基于五杆机构的注射式免耕播种成穴轨迹分析与参数求解
2017-05-25刘宏新改广伟相斌斌
刘宏新,王 盼,改广伟,相斌斌
基于五杆机构的注射式免耕播种成穴轨迹分析与参数求解
刘宏新,王 盼,改广伟,相斌斌
(东北农业大学工程学院,哈尔滨,150030)
针对特殊轨迹要求进行机构分析与参数求解,为注射式免耕播种模式的实施奠定基础。轨迹形成机构基于五杆机构设计,在建立机构数学模型的基础上,分析双曲柄等速五杆机构的存在条件及空间约束;给定成穴点相对轨迹的可行域,利用CATIA(computer aided three-dimensional interactive application)进行参数化建模、运动仿真及轨迹绘制;运用轨迹区域定位法,研究成穴器端点的区域轨迹分布特性;运用数值循环比较法,研究参数对轨迹的影响规律,结合约束条件,求得对应不同株距的结构调整参数与作业参数组合,可形成251.2~344.7 mm竖直方向的有效作业轨迹。样机试验及高速影像分析表明,基于五杆的免耕播种轨迹形成机构能够在秸秆高度还田的情况下带动成穴器完成打穴作业,能有效穿透秸秆并按要求成穴,刮带现象少。研究也证实了轨迹区域定位与数值循环比较法相结合可有效提高五杆机构参数组合求解的效率,为实现大长短轴比的类椭圆形轨迹的五杆机构参数的求解提供有效的方法。
农业装备;农业机械;播种;免耕播种;注射式;五杆机构;轨迹区域定位;数值循环比较
0 引 言
为增强农业的可持续发展能力,保护性耕作在中国得到广泛重视。保护性耕作采用免耕、少耕及残留秸秆覆盖地表的方式对农田进行播种,不仅可以降耗,减少作业成本,还有利于保水保墒,提高土壤肥力和抗旱能力[1-3]。免耕播种作为保护性耕作的四大内容之一,是实施保护性耕作各项的关键技术。现有的免耕播种机为保证种子的顺利下播,一种方法是采用圆盘切刀切断秸秆(根茬),切开覆盖层,开出缝隙,从而方便作业部件顺利通过,这种方式显然增加了功耗,同时对垂直载荷要求较大,当破茬不完全时,可能从土壤中带出整个残茬,影响播种质量[4],并且对切割部件要求较高,当秸秆量大时易发生缠绕堵塞。另一种方式是将秸秆层移除,清理出无覆盖层的播种条带,清秸覆秸的过程会消耗一定功耗,同时在土壤硬度小于18.2 kg/cm2,湿度小于35%的条件下,随着切茬深度的增加,土壤扰动量急剧增大,会扬起土壤,引起环境污染[5-7]。
针对上述问题,提出一种注射式免耕精密播种方式,采用特定运动轨迹成形机构带动成穴器穿透地表覆盖物(秸秆)进行打穴播种,无需对秸秆残茬进行任何处理,对土壤扰动小、作业工序少、功耗低、可靠性高、适应性好。
目前采用类似运动轨迹及动作过程的农业机械主要有插秧机、液态施肥机[8]和适用于覆膜的穴播机。插秧机分插机构为保证秧苗的直立度,避免伤秧、倒秧及搭桥现象,较好的秧针相对运动轨迹为“腰子形”或“海豚形”[9-10];现有的液态施肥机为达到沟痕宽度小,深度满足不同作物需求的目的,其椭圆齿轮行星系扎穴机构喷肥针的相对轨迹为“腰子形”[11-12];覆膜穴播机分为滚轮式和垂直插入式,在工作时需保证穴口的大小及深度,避免撕膜[13-17],其相对轨迹均为圆形。
但是,对于有秸秆残茬覆盖的复杂地表,成穴机构需要在竖直方向具有大有效行程,以同时满足能够穿透足够厚度的覆盖物、避免刮带、扰动小等多种良好成穴条件,上述现有的机构均不符合要求。因此,设计一种大有效行程专用轨迹形成机构是实现注射式免耕播种的前提,同时为大行程类椭圆形相对轨迹成形机构的参数求解探索一套行之有效的流程和方法。
