待测信号线性驱动Duffing振子弱信号检测系统
2017-05-19马松山丁家峰
卢 明,马松山,2,丁家峰,黄 伟,袁 洪
待测信号线性驱动Duffing振子弱信号检测系统
卢 明1,马松山1,2,丁家峰1,黄 伟3,袁 洪3
(1.中南大学物理与电子学院,湖南长沙,410083;2.中南大学先进材料超微结构与超快过程研究所,湖南长沙,410083;3.中南大学湘雅三医院,湖南长沙,410013)
针对周期驱动的Duffing振子微弱信号检测系统存在临界阈值影响信号检测精度和对待检测信号频率分辨率不高的问题,提出一种以待检测信号为驱动力的Duffing振子线性驱动弱信号检测系统。该系统以待测信号作为系统线性驱动信号,利用系统线性驱动参数的微小变化会导致系统输出状态发生改变的特性,对淹没在背景噪声中的弱信号进行检测。同时,通过计算系统的梅尔尼科夫函数和最大李氏指数,并结合系统相轨迹状态的变化,对该系统检测信号的可行性进行分析。研究结果表明:该检测系统大大提高了对微弱信号频率的分辨能力;检测精度可达10−4,即谐波信号频率与驱动力频率之间的相对偏差ω-ω1/ω达10−4时依然可以检测;增强系统对噪声有免疫能力,同时可消除临界阈值对系统检测精度的影响,提高系统检测效率。
Duffing振子;混沌;微弱信号检测;频率
混沌理论在弱信号检测领域具有广阔的应用前景,从而使其成为非线性科学中研究热点,许多学者对其基本特点和实际应用进行了研究[1−5]。目前,利用混沌理论对信号的检测主要体现在微弱信号的检测方面,而基于Duffing混沌振子实现微弱信号的检测是最典型的检测系统[6−9]。由于Duffing混沌振子对信号初始值具有很强的敏感性,同时对噪声具有很强免疫性,通过观察体系相轨迹状态的变化,即可实现微弱信号的检测[10−11]。如范剑等[12]采用周期信号驱动的方式实现对Duffing状态变化的控制,研究了Duffing振子检测性能;WANG等[13]则研究了Duffing振子在强噪声背景中进行信号检测的基本原理及其可行性;李月等[14]研究了在噪声背景下不同微弱方波信号激励的Duffing振子检测性能;邓宏贵等[15]研究了采用小波去噪信号作为驱动力的改进型Duffing振子弱信号检测方法,克服了对混沌临界状态与周期态区别的模糊性。这些针对Duffing系统微弱信号检测的研究大都采用周期驱动的Duffing振子微弱信号检测系统,而周期驱动信号检测系统存在以下问题:1)该检测系统由于混沌临界阈值存在,检测效率不高;2)该检测系统的频率分辨率不高,只有0.03[16],当谐波噪声频率与驱动力频率之间的相对偏差大于0.03时,系统无法免疫此类谐波噪声,从而降低系统检测精度。为此,本文作者提出一种以待测信号为驱动力,通过线性扰动方式来控制Duffing系统的状态变化而实现弱信号检测的Duffing振子弱信号检测方法。在该方法中,用线性驱动的方式使Duffing系统状态的变化得到更精确控制,通过设置新的系统测量参数,提高系统对噪声的免疫程度,进一步改善系统检测性能,消除临界阈值对检测系统影响。同时,对该检测系统在不同频率与幅值下的最大李雅普诺夫指数进行分析,并利用梅尔尼科夫函数分析系统状态,研究系统相轨迹变化规律和系统的检测性能。
