工厂化养殖自动投饵系统研究进展
2017-05-18思俞国燕
刘 思俞国燕
(广东海洋大学机械与动力工程学院,广东湛江524088)
水产养殖工程
工厂化养殖自动投饵系统研究进展
刘 思,俞国燕
(广东海洋大学机械与动力工程学院,广东湛江524088)
工厂化养殖是当前集约化水产养殖主要的生产模式,可以实现精准投饵的自动投饵系统不仅能降低饵料浪费和劳动强度,还能减少环境污染,是集约化工厂化水产养殖模式最重要的配套装备之一。本文介绍了自动投饵系统的结构组成,从上料输送系统和下料抛撒系统两个方面分析了自动投饵系统的研究现状,重点阐述了气力远程输送与轨道式行走输送这两类应用最多的集中式自动投饵系统的特点、存在的问题及解决方法。研究认为这一集水质监测、自动投饵装置和投喂决策系统于一体的闭环远程管理控制系统符合未来的发展趋势。
工厂化养殖;自动投饵系统;气力输送;轨道式输送
发展精细化与集约化养殖,促进工厂化养殖逐渐成为我国水产养殖的重要生产方式之一,并被认为是解决养殖业与环境和谐问题的出路之一[1-3]。由于饲料成本与劳动力成本是工厂化水产养殖的主要成本,其中饲料成本占养殖总成本的70%~90%[4]。挪威、加拿大、美国等水产养殖强国研发推广了系列化自动投饵系统,有效提高了投饲精度和饲料利用率,降低了劳动强度和饵料浪费,从而降低养殖成本及残饵对养殖水体的污染,推动了工厂化养殖的快速发展[4]。国内自动投饵装置研发起步较晚,人工投喂和简易的投饵机普遍应用,无法满足高密度工厂化水产养殖的快速发展需求。本文综述了国内外主要工厂化养殖配套自动投饵系统的研究进展,对其存在问题和发展趋势进行了探讨,以期为系列化、智能化的工厂化养殖自动投饵系统研发提供参考。
1 自动投饵系统结构
与早期固定在养殖池池壁上的简易投饵机相比,现代自动投饵系统已经不再是只根据设定好的程序机械地取代人工抛洒饵料动作[5],而是以提供机械化、精准化和智能化需求为核心任务,运用机械电子混合、单片机、PLC等控制模式,并结合触摸屏、物联网、自动控制技术和声学监测、机器视觉等方法,形成全自动智能投饵系统[6-13]。系统在结构上主要由自动上料输送系统、下料抛撒系统和集中控制系统3部分组成(图1)。
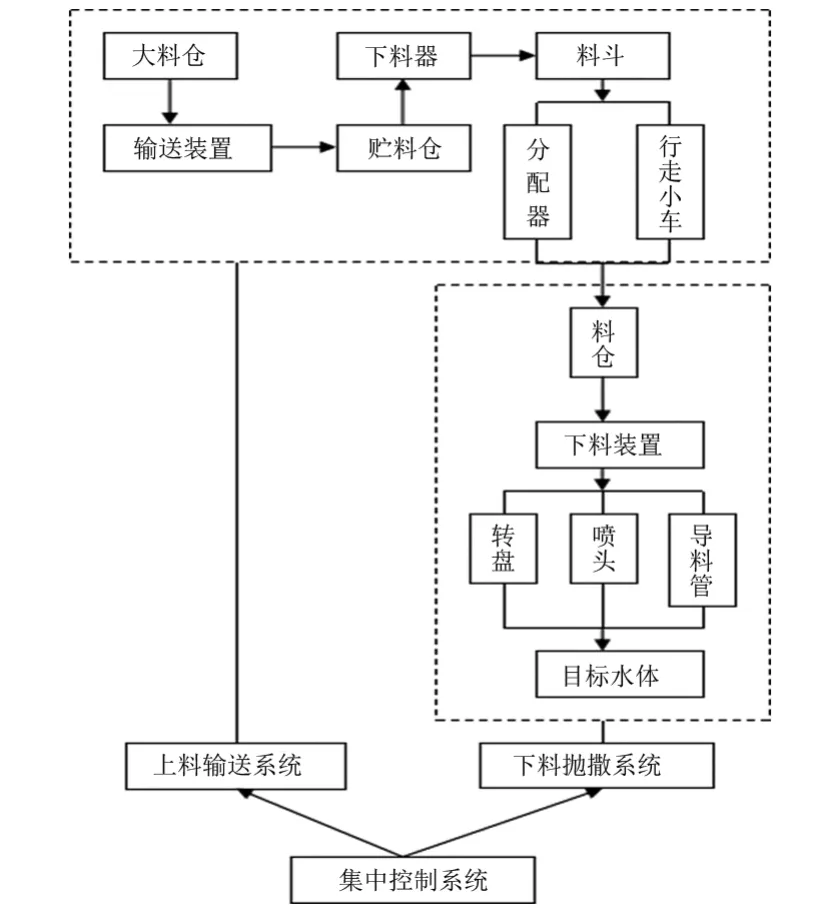
图1 自动投饵系统结构原理图Fig.1 Structure schematic of automatic feeding system