1 成穴轨迹分析与机构选择
1.1 成穴轨迹分析
成穴机构应可穿透较厚秸秆且不刮带秸秆,其成穴器端点理想的绝对运动轨迹如图1a所示,该轨迹由成穴器端点相对机架的相对运动轨迹与机具水平方向运动轨迹的合成,本文将其定义为“门字形”轨迹。为满足免耕的农艺要求和作业环境,其有效行程(高度)1越大越好,且绕扣最大横弦长越小越好,为绕扣交点高度。
选择类椭圆作为目标相对轨迹,通过调整机构参数,改变形成类椭圆的长轴或短轴以满足绝对轨迹参数要求。类椭圆相对轨迹及其绝对轨迹如图1b所示。
1.2 机构选择
五杆是具有多自由度最简单的机构,机构相对稳定,具有较多的尺寸和相位角参数、不同的驱动方式及传动比,可实现丰富的曲线轨迹,因此采用五杆机构作为成穴轨迹的形成机构[18]。
对于五杆机构参数的求解,当前主要采用解析法与软件相结合的方法。马良等由ADAMS(automatic dynamic analysis of mechanical systems)软件建立参数化模型,寻求连架杆输出轨迹的改变规律[19];方芳借助于计算机辅助设计的方法,研制了齿轮五杆机构的轨迹曲线生成系统[20];陶军等经过仿真和试验验证了图解法与解析法相结合是确定齿轮五杆机构实现预定轨迹的有效方法[21]。
以上研究均为在给出五杆机构参数的前提下,研究轨迹的形成规律。但对于本文所面对的问题中,机构的参数组合是要解决的首要问题。
研究方案为在建立数学模型的基础上,给定成穴端点相对轨迹的可行域,结合CATIA机械设计模块、知识工程模块与数字样机模块,对机构进行参数化建模、运动仿真及轨迹绘制,寻求区域轨迹特性,并研究各参数对轨迹的影响规律,结合目标函数的取值范围求解机构参数,并给出求解流程及方法,以满足穴式免耕播种的要求。
1.3 工作原理与结构分析
由于安装空间存在一定限制,同时需确保机构结构紧凑,因此合理的设计五杆机构各参数,使其在满足轨迹要求的基础上尽可能减小五杆机构所占的安装空间是实现成穴免耕播种的关键。
1.3.1 工作原理
五杆成穴机构示意图如图2所示,为便于机构的实际应用,设置双曲柄的传动比为1,即本文主要针对等速双曲柄五杆机构进行研究。BC杆与AE杆为原动件,以相同转速同向转动,进而带动连杆CD、DE转动,DF与连杆CD夹角固定并在其带动下进行成穴。
1.3.2 结构分析
以A点为坐标原点,水平方向为轴,竖直方向为轴,建立直角坐标系,如图2所示,此时AE杆处于水平方向。
本设计的五杆机构属于双曲柄型,只有选取合适的尺寸参数才能使机构形成完整封闭的连杆曲线。对于五杆机构,其各参数必须满足一定的基本约束条件[22-27]。
1)双曲柄存在条件
为使机构可以整周运转,并且得到相应轨迹,需要使两曲柄同时满足曲柄存在的条件。
BC成为曲柄的条件:

EA为曲柄的条件为:
(2)
两杆同时为曲柄条件:

其中:
2)死点不存在条件
为避免死点,在机构运动过程中,C、D、E三点应始终构成封闭三角形,须满足以下条件:

3)最小传动角
传动角越大,对机构的传力越有利。为保证机构传力性能良好,应使最小传动角min≥40o,五杆机构的传动角为两连杆之间的锐角[18]。当机构处于最小传动角时,可得:

2 轨迹区域分布特性与变化规律
2.1 空间约束
为保证机构在整机安装及作业时与其他机构不发生干涉、碰撞,将机构布置为空间结构,其空间限制如图3所示。
1)1为机架高度。为保证作业时种子顺利从种箱落入成穴机构,将种箱放置在机架上方,要求机构所能达到的最高位置C'小于机架的高度,由图3可知,机架高度需满足如下公式
