不同导航方式无人机侦察效能比较研究∗
2017-06-05,
,
不同导航方式无人机侦察效能比较研究∗
王光辉1刘文超1,2谢宇鹏1王越2
(1.海军航空工程学院烟台264001)(2.92026部队威海264300)
无人机对目标进行侦察是无人机作战使用的主要模式之一,无人机侦察能力除与机载侦察设备有关外,机载导航设备对侦察效能也有很大的影响。为此,以CCD摄像机为机载侦察设备,研究了一种基于完成任务能力和飞行代价函数的无人机侦察效能评估模型,并对不同导航方式、不同干扰强度条件下,无人机对给定区域的侦察效能进行了评估,得到了不同导航方式对无人机侦察效能的评价曲线,为根据无人机的使命任务选择导航方式提供了决策依据。
无人机;侦察效能;导航方式;干扰
Class NumberV279
1 引言
导航战是信息战的一种。在信息对抗中,确定兵力、装备及目标的精确位置十分重要。随着无人机的广泛应用,其在复杂电磁环境中,对导航信息的精度、全时性、抗干扰性和使用范围的要求越来越高[1]。无人机运用单一固定的导航方式执行侦察任务已经很难达到预期的目的。因此,需要针对不同的干扰环境,采用相应的导航方式。目前,对无人侦察机作战效能的研究比较多,关于导航对无人机侦察效能的影响研究还比较少,国内外还没有系统的方法和准则,所以对不同导航方式下无人机的侦察效能进行研究是十分必要的。
无人机的侦察方式主要有四种,分别为
1)点侦察:有独立职能且面积较小的目标。
2)带侦察:两个参考点之间的直线段搜索。
3)线侦察:沿着指定航线飞行对线状地物的连续侦察。
4)区域侦察:针对面积较大的指定工作区域,自主地对整片区域覆盖侦察[2]。
无人机的导航方式有:卫星导航、惯性导航、无线电导航、多普勒导航、地磁导航、天文导航、地形匹配导航等。其中最普遍的导航方式是卫星导航、惯性导航和无线电导航[3]。
无人机执行侦察任务时,所搭载的传感器类型有:红外传感器、光学仪器、CCD(Charge Coupled Device)摄像机、多普勒或合成孔径雷达等[4~5]。
目前,对于无人侦察机的单种侦察载荷的侦察效能评估已经有很多成熟的评估模型[6~7]。本文主要对在不同强度的电子干扰条件下,无人机分别利用GPS、罗兰C以及惯性导航的方式,以CCD摄像机作为侦察手段,进行大面积区域侦察时的效能进行研究,以此建立无人机的侦察效能模型。
2 传感器模型
无人机进入侦察状态时,目标必须位于CCD摄像机的靶面(图1阴影区)内。当无人机在一定高度水平飞行,并保持垂直视场角和俯仰角不变时,CCD的靶面扫过的区域为一条带状区域(探测带),此探测带的宽度为靶面的短轴宽度D。在侦察的过程中无人机想要对侦察区域进行全面侦察,必须使探测带扫描完全部的侦察区域。

图1 CCD摄像机瞬时探测示意图
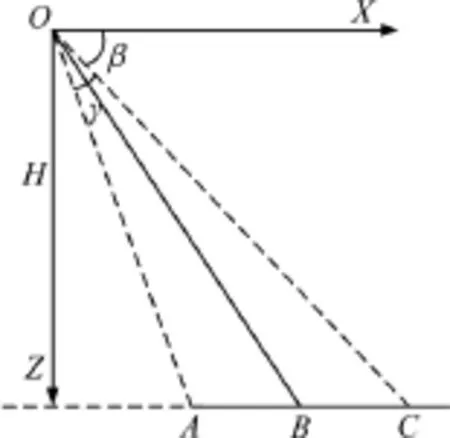
图2 瞬时探测区域在铅锤面内的投影
如图2所示:∠AOC为CCD的垂直视场角,用γ表示;∠COX为CCD光轴与机轴所形成的俯仰角,用β表示;无人机的飞行高度为H。无人机做定高飞行时,由数学知识可以算出:

