基于图像处理和线性拟合的鱼体尾柄测量方法研究
2017-05-18胡祝华曹路张逸然赵瑶池
胡祝华曹 路张逸然赵瑶池
(1海南大学信息科学技术学院,海南海口,570228;
2南海海洋资源利用国家重点实验室(海南大学),海南海口,570228)
基于图像处理和线性拟合的鱼体尾柄测量方法研究
胡祝华1,2,曹 路1,张逸然1,赵瑶池1
(1海南大学信息科学技术学院,海南海口,570228;
2南海海洋资源利用国家重点实验室(海南大学),海南海口,570228)
水产养殖场内的鱼体尾柄测量在养殖管理中有着重要意义。目前的尾柄测量方法主要依靠人工,操作复杂、效率低,且结果主观性强。研究提出一种基于图像处理和线性拟合的鱼体尾柄测量方法。首先在养殖场通过装置采集图像,通过边缘检测和轮廓提取得到鱼体的外部轮廓,基于鱼的形态特征这一先验知识,提取到尾柄感兴趣区域,最后对尾柄区域进行角点检测和最小二乘直线拟合,得到尾柄线长度。结果显示,该方法平均测量耗时1.01 s,平均测量偏差0.34 mm,测量精度达到95%以上。采用该方法不仅可以解决人工测量操作繁琐、主观性强等问题,而且能够避免测量过程耗时过长,为鱼体尾柄的大批量非接触式测量提供有效新途径。
鱼体尾柄;长度测量;图像处理;最小二乘直线拟合;湛江流沙港
我国的水产养殖产量占世界总产量的65%以上[1]。在水产养殖管理中,鱼体可量性状的获取对养殖业十分重要,它不仅直观反映了不同养殖环境与应激条件下鱼的生长状况,同时也是养殖者进行喂养、捕捞、分级的主要信息依据[2]。金鲳鱼(Trachinotus ovatus)作为一种沿海养殖鱼种,其尾柄长度(length of caudal peduncle)具有较为显著的特征,与鱼的成熟周期有着紧密联系。现有的测量方法仍主要依靠人工,操作者需手持测量尺接触测量。这种方法易受操作者主观影响,劳动强度大、效率低、检测结果主观性强[3]。同时,由于测量耗时过长,容易造成鱼脱水死亡[4]。
针对可量性状快速无损检测的实际需求,已有相关学者开展各种检测方法的研究。如余心杰等[4]设计出一种大黄鱼可量性状检测系统;JEONG等[5]结合传感器和工业相机设计出一个传送检测装置,对比目鱼的体长、体宽和体重等参数进行测量;IVORRA等[6]通过采集受检鱼的形态参数数据并进行三维重建,从而设计出预测受检鱼体新鲜度的系统。然而,以上研究基本都是围绕受检鱼的体长、体宽等明显性状进行的,对于尾柄等细节部位仍依赖于手工测量。