一种双拖网渔船起网机安全防护装置的结构设计
2017-05-18黄添彪范细秋谢永和马志军彭雪芹
黄添彪范细秋谢永和马志军彭雪芹
(1浙江海洋大学东海科学技术学院,浙江舟山316000;2舟山市海晨船务工程有限公司,浙江舟山,316000)
一种双拖网渔船起网机安全防护装置的结构设计
黄添彪1,范细秋1,谢永和1,马志军2,彭雪芹1
(1浙江海洋大学东海科学技术学院,浙江舟山316000;2舟山市海晨船务工程有限公司,浙江舟山,316000)
针对在海上恶劣作业环境下双拖网渔船起网机作业存在严重安全隐患的问题,对双拖网渔船的结构布局、起网机工作情况和已有安全防护装置进行了分析,设计了一套对原船体不做重大结构调整的纯机械结构起网机安全防护装置。利用数控车床的主轴功能,模拟4种不同起网线速(28、45、65和75 m/min)的渔船起网机作业状态,对安全防护装置进行了测试。结果显示,模拟船员因作业时遇险而激发防护装置,缠绕船员的网绳继续向摩擦鼓轮移动的距离远低于1.5 m;通过距离、速度、时间之间的换算关系,安全防护装置关停起网机低于1s,可在更大程度上避免船员发生因起网机引起的作业安全事故。研究表明,该保护装置可为拖网渔船起网机操作起到安全保护作用。
双拖网渔船;起网机;机械;结构;安全防护装置
现代渔船主要捕捞机械设施设备有绞车、动力滑车、起网机、鱼泵和网鼓轮等[1]。现代渔船的生产效率取决于捕捞装备的机械化和自动化水平。海洋捕捞渔业属高危险性产业,世界上每年在捕捞作业中死亡的人数约为25 000人,捕捞作业人员的安全问题非常突出[2-3]。我国渔船及捕捞装备的技术水平与渔业发达国家相比有很大差距,主要表现在渔船装备研发严重落后、自动化程度低和产品故障率高等方面[4]。捕捞作业仍主要靠人工完成,作业环境较为恶劣,存在大量的工伤事故[5]。其中如双拖网渔船,一般以双甲板舷拖网形式为主,左右两舷可轮流作业,拖网速度较快,起网摩擦鼓轮侧向裸露在左右两舷位置,缺少防护罩与安全防护装置[6-9]。而起网机主要由起网手操控完成,一旦起网机发生意外,如起网手无法及时进行操控,导致渔民手脚被网绳缠住很难脱身而被牵引至起网机中,轻则手脚折断,重则危及生命的安全生产事故[10-13]。
1 造成安全事故的主要原因
1.1 双拖网渔船结构布局拥挤
我国拖网渔船大多是20世纪50—70年代建造,近年来新建渔船虽然在船舶性能、动力配备、助渔导航仪器、甲板机械等方面应用了部分新技术[14-15],但起网机作为两舷的主要捕捞设备,均设在两舷宽度不足105 cm的位置。起网摩擦鼓轮侧凸裸露60 cm左右,占据了两舷的显要位置,两舷既要作为连接船头与船尾的通道,又要承担起放、收网的任务。在捕捞作业过程中,不仅显得拥挤,而且对来往船员生命安全构成威胁。
1.2 双起网机工作情况复杂