3 系统侦察能力分析
无人机完成任务的能力W实际上就是无人机在侦察区域S(位于水平面内的矩形平面)中侦察目标的能力,对于巡逻侦察任务,由于没有确切的单个搜索目标或更多的目标信息,效能指标主要选用覆盖指定搜索海域的飞行代价(飞行次数、油耗、时间)和完成任务能力(搜索面积的大小)来衡量[8]。
3.1飞行代价模型
飞行代价效能是指对指定区域进行侦察时实际飞行代价占理论飞行代价的比值大小。
由于要对S进行全扫描且CCD一次扫描的结果为一条探测带,因此可知如图3,在S中相互平行的两条侦察路径间的距离即为探测带宽度D。
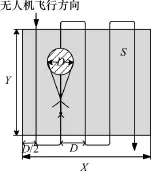
图3 光栅式侦察示意图
由于无人机自身条件的约束且为了使无人机的飞行路径最短,对于转弯点,按文献[9]所述的最小转弯半径Rmin进行90°转弯即可。
则在区域S中进行一次侦察的路径长度为

设N为侦察路径中与路径段Y(侦察区域的宽度,单位为m)平行的直线侦察路径段数量,则可得

解方程得:
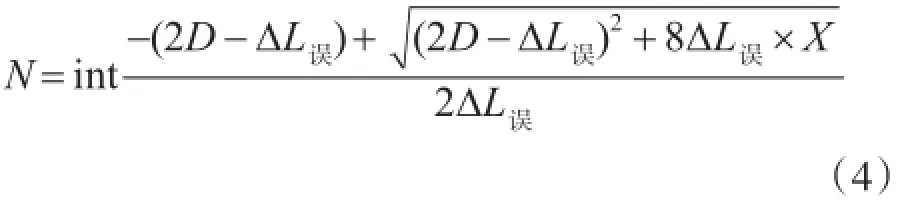
式中:X为侦察区域的长度,单位为m。ΔL误为导航误差随时间变化量(主要是惯性导航完成一次侦察到下一次侦察开始时的误差变化大小)。为便于模型计算,假设惯导误差随时间呈线性变化,即:

式中:V为无人机侦察时的飞行速度,单位为m/s;ΔL系为导航系统误差变化量,单位m/s。则无人机侦察总路径长度为

无人机执行侦察任务时付出的飞行代价W2(W2∈[0,1])包括如下三部分:1)侦察开始时飞行路径的长度代价Dpath;2)任务开始时所费的油料代价Coil;3)完成侦察所费的时间代价Ttime。由此,可得下式:

无人机匀速飞行时,其飞行的耗油量Coil表示为

式中:ti、roil、L、V为无人机侦察开始时的飞行时间、耗油率、航路长度、飞行速度。
无人机在执行侦察任务时一般情况下作匀速飞行。由式(8)可知:无人机作匀速飞行时,它的耗油量、飞行时间都与它所飞过的航路长度成正比,因此,可以认为无人机的飞行时间和耗油量是其航路长度的函数[10],则:

3.2完成任务能力模型
完成任务效能是指对侦察区域进行侦察时实际扫到的有用区域占侦察区域的比例大小。
为简化模型,假定侦察任务中的CCD摄像机参数和大气环境参数都是确定不变的,侦察区域电磁环境对CCD摄像机的探测结果无影响。则如图4所示,实际测绘区与侦察区域的偏差,主要由导航系统定位误差产生。因此可以得到完成任务效能算式如下:
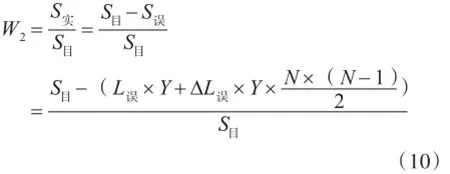
式中:S目为侦察区域面积,S实为实测任务区域面积,S误为导航误差造成的没有侦察到的面积,L误为导航误差大小。
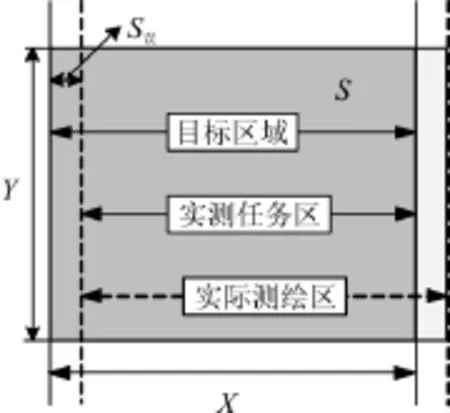
图4 扫描区域俯视图
3.3侦察效能评估模型
无人机执行侦察任务时进行效能评估的目的就是在无人机付出最小代价的情况下,按侦察目的,以最高的效能完成侦察任务,它的评估模型为

式中:F为无人机执行侦察任务时的效能值;K1,K2为大于零、小于1的常数,用来根据需要调整能力与代价之间的权重。
4 仿真实例
4.1仿真条件
1)无人机参数。无人机侦察时高度H= 1000m,速度V=100m/s,转弯半径Rmin=200m。
2)CCD参数。CCD的俯仰角β=10°,视场角γ=9°,安装平台上,CCD摄像机镜头在偏航方向的转动范围为±180°。
3)侦察方案。采用光栅式纵向侦察方案。
4)侦察区域为宽度(Y=40000m)不变,长度(X=0~50000m)变化的矩形海域。
5)K1和K2值分别取0.1和0.9。
6)不同电磁干扰状态下,各导航方式定位误差参数(见表1)。在抗能量压制干扰方面,罗兰C系统比GPS系统抗干扰能力强,需要更大的干扰设备和干扰功率,战时大面积的干扰较难实现。
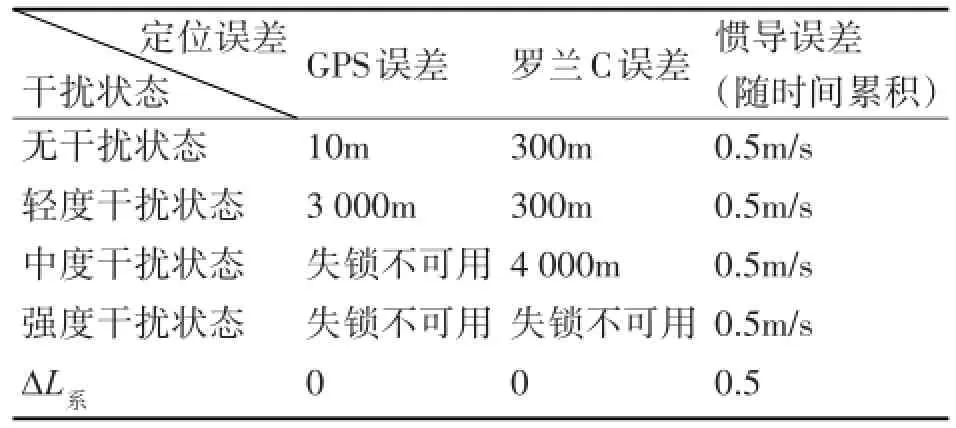
表1 不同条件下系统定位误差参数
4.2仿真结果分析
对建立的模型进行仿真,仿真结果如图5~8所示(图中效能初始值大小和斜率变化的原因与导航系统误差值大小有关;基于GPS和罗兰C系统的侦察效能曲线为平滑的曲线;基于惯导的侦察效能曲线为单位面积内变化的线段,线段的长度大小与CCD摄像机的探测宽度和无人机侦察高度有关)。
仿真结果表明:
1)无干扰状态时,GPS系统作用下的侦察效能优于罗兰C和惯导,但随着干扰强度的增加,效能逐渐减小,直至不可用,这与GPS系统信号弱,且容易受干扰的特点有关;
2)在GPS和罗兰C系统都可用的状态下,随着侦察区域面积的增大,两个系统的侦察效能值逐渐逼近;
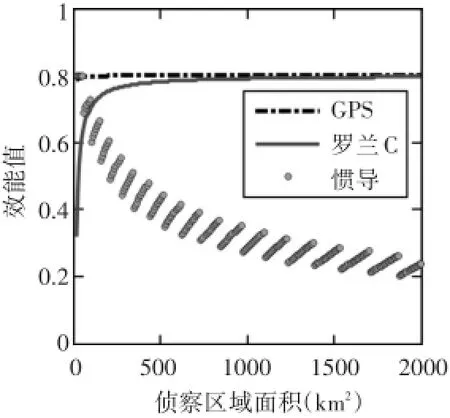
图5 无干扰状态