1=+5+1+(6)
式中为机构最高点位置距离机架的高度,mm。
2)为A点距离地面的高度。为保证机具具有良好的通过性,要求
≥4+1(7)
式中1为秸秆残茬高度,mm。
3)3为播种深度。本文针对不同农作物,播深取值范围为30~50 mm[28]。
4)为成穴端点F与A点的初始水平距离。在成穴过程中,要求该值在一定范围内越小越好。在1、4长度不变的情况下,可通过调节2和3的长度使两连杆间的夹角变大以减小。
根据市场上一般播种机机架的高度,设定本文机架高度1=820 mm,依据田间秸秆残茬的平均高度[29],取1≤300 mm,0<<10 mm,结合基本约束条件并分析可得如下公式
(9)
5)1、2为F点相对轨迹可行域的长度与高度。
2=+3(10)
2.2 参数化建模
零件参数化建模是指将零件模型中的关键参数变量化,通过参数的修改使零件模型产生特征联动,实现几何模型的修改[30]。
利用CATIA机械设计模块,对成穴机构进行建模与约束创建[31]。对于该机构,需要求解满足要求的参数组合,即五杆各杆件长度及曲柄的初始相位角。利用知识工程模块,对机构进行参数化设计,分别在零件和装配体中对各零件进行参数化,并将各参数进行发布,建立同一参数在零件和装配体中的关联性,便于直接在装配体结构树中更改相应参数实现机构的快速改变与更新。为方便研究参数对轨迹的影响规律,在建模时,以直线代替各杆件,利用CATIA数字样机模块对机构进行运动仿真与轨迹绘制[32]。
据参考文献[33-35]可知,1与4、2与3两组数值的简谐波分别相似,同时改变组内数值大小,对轨迹的形状无明显影响,只会改变轨迹的大小和位置。
根据可实现类椭圆形四杆机构的参数[35]及上述约束条件初定五杆成穴机构参数值为:1=130 mm,2=200 mm,3=200 mm,4=130 mm,5=207 mm,6=500 mm,3=150°,机构参数化模型如图4所示。
图4中,“BC杆”、“EA杆”为曲柄,“CD杆”、“DE杆”为连杆,“ganding5”、“ganding6”及“ganding7”分别为辅助点1、2和辅助线,用于辅助五杆机构沿水平方向的直线运动;“ganding5”与“ganding6”分别为一点。
其中,BC杆分别与辅助点1和CD杆旋转接合,EA杆分别与辅助点2和DE杆旋转接合,CD杆和EA杆旋转接合,辅助点1、2分别和辅助线棱形接合(棱形接合为移动副),设定辅助点1、辅助点2与曲柄BC、EA之间的旋转结合以及与“辅助线”的棱形结合为驱动命令,将“辅助线”设定为固定零件。并通过“公式”命令建立驱动命令的法线,便于使用法则曲线进行模拟。
2.3 轨迹区域定位
篇章格律论是对Halliday衔接理论的补充与延展,它将Halliday等从语法角度提出的句子层面以上非结构性衔接理论补充、扩展至超越小句的语篇层面,关注语篇的旋律,为我们从结构上对语篇衔接进行分析提供了新的有效手段。
通过模拟仿真发现,在其他参数不变的前提下,当DF与CD的夹角3取值不同时,轨迹的形状、大小及位置都会发生改变,区域内各位置轨迹特性如图5所示。
根据轨迹长轴与水平方向的夹角,将轨迹分为3个区域。以区域2中轨迹为基准进行分析,区域1中轨迹向左倾斜,且长轴与短轴比值较小,另结合实际成穴位置,区域1中的轨迹不符合要求;区域2中轨迹长轴方向与水平方向近似垂直,且长轴与短轴比值较大;区域3中轨迹向右倾斜,整体呈缩小趋势。
为方便调整机构参数且满足“3.1”中轨迹可行域的要求,选定区域2中的轨迹特性为目标。