针对上述问题,提出一种基于图像处理和线性拟合的鱼体尾柄测量方法。该方法利用装置获取鱼体图像、利用图像处理技术获取尾柄区域的准确轮廓、创新利用角点检测和最小二乘线性拟合精准获取到尾柄轮廓,进而计算出尾柄长度。该方法不仅可以自动、批量测量鱼的尾柄长度,还可以将人工测量所带来的主观误差降到最低。
1 材料与方法
1.1 人工测量尾柄
尾柄作为鱼的一种局部特征,能够直观体现鱼的生长状况。图1为尾柄区域示意图。
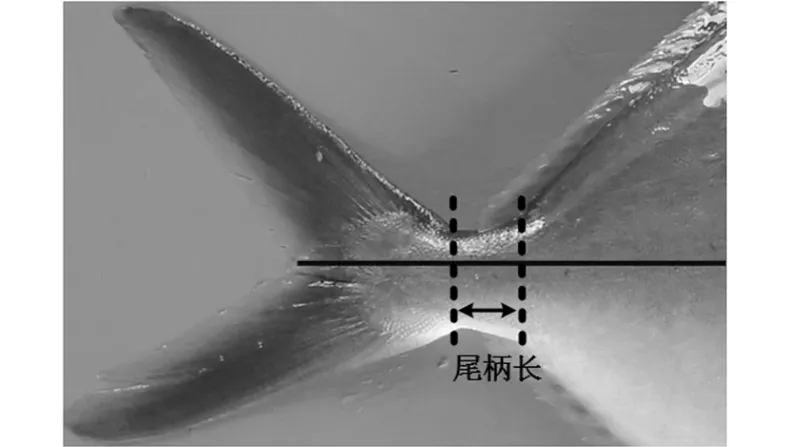
图1 鱼的尾柄示意图Fig.1 Fish caudal peduncle of schematic diagram
现有的测量方法主要通过操作者手持测量工具接触测量(图2)。这种方法主观性强、测量耗时长,对日益增长的大批量渔业作业来说是一个严峻挑战。

图2 人工测量尾柄长度Fig.2 Artificial caudal peduncle length measurement
1.2 鱼体轮廓获取
在水产养殖场,利用实验装置(图3)快速获取到俯视角度下的鱼体图像(图4a)。鱼体平放在实验平台上,采用图4中的方法进行处理,得到鱼体轮廓二值图像,输出结果如图4e所示。

图3 实验装置Fig.3 Experimental equipment
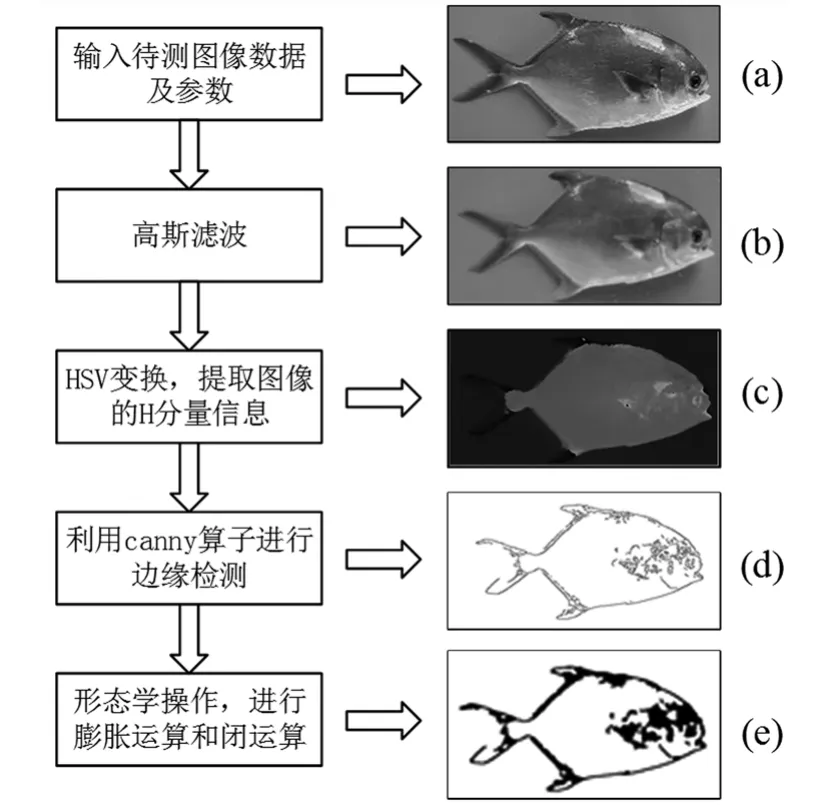
图4 鱼体轮廓处理步骤Fig.4 Fish contour processing steps
1.3 尾柄ROI区域的提取与图像预处理
为了降低分析复杂度、提高测量系统效率,在测量尾柄长度的过程中,需要提取尾柄的ROI(Region of Interest)区域[7]以替代鱼体整体图像作为输入。所谓ROI区域即处理时的感兴趣区域。首先对图4e的鱼体二值图像进行外轮廓提取(图5a、图5b);循环遍历轮廓图像,得到鱼体四周的边缘点(图5c);对图像建立笛卡尔坐标系,得到鱼翅两侧坐标P1、P2、鱼嘴尖坐标P3和尾鳍尖一侧坐标P4(图5d)。

图5 金鲳鱼尾柄ROI区域提取过程Fig.5 ROI extraction of trachinotus ovatus caudal peduncle
由于尾柄区域下侧线具有清晰易测量的特点,本研究考虑尾柄区域的下半部分。已知金鲳鱼的尾柄区域长度约占鱼体总长度的 4/25(图6a),进一步缩减ROI区域,最终提取到的尾柄区域如图6b所示。