1 线性驱动Duffing振子弱信号检测模型
在周期驱动下,Duffing振子弱信号检测模型可表示为[17−18]

其中:k为阻尼系数;-x+ x3为非线性恢复力;γcos(ωt)为周期驱动信号项;γ为驱动信号幅值;ω为驱动信号频率;Acos(ω1t)为待检测信号项;A为待测信号幅值;ω1为待测信号频率;n( t)为背景噪声项。式(1)对应的状态方程为

由(2)式可知:当0=γ时,系统的相平面为3个奇点,分别为鞍点(0,0),焦点(1,0)和(−1,0),且初始状态不同,将导致点),(xx˙最终停在2个焦点之一。当γ较小时,系统的相轨迹表现为Poincare映射意义下的吸引子,相点将围绕1个焦点或者另外1个焦点作周期运动。随着γ增大,系统非线性部分影响增大,系统将进入同宿轨道状态,如图1(a)所示;进一步增大γ,系统将进入混沌状态,如图1(b)所示;但当γ增大到超过临界阈值dγ时,系统非线性部分影响开始减弱,线性振子影响加强,系统将进入大周期状态,如图1(c)所示。
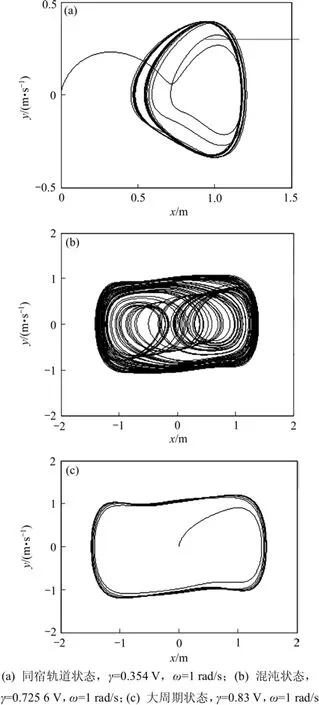
图1 系统相轨迹状态和时域状态图Fig.1 System trajectory state and time domain state
在进行信号检测时,需将检测系统设置为混沌临界状态。根据梅尔尼科夫指数[19],周期信号驱动的混沌临界阈值为由此可得周期信号驱动的混沌系统临界阈值随驱动信号频率变化关系如图2所示。由图2可知:对于周期信号驱动的混沌系统来说,不同的驱动信号频率对应不同的混沌系统临界阈值,因此,当检测不同频率的信号时,需重新设置系统临界阈值,这极大地降低了信号的检测效率;另一方面,该检测系统的频率分辨力低于0.03,即ω-ω1/ω>0.03,当谐波噪声频率与驱动力频率之间的相对偏差大于0.03时,系统无法免疫此谐波噪声,从而降低系统检测精度。
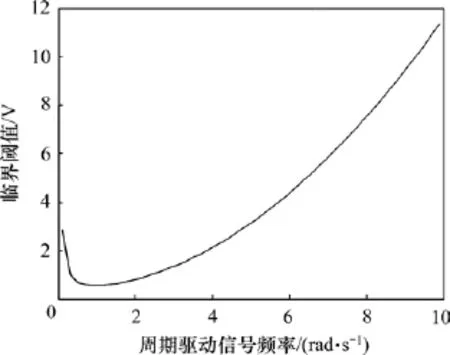
图2 周期信号驱动Duffing系统临界阈值与驱动信号频率关系Fig.2 Relationship betw een chaos threshold of periodic driving force signalsand frequency
可见:对周期信号驱动的Duffing振子系统进行信号检测时,系统对待检测信号频率敏感程度最低只能达到10−2[16],且存在临界阈值影响。因此,为提高对微弱信号频率检测的精度,根据混沌控制理论,构建基于待测信号线性驱动的Duffing混沌振子检测系统,其Duffing方程可表示为