理论条件下3只需满足五杆成穴机构轨迹在区域2即可,但由于成穴机构需在有秸秆残茬覆盖的地表进行成穴,3不同,机构对秸秆残茬穿透能力和扰动情况不同,因此3的取值规律需根据后文的实际试验进行确定。
2.4 相对轨迹的变化规律分析
2.4.1 杆件长度对相对轨迹的影响规律
1与4、2与3两组数值的简谐波分别相似,因此可通过控制三组杆件长度参数(1与4、2与3和5)观察杆件长度对相对轨迹的影响规律,表1为3组杆件长度参数分别变化时相对轨迹参数,图6为3组杆件长度参数分别变化时相对轨迹参数对应的位置关系。
综上所述,可得出以下规律:
1)在1=4的前提下,同步改变其大小,轨迹中心点不变,轨迹大小随1增大(减小)而增大(减小);
2)在2=3的前提下,同步改变其大小,轨迹中心点随2增大(减小)而斜向上(斜向下)偏移,轨迹大小随2增大(减小)而增大(减小);
3)只改变5,轨迹中心点随5增大(减小)而向下(向上)偏移,轨迹大小变化无特定规律。
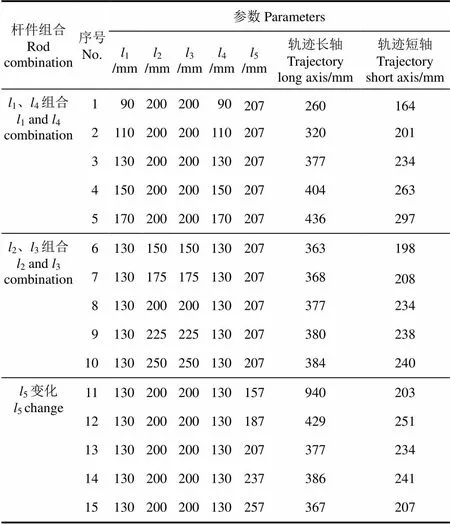
表1 三组杆件长度变化时相对轨迹参数
注(Note):6=500 mm,3=150°,1=-26°,2=0°。
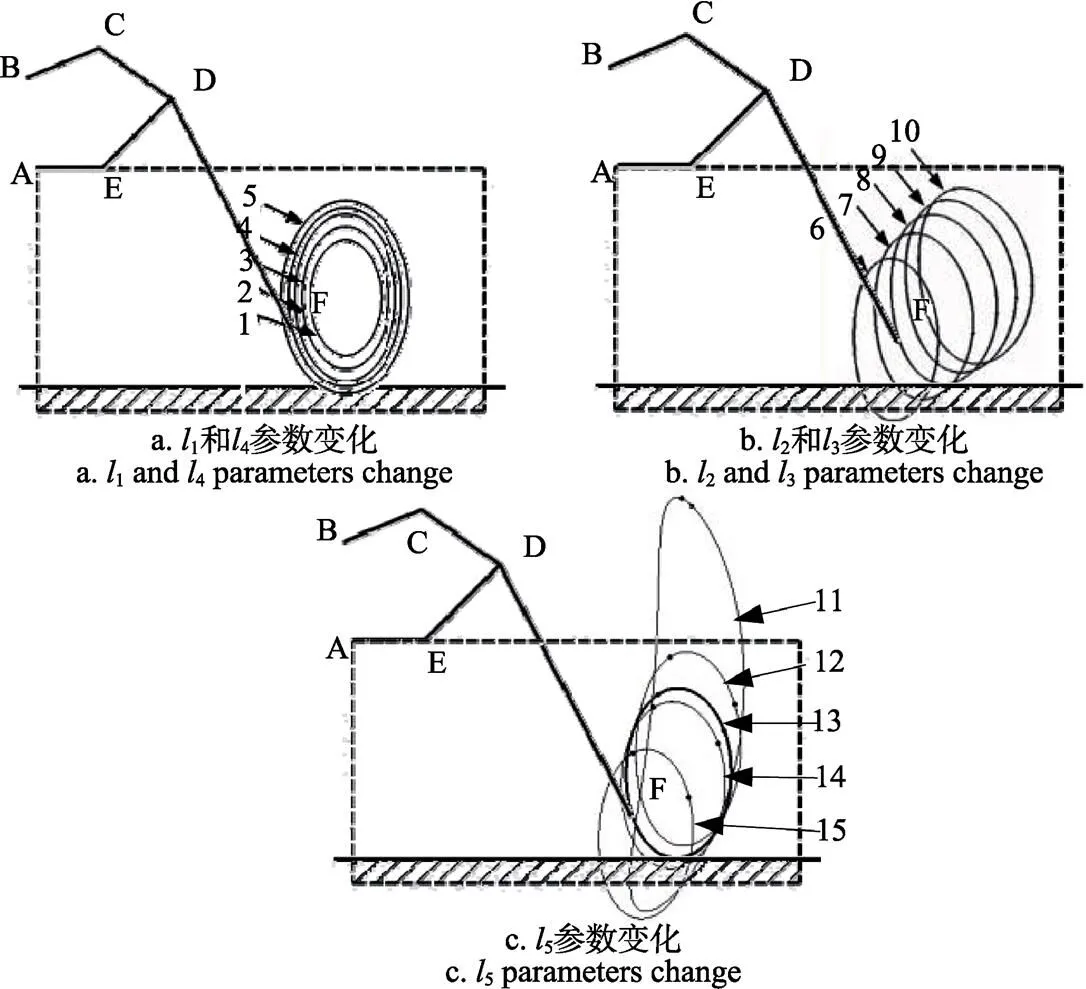
注:图中标号1~15所指轨迹与表1中序号1~15的轨迹参数分别对应。
2.4.2 曲柄初始角度对相对轨迹的影响规律
由于角度参数1对轨迹形状有较大影响,只给出1取不同值时各参数下轨迹的形状及位置关系,如图7所示。可看出,角度对轨迹的形状有较大影响,但无特定规律。角度参数2与1对轨迹的影响类似。
条件约束及参数求解流程如图8所示,图中虚线框所示为数值循环比较法求解的过程。
根据参数求解流程图,结合穴式播种的一般速度范围并充分考虑较高作业速度的要求,在3~8 km/h范围内[28],求得对应不同株距且满足轨迹要求的机构调整参数及作业参数如表2所示。
根据对应不同株距的结构调整参数与作业参数组合,可形成251.2~344.7 mm竖直方向的有效作业轨迹。有效作业轨迹参数即有效高度以及绕扣最大横弦值,如表3所示,满足设计要求。
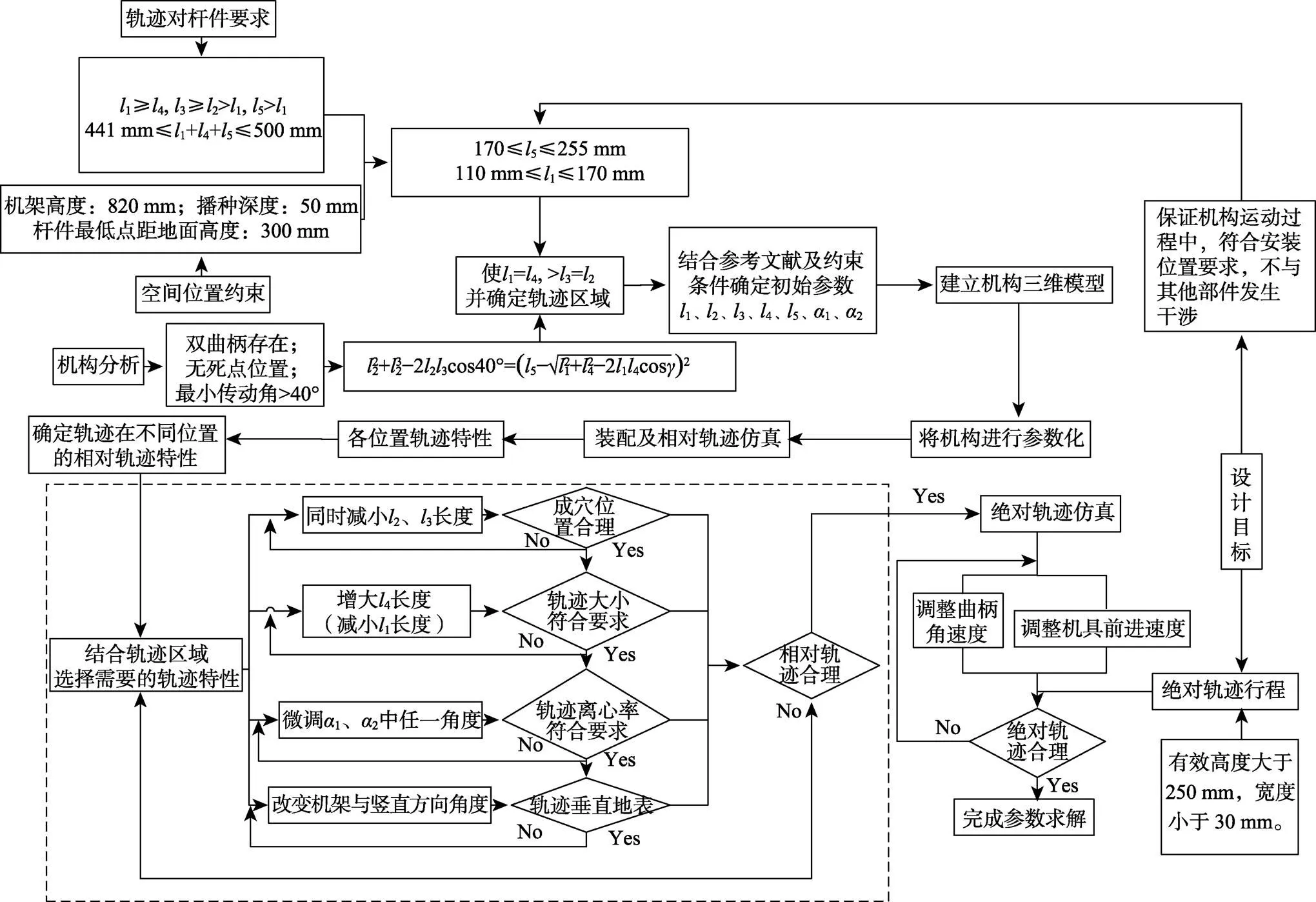
图8 五杆机构条件约束关系及参数求解流程
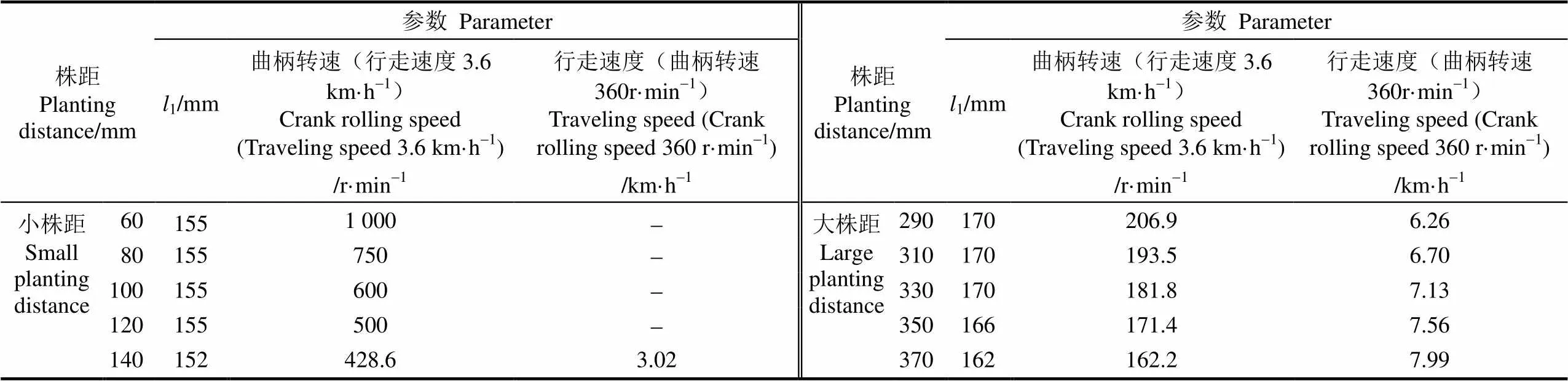
表2 对应不同株距的机构调整参数及作业参数表
注:小株距对应其他参数:2=150 mm,3=180 mm,4=130 mm,5=180 mm,1=-12°,2=0°,6=500 mm;大株距对应其他参数:2=150 mm,3=180 mm,4=153 mm,5=180 mm,1=-12°,2=0°,6=500 mm;“-”不满足行走速度要求。
Note: Small planting distance corresponding to the other parameters:2=150 mm,3=180 mm,4=130 mm,5=180 mm,1=-12°,2=0°,6=500 mm; Large planting distance corresponding to the other parameters:2=150 mm,3=180 mm,4=153 mm,5=180 mm,1=-12°,2=0°,6=500 mm; “-”did not meet the requirements of travel speed.