自动上料输送系统通过不同的上料输送方式将饵料输送到不同距离的养殖水面;下料抛撒系统控制下料时间、下料量和抛撒角度;集中控制系统是整个投饵设备的核心,控制前两个系统的正常运行,实现整个投饵系统的大面积定点、定时、定量的精准投喂。
2 研究现状
2.1 上料系统输送形式
2.1.1 气力输送
气力输送是目前国内外大型中央投饵系统普遍采用的一种输送方式,主要采用低压压送式。国内已研制了输送距离最大达600 m、抛投距离不小于7 m、投饵量达1 050 kg/h的投饵系统[14];国外如挪威AKVA公司研制的CCS系列自动投饵系统,其输送管道直径32~110 mm,输送距离300~1 400 m,最大投饵量11 520 kg/h[15]。在结构上,系统通过分配器(图2)实现连接不同投放位置的输送管道之间的切换。根据控制指令,分配器滑动头360°旋转到指定出料口位置,风机产生的空气流将饲料输送到管道末端抛料口,并通过抛散机构将饲料均匀抛撒到养殖水面[16-19]。这种输送方式已在深水网箱养殖、工厂化循环水养殖和标准化池塘养殖生产中被广泛应用。

图2 分配器Fig.2 Distributor
基于分配器转换的气力管道输送只能实现顺序投饵,养殖点投饵时间会受到一定的约束。为此,孙广明等[20]在每个养殖点单独配置小型投饵机,将气力输送和终端投饵单独控制,饲料在气力推动下由管道经分料阀输送到终端投饵机,接着按设定的要求向池塘抛撒,实现多点同时投饵,减少投饵周期。
2.1.2 轨道式输送
轨道式输送是在室内养殖池上方架设行走轨道,投饵装置沿着空间轨道行走,并可编程控制设置多个投放点,投饵机行走到指定位置即停止,对位于轨道下方的目标养殖池进行饵料投喂。轨道式输送主要应用在鱼、虾、蟹等水产品的室内养殖自动投喂[21-25]。芬兰Arvo-Tec公司研制的轨道式机器人运行速度达18 m/min,可投喂240个养殖池,运行距离达 450m,日投喂量高于2 000 kg[26]。
行走系统是轨道式输送系统的核心部分,主要由轨道、行走滑车和定位装置组成。因在强度上有较大优势,工字钢是目前应用最多的轨道型式。行走滑车一般由电机、齿轮减速传动装置和小车轮组成,负责将投饵机输送到指定投喂点。其输送原理是:控制系统启动行走系统开始移动,识别到安装于投饵位置的定位传感器发出的信号就停止运动,投饵机同步开启下料口进行投喂,投喂完毕后下料口关闭,重新启动行走系统移动至下个投饲点[27-28]。常用的定位装置有光电感应器、超声波感应器、射频识别技术和限位开关等,其定位精度小于50 mm[4]。
