基于ADAMS的五轮起网机仿真分析
2017-05-18洋黄志龙
何 洋黄志龙
(1渤海大学工学院,辽宁锦州121013;
2东北大学机械工程与自动化学院,辽宁沈阳110819)
渔业装备
基于ADAMS的五轮起网机仿真分析
何 洋1,黄志龙2
(1渤海大学工学院,辽宁锦州121013;
2东北大学机械工程与自动化学院,辽宁沈阳110819)
针对中小型渔船起网工作效率低、安全生产事故频发等问题,研制了五轮起网机。为确定该机的最佳工作参数、探究五轮起网机的工作性能,介绍分析了该起网机的工作原理和摩擦鼓轮的受力情况并建立其载荷的数学模型,确定了摩擦鼓轮与网纲间摩擦力及摩擦矩的计算方法;利用Pro/E的变量化设计和实体造型技术,建立了该机的三维实体模型,实现了整机各组成部分的建模及装配,并通过干涉分析验证了机构设计的合理性;然后利用无缝接口软件Mechanism/pro将整机三维模型映射入ADAMS环境中进行动力学仿真分析。通过对不同马达转速、摩擦鼓轮与网纲间摩擦系数以及网纲与摩擦鼓轮的包角分析,确定该机最佳工作参数为:马达转速110 r/min,起网速度25 m/min,摩擦鼓轮摩擦系数0.4,网纲与船舷的夹角小于70°。利用Adams/Vibration模块对该机进行振动特性分析,搞清了振动较大的频率范围为30~40 Hz。所得结论为提高该机工作性能及参数优化提供了依据。
五轮起网机;摩擦鼓轮;ADAMS;仿真
在我国多数沿海地区,147 kW以下中小型渔船捕捞机械装备主要采用半机械半人力操作,很多渔船上都没有配备专用的捕鱼起网装备,普遍采用人工方式或自制的土设备起网。如有利用废弃的“汽车后桥(俗称牙包)”改制而成,也有用废弃的齿轮经过简单的焊接而成[1-5]。这些土设备缺乏相关的理论设计依据,而且没有制动系统,制动主要靠人工实现,当起网的拉力超过额定负荷时,就会出现摩擦鼓轮空转,网具在摩擦鼓轮上打滑,造成网具严重磨损。另外,渔船在海上作业时一旦遇到风浪,网纲会左右摆动并与起网机产生摩擦碰撞,不仅网具会严重损毁,给渔民带来财产损失,而且劳动强度大、起网效率低,经常出现设备损坏、断网以及伤人等重大安全生产事故,安全隐患非常大。