渔船的作业环境相对恶劣,船上捕捞机械装备采用半机械、半人力操作。许多作业程序仍须依靠人力完成[5]。起网作业中,如起网机转速过低,起网时间就会延长,从而会降低捕捞量;转速过高,又会使网纲与绞轮之间产生严重“打滑”,不仅造成起网绞轮磨损严重,也严重损害网具与相关动力配备的使用寿命。目前对起网机起网速度优化的研究有了很大提升[16-17],起网机起网速度可达65 m/min[18],JY20/80型起网机起网线速度能达到75 m/min[19]。在拖网绳速如此高的环境下容易产生网绳纠缠现象,需要操作人员现场迅速给予清理,加上拖网拉力较大,如果没有设置起网机的安全防护装置,将威胁到渔民的生命安全。
1.3 已有的安全防护装置问题较多
目前已有多种形式的外配起网机安全防护装置,其中实用性较强的有2种:一种是脚踏式[20],另一种是液压式[21]。前者虽在原手动关停的功能上增加了脚踏急停功能,但缺少主动防护功能,虽能减少或降低事故率,但仍然存在安全隐患;后者的液压安全保护装置需要液压管路和大量液压油,其体积和重量都较大,维护成本较高[22-23]。目前,起网机安全防护装置普遍存在占据空间大、配置复杂、成本较高、宜人性差和油污污染环境等问题,并在恶劣工况下可靠性差。
2 防护装置的原理结构、安装与防护
2.1 原理结构
根据造成事故的主要原因与已研发出的安全防护装置推广范围较小的现状,安全防护装置的结构最适合采用重力平衡原理(图1)。结合初始重力平衡,装置机构主要由配重块定位架、配重块组件、定滑轮A、柔性件A、急停开关和柔性件B等构件构成。可拆分成2个相互作用的四连杆机构,采用复数矢量法逐个分析。首先由定滑轮A和急停开关两构件的支点为中心的连线做固定杆,以定滑轮A、柔性件A和急停开关3个构件构成第1个四连杆结构,然后由以急停开关和定滑轮B两个构件的支点为中心的连线做固定杆,以定滑轮B、柔性件B和急停开关3个构件构成第2个四连杆结构,结合封闭矢量方程式的复数矢量形式与欧拉公式,可以确定各构件间的关键尺寸与其他参数。
2.2 构件构成形式与安装要求
参照相关规范确定各构件的具体尺寸与尺寸精度、形位精度与制作材料[23-26]。起网机安全防护装置详细构件物如图2所示。
装置由配重组件定位架、配重组件、定滑轮A、定滑轮B、触碰式防护杆、柔性件A、柔性件B、急停开关、复位拉簧、锁止组件、锁止舌和旋转轴等构成。其中,双面保护触碰装置安装在起网机起网摩擦鼓轮两侧。非作业状态时,触碰式防护杆与通道面垂直,且与侧壁面平行定位。
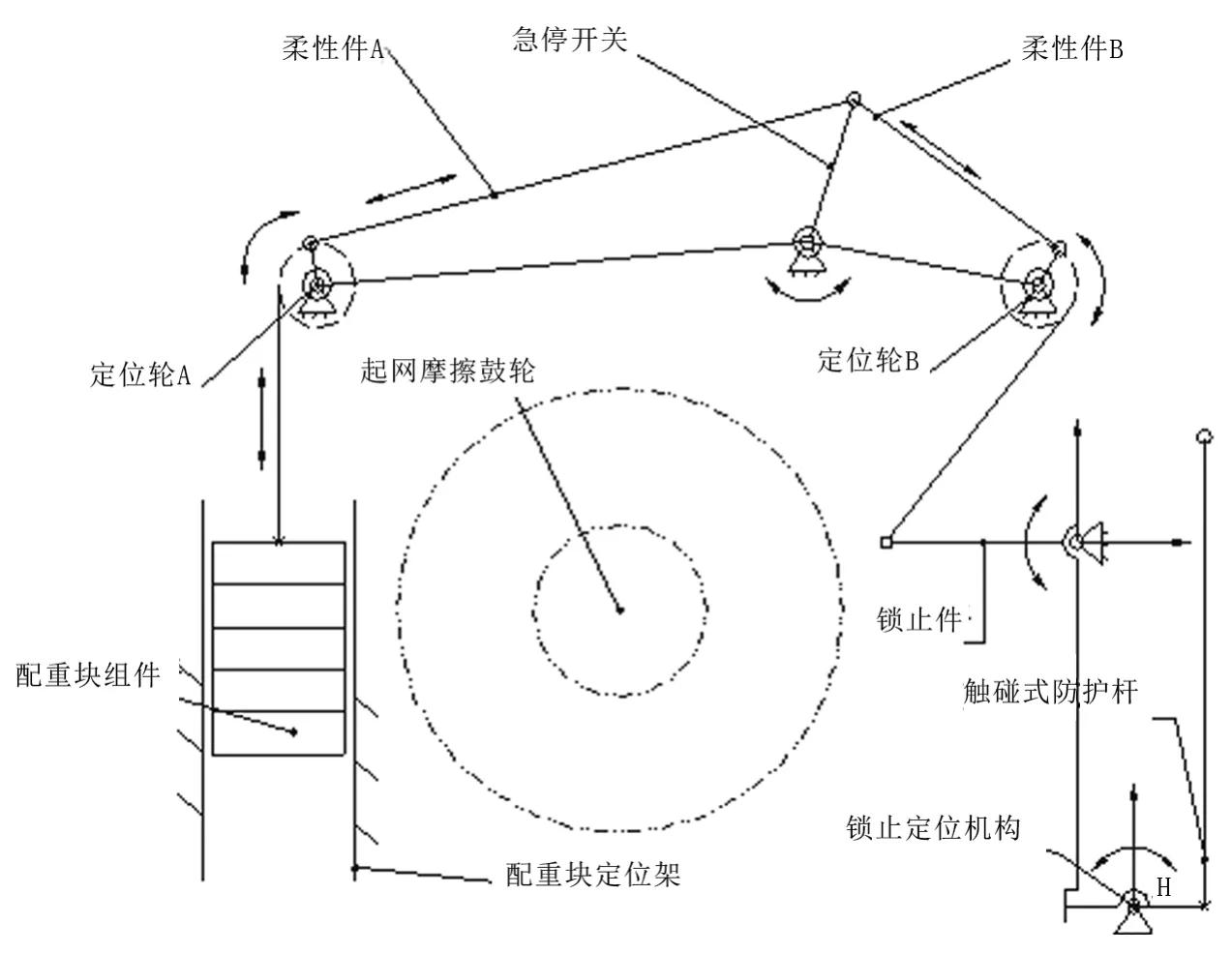
图1 安全防护装置机构示意图Fig.1 Schematic diagram of the safety protection device
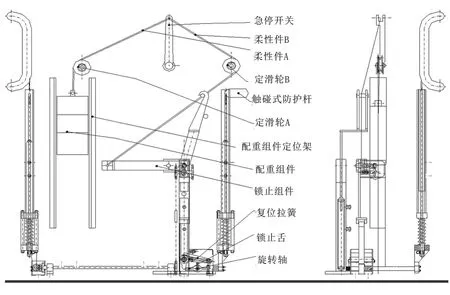