对于远距离、大面积的饲料输送,一般将上料输送系统的上料与输送装置分开设计,饵料不足时,控制系统发指令开启上料机给储料仓自动上料。皮带输送机、斗式提升机、链式输送机、螺旋输送机、气力输送机等都可作为自动上料装置。其中,螺旋输送和气力输送是水产养殖上料系统中应用最多的两种上料方式:螺旋输送是利用螺旋在固定料槽里推移物料,具有密封性好、成本低、结构简单的优点,但磨损大,适用无粘性的干粉和小颗粒物料、粘性且易缠绕物料[26,29-30];气力输送是利用气流能量输送物料,具有输送量大、结构简单的优点,但易堵料,适用于粉粒状、纤维状和颗粒状物料[30-32]。
2.2 自动下料抛撒系统
自动下料抛撒系统主要由料仓、下料装置和驱动装置3部分组成,当要求实现养殖池水面均匀投料时,则还需要在下料末端设计单独的抛散装置。下料装置常用的下料方式有电磁铁下拉式、振动式、皮带输送式、抽屉定量式、转盘定量式和螺旋输送式(表1)。自动下料系统的下料时间、间隔与下料量均可控,以满足现代水产养殖精确投饵需求。例如,国内已研制出微型定量、全自动绞笼强制排料、无传动振动式等精确投喂装置,适应料斗意外进水、精确定量小水体、筛选下料量等状况,实现饵料不堵不卡,自动下料[33-35]。
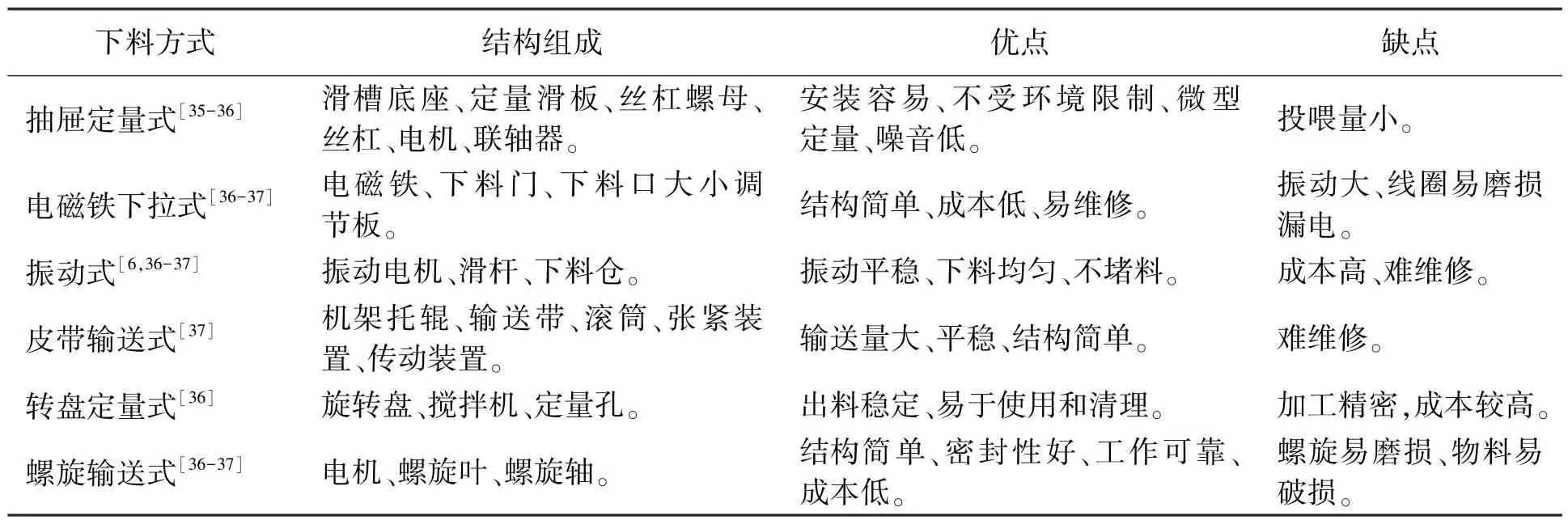
表1 不同下料方式的结构组成及优缺点Tab.1 Structure compositions of different baiting ways and their advantages and disadvantages
对于下料未端的抛散装置,最为常见的是自由下落式、风力输送式和机械离心抛撒式3种,其各自特点见表2。离心抛撒式因结构简单且可实现360°旋转无死角投喂而应用广泛,但机械离心式抛撒均匀性普遍较差,有明显偏向一边的现象。

表2 不同抛撒方式的特点Tab.2 Characteristics of different dripping ways
3 存在问题
3.1 气力输送