其中:β-Acos(ω1t )为输入系统的待检测信号项;ω1为待测信号频率,其状态方程为

为研究待测信号线性驱动Duffing振子弱信号检测方法的可行性,利用梅尔尼科夫函数和不同频率与幅值下的最大李雅普诺夫指数对其检测原理进行分析。
2 线性驱动Du ffing振子弱信号检测可行性分析
利用Duffing振子检测信号时,系统能否在驱动信号影响下由混沌状态进入大周期状态是系统能否完成信号检测的关键,由于梅尔尼科夫(Melnikov)通常用来区分系统是否进入混沌状态,因此,利用梅尔尼科夫(Melnikov)对线性驱动的Duffing振子检测系统状态进行分析。当系统未受到扰动时,式(4)可以表示为Ham ilton系统:

该系统的Hamilton常量可表示为

由式(5)可得系统的2个Hamilton轨道常量:

其中:0()x t和0()y t是系统2条同宿轨道的坐标参量,利用式(7)可求得系统的梅尔尼科夫函数,由此可知系统Melnikov函数为
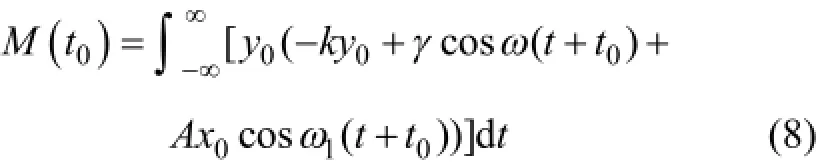
将式(7)代入式(8),可得

根据Melnikov函数,若系统能进入混沌状态,则式(9)将存在零解,也就是说,与式(3)相应的Poincare映射中,稳定不变行流与不稳定不变形流必然相交,即此时出现横截同宿点,系统进入混沌状态。因此,只需选择合适的系统参数,线性驱动的Duffing振子能进入混沌状态。
梅尔尼科夫函数存在零解只是系统进入混沌状态的必要条件,因此,通过对该系统进行数据仿真,分析其最大李雅普诺夫指数,并结合系统梅尔尼科夫指数进一步分析系统所处状态,判断系统是否能在混沌状态和大周期状态之间转换。
应当指出的是:只要式(9)有零解,Duffing振子微弱信号检测系统即处于混沌状态,因此,参量k和β等可以取不同值。为使问题简化,设定系统参数为:k=0.5,1=β,3.0=γV,A=0.2V,ω=1 rad/s,并通过数值计算得到系统最大李雅普诺夫指数随待测信号频率之间的关系,如图3所示。从图3可见:只有当输入待检测信号的频率ω1=ω或ω1=3ω时,系统的最大李氏指数小于0,分别为−0.004 97和−0.003 16,表明系统处于周期状态。而当待检测信号频率为其他值时,系统最大李氏指数都大于0,系统仍处于混沌状态。因此,随着待测信信号频率变化,系统可以实现混沌状态与周期状态转变。
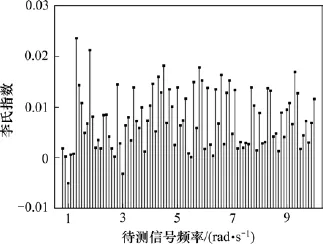
图3 系统最大李氏指数与待检测信号频率关系Fig.3 Relationship between the largest Lyapunov index and themeasured signal frequency