因此,研制中小渔船起网机对提高生产安全性和捕捞效率具有重要意义[6-9]。研制五轮起网机,其优点在于该机在马达的进油口处设有高压回止阀,可防止空转,实现制动系统自动化。另外,通过设置活动的安全挡棍和箱体中间的摩擦鼓轮,不仅增加了起网拉力,而且使网具平稳地导入摩擦鼓轮,提高了工作效率和作业安全性。
1 五轮起网机结构与工作原理
五轮起网机由箱体、齿轮、轴、摩擦鼓轮、连接盘、底座等几部分组成(图1)。起网机采用液压系统控制,马达输出轴与变速箱内的输入轴连接配合,并带动输入轴上的齿轮Z1与Z2、Z3两齿轮啮合,Z2、Z3两齿轮与齿轮Z4啮合,同时齿轮Z4带动介轮Z5分别与Z6、Z7两齿轮相啮合,最后由与Z2、Z3、Z4、Z6、Z7齿轮相配合的输出轴带动缠绕在摩擦鼓轮的网纲,将网具平稳收起。连接盘与底座可相对旋转以调节箱体与网纲的角度,确保网纲与变速箱体夹角为零,防止网纲摩擦箱体。马达换向手柄的控制开关可完成起网和撒网工作。从工作原理看,摩擦鼓轮的承载能力是起网效率的关键因素,因此有必要分析摩擦鼓轮的载荷形式。
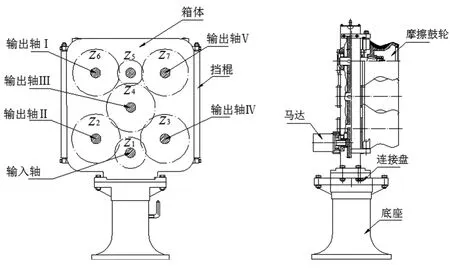
图1 五轮起网机结构简图Fig.1 Structure diagram of five wheels-net hauler
2 摩擦鼓轮载荷模型
2.1 摩擦鼓轮的摩擦力
五轮起网机起网过程简图如2所示。起网过程中摩擦鼓轮主要承受网纲拉力F、摩擦力f以及拉力FT,以输出轴Ⅰ的摩擦鼓轮为研究对象确定摩擦鼓轮的摩擦力,其它摩擦鼓轮可采用同样方法计算。
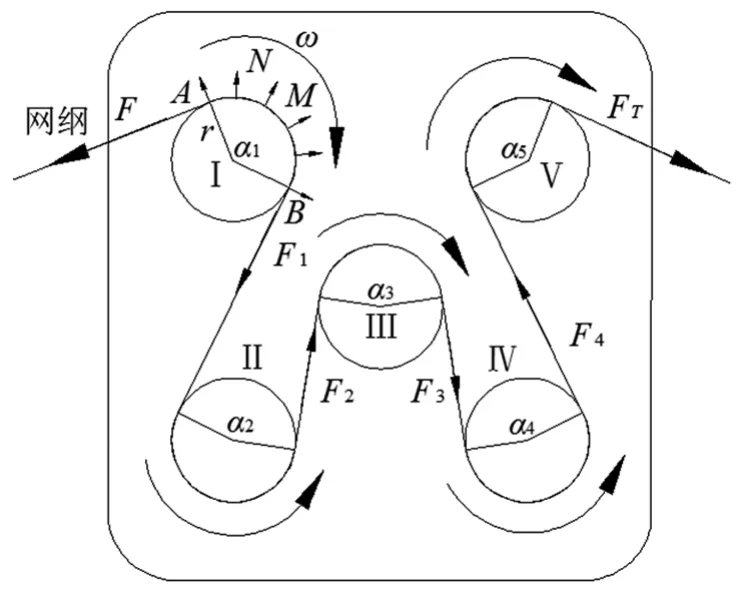
图2 起网过程示意图Fig.2 Process diagram of hauling process
将圆弧AMB分为n等份,每小段网纲长设为△l,设圆弧AMB中任意一段(第i段)网纲两边的拉力及其摩擦力分别为Fi,Fi+1,fi。参照文献公式[10-11]