图6 轻度干扰状态
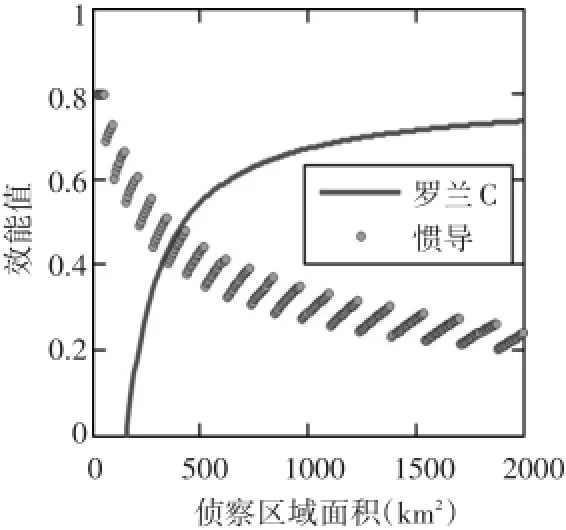
图7 中度干扰状态
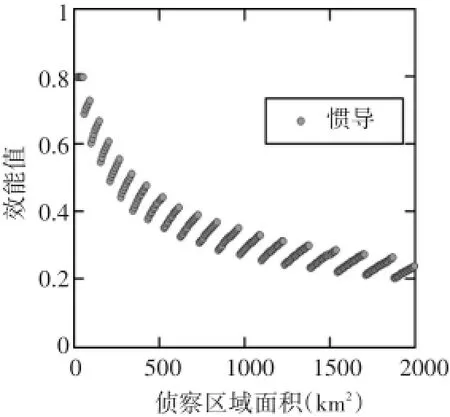
图8 强度干扰状态
3)采用能量压制干扰时,罗兰C系统作用下的侦察效能比GPS要好;
4)侦察区域面积较小时,惯导系统作用下的侦察效能最大,随着侦察区域面积的不断增大,惯导系统作用下的侦察效能整体上逐渐减小,这与惯导系统误差随时间积累有关;
5)三个系统不同时段、不同干扰状态下的侦察效能各有优劣,可以根据具体的任务要求,通过调整相关参数,利用文中模型得到一个合理的导航方案或者组合导航的方式,进而使侦察效能实现最大化。
5 结语
本文从导航系统定位误差对无人机侦察效能的影响方面入手,给出了一种无人机侦察效能模型,通过仿真计算表明模型的可用性,为无人机在复杂电磁干扰条件下,导航方式的选择提供了理论决策依据和实际应用价值。
[1]饶建国,董金鑫.信息战中的导航作战[J].舰船电子对抗,2004,27(6):6-8.
RAO Jianguo,DONG Jinxin.Navigation Countermeasure in Information Warfare[J].Shipboard Electronic Counter⁃measure,2004,27(6):6-8.
[2]黄丁才.无人侦察机航线与传感器规划方法研究[D].长沙:国防科学技术大学,2009:1-9.
HUANG Dingcai.THE method of UAV research and sen⁃sors route planning[D].Changsha:National University of Defense Technology,2009:1-9.
[3]顾云涛.无人机导航技术研究[J].现代导航,2013(3):198-200.
GU Yuntao.Research on navigation System of Unmanned Aircraft Vehicle[J].Modern navigation,2013(3):198-200.
[4]吴永亮.美国海军新型情报、监视与侦察飞机发展综述[J].飞航导弹,2012(5):67-73.
WU Yongliang.The navy's new intelligence,surveillance and reconnaissance aircraft development were reviewed[J].Aerodynamic Missile Journal,2012(5):67-73.
[5]张旺,申洋,陈伟.无人机多侦察载荷协同侦察效能评估[J].电光与控制,2014,21(3):1-4.
ZHANG Wang,SHEN Yang,CHEN Wei.Assessment on Multi-Playload Collaborative Reconnaissance Effective⁃ness of UAVs[J].Electronics Optics&Control,2014,21(3):1-4.
[6]Moitra A,Mattheyses R M,Didomizo V A,et al.The multi-vehicle reconnaissance route and sensor planning[J].IEEE Transactions on Aerospace and Electronic Sys⁃tems,2003,39(3):799-812.
[7]吕峰,王卫华,黄德所.侦察无人机作战效能评估准则研究[J].智慧控制与仿真,2007,29(3):78-80.
LV Feng,WANG Weihua,HUANG Desuo.Estimating the criterion of operation efficiency for unmanned reconnais⁃sance aerial vehicel[J].Command Control&Simulation,2007,29(3):78-80.