气力输送系统中的分配器有待优化。分配器输出管道的管径、形状、材料、气流速度以及布置形式均是影响气力输送装置设计优劣的因素。已设计出的分配器倾向于滑管式基本原理,采用上、下半圆式支管布置方式,分别设计不同的S形弯管。但基于叶片切换式、阀芯转动式原理设计的分配器较少,且阀芯转动式原理和构造较滑管式更简单[32,39]。为此,可以考虑在基于叶片切换式或阀芯转动式原理基础上,设计出不同性能的分配器,并对已有的滑管式分配器做进一步的改进。
3.2 轨道输送
行走装置的定位精度、智能化程度不高。轨道虽经打磨处理,但拼接处的缝隙较大,会干扰传感器位置判断而延迟信号传递;行走系统大都采用直流电机驱动,无法实现自锁刹车;小车车轮亦会因轨道制造、安装误差出现悬空、打滑等问题,同时跑道形轨道转弯处轮子易出现“卡死”现象,从而影响投饵定位精度;设计的无线电缆系统没有电源电量显示和反馈模块,系统会因电量不足而停止运行,无法返回到原点;系统集成自动上料装备研究尚少[4,27,31]。以上问题均影响轨道输送智能化程度。为此,可借鉴机械制造生产过程中的同类装置,如:增加导向轮机构来解决转弯处行走小车易“卡死”的情况,设计自动伸缩装置解决车轮悬空、打滑问题,增加自动补料装置和电源显示模块实现无人全自动化管理。
3.3 控制系统
控制系统的集成化、智能化程度还需要进一步提高。目前,能够同时集成水质监测、生长模型、自动投饵和鱼类摄食行为反馈于一体的闭环远程智能控制系统在水产养殖应用中尚不多见,国内对养殖鱼群的生长模型研究也刚刚起步[7,10]。为此,建议对大量不同养殖品种的生长规律进行分析总结,并不断修正养殖过程中鱼群的生长模型,建立并完善不同品种的生长模型库,为建立适用性更强的自动控制管理系统奠定基础。
4 展望
随着计算机、物联网、通讯和自动化技术的发展,轨道式、气力式输送或其它新型投饵系统在大面积的室内外工厂化养殖中的应用将越来越多,并成为必须。近年来,集物联网与通讯技术、养殖环境与对象的实时在线监测、自动投饵装置和投喂管理决策支持系统的闭环远程智能控制系统在水产养殖中应用越来越多,该系统能够量化进食鱼群参数、合理利用鱼群进食规律、确定最佳投饵关键时间,从而提高投饵效率,避免投饵过量或不足[40]。考虑到投资成本高是目前制约自动投饵系统等工厂化养殖配套装备推广应用的主要原因,建议硬件装置部分的设计按模块化、系列化、标准化方向发展,以适应不同地区、不同布局及不同养殖对象的要求,并快速构建。 □
[1] 农业部.全国渔业发展第十三个五年规划[N].中国渔业报,2017-01-09(A01).