式中:k—压力密度,N/m3;η—摩擦系数;r—摩擦鼓轮半径,m。
由上式可知,每小段网纲△l两边的拉力构成公比为(1+lμ/nr)的等比数列,则

式中:α1—包角,rad;F—网纲拉力,N。
同理,可确定F2,F3,F4,FT
当网纲缠绕摩擦鼓轮的圈数较多时,设等效摩擦力为f′i,有

式中:m—缠绕圈数。
2.2 摩擦鼓轮扭矩
摩擦矩与空载时的扭矩之和为摩擦鼓轮的扭矩,该扭矩在摩擦鼓轮旋转时,摩擦矩与摩擦鼓轮的半径比值即摩擦力[12],即

式中:Ti—摩擦矩,N·m;fi—摩擦鼓轮的摩擦力,N;T′i—负载扭矩,N·m;T—空载扭矩,N·m;r—摩擦鼓轮半径,m。
3 虚拟样机建模
基于Pro/E变量化设计和实体造型技术,根据相关设计参数完成各零件的建模以及装配[13-14],建立五轮起网机三维实体模型(图3)。
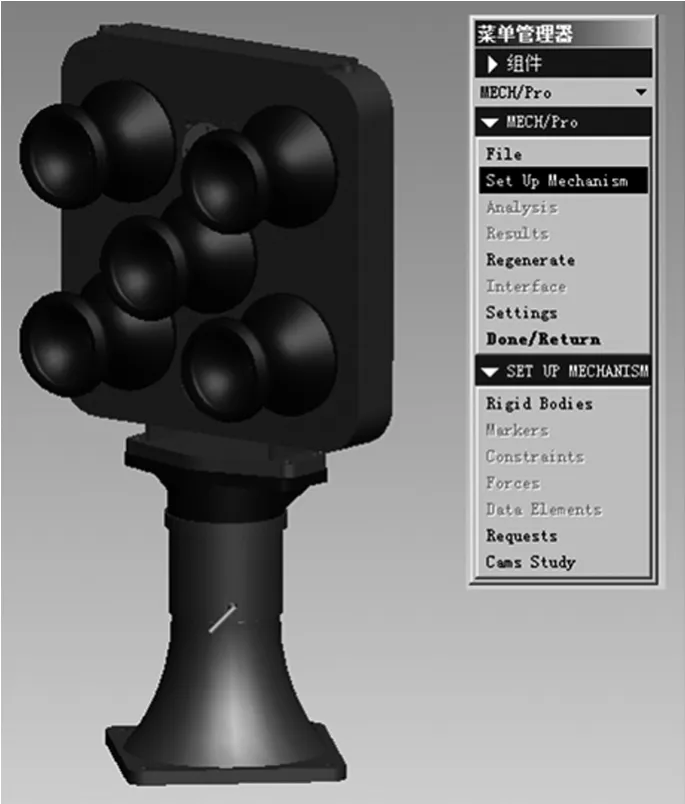
图3 五轮起网机三维模型Fig.3 Three-dimensional model of five wheels-net hauler
利用无缝接口软件 Mechanism/pro[15],在Pro/E中对五轮起网机装配体定义刚体,各个部件逐一添加约束后,将模型导入 Adams/view中[16]。由于海上作业风浪作用,起网拉力具有随机性,在ADAMS载荷定义中对起网拉力F添加服从瑞利分布随机函数[17-18]。其相关参数为:最大起网速度v=45.8 m/min,最大起网拉力F=11.5 kN,马达额定转速n=200 r/min,马达功率P=131 kW,最大阻尼系数c=50 N·s/mm,回归系数b=0.007 78,轴许用弯曲应力[σ-1]=60 MPa,转向角β=75°,马达额定转速n=200 r/min,步频200,仿真时间20 s。
根据前述摩擦鼓轮载荷计算方法及其相关参数对虚拟样机模型添加载荷及驱动[19-20],定义各零部件的材料属性,最后进行模型验证,确保映射到运动模型中的约束及驱动满足运动要求,由此完成该机分析的前处理阶段。通过上述过程,建立的五轮起网机虚拟样机模型如图4所示。