为进一步研究系统对待测信号频率的分辨精度,通过数值计算ω1=ω,ω1=1.000 1ω及ω1=0.999 9ω时系统的Melnikov函数,如图4所示。从图4(a)可知:当待测信号的频率ω1=ω时,系统的Melnikov函数介于−2.0与−0.5之间,全部小于0,因此,式(9)不存在零解,说明系统此时已经进入周期状态。而从图4(b)和图4(c)可知:当待检测信号频率分别取ω1=1.000 1ω和ω1=0.999 9ω时,系统的Melnikov函数介于−1.5与0.2之间,出现多个大于0的情况,式(9)存在多个零解,说明此时系统处于混沌状态。
可见:通过待测信号线性驱动的方式可以实现系统由混沌状态向大周期状态转变。因而在进行信号检测时,只需将待检测信号输入Duffing振子检测系统,通过调节信号频率,当系统周期驱动力信号频率ω与待检测信号频率ω1保持严格一致时,系统相轨迹状态
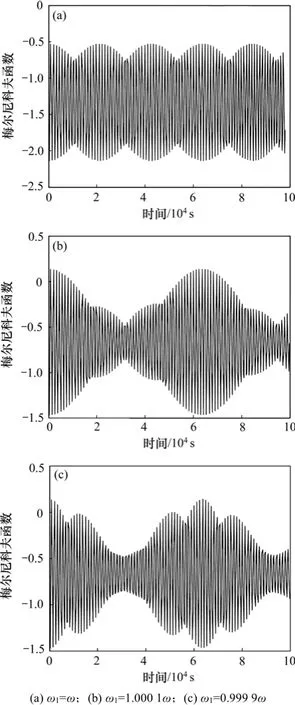
图4 不同待测信号频率下系统梅尔尼科夫函数值Fig.4 ValueofMelnikov function for different frequenciesof signals
将由混沌状态进入大周期状态,从而可完成信号检测。
3 线性驱动Du ffing振子微弱信号检测系统性能分析
由检测原理可知,待测信号线性驱动Duffing振子系统具备弱信号检测能力,下面进一步分析其检测性能。考虑到噪声的影响,此时Duffing振子方程可表示为

其中:()n t为高斯白噪声信号项。
3.1 系统初始状态对检测效率的影响
从图1可见:对于周期信号驱动的Duffing振子微弱信号检测系统,系统从混沌状态进入大尺度周期状态时其相图变化非常明显,因此,该系统进行信号检测时,必须将系统调整至混沌临界状态,也就是说,在周期信号驱动的Duffing振子微弱信号检测系统中,待检测信号的“混沌抑制力”必须在系统临界状态时才能体现。然而,目前混沌临界阈值的确定主要通过观察相位状态的改变进行确定,因此,无法精确地对混沌临界阈值进行确定,且由图2可知,当系统驱动信号频率不同时,系统临界阈值亦不相同,这极大地降低了信号检测效率。
利用待检测信号线性驱动的Duffing振子微弱信号检测系统进行信号检测时,通过适当的系统参数设置,使系统处于混沌状态。如前所述,取k=0.5,β=−1, γ=0.3V,ω=1 rad/s,此时系统处于混沌状态,如图5(a)所示。增大系统周期信号的幅值,如取γ=0.5V,此时系统状态仍为混沌状态,如图5(b)所示。但在系统周期信号幅值保持不变即同样取γ=0.3V时,一旦待检测信号输入检测系统,系统由混沌状态立即进入大周期状态,如图5(c)所示。通过进一步计算得到此时系统的最大李亚普若夫指数与待测信号幅值的关系,如图5(d)所示。可知:当输入系统的待检测信号幅值逐渐增大时,系统的最大李雅普诺夫指数亦呈增大趋势,但其值小于0,表明系统处于大周期状态。也就是说,当输入系统的待测信号幅值在较大范围内变化时,系统依然能保持大周期状态,可见在待检测信号自驱动的Duffing振子混沌检测系统中待检测信号具有较强的“混沌抑制力”。因此,在实际检测时,无需将系统调整至混沌临界状态,消除临界阈值对检测系统的影响,从而极大改善系统检测性能,提高系统信号检测能力。