表3 对应不同株距机构有效作业轨迹参数
3 机构测试
3.1 试制装置
三维模型及试验样机如图9所示。其中虚线DF与连杆CD夹角3直接影响成穴器安装位置,故此处定义DF与连杆CD夹角3为成穴器安装角。
图9c为成穴器7具体结构,其中锥体均分为3块(其中一块进行透明化处理方便说明),锥体外表面设有滑道,内侧均有斜凹槽,可与成穴器套筒末端内表面固定滑块相配合,且与空心排种杆通过拉杆铰接,未投种时3块锥体处于成穴器套筒最下端,锥体封闭,成穴器工作时,在扎入土壤最底部时空心排种杆上升,同时拉杆拉动3块锥体分别沿着成穴器套筒末端内侧固定滑块相对成穴器套筒向上运动,锥体开启,完成投种。成穴器保持投种口打开状态直至完全从土壤及秸秆中拔出后关闭并进入下一循环,避免土块及秸秆夹在锥体块中。成穴器外套直径为30 mm,底部成穴锥角为33°。
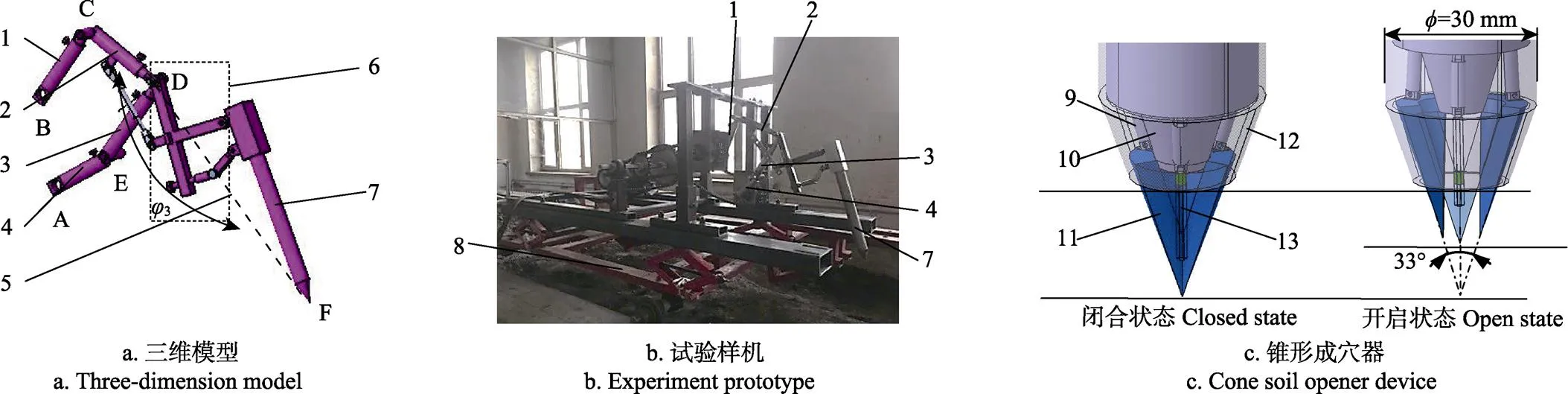
1. 曲柄BC 2. 连杆CD 3. 连杆DE 4. 曲柄AE 5. DF 6. 调整杆系7. 成穴器8. 行走台架9. 拉杆10. 空心排种杆11. 锥体块12. 成穴器套筒13. 滑道
3.2 仪器设备与方案
3.2.1 试验仪器设备
使用的仪器设备及参数设置:自制土槽;美国约克科技有限公司Phantomv5.1高速摄影机(帧速为1 000帧/s,曝光时间为823s,分辨率为:1 024×1 024 pixel);电脑;变频柜等。
3.2.2 测试方案
1)试验条件
为模拟田间秸秆覆盖,本试验采用玉米散秸秆,受试验条件限制秸秆覆盖长度为3 m,模拟田间情况粉碎秸秆,短秸秆(长度小于5 cm)与长秸秆(长度大于5 cm)量比为1:3。为检验极限状态时机构的作业能力,秸秆平均厚度为15 cm,最大厚度20 cm,覆盖量为3.3 kg/m2,(注:一般保护性耕作覆盖量最大为1.81 kg/m2。)为模拟秸秆残茬在田间遗留状态,秸秆采用部分平散铺在土层表面,部分扎入土层。
2)试验方法
将行走台架放置于土槽上方,并将试验样机固定在行走台架上,即样机可随行走台架同步向前运动,完成穿透秸秆及成穴工序。
首先调整机构的高度以确保成穴器穿透秸秆后可以形成深度为5 cm的穴孔,继而调整旋转电机转速,待机构运行平稳后开始行走作业。
高速摄像机拍摄五杆成穴机构相同株距不同成穴器安装角3时成穴器穿透秸秆进行打穴乃至移出秸秆的整个过程,对不同株距分别试验,并对各组试验成像图片进行观察分析。以成穴器最初扎入秸秆相对竖直面角度和其直至最底端相对竖直面的角度变化衡量穿透能力,角度变化范围越小穿透能力越好,以成穴器扎入秸秆直至最底端乃至移出秸秆整个过程中对秸秆的刮带、扰动和挑起现象判断扰动情况,越小越好。
3.3 影像分析
选取120 mm株距,成穴器安装角3为110°、134°、158°时试验截图,如图10所示,观察成穴器对秸秆的穿透能力和扰动情况。
当成穴器安装角3为110°时,如图10a,成穴器向内斜插入秸秆中,在此过程中,秸秆的扰动较小,成穴过程穿透秸秆能力较强,但成穴器在最低点时,由于从入土到出土角度的改变,使得成穴器在最低点对秸秆有扰动过程,且从最低点至离开秸秆过程中,将秸秆向前推动,且在离开秸秆表面时,将秸秆向外挑起,对秸秆的扰动较大;当安装角3为134º时,如图10b,成穴器稍向外斜插入秸秆中,在此过程中,对秸秆的穿透能力强,成穴器在最低点时,对秸秆扰动程度比110°时小,且从最低点至离开秸秆过程中,对秸秆的扰动较小,离开秸秆表面时,对秸秆的挑动程度小;当安装角3为158°时,如图10c,成穴器在五杆机构的带动下压入秸秆中,对秸秆穿透能力较差,离开秸秆时,由于是压入的方式进入秸秆中,故上行时无明显挑起秸秆现象。