图4 五轮起网机虚拟样机Fig.4 Virtual prototype of five wheels-net hauler
4 仿真分析
4.1 摩擦系数的影响
图5和图6分别为拉力FT和摩擦力f随摩擦系数μ仿真变化关系曲线图。由图5可知,当摩擦系数μ<0.4时,拉力FT随摩擦系数μ的增大而逐渐减小,μ=0.4时,FT趋近于0;摩擦系数μ>0.4时,拉力FT反向增大。主要原因为摩擦系数增大到一定程度,起网拉力F主要由摩擦鼓轮与网纲间的摩擦力承担。图6表明,μ<0.4时,摩擦力f随摩擦系数μ增大而增大,且变化明显;μ>0.4时,f趋向为定值,拉力FT继续增大对起网拉力F无作用。因此,摩擦鼓轮与网纲间的最佳摩擦系数取0.4。
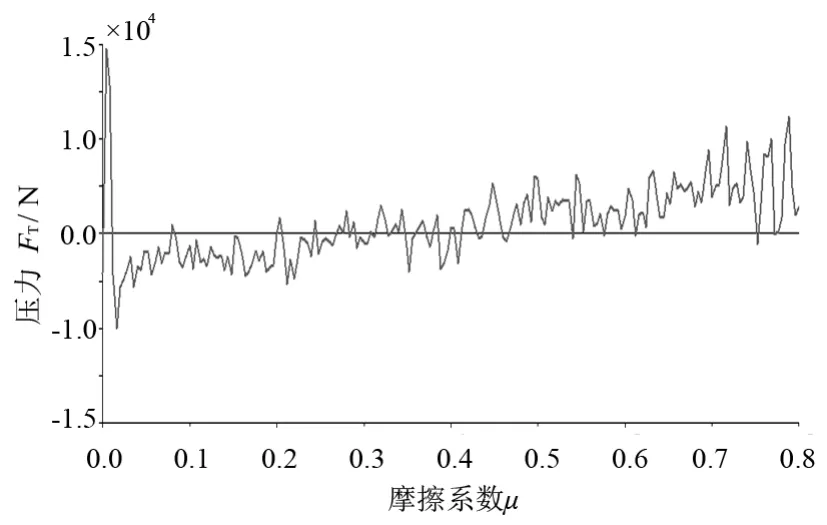
图5 拉力FT与摩擦系数μ变化关系曲线Fig.5 Relationship curve between tensionFTand friction coefficientμ
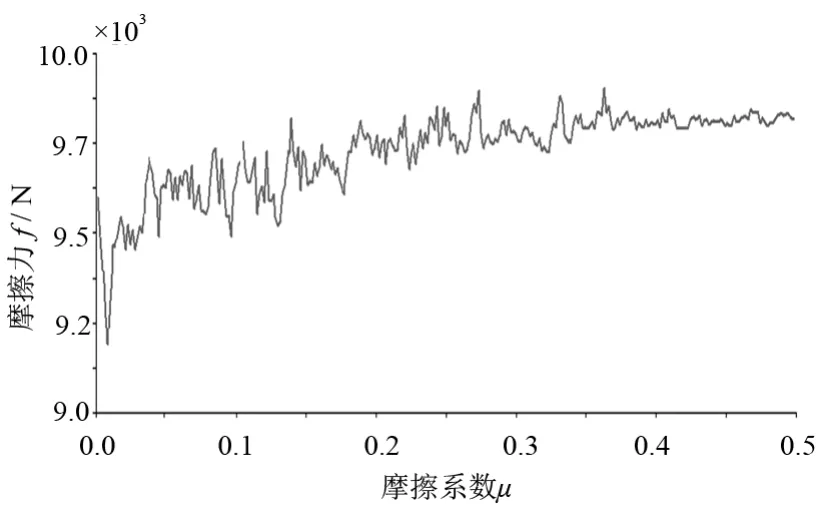
图6 摩擦力f与摩擦系数μ变化关系曲线Fig.6 Relationship curve between frictionfand friction coefficientμ
4.2 马达工作转速的影响
摩擦系数取μ=0.4,图7和图8分别为输出轴Ⅰ的扭矩以及摩擦矩随马达转速变化仿真曲线。
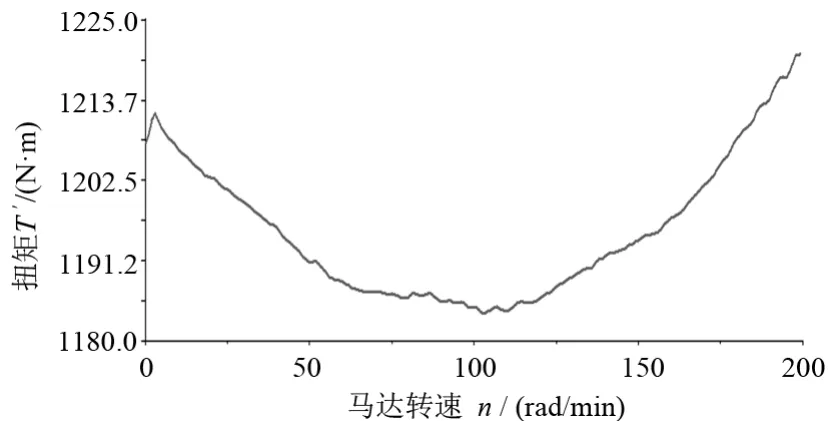
图7 输出轴Ⅰ扭矩T′随马达转速n变化曲线Fig.7 Curve of torqueT′of output shaft I varying with motor rotate speedn
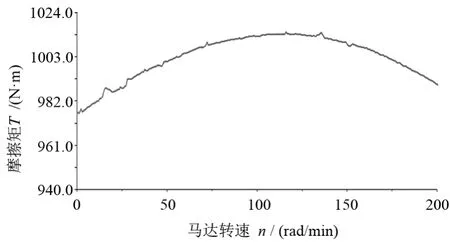
图8 输出轴Ⅰ摩擦矩T随马达转速n变化曲线Fig.8Tcurve of output shaftⅠwith motor rotate speedn