3.2 检测系统对噪声“免疫”能力分析
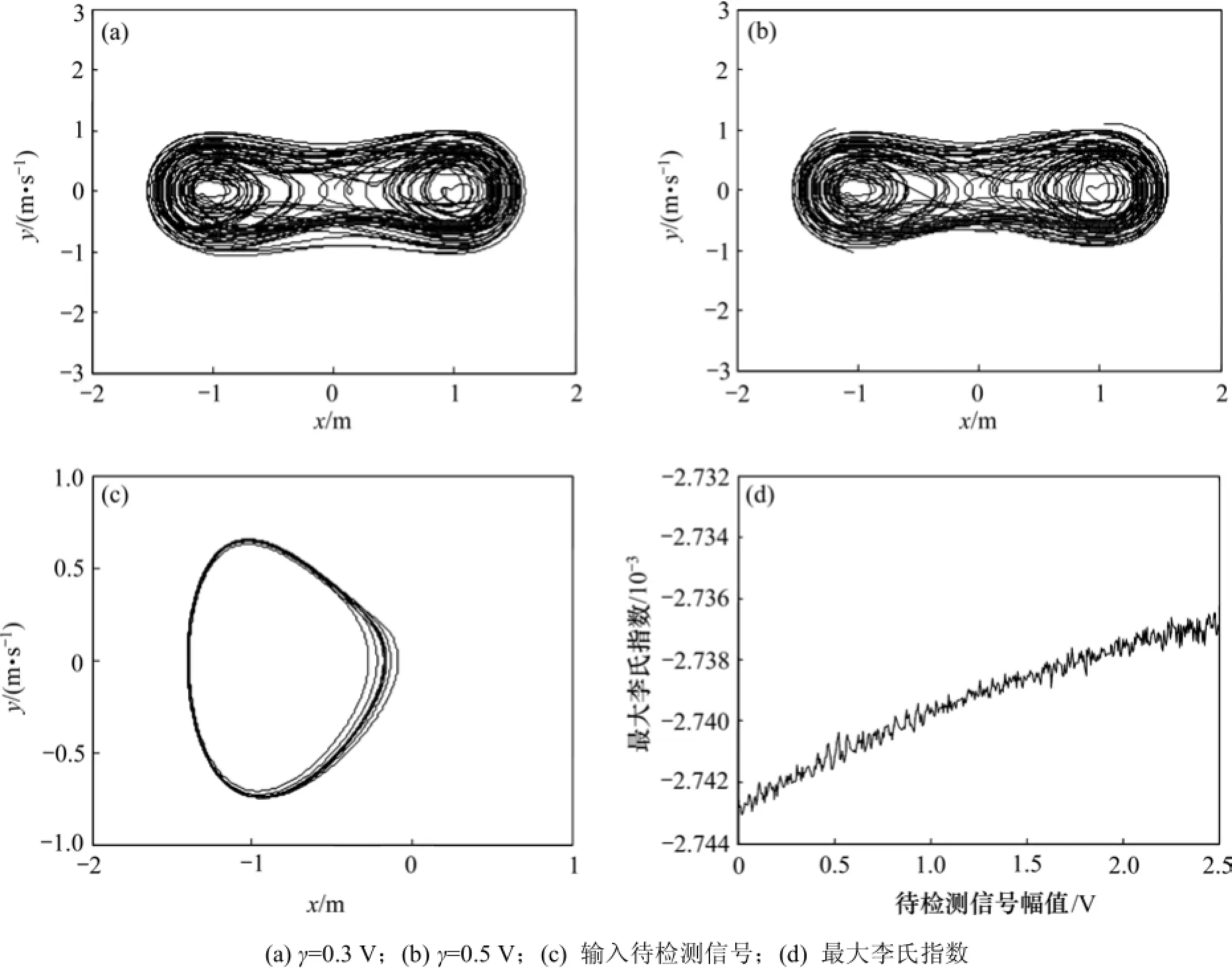
图5 线性驱动Duffing系统的相轨迹Fig.5 Phase trajectoriesof linear drive Duffing system
对周期信号驱动的Du ffing系统进行信号检测时,周期扰动信号与待检测信号频率的偏差应小于0.03[16],即当待测信号频率与周期扰动信号频率的相对偏差小于0.03时,系统将由混沌状态进入大周期状态,从而完成信号检测。但在信号检测过程中,待测信号通常淹没于系统噪声和环境噪声中,当噪声频率也与周期驱动信号频率的偏差小于0.03时,系统无法分辨噪声和待检测信号,从而对检测结果造成影响,产生检测误差。然而,对于待测信号线性驱动的Duffing振子信号检测系统而言,当输入系统的待检测信号与系统频率保持一致时,由图4(a)可知,系统处于大周期状态;但当待检测信号频率与系统频率的偏差为0.000 1时(如图4(b)和4(c)所示),系统即可转变为混沌状态。可见:待测信号线性驱动的Duffing振子信号检测系统的频率分辨力可达0.000 1,这极大地提高了检测系统的频率分辨能力,检测精度可达10−4数量级,即谐波信号频率与驱动信号频率之间的相对偏差ω-ω1/ω达10−4时依然可以进行检测,从而有效地排除了谐波噪声对检测系统性能的影响。由此可知:线性扰动Duffing振子对噪声具有更强的区分能力,能进一步提高信号检测能力。在线性驱动的Duffing振子弱信号检测系统中,该信号检测系统拥有较强的频率分辨能力和混沌抑制力,但利用该系统进行信号检测时,对待检测信号频率精确度要求较高,且必须对信号频率进行处理,这对系统检测效率存在较大影响。
4 系统仿真结果与分析
4.1 系统仿真模型
为进一步检测线性驱动Duffing振子系统的检测性能,对其进行Matlab/Simulink仿真,仿真模型如图6所示。设系统参数k=0.5,β=−1,γ=0.3V,ω=1 rad/s,通过仿真,可获得不同信号频率下系统的检测结果,如表1所示。从表1可知:线性驱动Duffing弱信号检测系统能有效完成信号频率的检测,提高频率检测分辨率,如当待检测信号频率为0.800 0 rad/s时,普通方法检测结果为0.765 6 rad/s,相对误差达4.3%,而采用待测信号线性驱动Duffing振子检测系统进行检测时,检测结果为0.800 3 rad/s,相对误差为0.003 7%,可知系统扰动系统具有更高的频率分辨力。
