 2016:147-161.
[16] 杨廷力, 刘安心,罗玉峰,等.机器人机构拓扑结构设计[M].北京:科学出版社, 2012.YANGTingli,LIUAnxin,LUOYufeng,etal.TheoryandApplicationofRobotMechanismTopology[M].Beijing:ChinaSciencePress, 2012.
[17] 沈惠平,杨廷力,李菊,等,一种三平移一转动并联机器人装置:中国,201510567133,1[P]. 2015-9-8.SHENHuiping,YANGTingli,LIJu,etal.AParallelRobotDevicewithThreeTranslationsandOneRotation:China, 201510567133.1[P].2015-9-8.
[18] 沈惠平,熊坤,杨廷力,等.一种低耦合度三运动副动平台的三平移一转动并联机器人装置:中国,201610141841.3[P]. 2016-03-12SHENHuiping,XIONGKun,YANGTingli,etal.ALowCouplingDegreeThree-translationandOne-rotationParallelRobotDevicewithaThree-jointMovingPlatform:China, 201610141841.3[P].2016-03-12.
[19] 沈惠平,曾氢菲,强恒存,等.一种低耦合度两运动副动平台的三平移一转动并联机器人装置:中国,201610141696.9 [P]. 2016-03-12.SHENHuiping,ZENGQingfei,QIANGHengcun,etal.ALowCouplingDegreeThree-translationandOne-rotationParallelRobotDevicewithaTwo-jointMovingPlatform:China, 201610141696.9 [P].2016-03-12.
[20] 沈惠平,杨廷力,邓嘉鸣,等.一种三平移一转动并联机器人机构:中国,201510566039.4[P].2015-9-8.SHENHuiping,YANGTingli,DENGJiaming,etal.AParallelRobotMechanismwithThreeTranslationsandOneRotation:China, 201510566039.4[P].2015-9-8.
[21] 沈惠平,强恒存,邵国为,等.一种低耦合度三运动副动平台的三平移一转动并联机器人机构:中国,201610141468.1[P]. 2016-03-12.SHENHuiping,QIANGHengcun,SHAOGuowei,etal.ALowCouplingDegreeThree-translationandOne-rotationParallelRobotMechanismwithaThree-jointMovingPlatform:China, 201610141468.1[P].2016-03-12.
[22] 孟庆梅,沈惠平,邵国为,等.一种低耦合度两运动副动平台的三平移一转动并联机器人机构:中国,201610141831.X[P]. 2016-03-12.MENGQingmei,SHENHuiping,SHAOGuowei,etal.ALowCouplingDegreeThree-translationandOne-rotationParallelRobotDevicewithaTwo-jointMovingPlatform:China, 201610141831.X[P].2016-03-12.
[23] 沈惠平,杨廷力,朱伟,等.一种三平移一转动并联机器人平台:中国,201510566840. 9[P]. 2015-9-8.SHENHuiping,YANGTingli,ZHUWei,etal.AParallelRobotPlatformwithThreeTranslationsandOneRotation:China, 201510566840. 9 [P]. 2015-9-8.
[24] 李菊,沈惠平,强恒存,等.一种低耦合度三运动副动平台的三平移一转动并联机器人平台:中国,201610141614.0[P]. 2016-03-12.LIJu,SHENHuiping,QIANGHengcun,etal.ALowCouplingDegreeThree-translationandOne-rotationParallelRobotPlatformwithaThree-jointMovingPlatform:China, 201610141614.0[P].2016-03-12.
[25]SHENHP,TingKL,YangTL.ConfigurationAnalysisofComplexMultiloopLinkagesandManipulators[J].MechanismandMachineTheory,2000, 35(3): 353-362.
(编辑 苏卫国)
Topological Design for a Class of Novel 3T1R Parallel Mechanisms with Low Coupling Degree Based on Coupling-Reducing
SHEN Huiping QIANG Hengcun ZENG Qingfei MENG Qingmei YANG Tingli
Research Center for Advanced Mechanism Theory,University of Changzhou,Changzhou,Jiangsu,213016
Comparing to the 3-DOF Delta mechanism, the 4-DOF parallel mechanisms which might achieve selective compliance assembly robot arm(SCARA ) motion (i.e., three translations and one rotation) had their own complex topological structures, which resulted in the complexity of solutions for forward kinematics and dynamics. Therefore, the researches and developments of novel SCARA parallel mechanisms were still open issues. Reducing coupling degrees of these mechanisms might directly reduce the difficulties of solutions for forward kinematics and dynamics of the mechanisms. Based on the methods for structure coupling-reducing proposed by the authors, the structure coupling-reducing optimization design for five novel practical SCARA mechanisms whose coupling degreeκwere 2 proposed by authors was performed. Ten novel SCARA mechanisms with coupling degreeκ=1 were obtained, both their degrees of freedom and the output motion type of the moving platform kept to be constant. Thus, the solutions for forward kinematics and dynamics of these ten novel mechanisms with coupling degreeκ=1 might be easily obtained by using one dimensional search method, or by solving a one-variable polynomial equation derived. This paper provides a theoretical basis for topological optimization, design and applications for these novel SCARA mechanisms.
structure coupling-reducing; topological structure optimization; position and orientation characteristics; forward kinematics; coupling degree
2016-04-26
江苏省重点研发计划资助项目(BE2015043);国家自然科学基金资助项目(51375062,51475050)
TH112
10.3969/j.issn.1004-132X.2017.10.005
沈惠平,男,1965年生。常州大学机械工程学院教授、博士研究生导师。主要研究方向为机构学、并联机器人、机械设计。获江苏省、教育部科技进步二等奖2项。发表论文190余篇。授权发明专利65项。E-mail:shp65@126.com。强恒存,男,1990年生。常州大学机械工程学院硕士研究生。曾氢菲,女,1993年生。常州大学机械工程学院硕士研究生。孟庆梅,女,1973年生。常州大学机械工程学院副教授。杨廷力,男,1940年生。常州大学机械工程学院特聘教授。