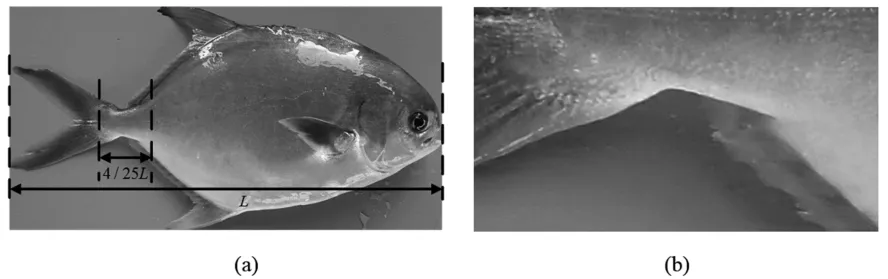
图6 提取到的尾柄区域Fig.6 The extraction of caudal peduncle
对提取到的尾柄区域进行图像预处理操作(图7)。首先对彩色图像进行灰度化处理(图8a)[8];为了避免噪声对后续操作的影响,对灰度图像进行中值滤波[9](图8b);然后利用Canny算子[10]对去噪后的图像进行边缘检测,多组实验证明当阈值为100时效果较好(图8c);为了增强轮廓边缘、填充空隙,使用大小为的结构元素进行形态学闭运算操作[11](图8d);对提取到的轮廓进行条件筛选,最终得到尾柄线轮廓(图8e);图9为多组轮廓提取实验的验证结果。
该项目充分体现了多方协同,贯穿项目生命周期的一体化规划、设计、施工和运维的BIM应用理念,其交付过程广泛使用了各领域内最新的BIM解决方案。项目组在项目初期即制定了详细的BIM执行计划,明确了项目组成员的各自建模与模型管理任务以及成员间的数据/信息交换标准和协议,清晰地建立了协同合作的技术与交流平台,并有效地结合了其他建筑行业内的高新技术创新,包括装配式建筑、施工机器人、移动计算、云计算以及虚拟现实等(见图3)。
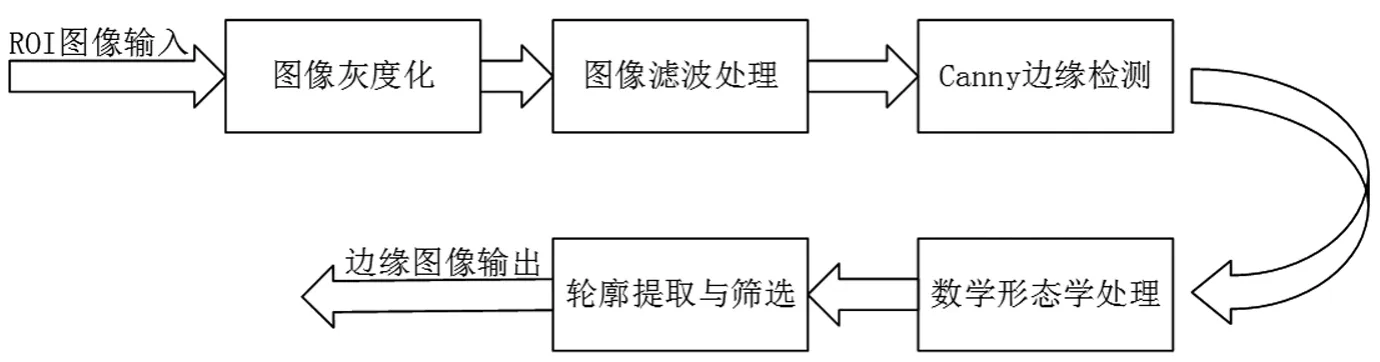
图7 图像预处理步骤Fig.7 Image pre-processing steps
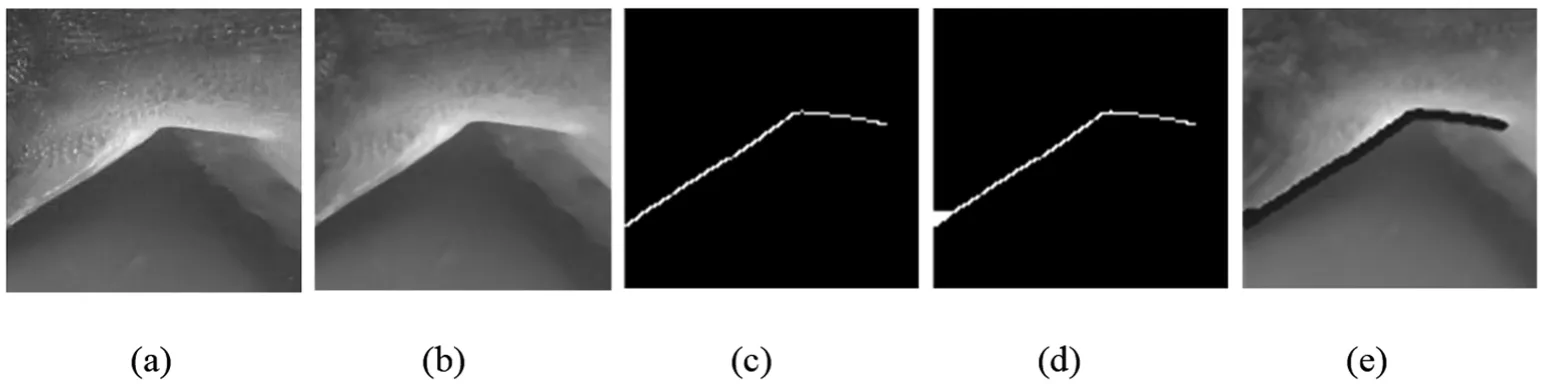
图8 尾柄区域图像预处理Fig.8 Preprocessing of caudal peduncle
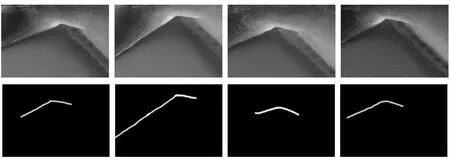
图9 尾柄区域轮廓提取Fig.9 Contour extraction of caudal peduncle
2 方法
2.1 亚像素角点检测
角点检测作为一种局部特征点检测,其灰度图像在角点处的一阶导数为局部最大,图像的灰度在水平和竖直方向上均有变化,较为经典的有Shi-Tomasi算法[12]和Harris算法[13]。设灰度图像在点(x,y)处的值为I(x,y),以该点为中心建立一个n×n的窗口O,窗口平移[x,y]后产生的灰度变化为:

对于局部微小移动量,对I(x+Δx,y+Δy)进行泰勒展开并带入(1)式,表示成矩阵形式:

其中M为2×2的矩阵

