民机静压源误差修正程序模拟
2017-05-18黄頔
黄頔


[摘要]本文介绍了民机静压源误差修正的原理并利用Matlab编写的程序,对修正过程进行仿真。在试飞之前预估了静压源误差修正中插值表格方法的数值误差,并得出结论:运用表格插值计算的静压源误差修正设计方案合理,不会影响飞行安全。
[关键词]民机;静压源误差修正;仿真;Matlab
0引言
由于飞机飞行过程中速度、高度等重要飞行参数均由传感器测得的压力经公式计算得来。因此,压力测量的准确与否与飞机飞行安全息息相关。然而由于压力传感器所处位置当地流速与实际飞行速度不同,同时传感器当地流场又受到马赫数、飞机姿态与飞机构型影响,压力传感器测量值与远场压力存在误差,需要进行误差修正以获得尽量接近远场压强的数值输入给大气数据计算机。实际飞行中,由于总压传感器高出机身附面层且安装方向正对来流,其测量值的误差极其微小,因此只对静压源误差进行修正。
1静压源误差修正原理介绍
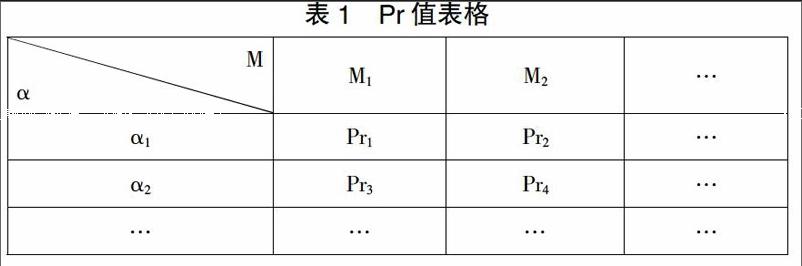
由于压力传感器所处位置当地流速与实际飞行速度不同,因此传感器当地压强与远场压强也不相同。定义压力比Pr:
在飞行过程中,大气数据计算机首先由传感器测量的当地压强计算出当地马赫数,利用上述表格通过线性插值计算出该时刻对应的Pr值,然后由公式(1)计算远场压强值。由于在飞机试飞前无法获取飞行数据,表格中的Pr值通过对CFD结果进行4阶拟合,得到以下形式的公式进行计算:
(2)
2静压源误差修正模拟程序工作流程
由于修正过程使用线性插值方法会引人数值误差,为了在试飞前预估该误差的大小,本文使用Matlab程序对修正过程进行模拟,模拟流程如下:
a)建立差值用表格:
b)读取给定的飞行数据:
c)通过公式(2)反向计算传感器当地压强、马赫数;
d)将传感器当地数据代入插值算法中计算修正结果:
e)输出、比较修正结果与输入值。
用于模拟的飞行数据使用五边飞行,包括了一个完整的起降剖面。首先滑跑起飞,待爬升至一定高度时开始下降,此后平飞一段时间然后再次下降、着陆。初始构型为起飞构型,爬升至一定高度后进入巡航构型。开始下降时进入着陆构型。起落架初始为放下状态,离地一定高度后收起,之后在进入着陆构型时再次放下。
3模拟结果与误差
本章节展示了远场压强和校準空速(CAS)的模拟结果。因民机适航条款(CCAR-25.1323)对其误差有直接要求:校准空速误差需小于校准空速的3%或5 knots(二者取较大值),加入校准空速的模拟结果较为直观。以下图1为远场压强的模拟结果,图2为校准空速的模拟结果。
如图所示,远场压强以及校准空速的修正值与输入值基本重合。其中当CAS<=166.67knots时CAS的最大绝对误差为0.0446knots,当CAS>166.67knots最大相对误差为0.0083%(cAS=166.67knots时3%CAS=5knots)。均远小于适航条款的规定。
4小结
本文描述了静压源误差修正的原理并探讨了一种基于Matlab程序开发对静压源误差修正过程的仿真方法。仿真结果显示,使用线性插值方法修正的远场静压与校准空速均与真实值基本一致。其中校准空速的最大绝对误差为0.0446knots,最大相对误差为0.0083%,分别为适航条款规定上限的0.892%和0.277%,留给其他误差组分的余度充分。因此认为使用插值表格进行静压源误差修正的设计方案合理可靠,不会影响飞行安全。
[责任编辑:杨玉洁]