图2 起网机安全防护装置结构图Fig.2 Structure of the hauling machine safety device
2.3 装置防护协同形式
在起网作业中,船员手脚意外被网绳缠绕,由于网速快,较难脱身,船员躯体自然会触碰到触碰式防护杆,该杆瞬间带动旋转轴上固定的锁止舌旋转,迫使与锁止组件之间成90°,接触面迅速分离失效,而瞬间造成由配重组件通过柔性件A、柔性件B和锁止件组等构成的静力平衡功能失效,配重组件促使急停开关作相应急速旋转,关停起网牵引动力源—摩擦鼓轮,以达到被网绳缠绕的船员不致被摩擦鼓轮绞残甚至被绞死的严重生产事故。
3 试验分析
3.1 防护杆高度及装置功能验证
安全防护装置制作调试达到设计要求后,唯有触碰式防护杆参照人机功能学可供船员身高不同需要在650~950 mm高度范围内作相应调整[27]。首次验证功能时将防护杆高度(H)调至650 mm,由实验人员手碰杆,发现开关功能正常;将防护杆调至950 mm,再次验证开关功能是否正常后,多次重复触碰式防护杆两极限高度对起网机关停,并用秒表粗略验证,触碰式防护杆最低与最高两种极限关停时间都在1 s之内。
3.2 出海试验验证
考虑到实验需在船上直接安装样机,在船体上打钻装置定位紧固孔会造成不必要的船体微损伤。因此,采用支架贴附船体侧壁替代船体墙壁,在适当位置绑上一根长1 m左右木棍来模拟船员身体,保持木棍基本与通道垂直的拟人状态,且不与其它物体接触。重复首次验证功能实验时的操作步骤,将防护杆高度(H)分别调至最低650 mm和最高950 mm,重复木棍触碰,发现开关功能均正常,但关停较为缓慢,从木棍触碰防护杆到起网机完全关停,耗时长达3~5 s。起网机被关停后,木棍与起网机摩擦鼓轮虽然还保持有0.25 m左右的距离,但与设计初衷相去甚远。
究其原因,由于采用紧固件固定连接,件与件装配间隙较大,同时支架为了搬运轻便,刚度较低,结果发现两滑轮轴心线之间的平行度误差太大,形成较大的内八字滞卡,从而使得关停时间延长。
3.3 仿常用起网4种线速度验证
考虑到拖网渔船航行作业海况比模拟环境复杂等实际情况,在实验的关停时间上再乘取安全系数2,结果见表2。
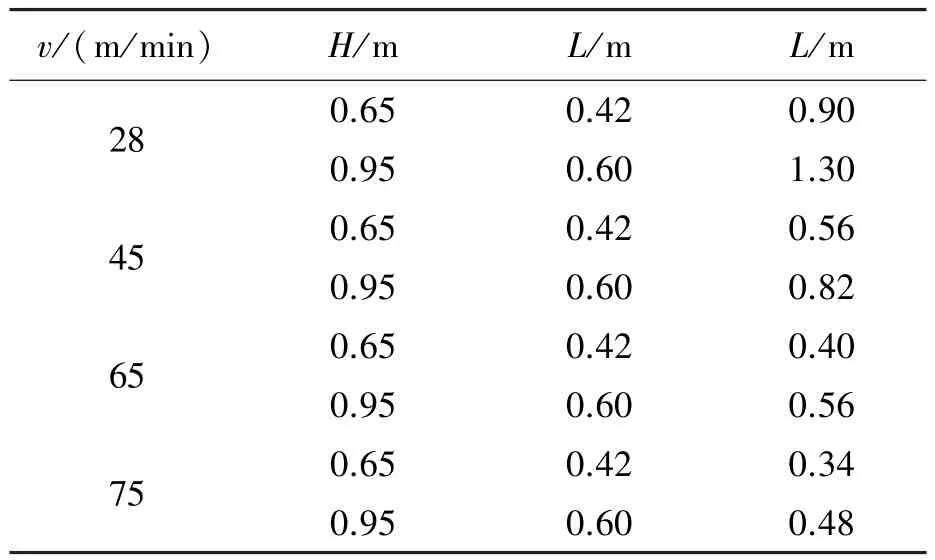
表2 起网机关停时间验证Tab.2 Shutdown time verification for the hauling machine
关停起网机摩擦鼓轮所需时间的计算公式为t=L/v(式中:t—关停时间,s;L—实测触碰触碰杆后网绳移动的距离,m;v—起网线速度,m/min)。
利用先进制造技术中心实验室中与起网机起网摩擦鼓轮同样具有主轴功能的数控车床输出主轴端卡盘,并借助其主轴上卡盘旋转转速方便可调的特性,在主轴卡盘中装夹仿摩擦鼓轮的回旋体,再利用床身上尾部顶锥,辅助导正轴心线与水平面平行后夹紧,分别模拟起网线速度为28、45、65和75 m/min的转速[16-17],并把数控车床数控装置上的红色急停按压开关换成仿起网机旋转急停开关,进行多次实验。