E近似看作局部互相关函数,利用矩阵M来衡量(x,y)是否为角点。令λ1,λ2是矩阵M的两个特征值,Shi-Tomasi算法[12]指出,如果kλ2max≤λ2≤λ1(λ2max是任意像素点较小特征值中的最大值),即能求得角点。
在尾柄实际测量中,往往需要较高的精度。传统的角点检测只能得到简单的像素坐标,而亚像素理论能将精度提升到亚像素级。有研究表明,图像中一个尖锐峰值点的位置一般都不位于一个像素点的正中心[14];向量的点积理论提出,一个向量与其正交向量的点积为0,角点的两个边缘符合这种相交关系。实际计算亚像素角点的位置时,解的是一个点积表达式为0的方程组。图10为点积都为0的两种情况,其中每一个方程都是由q邻域的一个点产生。搜索窗口的中心是整数坐标值的角点,并从中心点在每个方向上扩展指定的像素。这些等式构成一个可用自相关矩阵的逆来求解的线性方程组。每找到一个q的新位置,就需要以这个新的角点作为初始点进行迭代,直到满足定义的迭代终止条件。
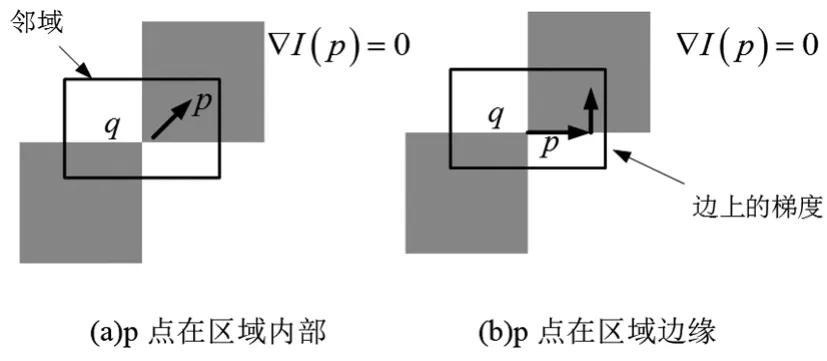
图10 向量点积为0的两种情况Fig.10 Two situations when vector dot product is 0
2.2 最小二乘直线拟合鱼体尾柄测量
测量尾柄长度的一种简单方法是计算尾柄轮廓拐点与右侧轮廓端点间的距离。但是,由于实际轮廓的边缘并不平整,存在许多小的凸起和断点(图11),若直接进行角点检测会导致误检。为了解决上述问题,本研究提出一种新思路:将亚像素角点检测[15]与最小二乘直线拟合[16]相结合并应用于尾柄线长度测量。
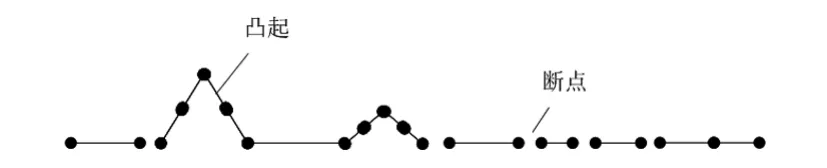
图11 轮廓曲线放大示意图Fig.11 Magnified outline curve
欧式距离[17]被广泛地应用于向量间的距离度量。设两个像素的坐标分别为(x0,y0)、(x1,y1), 则 欧 式 距 离 可 定 义 为dis=最小二乘直线拟合[16]是利用离散分布,且总体呈直线轨迹的坐标点来求出直线参数。设直线带参方程为y=ax+b,利用直线轨迹上某个区间离散点的坐标(xi,yi)(i-1,…,n),定义误差项S(a,b)=∑(yi-ax-b)2,最小二乘法原理要求S达到最小值,S最小的条件为:可得:
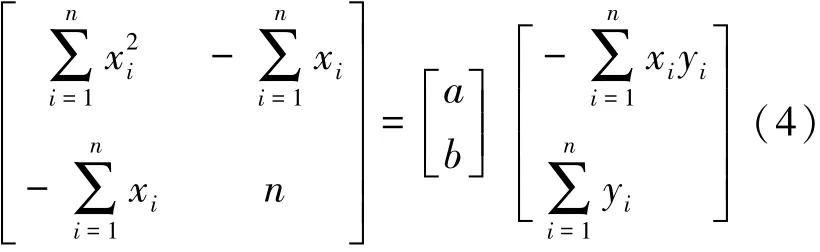