由图7可见,n<110 r/min时,随着马达转速的增加,输出轴Ⅰ的扭矩逐渐减小,最小值为T=1 185 N·m。图8表明,马达转速100 r/min<n<125 r/min,摩擦矩趋于最大,该转速范围内摩擦鼓轮起网性能最佳。因此,马达最佳转速为n= 110 r/min,起网速度为v=25 m/min。
4.3 包角α1的影响
起网机起网作业的工位不同,会形成网纲与摩擦鼓轮包角的变化,不同包角会对摩擦鼓轮与网纲间摩擦力产生一定的影响。取摩擦系数μ=0.4,马达转速n=110 r/min。图9为摩擦鼓轮与网纲间摩擦力f随包角α1变化的仿真曲线。仿真结果表明,包角小于140°时摩擦力变化较大,网纲与摩擦鼓轮间产生相对滑动,而包角大于140°时,摩擦力变化较小并趋于定值。因此,起网机作业过程中,网纲与船舷的夹角应小于70°。

图9 摩擦力f随包角α1变化曲线Fig.9 Curve of frictionfwith wrapping angleα1
4.4 模态分析
由于起网机海上作业工作环境恶劣,风浪作用使摩擦鼓轮载荷变化较大且具有波动性、冲击性,致使整机工作过程振动强烈,不仅加剧了材料的磨损,而且降低机器零部件使用寿命。因此有必要对该机振动测试分析,搞清系统振动较大频率范围。
利用 Adams/Vibration模块对整机模态分析,绘制加速度响应的二维及三维频率响应图(图10a及图10b)。提取6阶模态数据(表1),由表1可见,前2阶的模态固有频率为零,没有共振现象;第3、4、5、6阶固有频率集中在7~44 Hz内,频响图峰值分别出现在 31 Hz和40 Hz附近,与第4、第5阶固有频率相近,分别为28.711 2 Hz、39.732 4 Hz,阻尼比分别为0.274 962、0.453 499。整机系统在摩擦鼓轮载荷耦合作用下的振动工作频率与第4、第5阶固有频率较接近,该频率处的整机振动明显。由频响图可以看出,振动峰值主要集中在30~40 Hz范围内,其它频段曲线较为平直,没有较大的振动。因此,可通过增加系统的刚度以及液压系统阻尼等参数来降低振动[21-22]。