将触碰式防护杆高度调至两极限范围内(650~950 mm),模拟不同船员身高,渔船起网机安全防护装置耗时0.34~1.3 s时间范围内就能关停起网机。推演当船员遇险情触动防护杆时,参照当下最高起网机线速度75 m/min[19],触碰式防护杆在两极限范围内,通过距离、速度和时间之间的换算关系,起网机带动网绳继续往起网摩擦鼓轮移动距离在0.42~0.60 m之间,远低于抛锚地渔船起网开关至摩擦鼓轮之间1.5 m以上的实测距离,达到完全静止状态,避免了双拖渔船作业中重大工伤事故的发生。
4 结论
该双拖网起网机安全防护装置的特点是利用重力平衡原理,带动急停开关关停的纯机械结构,关停时间能在1.3 s内完成。参照目前新装最快速度起网机线速度75 m/min,采用先进装备模拟实验,能实现网线移动小于1 m范围内完全制动起网摩擦鼓轮的旋转,使得网绳静止,起到保护船员作业安全的目的。 □
[1] 赵永泉.国外渔船上网鼓轮的应用.现代渔业信息[J].1997,12(2):9-12.
[2] 刘世禄,冯小花,陈辉.关于加快发展我国远洋渔业的战略思考[J].江苏船舶,2014,41(4):63-67.
[3] WORD FISHING.Revolutionary trawl unveiled in New Zealand[EB/OL].(2013-10-1)[2015-1-20].http://www.World fishing.net/news101/industry-news/revolutionary-trawlunveiled-in-new zealand.
[4] WORD FISHING.Innovation and automation key to processing farmed fish[EB/OL].(2013-9-12)[2015-1-20].http://www.World fishing.net/news101/fish-processing/processing/innovation-and automation-key-to-processing-farmedfish.73.
[5] 刘平,徐志强,焦耳.基于ANSYS Work Bench的围网理网机优化高计[J].渔业现代化,2015,42(4):48-51.
[6] 徐皓.我国渔业装备与工程学科发展报告(2005—2006)[J].渔业现代化,2007,35(4):5-12.
[7] 连业江,宋新利,王传顺,等.造成渔民臂残的事故原因分析及预防措施[J].齐鲁渔业,2004,21(9):53.
[8] 谌志新.我国渔船捕捞装备的发展方向与重点[J].渔业现代化,2005,32(4):34.