在试验中,由于秸秆的作用及土壤的回落等情况,无法精确得到穴孔的状态,因此,根据图9a创建的三维模型,采用CATIA运动仿真模块,各杆件之间的运动副参见表1,模拟五杆成穴机构针对三种成穴器安装角分别在无秸秆覆盖情况工作时,所形成的穴口,各穴口截面如图11所示。
由图11可以得出,随着成穴器安装角3增大,穴口长度依次增大,其中,安装角3为158°时穴口斜度较小,无法保证种子落在最低点,不能保证播深的一致性。综合考虑在株距120 mm条件下,机构对应不同成穴器安装角时对秸秆的穿透情况、出土时对秸秆的扰动程度以及所成穴口的长度,角度为134°时的机构符合最佳成穴的要求。
通过以上方法获得在不同株距下满足五杆成穴机构最佳成穴要求的成穴器安装角,如表4所示。

表4 不同株距下五杆成穴机构最佳成穴器安装角
4 结 论
1)实现不对秸秆残茬进行任何处理的注射式免耕精密播种的基础条件是具有大竖直行程及幅宽可调的“门字形”轨迹成形机构。
2)轨迹区域定位结合数值循环比较可有效提高五杆机构参数化求解效率。针对不同作物进行工程应用时,机构设计参数及调整参数以上曲柄长度为主,下曲柄长度和成穴器安装角为辅进行。对应不同株距的结构调整参数与作业参数组合,可形成251.2~344.7 mm范围内竖直方向的有效作业轨迹。
3)对于不同株距的作业要求,可通过调整成穴器安装角度进行适应,其对应关系为:株距60、80、100、120、140、290、310、330、350、370 mm,安装角分别为128°、128°、134°、134°、134°、128°、128°、128°、128°、122°。
[1] 高焕文,何明,尚书旗,等. 保护性耕作高产高效体系[J].农业机械学报,2013,44(6):35-38. Gao Huanwen, He Ming, Shang Shuqi, et al. High yield and benefit system for conservation tillage[J]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(6): 35-38. (in Chinese with English abstract)
[2] Sullivan D G, Truman C C, Schomberg H H, et al. Potential impact of conservation tillage on conserving water resources in Georgia[J]. Journal of Soil and Water Conservation. 2007, 62(3): 145-152.
[3] Ralph P. Analyzing future farming practices today[C]. Proceedings of 2004 Western States Conservation Tillage Conference, University of California, USA, 2004.
[4] Soza E, Botta G, Tourn M, et al. Direct corn seeding. Effects of residue clearance on implant efficiency[J]. Spanish Journal of Agricultural Research, 2003, 1(3): 99-103.