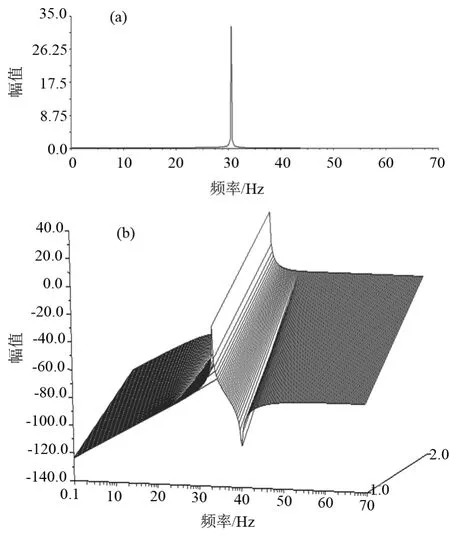
图10 加速度频响图Fig.10 Frequency response diagram of acceleration
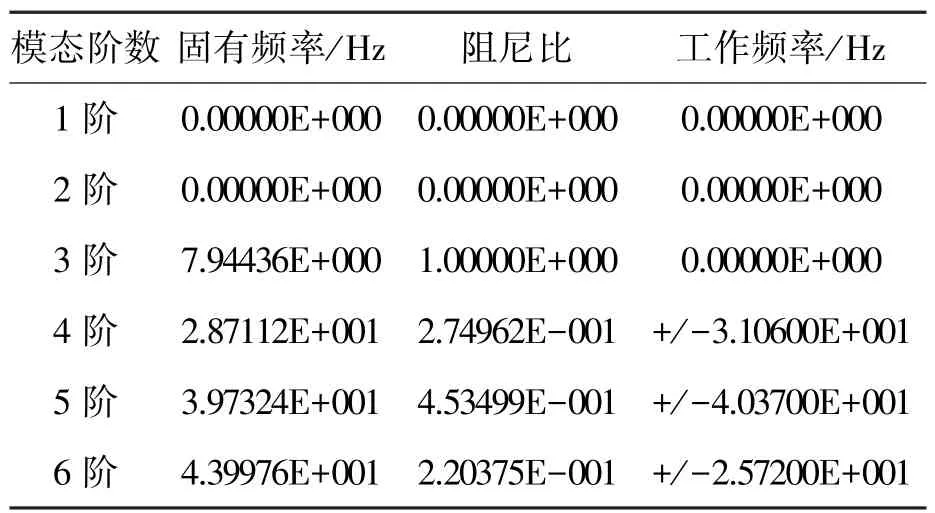
表1 模态数据Tab.1 Modal data
5 结论
(1)利用Proe/E与ADAMS联合仿真方法,建立五轮起网机的虚拟样机模型并对其仿真分析,确定了该型起网机的马达最佳转速、起网速度、摩擦鼓轮与网纲间的摩擦系数以及网纲与船舷的夹角。(2)借助Adams/Vibration模块对整机模态分析,提取了模态振型特征,发现该机工作时振动较大的频率范围集中在30~40 Hz范围内。本结论对进一步改进起网机设计参数、减少人工作业劳动强度、提高捕捞效率以及工作可靠性和稳定性具有较强的实践指导意义。 □
[1] 张铮铮,李胜忠.我国远洋渔业装备发展战略与对策[J].船舶工程,2015(6):6-10.
[2] 王传荣.我国海洋渔业装备亟待升级[J].中国船检,2012(10):57-59.
[3] 刘世禄,冯小花,陈辉.关于加快发展我国远洋渔业的战略思考[J].渔业现代化,2014,41(4):63-67.
[4] 门涛.渔业捕捞机械标准现状与发展方向[J].现代农业科技,2010(17):251-253.
[5] 黄一心,徐皓,刘晃,等.我国渔业装备科技发展研究[J].渔业现代化,2015,42(4):68-74.
[6] 贺波.世界渔业捕捞装备技术现状及发展趋势[J].中国水产,2012(5):43-45.
[7] 岳冬冬,王鲁民,张勋,等.我国海洋捕捞装备与技术发展趋势研究[J].中国农业科技导报,2013(6):20-26.
[8] 农业部渔业政管理局.中国渔业统计年鉴[M].北京:中国农业出版社,2016:87-88.
[9] 胡庆松,王曼,陈雷雷,等.我国远洋渔船现状及发展策略[J].渔业现代化,2016,43(4):76-80.