[2] 冯天乔,刘付永忠,于培松,等.我国水产养殖装备研制应用的发展与展望[J].中国水产,2015(7):91-93.
[3] 刘星桥,骆波,朱成云.基于物联网和GIS的水产养殖测控系统平台设计[J].渔业现代化,2016,43(6):16-20.
[4] 崔龙旭,倪琦,庄保陆,等.基于PLC的工厂化水产养殖轨道式自动投饲系统设计与试验[J].广东农业科学,2014,41(22):159-165.
[5] 庄保陆,郭根喜.水产养殖自动投饵装备研究进展与应用[J].南方水产科学,2008,4(4):67-72.
[6] 吴强泽,袁永明.渔用投饲机产品现状及发展趋势[J].江苏农业科学,2015,43(10):458-461.
[7] 汤涛林,唐荣,刘世晶,等.罗非鱼声控投饵方法[J].渔业科学进展,2014,35(3):40-43.
[8] 胡利永,魏玉艳,郑堤,等.基于机器视觉技术的智能投饵方法研究[J].热带海洋学报,2015,34(4):90-95.
[9] 顾靖峰.基于物联网技术的集中式自动投饲增氧集成系统装备的开发应用[J].农业开发与装备,2016(3):57-58.
[10]王志勇,谌志新,汤涛林,等.基于.NET的池塘养殖数字化管理系统[J].南方水产科学,2013,9(1):58-62.
[11]YUKINORI M,ROSLI M K,TAN N H,et al.Demand feeding system using an infrared light sensor for brown-marbled grouper juveniles,Epinephelus fuscoguttatus[J].Sains Mlaysiana,2016,45(5):729-733.
[12]ATOUM Y,SRIVASTAVA S,LIU X.Automatic Feeding Control for Dense Aquaculture Fish Tanks[J].IEEE Signal Processing Letters,2015,22(8):1089-1093.
[13]BORSTEL F D V,SUáREZ J,ROSA E D L,et al.Feeding and water monitoring robot in aquaculture greenhouse[J].Industrial Robot-an International Journal,2013,40(1):10-19.
[14]徐志强,王涛,鲍旭腾,等.池塘养殖自动投饲系统远程精准化升级与验证[J].中国工程机械学报,2015,13(3):272-276.
[15] AKVA.CCS Feed system Product Specifications[EB/OL].[2017-03-12].http://www.akvagroup.com/products/cagefarming-aquaculture/feed-systems/ccs-feed-system/product specifications.
[16]胡昱,郭根喜,黄小华,等.基于PLC的深水网箱自动投饵系统[J].南方水产科学,2011,7(4):61-68.
[17]田应平,杨兴,周路,等.工厂化水产养殖自动投饵系统的设计[J].贵州农业科学,2010,38(5):238-242.
[18]王志勇,谌志新,江涛,等.标准化池塘养殖自动投饵系统设计[J].农业机械学报,2010,41(8):77-80.
[19]SKϕIEN K R,MORTEN O A,ARTUR P Z,et al.Feed spreaders in sea cage aquaculture– Motion characterization and measurementofspatialpelletdistribution using an unmanned aerial vehicle[J].Computers and Electronics in Agriculture,2016,129:27-36.
[20]孙广明,付志茹,谢刚,等.单道多工位饵料投喂机控制系统设计[J].价值工程,2015,34(9):37-40.
[21]HISHING.智能化轨道式投饵机[EB/OL].[2017-03-12].http://www.hishing.com/product/HISHING智能化轨道式投饵机-cn.html.
[22]ARVO-TEC.Arvo-Tec control system[EB/OL].[2015-12-15].http://www.arvotec.fi/userData/arvo-tec-2/Controlsystem-Catalog-2016.pdf.
[23] STORVIK.Storvik foringsrobot[EB/OL].[2012-5-12].http://storvikaqua.no/produkter/robot/?lang=en.
[24]TRANSFEED.TransFeed Feeding System[EB/OL].[2012-5-30].www.cowex.com/transfeed.aspx.