[5] 王汉羊,陈海涛,纪文义. 2BMFJ-3型麦茬地免耕精播机防堵装置[J]. 农业机械学报,2013,44(4):64-70. Wang Hanyang, Chen Haitao, Ji Wenyi. Anti-blocking mechanism of type 2BMFJ-3 no-till precision planter for wheat stubble fields[J]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(4): 64-70. (in Chinese with English abstract)
[6] 王汉羊,陈海涛,纪文义. 2BMFJ-3(B)型茬地大豆免耕覆秸精播机性能试验研究[J]. 大豆科技,2012(2):43-46. Wang Hanyang, Chen Haitao, Ji Wenyi. Performance test on 2BMFJ-3(B) no-tillage soybean precision seeder in stubble field[J]. Soybean Science and Technology, 2012(2): 43-46. (in Chinese with English abstract)
[7] 张晋国,高焕文. 免耕播种机新型防堵装置的研究[J]. 农业机械学报,2000,31(4):33-35. Zhang Jinguo, Gao Huanwen. Study on the strip chopping anti-blocking mechanism[J]. Transactions of the Chinese Society for Agricultural Machinery, 2000, 31(4): 33-35.(in Chinese with English abstract)
[8] 王金武,刘亚华,王金峰,等. 全椭圆齿轮行星系液态肥深施机构优化设计与试验[J]. 农业机械学报,2002,43(10):60-65. Wang Jinwu, Liu Yahua, Wang Jinfeng, et al. Optimization design and experiment of liquid-fertilizer applying deep- fertilization mechanism for planetary elliptic gears[J]. Transactions of the Chinese Society for Agricultural Machinery, 2002, 43(10): 60-65. (in Chinese with English abstract)
[9] 张继钊. 基于秧针静轨迹的旋转式分插机构逆向求解[D]. 杭州:浙江理工大学,2013. Zhang Jizhao. Reverse Calculation of Rotary Transplanting Mechanism Based on the Seeding Needle Tip Point’s Displacement[D]. Hangzhou: Zhejiang Science and Technology University, 2003. (in Chinese with English abstract)
[10] 陈建能,王英,张翔,等. 基于共轭凸轮的强制推秧机构反求设计[J]. 农业工程学报,2011,27(3):98-102. Chen Jianneng, Wang Ying, Zhang Xiang, et al. Reverse design of compulsory seedling-pushing mechanism based on conjugate cam[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2011, 27(3): 98-102. (in Chinese with English abstract)
[11] 王金武,潘振伟,周文琪,等. SYJ-2型液肥变量施肥机设计与试验[J]. 农业机械学报,2015,46(7):53-58. Wang Jinwu, Pan Zhenwei, Zhou Wenqi, et al. Design and test of SYJ-2 type liquid variable fertilizer[J]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(7): 53-58. (in Chinese with English abstract)
[12] 郗晓焕,王金武,郎春玲,等. 液态施肥机椭圆齿轮扎穴机构优化设计与仿真[J]. 农业机械学报,2011,42(2): 80-83. Xi Xiaohuan, Wang Jinwu, Lang Chunling, et al. Optimal design and simulation on pricking hole mechanism of liquid fertilizer applicator[J]. Transactions of the Chinese Society for Agricultural Machinery, 2011, 42(2): 80-83. (in Chinese with English abstract)
[13] 马旭,马成林,张守勤. 地膜覆盖播种机成穴器的研究[J]. 农业机械学报,1989,20(4):20-27. Ma Xu, Ma Chenglin, Zhang Shouqin. The study on accumulative drop unit of film mulch planter[J]. Transactions of the Chinese Society for Agricultural Machinery, 1989, 20(4): 20-27. (in Chinese with English abstract)
[14] 马成林,李成华,于海业. 打穴播种机结构参数和工作参数的优化设计[J]. 农业机械学报,1999,30(3):30-34. Ma Chenglin, Li Chenghua, Yu Haiye. Optimal design of parameters for spade punch planter of maize[J]. Transactions of the Chinese Society for Agricultural Machinery, 1999, 30(3): 30-34. (in Chinese with English abstract)
[15] 马成林,李成华,于海业,等. 铲式成穴器成穴性能的试验研究[J]. 农业机械学报,1999,30(2):33-37. Ma Chenglin, Li Chenghua, Yu Haiye, et al. An experimental study on the influence of parameters of spade soil opener on working quality[J]. Transactions of the Chinese Society for Agricultural Machinery, 1999, 30(2): 33-37. (in Chinese with English abstract)
[16] 郑超,杜瑞成,蔡善儒,等. 直插式免耕穴播机的设计[J].农机化研究,2011,33(6):77-79. Zheng Chao, Du Ruicheng, Cai Shanru, et al. Design on No-tillage hill seeder with vertical dropping[J].Journal of Agricultural Mechanization Research. 2011, 33(6): 77-79. (in Chinese with English abstract)
[17] 陈晓光,左春柽,高峰. 直插式播种机的研究[J]. 农业工程学报,1993,9(3):66-70. Chen Xiaoguang, Zuo Chuncheng, Gao Feng. Study on the direct insert planter[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 1993, 9(3): 66-70. (in Chinese with English abstract)
[18] 孙桓,陈作模,葛文杰. 机械原理:第7版[M]. 北京:高等教育出版社,2011:109-143.
[19] 马良,石宁. 齿轮-五杆组合机构运动学特征仿真分析[J]. 西安科技大学学报,2013,33(6):727-730. Ma Liang, Shi Ning. Gear-5-bar combination mechanism’s kinematics characteristic simulation[J]. Journal of Xi’an University of Science and Technology, 2013, 33(6): 727-730. (in Chinese with English abstract)
[20] 方芳. 齿轮五杆机构轨迹曲线生成系统的研制[J]. 机械制造与研究. 2006,35(1):59-61. Fang Fang. System of path generator for gear five-bar mechanism[J]. Machinery manufacturing and research. 2006, 35(1): 59-61. (in Chinese with English abstract)
[21] 陶军,张蕊,刘迟. 齿轮五杆机构实现预定轨迹设计方法研究[J]. 科技创新导报. 2014,11(19):29-31. Tao Jun, Zhang Rui, Liu Chi. Study on the method of realizing preconceived track by geared five-bar mechanism [J]. Science and Technology Innovation Herald, 2014, 11(19): 29-31. (in Chinese with English abstract)
[22] 李学刚,黄永强,冯丽艳. 平面五杆机构双曲柄存在的充要条件研究[J]. 机械科学与技术,2005,24(1):51-53. Li Xuegang, Huang Yongqiang, Feng Liyan. Study of the sufficient and necessary conditions for existence of double crank of planar five-bar mechanism[J]. Mechanical Science and Technology, 2005, 24(1): 51-53. (in Chinese with English abstract)
[23] 李团结,曹惟庆,褚金奎. 齿轮-五杆机构轨迹综合的连续法[J]. 西安理工大学学报,1999,15(14):76-79. Li Tuanjie, Cao Weiqing, Chu Jinkui. Synthesis of path generation of the geared five-bar mechanism by continuation method[J]. Journal of Xi’ an University of Technology, 1999, 15(14): 76-79. (in Chinese with English abstract)
[24] Primrose E J F, Freudenstein F. Geared five-bar motion, part 2-arbitrary commensurate gear ratio minus[J]. Journal of Applied Mechanics, Trans of the ASME, 1963, 30(2): 170-175.
[25] Yu H, Yuan Z, Glimartin M J, et al. Modelling and control of a slider hybrid seven-bar system[C]. International Association of Science and Technology for Development (IASTED) International Conference on Robotice and Applications, Santa Barbara CA, USA, 319-323, October 28-30, 1999.