[8]崔翰明.反潜直升机搜潜效能分析[J].直升机技术,2013(3):33-41.
CUI Hanming.Effectiveness Analysis of Anti-submarine Warfare Patrol Aircraft[J].HELICOPTER TECHNIQUE,2013(3):33-41.
[9]王庆江,高晓光,符小卫.无威胁情况下任意两点间的无人机路径规划[J].系统工程与电子技术,2009,31(9):2157-2162.
WANG Qingjiang,GAO Xiaoguang,FU Xiaowei.Path planning of UAV between two random points without threats[J].Systems Engineering and Electronics,2009,31(9):2157-2162.
[10]王庆江,彭军,倪保航,等.无人机大区域侦察研究[J].电光与控制,2015,22(6):39-42.
WANG Qingjiang,PENG Jun,NI Baohang,et al.Re⁃search on Large-Range Reconnaissance of UAV[J]. Electronics Optics&Control,2015,22(6):39-42.
Comparison of UAV Reconnaissance Effectiveness under Different Navigation Methods
WANG Guanghui1LIU Wenchao1,2XIE Yupeng1WANG Yue2
(1.Naval Aeronautical and Astronautical University,Yantai264001)(2.No.92026 Troops of PLA,Weihai264300)
As UAV mainly works for reconnaissance,its reconnaissance ability is effected not only by airborne reconnaissance equipment but by airborne navigation equipment.Taking a CCD camera as airborne reconnaissance equipment,a effectiveness eval⁃uation model for UAV reconnaissance based on mission achievement ability and flight cost is studied.Furthermore,UAV reconnais⁃sance effectiveness of given area is evaluated under different navigation method and different interference intensity,and the evalua⁃tion curve is attained,which provides a decision foundation of the choice of navigation methods for UAV mission.
UAV,reconnaissance effectiveness,navigation method,interference
V279
10.3969/j.issn.1672-9722.2017.05.008
2016年11月12日,
2016年12月14日
王光辉,男,博士,教授,研究方向:武器系统效能评估。