[25]郝明珠,徐建瑜,王春琳,等.梭子蟹单筐养殖自动投饲系统设计与试验[J].渔业现代化,2015,42(1):20-23.
[26] ARVO-TEC.Arvo-Tec Robot Feeding System[EB/OL].[2016-1-20].http://www.arvotec.fi/userData/arvo-tec-2/Robot-System-Catalog-2016.pdf.
[27]袁凯,庄保陆,倪琦,等.室内工厂化水产养殖自动投饲系统设计与试验[J].农业工程学报,2013,29(3):169-176.
[28]徐建瑜,王春琳,母昌考,等.一种自走式的自动投饵装置:201310634505.9[P].2014-04-09.
[29]CRYSTALVISION.FISH FEEDER ROBOT[EB/OL].[2017-03-12].http://www.crystalvision.co.il/fish-feeder-robot.
[30]张小刚.物料输送技术与设备[J].黑龙江冶金,2013,33(2):33-34.
[31]景新,樊树凯,史颖刚,等.室内工厂化水产养殖自动投饲系统设计[J].安徽农业科学,2016(11):260-263.
[32]王志勇,湛志新,江涛.集中式自动投饵系统的研制[J].渔业现代化,2011,38(1):46-49.
[33]邓素芳,杨有泉,陈敏.全自动饵料精量投喂装置的研究[J].农机化研究,2010,32(11):103-105.
[34]青岛海月渔用投饵机制造有限公司.STYZ系列自动选料双叶轮渔用投饵机[J].渔业致富指南,2015(3):4.
[35]周晓林.微型定量自动投饵机的设计[J].渔业现代化,2012,39(2):69-72.
[36]焦仁育.投饵机下料机构现状分析[J].河南水产,2011(1):23-24.
[37]徐皓,刘兴国,田昌凤,等.详解渔业投饲机械(上)[J].科学养鱼,2017(1):82-83,29.
[38]郭根喜,胡昱,陶启友,等.一种远程自动投饵机的洒料装置:200910041248.1[P].2009-12-23.
[39]庄保陆,郭根喜,王良运.远程气力输送自动投饵系统分配器设计初步研究[J].渔业科学进展,2008,29(6):133-141.
[40]王勇平,聂余满,谢成军,等.基于机器视觉的养殖鱼群智能投饵系统设计与研究[J].仪表技术,2015(1):1-4.
Progress of research on automatic feeding system in factory aquaculture
LIU Si,YU Guoyan
(College of Mechanical and Power Engineering,Guangdong Ocean University,Zhanjiang 524088,China)
Factory aquaculture is the main production model for intensive aquaculture nowadays,and with its precise feeding performance,the automatic feeding system is one of the most important supporting equipment in intensive factory aquaculture,which can not only reduce feed waste and labor intensity,but also relieve environment pollution.This paper introduces the structure of automatic feeding system,analyzes the present research situation of the automatic feeding system from the aspects of loading transporting system and blanking dripping system elaborates the characteristics,problems and countermeasures of two kinds of mostly adopted centralization automatic system,i.e.pneumatic remote transmission and rail transmission systems.Through the study,it is believed that the closed-loop remote management and control system that integrates water quality monitoring,automatic feeding device and feeding decision system lines with the future development trend.
factory aquaculture;automatic feeding system;pneumatic transmission;rail transmission
S969.31+1
A
1007-9580(2017)02-001-05
10.3969/j.issn.1007⁃9580.2017.02.001
2017-01-02
广东省与湛江市科技攻关项目(2014A020208118、2016A02018);广东省研究生教育创新计划项目(2014JGXM-MS25,2016QTLXXM_52);广东海洋大学创新强校工程项目(Q14209)
刘思(1992—),女,硕士研究生,研究方向:设施渔业与数字化设计。E-mail:928525838@qq.com
俞国燕(1970—),女,教授,研究方向:智能设计与制造、现代渔业装备等。E-mail:yuguoyan0218@163.com