[26] H Yu. Modelling and control of hybrid machine systems: A five-bar mechanism case[J]. International Journal of Automation and Computing, 2006(3): 235-243.
[27] Smaili A A, Diab N A, Atallah N A. Optimum synthesis of mechanisms using tabu-gradient search algorithm[J]. ASME Journal of Mechanical Design, 2005, 127(5): 917-923.
[28] 中国农业机械化科学研究院. 农业机械设计手册:上册[M]. 北京:中国农业科学技术出版社,2007:321.
[29] 王汉羊. 2BMFJ-3麦茬地免耕覆秸大豆精密播种机的研究[D]. 哈尔滨:东北农业大学,2013. Wang Hanyang. Study on 2BMFJ-3 Type No-till Soybean Precision Planter With Straw-covering in Wheat Stubble Fields[D]. Harbin: Northeast Agricultural University, 2013. (in Chinese with English abstract)
[30] Lu Zhen, Wang Tianyou, Li Xincai, et al. Parametric design of the tangential intake port in diesel engines[J]. Proceedings of the Institution of Mechanical Engineers, 2013, 227(3): 342.
[31] 刘宏新,徐高伟,孟永超. CATIA三维设计基础与应用[M]. 北京:机械工业出版社,2014.
[32] 刘宏新,宋微微. CATIA数字样机运动仿真详解:第2版[M]. 北京:机械工业出版社,2013.
[33] 梁崇高,阮平生. 连杆机构的计算机辅助设计[M]. 北京:机械工业出版社,1986.
[34] 褚金奎,孙建伟. 连杆机构尺度综合的谐波特征参数法[M]. 北京:科学出版社,2010.
[35] 李学荣,应瑞森,传俊发.连杆曲线图谱[M]. 重庆:重庆出版社,1993:39.
Analysis and parameter solution of injection type no-till seeding into hole trajectory based on five-bar mechanism
Liu Hongxin, Wang Pan, Gai Guangwei, Xiang Binbin
(150030)
No-tillage seeder mainly uses the 2 ways of cutting and removing the straw to ensure seeding smoothly by now, and thus there are many problems: Higher power, environment pollution, twining and blocking of straw, and so on. To this end, a mechanism based on the special trajectory requirements was developed to enable the soil opener to penetrate into the surface without any treatment of the surface covering, which could lay substantial foundation for the implementation of injection-free no-tillage planting pattern. First of all, the analysis of mechanism aimed at the special trajectory was carried out and the five-bar mechanism was confirmed as the formation mechanism of trajectory. Moreover, the mathematical model of five-bar mechanism was set up, and the basic existence conditions and spatial constraints of double-crank and uniform five-bar mechanism were analyzed on the basis of the model. Given the feasible region of relative trajectory of the cavitation endpoint, and combined with the mechanical design module and knowledge engineering module of CATIA (computer aided three-dimensional interactive application) software, the parametric model was set up, the movement was simulated and the trajectory for five-bar mechanism was drawn. Subsequently, the distribution characteristics of region trajectory of cavitation endpoint were researched by the method of region localization of trajectory; the influence of the parameters on the trajectory was researched by the method of numerical cycle and comparison, and combined with the constrain conditions, the combination of structural parameters and operation parameters was obtained corresponding to different distance; on the above condition, the effective operation trajectory at the vertical direction changed from 251.2 to 344.7 mm. In May, 2016, the experiments were carried out with the prototype in the Soil Laboratory of the College of Engineering, Northeast Agricultural University. The conditions were set as follows: The length of mulching straw was 3 m and the average thickness of straw was 15 cm. In order to simulate the actual working condition in the field, the straw was scattered on the soil surface, and part of straw was stuck in the soil layer. The whole process that the soil opener device perforated through the straw until the straw was removed completely was shot by high-speed camera with the same planting spacing under different setting angle of soil opener of five-bar mechanism; the experiments were also conducted on different plant spacing respectively, and then the experimental images were observed and analyzed. Combined with the motion simulation of CATIA, the soil opener setting angle of five-bar cavitation mechanism was obtained, which could meet the requirement for the best hole-forming points. The angles were 128°, 128°, 134°, 134°, 134°, 128°, 128°, 128°, 128°and 122°respectively corresponding to the spacing of 60, 80, 100, 120, 140, 290, 310, 330, 350, and 370 mm. Research showed that the formation mechanism of trajectory in the process of no-tillage seeding based on the five-bar mechanism could drive cavitation device to complete the operation under the condition of straw returning drastically, and perforate through the straw effectively and form cavitation as required, with fewer scraping phenomena. It is confirmed that the region localization of trajectory can improve the solution efficiency of parameters combination of the five-bar mechanism, and also provide the effective method of solving the parameters of five-bar mechanism according to the ratio of long axis to short axis of similar ellipse trajectory.
agriculture equipment; agricultural machinery; seeding; no-tillage seeding; injection type; five-bar mechanism; trajectory region localization; numerical cycle comparison
10.11975/j.issn.1002-6819.2017.08.003
S223.2+3
A
1002-6819(2017)-08-0021-09
2016-08-01
2017-03-02
国家自然科学基金项目(51275086);公益性行业科研专项(201303011)。
刘宏新,男,教授,博士生导师,研究方向为农业机械化技术与装备、数字化设计与数字资源管理、车辆工程。哈尔滨 东北农业大学工程学院,150030。Email:Lcc98@neau.edu.cn
刘宏新,王 盼,改广伟,相斌斌.基于五杆机构的注射式免耕播种成穴轨迹分析与参数求解[J]. 农业工程学报,2017,33(8):21-29. doi:10.11975/j.issn.1002-6819.2017.08.003 http://www.tcsae.org
Liu Hongxin, Wang Pan, Gai Guangwei, Xiang Binbin. Analysis and parameter solution of injection type no-till seeding into hole trajectory based on five-bar mechanism[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(8): 21-29. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2017.08.003 http://www.tcsae.org