直接解方程可求出参数a,b:
首先将检测到的角点进行存储,对该点集进行遍历并寻找轮廓顶点和最右侧端点。以轮廓顶点作为分界,左侧点集记为左点集,右侧点集记为右点集,分别对两侧点集进行最小二乘直线拟合,最终得到两条拟合直线。通过计算两条直线的交点与轮廓最右侧端点间的欧式距离,即可得到尾柄线长度。具体算法:
(1)将尾柄ROI轮廓图像I(x,y)作为输入。
(2)根据亚像素角点检测算法对尾鳍轮廓曲线进行角点检测,通过设定一个较高的阈值T,得到n组角点集合P=∑ni=1p(xi,yi)。
(3)令pT、pR分别为尾柄轮廓的顶点和最右侧端点,pxm为点P集中x坐标值最大的点,pym为点集p中y坐标值最小的点。遍历点集P,当存在一点p(xi,yi),满足p(yi)=pym(y)时,将该点坐标值赋给pT,当满足时p(xi)=pxm(x),将该点坐标值赋给pR。
(4)顶点pT是轮廓的最高点,同时也是左右两条曲线的分界点,以该点为界,将该点及该点左右两侧角点分别存储在不同集合。其中左侧点集为PL,右侧点集为PR。
(5)对左右两侧点集PL、PR中的点分别进行最小二乘直线拟合,得到拟合的直线方程l2、l2以及其交点坐标pC,将pC近似为轮廓曲线的拐点。
(6)尾鳍线测距可转换为求解轮廓拐点与右侧端点间的欧氏距离,根据,计算出dis。
(7)输出尾柄线长度dis。
3 结果
为了验证本文方法的有效性,设计了一个由600 mm×500 mm实验平台、机械手臂、工业CCD相机、图像采集卡和计算机构成的测量装置(图3)。其中,工业相机通过1394接口与计算机的图像采集卡相连,并将其固定于机械手臂上。以300条同批次金鲳鱼为实验对象,实验场地为广东省湛江市流沙港某水产养殖场。实验中使用2.2 GHz Intel(R)Core(TM)i5计算机,内存为2GB,用VS2013+OpenCV2.4编程实现。
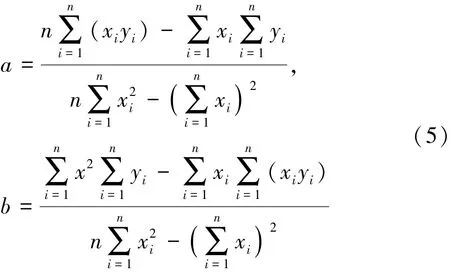
按照本文方法,先对图像进行预处理操作,然后进行边缘检测得到尾柄线图像,对尾柄线两侧分别进行最小二乘直线拟合(图12)。
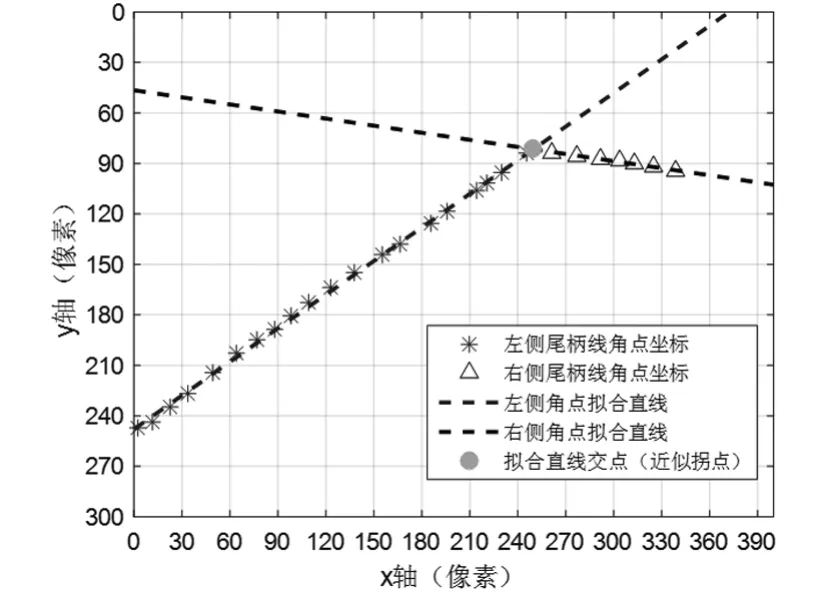
图12 尾柄线两侧曲线的最小二乘直线拟合Fig.12 Least squares linear fitting of the two sides of the caudal peduncle