[9] 徐皓,张建华,丁建乐,等.国内外渔业装备与工程技术研究进展综述(续)[J].渔业现代化,2010:1-5,9.
[10]STANDAL D,SONVISEN S A,ASCHE F.Fishing in deep waters:The development of a deep-sea fishing coastal fleet in Norway[J].Marine Policy,2016,63:1-7.
[11]ASCHE F,BJOMDALM T,BJOMDAL T.Development in fleet fishing capacity in rights based fisheries[J].Marine Policy,2014,44:166-171.
[12]RUSU L,SOARES C G.Forecasting fishing vessel responses in coastal areas[J].Journal of Marine Science and Technology,2014,19(2):215-227.
[13]黄一心,徐皓,刘晃.我国渔业装备科技发展研究[J].渔业现代化,2015,42(4):68-74.
[14]华波,素伟.对混合式拖网渔轮改用集装箱装卸鱼的方案探讨[J].渔业现代化,1979(3):30-32.
[15]KEHAYIAS G,BOULIOPOULOS D,CHIOTIS N et al.A photovoltaic-battery-LED lamp raft design for purse seine fishery:Application in a large Mediterranean lake[J].Journal of Oral Surgery,2016,32(9):671-673.
[16]蔡子俊.JYWI-2×2/50型液压绞纲机和WYL-1.0/18型液压起网机[J].渔业现代化,1983(6):16-17.
[17]谢文蔚.多辊筒式艉部围网起网机的设计与探讨[J].渔业现代化,1990(5):25-29.
[18]陈辉.恒速流网起网机简介[J].渔业现代化,2005(3):48.
[19]刘凌云.JY20/80型分列式液压绞纲机的设计[J].江苏船舶,2016,33(4):37-39.
[20]张桂珍.起网机安全保护装置:中国,2529818Y[P].2003-01-08.
[21]锦州市海洋与渔业科学研究所.渔船液压起网机安全保护装置:中国,2650504Y[P].2004-10-27.
[22]刘神顺.国外渔船甲板机械应用液压传动技术简介[J].渔业现代化,1982(1):43-45.
[23]农业部渔船检验局.钢质海洋渔船建造规范[M].北京:国防工业出版社,1998:12-35.
[24]焦尔,刘平,郑建丽,等.拖网渔船艉门架设计方法及研究[J].渔业现代化,2014,41(5):60-64.
[25]李俊峰,张雄.理论力学[M].北京:清华大学出版社,2010:91-101.
[26]徐灏.机械设计手册[M].北京:机械工业出版社,1991:325-452.
[27]巢元凯,张方,滕绍华.实用建筑设计手册[M].北京:中国建筑工业出版社,2000:11-18.
Design of a safety device for the hauling machine of double-trawler fishing vessels
HUANG Tianbiao1,FAN Xiqiu1,XIE Yonghe1,MA Zhijun2,PENG Xueqin1
(1Donghai Science and Technology College,Zhejiang Ocean University,Zhoushan 316000,China;2Zhoushan Caspian Morning Shipping Engineering Co.,Ltd.Zhoushan316000,Chian)
Aiming at the safety hazards existing in the net hauling operation of double-trawler fishing vessels under harsh marine environment,this paper analyzes the structure and layout of double-trawler fishing vessels,the operation of net haulers and the current safety devices,based on which,a set of pure mechanically structured hauler protection device that requires no significant adjustment of the vessel body has been designed.Using the spindle speed function of CNC machine tools,the operating states of four different hauling line speeds(28,45,65 and 75 m/min)of the net hauler were simulated to test the safety device.The results showed that,when the simulated crew triggered the safety device due to encountering dangers,the distance that the net rope winding the crew continued to move to the friction drum was less than 1.5 m.Through the conversion relationship of the distance,speed,and time,it was gained that the time span for the safety to shut down the hauling machine was less than 1s,which could avoid the occurrence of safety accidents caused by the net hauler to a greater extent.The research shows that this safety device can play a protecting role in the net hauling process of trawler vessels.
double trawler vessels;hauling machine;machinery;structure;safety device
U674.4+1
A
1007-9580(2017)02-062-05
10.3969/j.issn.1007⁃9580.2017.02.011
2017-01-07
舟山市科技计划项目“基于拖网渔船起网机安全保护装置研制(2016C32021)”
黄添彪(1973—),男,副教授,研究方向:海洋渔业装备、先进制造。E-mail:ahdhtb@zjou.edu.cn