[10]马登云,熊彪,方凡涛,等.基于RecurDyn V带传动的仿真与分析[J].机械传动,2014(9):118-122.
[11]李小泉.基于有限元的发动机皮带轮受力分析[J].汽车零部件,2015(6):74-78.
[12]江涛,徐中伟,王志勇,等.渔船舷侧滚筒绞拉力特性试验[J].渔业现代化,2012,39(3):59-65.
[13]芮执元,程林章.基于Pro/E与ADAMS结合的虚拟样机动态仿真[J].现代制造工程,2005(1):56-58.
[14]罗锦华,章程,赵成宏.基于Pro/E和ADAMS的动力学联合仿真研究[J].船电技术,2011,31(9):69-71.
[15]李美琴,何涛.Pro/E和ADAMS之间模型传递的常见问题[J].机械工程师,2010(5):77-78.
[16]李晓豁,何洋,李婷,等.纵轴式掘进机横向和纵向随机振动响应的分析[J].煤炭学报,2013,39(3):580-585.
[17]吴小平.基于切片理论的波浪载荷直接计算[J].船舶与海洋工程,2010(4):21-25.
[18]刘平,徐志强,焦耳.基于ANSYS/WorkBench的围网理网机优化设计[J].渔业现代化,2015,42(4):48-51.
[19]郝双双,李阳星,刘训涛.基于ADAMS的带式输送机实体仿真模型建立方法[J].煤矿机械,2008,29(2):178-180.
[20]贺金虎,廉自生.基于ADAMS的带式输送机输送带动特性仿真分析[J].制造业自动化,2014(7):91-93.
[21]赵晶晶,周燕,时振刚,等.电磁轴承刚度阻尼自动测试[J].机械工程学报,2010,46(20):48-52.
[22]付杰,熊世树,纪晗,等.多自由度结构的拟负刚度阻尼器减振效果分析[J].华中科技大学学报(自然科学版),2014(2):46-50.
Based on ADAMS simulation analysis of five wheels-net hauler
HE Yang1,HUANG Zhilong2
(1College of Engineering of Bo Hai University,Jinzhou,Liaoning 121013,China;2School of Mechanical Engineering and Automation of Northeastern University,Shenyang,Liaoning 110819,China)
In order to solve the problems of low work efficiency and frequent accidents of production safety for small-and medium-sizefishing vessels,a five wheels-net hauler was developed.In order to confirm optimum working parameters and working performance of five wheels-net hauler,working principle and force load of friction hub wheel were introduced and analyzed and the mathematical model was determined.The friction and frictional torque between the friction hub wheel and bush rope were ascertained.By applying variational design and solid modelling technology of Pro/E,the three-dimensional mode of five wheels-net hauler was established,which achieved the modelling and assembling of various components of entire hauler body.The rationality of mechanism design is verified by interference analysis.Then,the 3D model of the whole body was mapped into the ADAMS environment by using the software Mechanism/pro for dynamic simulation analysis.Based on the analysis of speeds of different motors,friction coefficient and wrapping angle between friction hub wheel and bush rope,the optimal working parameters of the machine were determined:110 r/min for motor speed,25 m/min for hauling speed,0.4 for friction coefficient of friction hub wheel,less than 70°for the angle between bush rope and shipboard.All parameters meet the specification and stable performance.The best work parameter for the five wheels-net hauler is Using Adams/VibrationVibration module to analyze the vibration characteristic of five wheels-net hauler,the frequency range for strong vibration was 30-40 Hz.These conclusions obtained has laid the foundations for improving working performances and parameters optimization of five wheels-net hauler.
five wheels-net hauler;friction hub wheel;ADAMS;simulation
S972.68
A
1007-9580(2017)02-056-06
10.3969/j.issn.1007⁃9580.2017.02.010
2017-01-09
渤海大学大学生创业计划指导项目(201610167040)
何洋(1982—),男,讲师,博士,研究方向:机电一体化技术与应用。E-mail:heyang121000@163.com