分别对300条金鲳鱼进行实验,将实验对象分成20组,以每15条统计结果的平均值作为该组的测量结果,统计得到的拐点拟合误差如图13所示。相较于标准测量结果,本文方法相对误差平均值为0.47 mm。

图13 拟合拐点误差Fig.13 Deviation curve of inflexion fitting
通过计算尾柄线右侧端点与拟合拐点间的欧式距离,最终得到测量结果(图14)。从图中可以看出,本研究方法与标准测量数据作对比,两种方法的实际测量结果基本一致,本文方法的平均偏差为0.34 mm,测量精度达到95%以上。
图14 测量结果对比Fig.14 Comparison of measurement result
分别对20组实验对象耗时进行记录,耗时分别为:1.062、1.015、1.062、1.109、0.985、0.921、1.046、1、1.008、1.109、0.99、0.991、1.203、0.922、0.905、0.999、0.905、0.999、1.14、0.89 s。相较于人工测量的3~5 s,本文方法平均耗时约1.01 s,耗时更短。
4 讨论
4.1 不同光照条件下测量偏差的对比
光照均匀条件下的测量偏差较低,原因是在该条件下图像处理的阈值容易确定,图像处理效果较好;而在光照非均匀条件下,图像局部过亮或过暗,难以确定较为稳定的阈值范围,从而影响到图像处理的效果。由于图像处理的效果直接影响尾柄轮廓检测的准确率,因此,针对非均匀光照条件下的尾柄线提取需要进一步改善。
4.2 测量方法速度和精度的对比
Njc[18]指出手工测量的速度约为每分钟12条;Jeong等[5]针对比目鱼的体长、厚度、体重等多个参数设计了一套基于机器视觉的检测系统,实现了每分钟15条的测量速度。本文方法主要针对尾柄部位进行测量,能够达到每分钟约60条的测量速度。在应用于大批量测量时,相较于人工测量,本文方法检测速度更稳定、测量结果更准确客观。其原因是人工测量结果易受操作者偏好影响,主观性较强,当测量基数增大时,这种差异会愈发明显;不同操作者的熟练度也会影响测量耗时,随着体力的消耗,耗时也会明显上升。另外,本文以小批量鲳鱼的多次人工测量平均数据作为参考对比数据,实验也同样证明,在保证尾柄测量精度的同时还可以大大提高测量的时效性。
4.3 倾斜角度的影响