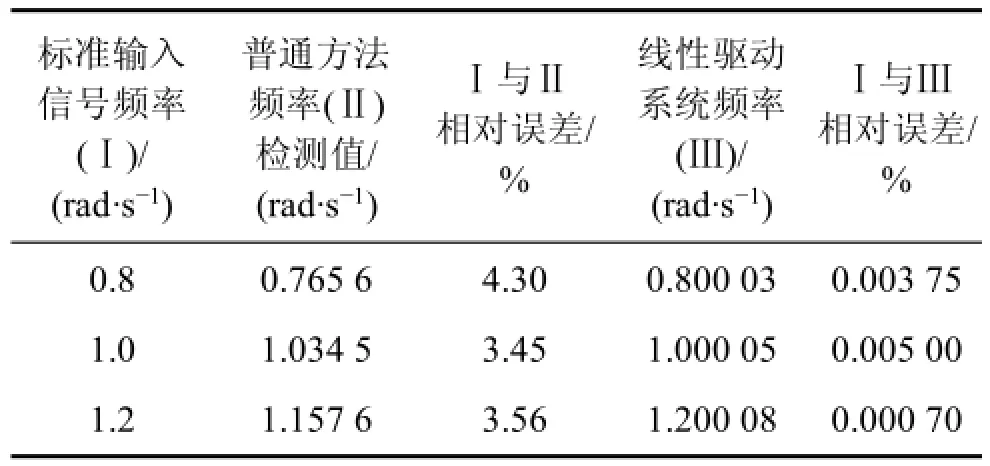
表1 不同频率下系统检测结果Table1 Detection resultsunder different frequencies
进一步研究待测信号线性驱动Duffing弱信号检测系统对待测信号幅值检测性能的影响,仿真结果如表2所示。从表2可知:当信噪比相同时,待检测信号幅值越大,检测时相对误差越小,如当信噪比为−20 dB,待测信号理论幅值为0.01m V时,系统检测到的幅值相对误为4.7%,但当待测信号理论幅值为0.1m V时,系统检测到的幅值相对误差为3.9%。同时,输入系统的待检测信号信噪比越大,系统幅值检测的相对误差越小。可见,待测信号线性驱动Duffing振子检测系统能有效完成对弱信号的检测。

图6 系统仿真模型Fig.6 Simulationmodelof the system
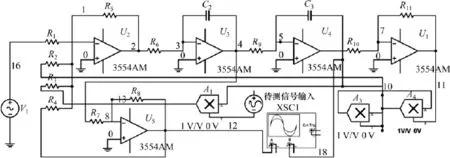
图7 系统仿真电路图Fig.7 Simulation circuitof system

表2 线性驱动系统幅值检测结果Table2 Am plitude detection resultsof system
4.2 系统仿真电路设计
利用Multisim软件进一步对待检测信号线性驱动的Duffing振子弱信号检测系统的电路进行设计。在系统参数设定为k=0.5,β=−1的情况下,式(4)可改写为

与(11)式对应的电路状态方程为
根据式(12),可得到其电路图,如图7所示。在此电路中,选定电阻R3=2R1=2R2,C1=C2。利用该仿真电路,可先将电路调制在混沌状态,然后将待检测信号加入检测系统,可以发现系统将由混沌状态进入周期状态,证明该仿真电路系统能很好地实现弱信号检测。
5 结论
1)提出了待测信号线性驱动Duffing振子微弱信号检测系统。系统的梅尔尼科夫函数和最大李雅普诺夫指数及仿真结果表明待测信号线性驱动Duffing振子微弱信号检测系统能很好地实现弱信号的检测。
2)待测信号线性驱动Duffing振子微弱信号检测系统能大大提高系统对待检测信号的频率分辨力,其频率检测精度可达10−4,从而提升系统噪声免疫能力。
3)待测信号线性驱动Duffing振子微弱信号检测系统能有效地消除在周期信号驱动Duffing振子检测系统中的临界阈值的影响,提高系统检测效率,实现较强噪声背景下的微弱周期信号检测。
[1]DENG Xiaoying,LIU Haibo,LONG Teng.A new complex Duffing oscillator used in complex signal detection[J].Chin Sci Bull,2012,57(17):2185−2191.