Hsieh等[19]和 Williams等[20]针对鱼体形态参数提出了一种基于机器视觉的检测方法,对不同倾斜角度下的鱼体测量结果进行了分析和讨论。为了简化分析过程,本文考虑鱼体中轴线基本保持水平,在低倾斜角存在的条件下本文方法处理良好,但在较大倾斜角下(例如60度)处理效果不佳。因此,下一步研究工作会将鱼体倾斜因素考虑进来。
5 结论
提出了一种基于图像处理和线性拟合的鱼体尾柄测量方法。该方法解决了当前鱼体尾柄测量仍然依靠人工,且操作繁琐、效率低下、结果主观性强等问题,在保证较为准确地测量尾柄长度的情况下,有效降低了测量所需时间。由于受实验样本个数的限制,本方法实验范围偏小,在以后的研究中,将针对大批量鱼体的尾柄测量进行更多探索。 □
[1] 王德芬,王玉堂,杨子江,等.我国渔业多功能性的研究与思考[J].中国水产,2012(1):9-14.
[2] 段延娥,李道亮,李振波,等.基于计算机视觉的水产动物视觉特征测量研究综述[J].农业工程学报,2015,31(15):1-11.
[3] MA Q,JIANG J,ZHU D,et al.Rapid measurement for 3D geometric features of maize ear based on image processing[J].Transactions of the Chinese Society of Agricultural Engineering,2012,28(1):208-212.
[4] 余心杰,吴雄飞,王建平,等.基于机器视觉的大黄鱼形态参数快速检测方法[J].集成技术,2014(5):45-51.
[5] JEONG S J,YANG Y S,LEE K,et al.Vision-based Automatic System for Non - contact Measurement of Morphometric CharacteristicsofFlatfish[J].Journalof Electrical Engineering&Technology,2013,8(5):1194-1201.
[6] IVORRA E,VERDU S,SÁNCHEZ A,et al.Predicting Gilthead Sea Bream(Sparus aurata)Freshness by a Novel Combined Technique of 3D Imaging and SW-NIR Spectral Analysis[J].Sensors,2016,16(10):1735.