[2]RASHTCHI V,NOURAZAR M.A multiprocessor ions II imp lementation of Duffing oscillator array for weak signal detection[J].Journal of Circuits Systems and Computers,2014, 23(4):1450054.
[3]CHANG Yuan,HAO Yi,LI Chunwen.Phase dependent and independent frequency identification of weak signals based on Duffing oscillator via particle swarm optim ization[J].Circuits Systems And Signal Processing,2014(1):223−239.
[4]胡方静.用于金属探测的混沌振子系统研究[D].济南:山东大学电气工程学院,2012:20−43.
HU Fangjing.Study of chaotic oscillator formetal detection[D]. Jinan:Shandong University.School of Electrical Engineering, 2012:20−43.
[5]魏恒东.混沌直扩信号检测与混沌同步研究[D].成都:电子科技大学电子工程学院,2010:4−32.
WEI Hengdong.A study on the detection of chaotic direct sequence spread spectrum signal and chaos synchronization[D]. Chengdu:School of Electronic Engineering,University of Electronic Science and Technology of China,2010:4−32.
[6]RASHTCHIV.Detecting the state of the Duffing oscillator by phase space trajectory auto-correlation[J].International Journal of Bifurcation and Chaos,2013,23(4):1350065.
[7]RASHTCHI V,NOURAZAR M,AGHMASHEH R.Fault diagnosis of broken bars in squirrel cage inductionmotors using Duffing oscillators[J].International Review of Electrical Engineering,2012,7(3):4457−4468.
[8]JIN Tian,ZHANG Hua.Statistical approach to weak signal detection and estimation using Duffing chaotic oscillators[J]. ScienceChina:Information Sciences,2011,54(11):2324−2337.
[9]蒋芳芳.体震信息监测系统中的微弱信号检测与分析方法研究[D].沈阳:东北大学信息科学与工程学院,2011:42−55.
JIANG Fangfang.Research on weak signal detection and analysis approach in the ballistocardiogram information Monitoring system[D].Shenyang:Northeastern University. Collegeof Information Science and Engineering,2011:42−55.
[10]汪金山,汪晓东,施晓钟.基于Duffing混沌系统微弱信号检测的数值分析[J].仪器仪表学报,2005,26(8):33−34.
WANG Jinshan,WANG Xiaodong,SHI Xiaozhong,et al. Numerical analysis for weak signal detection based on Duffing chaotic system[J].Chinese Journalof Scientific Instrument,2005, 26(8):33−34.
[11]LEUNG H,HUANG Xingping.Sinusoidal frequency estimation in chaotic noise[J].International Conference on Acoustics, Speech,and Signal Processing,1995,3(2):1344−1347.
[12]范剑,赵文礼,王万强,等.基于Duffing振子的微弱周期信号混沌检测性能研究[J].物理学报,2013,62(18): 180502-1−180502-6.
FAN Jian,ZHAOWenli,WANGWanqiang,et al.Study on the weak sinusoidal signal detection property using Duffing chaos system[J].Acta Physica Sinica,2013,62(18):180502-1−180502-6.
[13]WANG Guanyu,HE Sailing.A quantitative study on detection and estimation of weak signals by using chaotic Duffing oscillators[J].IEEE Transactions on Circuits and Systems I: Fundamental Theory and App lications,2003,50(7):945−953.
[14]李月,石要武,马海涛,等.湮没在色噪声背景下微弱方波信号的混沌检测方法[J].电子学报,2004,32(1):87−90.
LIYue,SHIYaowu,MA Haitao,etal.Chaotic detectionmethod for weak squarewave signal submerged in colored noise[J].Acta Electronica Sinica,2014,32(1):87−90.
[15]邓宏贵,曹文晖,杨兵初,等.基于混沌理论和小波变换的微弱周期信号检测方法[J].中南大学学报(自然科学版),2012, 43(5):1773−1779.
DENG Honggui,CAO Wenhui,YANG Bingchu,et al.Weak periodical signal detection based on wavelet threshold de-noising and chaos theory[J].Journal of Central South University (Science and Technology),2012,43(5):1773−1779.
[16]冯进钤,徐伟,牛玉俊,等.Duffing单边碰撞系统的颤振分岔[J].物理学报,2010,59(1):157−163.
FENG Jinqian,XUWei,NIU Yujun.Chattering bifurcations in a Duffing unilateral vibro-impact system[J].Acta Physica Sinica, 2010,59(1):157−163.
[17]李月,路鹏,杨宝俊,等.用一类特定的双耦合Duffing振子系统检测强色噪声背景中的周期信号[J].物理学报,2006, 55(4):1672−1677.
LIYue,LU Peng,YANG Baojun.Applying a special kind of two coupled Duffing oscillator system to detect periodic signals under the background of strong colored noise[J].Acta Physica Sinica,2006,55(4):1672−1677.
[18]SHISihong,YUAN Yong,WANG Huiqi.Weak signal frequency detection method based on generalized Duffing oscillator[J]. Chinese Physics Letters,2011,28(4):040502.
[19]李月,祁放,张铭,等.微弱正弦信号的一种新的混沌检测系统[J].仪器仪表学报,2004,25(Z1):19−20.
LIYue,QI Fang,ZHANG M ing.The detection of weak sine signals using special chaotic system[J].Chinese Journal of Scientific Instrument,2004,25(Z1):19−20.
(编辑 陈灿华)
W eak signaldetection system based on
Duffing oscillator w ith linear driven by to-be-detected signal
LUM ing1,MA Songshan1,2,DING Jiafeng1,HUANGWei3,YUAN Hong3
(1.School of Physics and Electronics,Central South University,Changsha410083,China; 2.Institute of Super-m icrostructure and Ultrafast Process in Advanced M aterials,Central South University, Changsha 410083,China; 3.The third X iangya Hospital,Central South University,Changsha 410083,China)
Considering that the weak signal detection methods based on Duffing oscillator w ith periodic driving force signal have the defects that the detection accuracy can be affected by the critical threshold and the frequency resolution is nothigh enough,a new weak signal detectionmethodwas presented based on Duffing oscillator,which wasdriven by the linear perturbation of the to-be-detected signal.In the method,the small change of the linear perturbation parameters could cause the output change,and then this characteristic could be used to detect the w eak signals submerged in the background noise.Meanwhile,based on the Melnikov function and themaximum of Lyapunov exponent,the feasibility of the detection system was analyzed.The results show that themethod can greatly improve the frequency resolution of weak signal,and the precision of the frequency achieves 10−4.It can also enhance the noise immunity ability and elim inate the effectof critical threshold on the precision of the system.
Duffing oscillator,chaos;weak signal detection;frequency
TN911.7
A
1672−7207(2017)03−0721−08
10.11817/j.issn.1672-7207.2017.03.021
2016−03−21;
2016−05−25
国家自然科学基金资助项目(61172047,11204263);湖南省科研条件创新专项(2011TT1009)(Projects(6172047,11204263) supported by the National Natural Science Foundation of China;Project(2011TT1009)supported by the Special Funds of Scientific Research Innovation of Hunan Province)
马松山,副教授,从事微弱信号处理研究;E-mail:songshan@csu.edu.cn