[7] 吴微,苑玮琦,林森,等.手掌静脉识别中感兴趣区域的选择与定位研究[J].光电子·激光,2013(1):152-160.
[8] 刘春晓,朱臻阳,伍敏,等.基于主色检测与灰度传播的彩色图像灰度化方法[J].计算机辅助设计与图形学学报,2016,28(3):433-442.
[9] 沈学利,王肃国.基于FPGA的改进型中值滤波算法研究[J].微电子学与计算机,2014(1):21-24.
[10]CANNY J.A computational approach to edge detection[J].IEEE Transactions on pattern analysis and machine intelligence,1986(6):679~698.
[11]陈勇平,郭文静,王正.基于数学形态学的木材单板节子识别改进算法[J].林业科学,2015,51(9):90-95.
[12]SHI J,TOMASI C.Good features to track[C]//IEEE Computer Society Conference on Computer Vision&Pattern Recognition,Cvpr.CiteSeer,1994:593-600.
[13]HARRIS C.A combined corner and edge detector[J].Proc alvey vision conference.1988,15(50):147-151.
[14]易子豐,孙坚,钟绍俊,等.基于OpenCV的高精度零件角点距离测量研究[J].电视技术,2011,35(17):126-128.
[15]任继昌,杨晓东.基于角点检测的双目视觉测距新方法[J].电光与控制,2013,20(7):93-95.
[16]范文博,王文龙,陈岳龙,等.最小二乘直线拟合方法及其在同位素地质年代学中的应用研究[J].地质论评,2013,59(5):801-815.
[17]ZHAN Z,SHI L,WANG B,et al.A improved CF model base on normaldistribution and Euclidean distance[C]//International Conference on Computer Science& Education.IEEE Xplore,2009:189-192.
[18]NJC S.Length measurement of fish by computer vision[J].Computers&Electronics in Agriculture,1993,8(2):93-104.
[19]HSIEH C L,CHANG H Y,CHEN F H,et al.A simple and effective digitalimaging approach for tuna fish length measurement compatible with fishing operations[J].Computers&Electronics in Agriculture,2011,75(1):44-51.
[20]WILLIAMS K, LauffenburgerN, ChuangM C, etal.Automated measurements of fish within a trawl using stereo images from a Camera-Trawl device(CamTrawl)[J].Methods in Oceanography,2016,17:138-152.
Study on fish caudal peduncle measuring method based on image processing and linear fitting
HU Zhuhua1,2,CAO Lu1,ZHANG Yiran1,ZHAO Yaochi1
(1 College of Information Science and Technology Hainan University,Haikou 570228,China;2 State Key Laboratory of Utilization of Marine Resources in the South China Sea(Hainan University),Haikou 570228,China)
The measurement of fish caudal peduncle in aquaculture farm is of great significance in aquaculture management.At present,the main measuring method is depend on manual work which is inefficient and subjective.This study proposed a new measuring method based on image processing and linear fitting.Firstly,the images are collected in the fish farm using equipments;then,the external contour of the fish is obtained through edge detection and contour extraction based on the fish morphological character;finally,the length of caudal peduncle is figured out using corner detection and least square line fitting after the extracting of ROI of the caudal peduncle.The results show that the average measurement time is 1.01 seconds,the average measurement error is 0.34 mm,and the accuracy of measurement has reached over 95%.Lots of studies have shown that the proposed method can not only solve the problem that manual operation is complex as well as subjective,but also avoid time-consuming measurement;and provide an effective way for non-contact mass measurement of fish caudal peduncle.
fish caudal peduncle;length measurement;image processing;least square line fitting;Liusha port of Zhanjiang
TP391.41
A
1007-9580(2017)02-043-07
10.3969/j.issn.1007⁃9580.2017.02.008
2017-01-09
海南省自然科学基金项目(20166232,20167238,617033);南海海洋资源利用国家重点实验室开放项目子课题(2016013B);海南大学研究生优秀学位论文培育计划项目
胡祝华(1979—),男,副教授,博士研究生,研究方向:智慧农业,信号处理。Email:eagler_hu@163.com
赵瑶池(1980—),女,副教授,硕士,研究方向:图像处理,智能系统。Email:yaochizi@163.coms
